At the European Navigation Conference held in Bordeaux, France, April 7–10, a keynote session and ensuing panel discussion addressed the issue of “GNSS Resilience for Terrestrial and Naval Applications.” During the discussion, two questions from the floor drew these responses from panelist Jan Wendel of Airbus Defence & Space GmbH, a leading European aerospace company.
Do you believe that receiver manufacturers will be able to deliver resilient receivers in the future?
JW: In order to achieve resilience, regulatory measures can only provide a mid- to long-term solution. Therefore, resilience needs to be addressed at the receiver level as well.
Considering spoofing, I am not aware of any confirmed spoofing incident. Iran has been claiming to have spoofed a CIA drone, which became for me at least theoretically feasible when I heard the rumor that this drone was equipped with a GPS C/A code receiver. Also, there has been a wrongly configured repeater at the Hannover airport. Nevertheless, spoofing to me does not seem to be a current threat.
However, jamming is clearly a reality nowadays. In my opinion, we should first decide which level of resilience we actually want to achieve for which type of user receiver. If the simple receivers like in smartphones become more and more robust against jamming, the simple jammers available on the Internet will react with an increasing jamming power. This will leave less margin for the receivers used in more critical applications, which we really would like to see functioning permanently.
Therefore, resilience for low-end receivers might not be a good idea; maybe it would be better to see them fail in some scenarios.
Another aspect in the discussion we have had so far is the spreading-code encryption for authentication purposes. Actually, I see spreading-code encryption more as a means to restrict the access of a GNSS signal to authorized users and as an anti-spoofing measure, but not primarily as a means for authentication. Here, we must be aware that the access is not necessarily as restricted as we would like to think.
With directive antennas, blind demodulation techniques and a communication link, it is possible with a slight delay to achieve a position, velocity and time solution at a rover, without being an authorized user of the respective service.
We must understand resilience also in a more global sense, that such a possibility must not be detrimental to the applications assuming a restricted access to specific GNSS services.
Do standards help?
JW: In general, standards are a good thing, as they help in the construction of complex systems by assuring interface compatibility and also minimum performances. However, care needs to be taken when the standards are defined. For example, in the NMEA 0183 protocol, essential information is missing that is required for integration of a GNSS receiver with an inertial navigation system, for example, vertical velocity, full variance-covariance matrices of the receiver’s position and velocity, or raw data like pseudorange, delta ranges and ephemeris to name a few. Clearly, the NMEA protocol was not designed for GNSS/INS integration, and for its intended use the NMEA protocol fits perfectly.
However, for many applications, it is not usable. Being a de-facto standard offered by most receivers, I think it would be beneficial if this protocol would follow more a general-purpose spirit, like most of the proprietary protocols of the different receiver manufacturers do. So with the NMEA protocol lacking relevant information, we are in a situation where for many applications either the receiver manufacturers’ proprietary protocols have to be used — given these protocols offer the required information — or the receiver cannot be used at all. For me, this is an example where a standard is not of great help, also because the process of developing such a standard towards an extended scope takes considerable time, if possible at all.
Jan Wendel is a system engineer at Airbus DS GmbH in Munich, Germany, where he is involved in activities related to satellite navigation, including tracking, integrity and sensor integration algorithms. He received the Dr.-Ing. degree from the University of Karlsruhe, where he is also a private lecturer.
It is heartening to see a burgeoning constellation and its operators move on from doubt to certainty, as Galileo prepares for fuller operational capability and the expectations that scope elicits.
To pick up the thread from last month’s column covering keynote speeches at the European Navigation Conference: plenaries subsequent to the opening session focused respectively on “GNSS for Aeronautical Applications: from GPS to Multi-Constellation with Galileo,” and “GNSS Resilience for Terrestrial & Naval Applications.”
