GPS World held a webinar on new unmanned aircraft initiatives on May 21 led by a panel of experts. On hand were Don Mark of the law firm Fafinski, Mark and Johnson; James Spicer and Adrien Perkins, both students in aeronautics and astronautics at Stanford University; and Peter Cosyn site manager and director of research and development at Gatewing, a Trimble company. I also participated.
Alan Cameron, editor-in-chief and publisher of GPS World, hosted the event and introduced the participants. Around 300 people signed up to listen to the webinar and ask questions.
Don Mark provided a legal overview of the FAA’s regulations for UAS, FAA and U.S. Senate initiatives, James Spicer and Adrien Perkins reviewed the Jäger UAV jammer detection project, and Peter Cosyn provided an overview of the Gatewing/Trimble UX5 UAS solution. I provided insight into recent UAS industry.
Finally, the panel discussed a few of several written questions submitted by the webinar attendees. We promised to publish both these questions and our attempt at providing answers. Please bear in mind that this is new area of technology, applications and regulations governing operations — so we welcome clarifications and inputs as we may miss the mark occasionally!
Q&A for GPS World Webinar:
“New Frontiers in Unmanned Flight: Hey You, UAV!”
- Is the FAA going to keep requiring a pilot’s license to operate a UAV?
The draft sUAS rulemaking proposed by the FAA does not require a pilot’s license. Instead, there’s a requirement to pass an aeronautical knowledge test, obtain an FAA UAS operator certificate and to pass an FAA knowledge test every 24 months. However, the Section 333 exemptions granted by FAA so far have all required that the operator have a private pilot’s license.
- What are the effects (operational, legal) of GNSS receiver failures in UAV missions and what are some technical measures to avoid them?
Most UAS used within a critical or commercial operation not only carry GNSS, but also have some form of navigation back-up system — MEMS inertial being the most common — so navigation is still possible, albeit for a short time with any degree of accuracy. And in the event of a communications link failure, the norm is to have the UAV follow a pre-programmed “return-to-base” route, so the vehicle returns safely to a known location.
- What is the development of UAVs in the healthcare industry?
There are a number of ongoing and proposed applications of drones that are health related. A prototype system in Delft, Netherlands, carries a defibrillator to be used to revive heart-attack victims. The concept is that a network of geographically distributed drones would be called from a cellphone, and the closest UAV would be dispatched and would be able to arrive much quicker than a conventional ambulance.

Other healthcare applications could include the rapid delivery of vaccines, medications and supplies delivered right to the source of an outbreak. This could more rapidly reduce the incidence of life-threatening communicable diseases. Communication equipment, mobile technology and portable shelters could be delivered in a rapid fashion to areas where critical infrastructure damage would prevent ground or typical air transport. Drones have also been used extensively in disaster relief efforts.
Also, in July, unmanned aerial vehicles will deliver medical supplies to a free health clinic in Wise, Virginia. The most urgent prescriptions will be provided by pharmacies located out of town. To get the medicine to the community as soon as possible, the pharmacies will deliver them to their local airport, where they will be collected by NASA’s fixed-winged aircraft and be flown to Lonesome Pine Airport. When the prescriptions arrive there, they will be loaded onto Flirtey drones and delivered to the Wise County Fairground. Flirtey drones are expected to deliver around 24 packages of prescription medication.