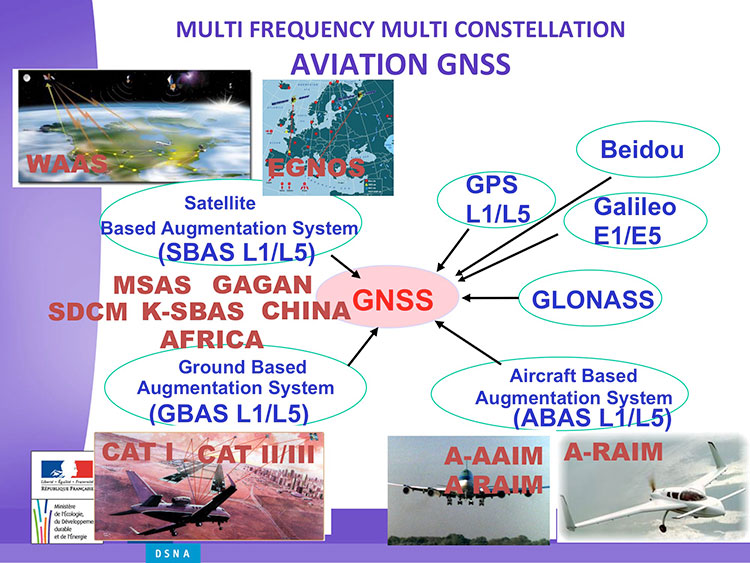
Avionics. Benoit Roturier, GNSS and Performance-Based Navigation program head for the French air traffic control agency, Direction des Services de la Navigation Aérienne (DSNA), reviewed the rather complex assembly of air navigation systems gradually coming together. Not quite — or not nearly — a system of systems, as I understand it, more a conglomeration of systems.
Slide from Benoit Roturier’s presentation on behalf of the French air traffic control agency. (Courtesy of Benoit Roturier)
Multi-constellation GNSS combos, with added context from satellite-based augmentation systems (SBAS), target provision of performance-based navigation (PBN) in all phases of flight, with increased robustness and availability, as well as escalating categories of precision approach and landing. Roturier presaged the SBAS message agreement that also took place in April with his observation that “[The] most benefits are achieved with two constellations — but which ones?” As four constellations and two frequencies deliver “many, many potential navigation modes,” how can air traffic controllers limit complexity while achieving maximum benefits? At the very least, there is a need to agree on main mode and reversion modes.
He gave an overview of upgrades planned, in progress, and completed at airports around France. 141 runways are as of January 2015 equipped with PBN, with GNSS and often EGNOS approaches, compared with 260 still relying on older systems. He concluded with a summary of DSNA views, including “SBAS/EGNOS is seen as a free of charge, performing, mature and here to stay technology, supporting navigation and surveillance (ADS-B) performance requirements.”
By the way, June’s EAGER enewsletter column will cover a recent EGNOS demonstration flight and the current state of runway approaches in Europe. Subscribe here for free.
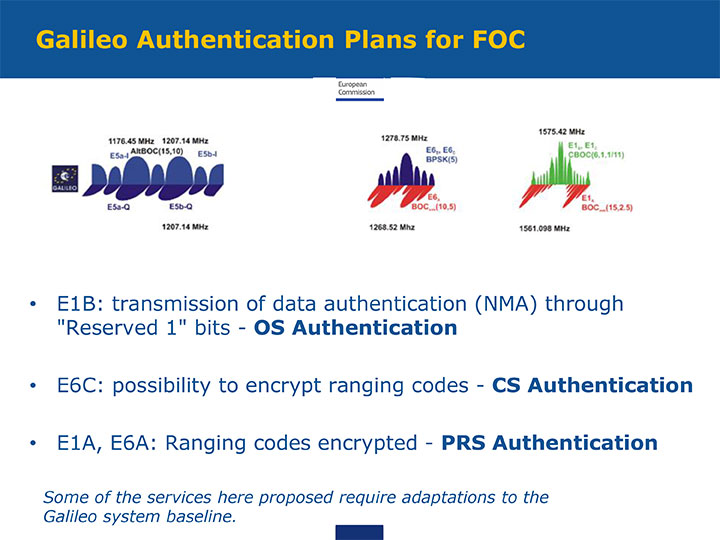
GNSS Resilience. The second plenary, on resilience, brought forth some of the most pointed commentary of the conference. Ignacio Fernández Hernández of the European Commission spoke on Galileo differentiators for resilience: its authentication plans for the Open Service, Commercial Service, and Public Regulated Service, respectively. “The proposed GNSS authentication services are 100 percent backward compatible and interoperable with other receiver-based technologies.”
Slide from presentation by Ignacio Fernández Hernández of the European Commission on Galileo differentiators for resilience. (Courtesy of the EC)
Hernandez proferred the caveat that “some of the required changes to deliver these services (particularly OS authentication) are pending on an impact analysis by industry/ESA and are not yet in the baseline. We hope however to have them in the baseline soon and we’re working hard for it.”
Matteo Paonni of the EC’s Joint Research Centre addressed spectrum management and regulatory issues, specifically the hot-button topic pseudolites. The EC is working closely with the United States and others to limit potential in-band interference risks. Outdoors, pseudolites are clearly undesirable; indoors, they offer some potential, but must be controlled.
Paonni stressed that there is a clear need to protect GNSS spectrum, and that the EC and its member states are doing their utmost to install such protections, and are also promoting GNSS radio-frequency interference detection and mitigation initiatives. Galileo’s PRS is more robust and resilient, but it is not invulnerable. GNSS vulnerabilities should be appreciated and backups put in place for critical systems; backups such as eLORAN, mini atomic clocks, GSM network, and so on.
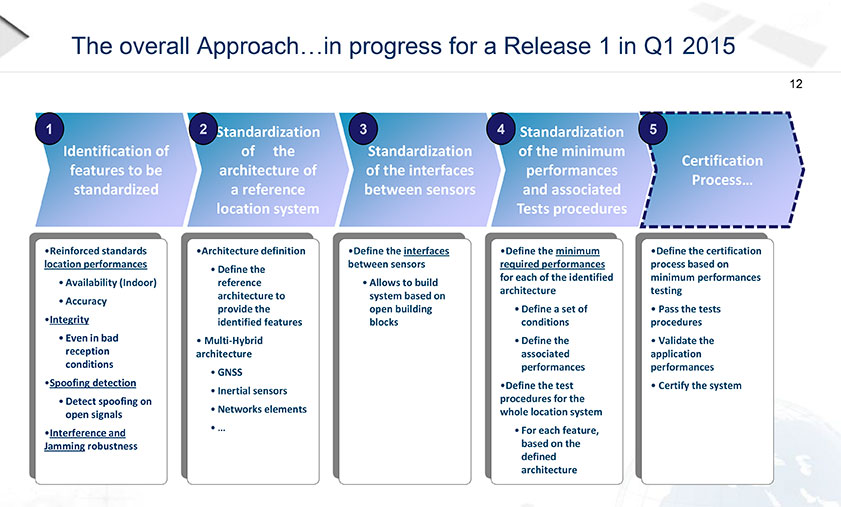
Michel Monnerat of Thales Alenia Space focused on resilience in the road and LBS sectors. With a wide range of environments, devices and applications coming into play, “we need standardization” to specify levels of integrity and levels of performance for each different set of parameters. Thales Alenia is developing just such a set of performance requirements and references, with a first version set for release and discussion soon.
Slide presented by Michel Monnerat of Thales Alenia Space, which is working on a standardization protocol proposal, to be released soon. (Courtesy of Thales Alenia Space)
One of the marvels of the decade is crowdsourcing. This month I look at crowdsourcing for indoor-location positioning and report findings on GPS in smartphones that provide reliable earthquake warnings. Google has had some issues with mapping crowdsourcing, leading to the temporary suspension of Map Maker. If Google can’t block inappropriate content, it does give pause.
Next, I look at connected cars. Since this fall, four out of nearly 50 self-driving cars driving throughout California have gotten into accidents. With connected vehicles about to start popping out of dealerships, the legality of hands-free driving is belatedly being examined. And, last, INRIX has released an analytics platform that will use the massive data coming from connected vehicles.
Crowdsourcing Indoors. Crowdsourcing has worked for mapping, but what about for indoor location? Sensewhere thinks it can work. The company’s indoor positioning technology learns Wi-Fi mapping through crowdsourcing. The premise is that it gets better over time, with each user’s device adding to the Sensewhere database. For instance, Sensewhere’s ability to determine the location of an office door from the building’s lobby will improve with each trip down the corridor. Although other systems may be more accurate, Sensewhere requires no infrastructure. The company claims accuracy of 10 meters or better.
Sensewhere’s solution doesn’t require the Wi-Fi mapping labor that companies like Skyhook initially undertook. Skyhook engaged in “wardriving,” a peculiar term defined by Wikipedia as “the act of searching for Wi-Fi wireless networks by a person in a moving vehicle, using a portable computer, smartphone or personal digital assistant (PDA).” The term “wardriving” originated from “wardialing,” popularized by the 1983 film War Games in which the lead character, played by Matthew Broderick, has his computer automatically dial phone numbers in search of modems, perhaps the precursor to robocalling.