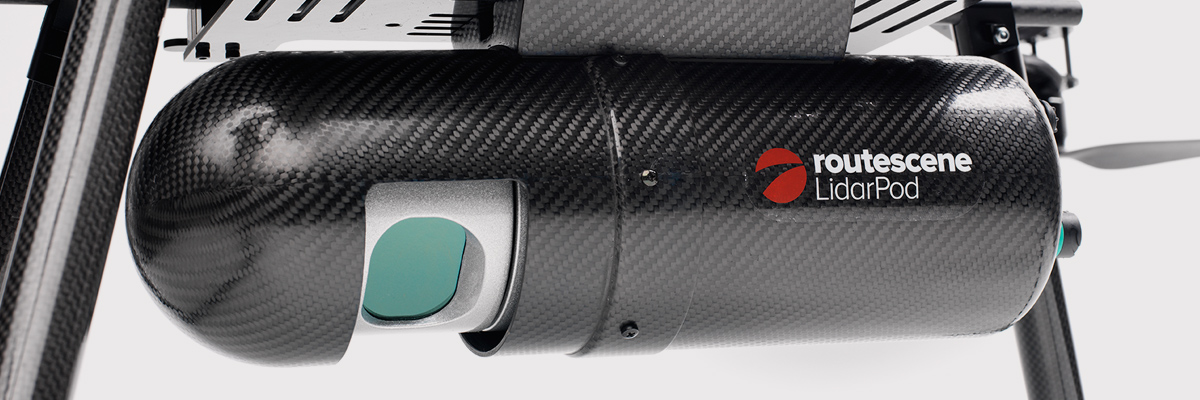
- Please describe LiDAR systems available for UAVs.
There are many lightweight LIDAR systems on the market for UAV applications — some even come integrated within their own operational drone system. Coupling drone-mounted LiDAR systems with vision cameras, advanced computer processing and GPS, it has now become possible to create a remotely piloted flying LiDAR scanner.
- Update us on legal matters within the European Union?
The EU has been very active in preparing for the commercial use of UAS, so drone use in the EU appears to be significantly higher than in North America because of the proactive effort of regulators to introduce drones into regular commercial applications. This Forbes article summarizes the approach being taken and the progress towards introducing regulations within the EU by the end of 2015.
- You speak of “UAV navigation in environments where traditional GPS receivers may fail.” Are you considering indoors navigation or “just” urban environment?
It’s true that drones are being operated indoors — for instance, within restaurants. In these environments, all the typical indoor navigation techniques will be viable — RF/magnetic fingerprinting, Bluetooth beacons, Wi-Fi source databases, cellphone signals including small cells, and even optical sensors, all often combined with indoor maps.
Urban environments with a restricted view of the sky also continue to challenge GNSS only navigation, which has led to extensive use of integrated inertial/GNSS navigation sensors.
- Modularity of UAVs? Different sensors for different types of applications using the same UAV?
A number of professional drone manufacturers offer UAS that could carry different payloads. However, most manufacturers seem to focus on particular applications (flying camera, LIDAR and/or video survey) and don’t carry an extensive range of optional third-party payload equipment.
- What regulations are there for self-made UAS?
It’s hard to imagine that the regulations would be different for a commercially manufactured drone or a home-built UAS. Only time will tell as regulations are developed that include this category of UAS.
- What background and abilities should a team possess if it wants to develop a UAV?
An engineering team that takes on developing a UAV needs to be aware of the basics of flight, navigation and control/communications — these are the principle elements of UAV operations.
- Do you exploit software-defined radio techniques?
Software-defined radios may find their way into UAVs whenever weight/volume are an issue, but they potentially require higher computing capability, and maybe somewhat higher power to run co-processors. Weight and power consumption are at a premium on small UAVs, so any initiative that saves in these areas will no doubt be welcomed.
- What are the emerging application areas for UAVs?
It would seem that the application areas for UAVs are virtually unlimited. High interest areas include agriculture, pipelines, buildings and transmission line inspection, aerial survey, filmmaking and newsgathering, wildlife and environmental monitoring, fishing and military reconnaissance/weapons delivery. But there are many, many applications, some of which might not fit into this summary of applications.
- When will the UAV market move beyond focusing on the drone itself and get to the important topic of what sensor technology and back-office systems provide the best value to the user? The UAV is a commodity.
Good comment — the utility of the UAV comes from the payload it carries and the analysis of the data it collects and how it can be operated.
- I’m curious if the UAV mission will be used in conjunction with autonomous agricultural tractors and construction machinery. I’m assuming an off-site tractor operator would benefit from the aerial data for their scope of work.
Absolutely — another possible UAV application.