Crowdsourcing for Earthquakes? The GPS in smartphones can detect the earliest signs of a quake with at least a magnitude of 7. The challenge is to distinguish an earthquake from the usual bouncing and jarring every cell phone encounters. Scientists at the U.S. Geological Survey found that if 103 phones in a defined vicinity record the same displacement, there is an overwhelming likelihood that a quake is occurring. The amount of forewarning is very small and maybe only a few seconds, but it could be enough time for a surgeon to retract a scalpel or a person to take cover.
Is Automated Hands-Free Driving Legal? Given the batch of vehicles with automated driving about to land this year and next, you’d think that the answer would be a resounding yes. But it isn’t clear. Only one state, New York, requires drivers to have one hand on the wheel at all times. The law was enacted in 1967 without the impetus of connected vehicles. A handful of states have legalized automated driving in certain instances. It would be more practical for the federal government to step in to avoid a patchwork of regulation. The automotive industry and other boosters would argue that if automated driving isn’t specifically prohibited, it is legal. However, “drivers” of automated vehicles could find themselves ticketed by police, who could deem hands-free driving as “reckless driving.”
Tapping Big Data from Connected Vehicles. Where you go in your car and what you do in it will be used by INRIX in its new Insights analytics platform. Over the years, INRIX has transformed itself from a purveyor of traffic data to a sophisticated driving and traffic analytics player. The platform will use data from connected vehicles for urban planning, retail site selection and advertising usage, leveraging real-time GPS from a network of 250 million vehicles and devices. INRIX introduced InsightsTrips, a data-as-a-service application for understanding population movement across a metropolitan area. InsightsVolume provides information on how many vehicles typically pass a location.
Android Mascot Defacing Apple’s Logo. Not even Google is impervious to spam attacks and obscene edits. Google has temporarily disabled its crowdsourcing map editing tool, Map Maker. The tool, especially important in countries that lack detailed maps, allows maps to be updated with new geographical features and roads. In April, Google improved its spam detection system in response to escalating hacking, but the company’s efforts were not enough. One recent misdeed was the renaming of a business located near the White House to “Edwards Snow Den,” a play on Edward Snowden. However, the prank that seemed to precipitate Google taking Map Maker offline was an image of the Android mascot urinating on an Apple logo that appeared on a map.
The Android mascot could have used the crowdsourced app Sit or Squat to find a more appropriate venue. Crowdsourcing knows few boundaries.
A number of large companies are making bids to acquire Nokia’s HERE digital mapping company. At least one analyst believes the interest is fueled by future autonomous ambitions. In other location industry news, a new location-based analytics product hits the market.
Signaling the need to control a major location industry segment, Nokia’s HERE digital mapping company is attracting big-name suitors for as much as $3 billion. According to published reports, the bidders include Uber, Audi, BMW, Mercedes, Chinese search engine giant Baidu — and even Facebook.
However, at least one industry insider believes the hoopla for HERE, which is found in a majority of in-dash navigation units worldwide, is being driven by the continued interest in autonomous vehicles.
“Google has been openly working on the concepts required to support AVs for several years and Apple has a skunkworks where they are working on prototypes for an Apple AV. The German luxury car makers realize the bind they could find themselves in — as do all vehicle manufacturers — if Google is able to produce a popular AV-oriented OS that is preferred by owners of AVs over an OS produced by the vehicle manufacturers,” said Mike Dobson, TeleMapics principal, who writes about the topic at www.telemapics.com. “I suspect that Google is really focused on an operating system for autonomous vehicles that can help promote Google’s interest in advertising, but will produce a prototype car to show how the system should work, although avoiding large-scale production. Apple, on the other hand, may be considering producing a vehicle that runs on their OS. So while Google is regarded as a more immediate concern for the automobile industry, the company may also become the vehicle manufacturers’ best friend and trusted supplier, if Apple enters the autonomous vehicle market as a vehicle manufacturer.”