- Do you know when high-altitude long-endurance solar-powered UAVs will start being used?
The key application being pursued by Google using high-altitude, long-endurance, solar-powered drones is to provide Internet coverage in areas that currently have no ground infrastructure. A number of countries around the world would benefit from connection to the Internet using this approach. Unfortunately, the prototype aircraft built by Titan Aerospace recently crashed. But Google has vowed to continue with its efforts. Another development, called Project Loon, involves the use of high-altitude balloons and is already well underway.
- I am currently enrolled in the UAV Pilots Certificate Training Program offered through the Unmanned Vehicle University. Is this certificate, which costs $3500, going to actually benefit me in my future commercial operations? Does the FAA recognize it as anything valid? So unless the certificate provides me some practical advantage, I’m not sure if it was legitimate or a scam. Any thoughts on this or experience with this “University”?
A recent Senate bill seeks to establish the six FAA test centers as the authorities for training UAS pilots. However, it would appear that currently no universal training course has yet been developed or approved for UAS pilot training — so it may be premature at this stage to engage with third parties for training until guidelines are published by the FAA.
- What is the positional uncertainty associated with the locational measure of GPS systems on these UAVs? What will it be in five years?
Depending on the application, accuracies between 1 meter and a few centimeters are being achieved. For higher accuracy requirements such as precision surveying, post-processing of data collected during a survey can provide accuracies within a few millimeters.
In five years’ time there will be more satellites in more constellations, and it’s possible that accuracies could improve further. However, the most benefit will come from having more reliable signals, more often, thereby reducing re-test and operational costs.
- What industry do you see being the fastest adopter of UAV technology in the USA?
The U.S. military is already leading in the number of applications, number of operational UAS and number of different types of vehicles. Commercial applications have increased substantially now that the FAA has authorized a large number of civilian operations in the last year or so. There are a number of film and TV applications for movie-making and newsgathering, and this appears to be a growing area for commercial UAS. Aerial survey is also growing in popularity, and there is a huge range of monitoring applications for building inspection, pipeline and transmission line inspection, and also for crop growth monitoring — which may turn out eventually to have the highest number of applications in the U.S.
- How do you think the industry should protect UAVs from GPS spoofing and other forms of remote or internal component (example ICS or SCADA) attacks?
Solutions to mitigate GNSS spoofing and signal jamming are currently high on the list of most receiver manufacturers’ development agendas, with several options already having reached the market. Anti-jam antennas, improved signal rejection in RF front ends, and algorithms that claim to be able to deduce and overcome spoofing attacks — these are the leading solutions that have been fielded. But we have only just scraped the surface of deceptive techniques being used and the frequency with which they are being encountered, so we should continue to see the solutions evolving to counteract more sophisticated interference and spoofing capabilities over time.
- Will the upcoming regulations only impact commercial users, or will they also directly affect non-commercial and/or recreational operators?
In the U.S., regulations governing the operation of recreational or hobby aircraft appear to be less stringent than, say, a drone operating commercially. As long as common sense rules are observed, hobby aircraft operators have been able to operate without the FAA looking over their shoulders — provided they stay below 400 feet in an open space away from sensitive areas such as schools or hospitals and don’t make an inordinate amount of noise, no one has yet proposed more restrictions for hobbyist model aircraft operators. The focus for the FAA is currently on bringing drones safely into the national airspace system for commercial operations, so regulations so far have been mostly formulated to enable this to happen.
- Proposed legislation in the USA refers to one pilot per vehicle; no mention is made of swarming or control of multiple vehicles per pilot. Is it worth developing apps that use swarms of UAVs at the moment?
Certainly, it’s been difficult for the FAA to introduce regulations for UAS that are acceptable for most anticipated commercial operators, while still respecting and protecting current manned aircraft operations. So far, we’ve had case-by-case approval for specific operations, while regulations for small UAS (sUAS) have only just been circulated for comments — and a huge number of comments have been received. So regulations for “regular-sized” and operated drones and for larger vehicles have not yet seen the light of day. So, the more complex applications involving the operation of a swarm of UAS may not yet have been even considered by the FAA. It has taken years to get this far, and we still don’t have any published regulations for any class of UAS in commercial applications, so it’s doubtful that there is any work underway on regulations for swarming drones. So develop apps if you wish, but don’t expect much regulatory support for some time yet.
- What assurance do we have that a UAV operator won’t deliver a weapon instead of an Amazon purchase?
The exemptions that have been published allow certain well-defined, specific commercial operations of UAS. The unmanned vehicle has to be registered to an individual and get a unique tail number. The operators have to be identified and must regularly demonstrate proficiency and adequate knowledge to become a recognized operator. So authorities get to inspect the UAV, know the owner and know the operator, and even get to review and approve the location of each UAS operation — not that that would prevent someone subsequently modifying the vehicle to carry ordinance, or knowingly attacking a target. It would, however, be pretty easy to track down the offender, but that doesn’t really prevent “weaponization” or delivery. But we are only at the small-vehicle-level currently, so its doubtful if major damage would be possible with small weapons, but an individual attack might still be lethal. Careful screening of individuals seems to be the route the regulators have taken to minimize this risk. This is still a difficult issue that is going to take some policing and close control.
- Instead of an actual pilot’s license required for legal flight of a UAV, do you think an all-encompassing UAV pilot’s license will be required? I ask because I am a trained Trimble UX5 pilot, but I do not have my pilot’s license. I also build UAVs, and I am curious how I would get a UAV pilot’s license for a UAV I built? Unless they had an all-encompassing training course for pilot/flight safety.
The FAA proposed rulemaking for sUAS operations did not require operators to have a pilot’s license. Instead, UAS operators are required to undertake a specific recurrent training course for UAS operators, administered by FAA qualified trainers. Regulations relating to “home-built” UAS have yet to emerge, and may be some time away from publication.
- It is said that mainland China has over 70% of the world UAV market? How did we fall so far behind?
Lack of regulations in the U.S. may have held back U.S. industry — see related comments by Amazon in testimony to the U.S. Congress.
But also the absence of restrictions in other countries may have helped overseas manufacturers get established and to gain initial market share. While the majority of done R&D was initially within the U.S., it’s clear that DJI and its Phantom line of drones have become very popular, very quickly. Strangely enough, the largest concentration of buyers and operators currently appears to be in the U.S.
- Insurance against UAVs crashing and causing damage to humans: what progress has been made in this area?
Several insurance companies are now writing risk-coverage policies for UAS, including Global Aerospace, USAIG, Allianz and AIG.
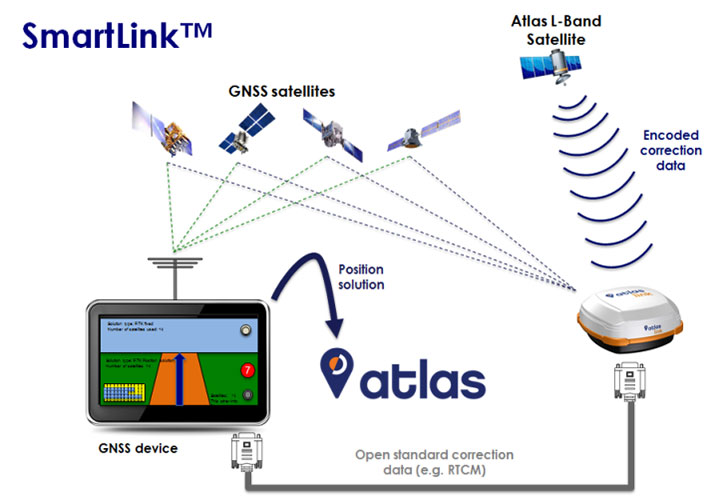
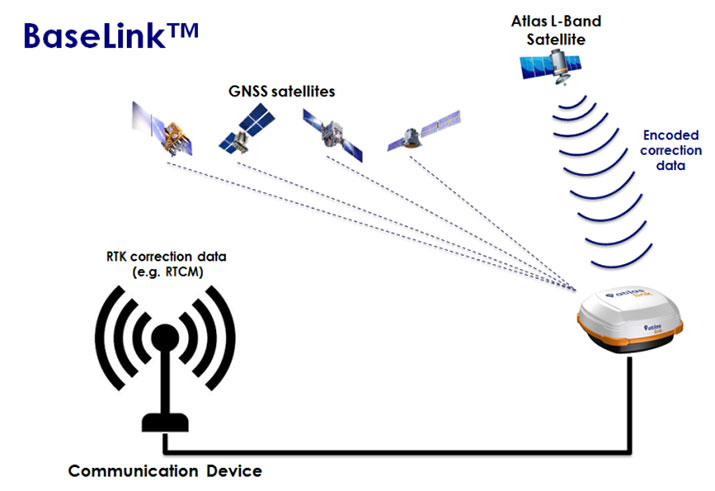
- We are operating a GNSS reference network in Greece, SmartNet-Greece (Leica Geosystems). Is there a tested NTRIP system on UAVs, to be connected and monitored to Ntrip caster? How could this augment real-time GNSS accuracy of UAVs?