While Dobson believes Uber, which bought mapping company deCarta in March, is playing with fire by bidding for HERE, he says they are clearly concerned what the world of autonomous vehicles might mean for their business. “Within 10 years, Uber will be producing its own fleet of AVs. While owning a map company might be beneficial to them, they might be better off licensing map databases,” he said.
Facebook Not a Good Match
Dobson said that while Facebook, rumored to also be a bidder, can afford the billions to buy HERE, there does not appear to be a significant strategic advantage for them in doing so. “While (Facebook) is experimenting with geographical databases, it is unclear to me that they would significantly benefit from owning a spatial database, as opposed to licensing the data, although their concern may be driven by a fear that the data might not be freely licensed after the company is acquired, say, by a competitor,” he said.
The problem with the automotive consortium and Uber that have surfaced in the quest for HERE, the company once called Navteq — and acquired by Nokia for more than $8 billion in 2007 — is that none are data companies — with the background and nuances of creating spatial databases,” Dobson said.
“From my perspective, that means none of the current bidders are ideal candidates to manage the company. Like Nokia, these companies may not actually know what to do when they win the auction,” he said. “During the eight years that Nokia has owned HERE, the mapping asset has been devalued and improperly positioned for growth. I do not know how much more mismanagement the team at HERE can take before the company and its navigation databases becomes non-competitive.”
Dobson says that Uber, Facebook, Baidu, and the German car manufacturers do not yet understand the expense of upgrading and maintaining HERE’s mapping database for the demands of the autonomous vehicle market. “Buying HERE for ‘internal’ use only would be a significant mistake, so any potential buyer is going to need to continue to sell data to all channels, even those owned by potential competitors. This simple reality will cause any of the buyers who have surfaced so far a lot of heartburn in the future,” he said.
Dobson says the clear winner for the future of HERE is the German automotive consortium of Audi, BMW and Mercedes, with its reported alliance with Baidu. “I do not regard this combo as an optimal owner, but the mix of interest may help keep HERE at the forefront of producing high-accuracy navigation databases — although the extent of map coverage may be a casualty of this ownership team,” he said.
New Location Analytics Product Hits the Market
A new location analytics product is hitting the market in a more and more crowded indoor-positioning field. The differentiator, says Cloud4Wi about its new Fogsense product, is that the unit constitutes the location industry’s smallest Internet of Things Wi-Fi device that is tailored to retail outlets, coffee shops, restaurant chains and shopping malls with presence analytics and location-based services.
The device, which contains Broadcom’s WICED chip, will feature Bluetooth low-power technology in the new version in (the fourth quarter), said Elena Briola, Cloud4Wi’s chief marketing officer. The new BLE version will enable Apple iBeacon and location-aware mobile applications.
“We not only track the position of visitors and customers in the venue, we aggregate this data in valuable analytics and we provide applications to deliver targeted localized services based on these analytics,” she said.
The device is also USB-powered, allowing businesses to scale its integration with both single and small venues, where Fogsense receives power from laptops and point-of-sale (POS) devices, the company said.
“Customers increasingly expect Wi-Fi to be available wherever they go. Businesses can collect valuable data about their customers, better understand their behavior and deliver more personalized marketing initiatives,” Briola said.
Like many location analytics companies, Cloud4Wi believes the new product will enable businesses to design push-targeted, localized marketing and advertising messages based on an assessment of the customer’s behavior at the venue.
The company evokes the much-quoted ABI Research statistics that more than 1 million location retail deployments will occur by 2020.
As digital producer for Geospatial Solutions, I spent three days this month covering Unmanned Systems 2015, the huge show hosted by the Association for Unmanned Vehicle Systems International (AUVSI). This was definitely the show at which I gathered the most news and footage of exciting UAV/UAS applications in geospatial technology.
Let’s meet the experts responsible for developing high-altitude color and infrared imagery gathering of a city-sized area, a lower altitude quadcopter for surveying and mapping and a small vertical take-off and landing aircraft developed for use by warfighters that is now ready for first responders and others in small, cluttered, urban environments, giving them an eye-in-the-sky in just minutes.
From the chipset level to fully-featured aerial survey platforms to processing software, AUVSI had it all.
Intro to AUVSI’s Unmanned Systems 2015
The Association for Unmanned Vehicle Systems International’s (AUVSI’s) Unmanned Systems 2015 show, held May 4-7 in Atlanta, convened a global community of commercial and defense leaders in intelligent robotics, drones and unmanned systems.
CEA Research: UAS Could Reach 1M U.S. Flights a Day in 20 Years
The United States will reach one million UAS flights per day within the next 20 years, given the right regulatory environment, according to new economic research from the Consumer Electronics Association.
Exelis Showcases CorvusEye at AUVSI 2015
CorvusEye 1500 is one of the programs Exelis featured at AUVSI 2015. From an altitude of 15,000 feet, CorvusEye 1500 provides color and infrared imagery of a city-sized area unavailable with comparable airborne systems. Bernard Brower, product manager for Exelis, shows us how users work with the real-time analytics and processed data to search for vehicle tracks based on location and time.
Trimble Details New OEM Module at AUVSI 2015
Akshay Bandiwdekar of Trimble Integrated Technologies details the company’s BD935-INS module that features precision GNSS with an integrated 3-D Micro-Electro-Mechanical Systems (MEMS) inertial sensor package. As part of Trimble’s GNSS OEM portfolio, the new compact module augments real-time precise positioning with 3-D orientation.
Septentrio Launches AsteRx-m UAS Reciever at AUVSI Show
Septentrio’s Jan Van Hees talks about the AsteRx-m UAS, an RTK-accurate GNSS receiver solution specially designed for the drone market. The AsteRx-m UAS provides high-accuracy GNSS positioning with low power consumption, according to Septentrio.
NavtechGPS Showcases GPS, GNSS Products for Unmanned Systems
NavtechGPS CTO Franck Boynton explains how AUVSI 2015 attendees can incorporate GPS and GNSS technology into unmanned projects. NavtechGPS represents nearly 30 leading manufacturers of GPS and GNSS products.
NovAtel Showcases FlexPak6, FlexPak-S Receivers
NovAtel’s Peter Soar talks about the company’s FlexPak6 receiver that houses its OEM628 triple-frequency plus L-Band GNSS receiver board. It has a highly configurable interface to ensure precise positioning for UAV applications. Soar explains that its “sister unit,” the FlexPak-S, contains a real-time kinematic GPS receiver with an L-3 XFACTOR Selective Availability Anti Spoofing Module (SAASM). The two receivers are both the same size and fit.
Lockheed Martin Displays K-MAX Cargo UAS Helicopter at AUVSI Show
Lockheed Martin Corporation and Kaman Aerospace Corporation transformed Kaman’s K-MAX power lift helicopter into an unmanned aircraft system capable of autonomous or remote controlled cargo delivery. Jon McMillen explains that its mission for the last three years has been to resupply battlefield cargo for the U.S. military in Afghanistan. McMillen says another possible application for K-MAX is firefighting.
NavCom Technology Offers Navigation and Positioning Capabilities for UAS
NavCom Technology’s Jim Williams explains the precise positioning and navigation solutions offered by the company for UAS. NavCom offers GNSS aerial antennas, RTK positioning and its StarFire global satellite-based augmentation system (GSBAS).
Maxtena Displays L1/L2 GPS Antennas for Use in UAS
Stani Licul, CEO of Maxena, displays some of its antennas for use in UAS. Maxtena’s active rugged antenna is designed for L1/L2 GPS and GLONASS bands for GNSS satellite and RTK applications.
Spirent Federal Systems GSS9000 GPS/GNSS Constellation Simulator
Jeff Martin of Spirent Federal Systems talks about how its GSS9000 simulator can help with UAS development. The GSS9000 simulator supports multi-system, multi-constellation GNSS testing for UAS.
NovAtel Talks GPS Anti-Jam Technology for Use in UAVs
NovAtel’s Peter Soar shares on the company’s GAJT (“Gadget”), a single unit GPS anti-jam antenna for use in UAVs. GAJT nullifies jammers, ensuring satellite signals necessary to compute position and time are always available.
Marty Apa, chief engineer for Exelis’ Integrated Electronic Warfare Systems, shows Geospatial Solutions the Disruptor SRx. The Disruptor SRx electronic warfare technology is small enough to fit into UAS. It also has the ability to switch between multiple functions in real time.
Geomatics USA’s Ahmed Mohamed showcases a UAS that uses the company’s GPS technology to take off and land quadcopters from its structure. Geomatics USA also offers its G-AT: Active Target for surveying and mapping.