Seems like you are trying to get RTCM corrections from a ground network to a flying UAV – correct? So do we need an Internet connection to get your ground network RTCM corrections onto the UAV? I’m not an expert on available mobile Internet hook-ups, but most smartphones have one, so it can’t be that hard to add this onto a UAV. Alternatively, wouldn’t it be easier to have the GNSS receiver on the UAV listen to a PPP broadcast from one of the several services providing these corrections? We could get down as far as 10 cm accuracy with one of these commercially available correction services.
- Talk about the possibilities of precise positioning in UAVs, instead of mapping.
Precise real-time positioning on a UAV is a question of which GNSS receiver is onboard and which PPP or local RTK network transmissions are available in the area of UAV operations. Positioning accuracy is possible of a few centimeters down to a few millimeters post-processed.
- Realistically, how close are we to being able to fly UAVs for commercial applications such as topographic surveys and earthworks applications such as mining sites?
As we heard during the webcast, obtaining an FAA section 333 exemption is quite possible for these applications, and some have already been granted. The FAA has been streamlining the process recently to reduce the time it takes to obtain these authorizations.
- What is a practical ceiling for UAV flight?
The FAA has limited UAS operations to below 400 feet in the Section 333 exemptions that have been granted, while 500 feet is used as the maximum ceiling in the proposed draft sUAS regulations.
- What is status of technology for “see and avoid” requirements for UAVs?
NASA, the Federal Aviation Administration (FAA), General Atomics Aeronautical Systems (GA-ASI) and Honeywell International Inc. have successfully demonstrated a UAS proof-of-concept sense-and-avoid (SAA) system. GA-ASI worked with NASA’s Armstrong Flight Research Center to integrate the new system aboard NASA’s Ikhana research aircraft, a civilian version of the company’s Predator B. The flight-test campaign in November and December 2014 evaluated the SAA system in a wide variety of collision-avoidance and self-separation encounters between two remotely piloted aircraft and various manned aircraft and included a sensor-fusion algorithm being developed by Honeywell.

An RTCA subcommittee is also working in parallel to develop the requirements for an SAA system, and these flight-test evaluations will contribute to those technical standards.
Other companies that are also thought to be active in SAA development include Rockwell/Collins, Sierra Nevada and Insitu/ Queensland University of Technology Australia.
So, a large number of questions on a pretty wide range of subjects — hopefully some of the answers we’ve provided will be of assistance — but please provide us with your comments if you have information to share.
Tony Murfin
GNSS Aerospace
[email protected]
Disclaimer: The statements, questions, views and opinions presented in this article are those of the author and webcast audience, and may not necessarily reflect the opinions of GPS World magazine, its owners or staff. Readers are also warned that the answers are provided on a best-effort basis and could be less than 100% correct.