Lockheed Martin Corporation Demos Indago UAS at AUVSI Show
Lockheed Martin demonstrates its Indago UAS. The Indago payload system features a quick disconnect adapter which allows the operator to choose the appropriate payload for the mission, according to Lockheed Martin. The payloads are available for a variety of different applications, including agricultural, mapping, inspection and ISR.
Exelis’ Symphony RangeVue Offers Web-Hosted Aircraft Surveillance Information
Christian Ramsey, UAS program manager for Exelis, explains that the Symphony RangeVue enables UAS operators and test-range personnel to have access to both real-time and historical aircraft surveillance information via a web-hosted platform, helping to manage mission operations across multiple locations. Symphony RangeVue can be used as command center decision support and post-event analysis tool, or in the field as a sense-and-avoid addition to UAS ground control stations. Flexible geofencing tools alert operators when a UAS approaches airspace boundaries or other aircraft are in the vicinity.
Spectracom Shows Off Rugged Product Line at AUVSI Show
Spectracom displayed its precise positioning, navigation and timing solutions that leverage GPS/GNSS signals at AUVSI 2015. Capabilities for unmanned aerial systems (UAS) include precision references, signal generation, reception, synchronization, distribution, test/validation, simulation, integration, interference, detection/mitigation, real-time embedded and technical/support services.
Jim Lau with Racelogic details the company’s GNSS Simulator and VBOX Speed Sensor IMU. VOBX is a 100-Hz dual-antenna GPS/GLONASS speed sensor (VBSSISL) that combines signals from an integrated inertial measurement unit with those from GPS to provide smoother output data even when satellite reception is interrupted.
Next year’s show has been branded XPONENTIAL 2016, “An AUVSI Experience,” and will be held in New Orleans, May 2–5. See you there!
The Robotics in Action drone flying area at the AUVSI show.
The AUVSI show in Atlanta, held May 4-7, drew significantly more attention from TV media this year, as several of the major networks provided live coverage from the show floor. NBC’s Today morning show opened with a live shot of a drone hovering in front of an opening house door, as if patiently waiting to deliver a package from Google or Amazon — the potential good side of drones for consumers.
Then their coverage recalled the DJI drone crashing onto the White House front lawn in the early morning hours (perhaps an unfortunate loss of user control, but an odd time and place to be out flying a drone), and airline pilot reports of lighted drones appearing above nighttime final approach paths — the bad side of drones in common usage.
The Connex wireless system.
Then Brian Wynne, president and CEO of AUVSI, provided a positive insight on the latest forecasts of UAV’s contributing $82 billion to the U.S. economy. Wynne’s estimates included the generation of more than 100,000 new high-paying technical jobs within 10 years’ time. But in an effort to urge faster progress towards regulations, Wynne also suggested that for every day of delay in Federal Aviation Administration (FAA) rulemaking to allow open use of drones, the U.S. loses $27 million daily in economic impact.
There was similar encouraging coverage by Fox News from the Atlanta Convention Center show floor, followed by Brian Wynne again pitching for rapid introduction of commercial drone use in the U.S. Fox chose to broadcast from the Robotics in Action drone flying area, and to feature real-time, zero latency HD video transmitted via Amimon’s Connex wireless system. A good demo over live TV, and Amimon’s chance to tell the world about its wireless transmission system that can transmit HD video over up to half-a-mile away with zero latency — good news, incidentally, for Fox, NBC, CNN and other news gatherers.
This year, it also seems that the terminology battle with the U.S. media over the common usage of the term drone or drones, rather than the more accurate UAV or UAV, has been conceded. So now we can talk about drones no matter how much it pains us to do so.
But the FAA is not standing still. Well over 200 Section 333 exemptions have now been granted to allow commercial UAS applications to undertake or investigate revenue-generating business. FAA representatives came to the show to let people know they are working hard to progress towards the safe use of drones in U.S. airspace. Through a media-only press-conference, the FAA announced the B4UFly smartphone app to inform recreational drone operators if it’s safe to fly. Features include:
A clear “status” indicator that immediately informs operators about their current or planned location.
Information on the parameters that drive the status indicator.
A “Planner Mode” for future flights in different locations.
Informative, interactive maps with filtering options.
Contact information for nearby airports.
Links to other FAA UAS resources and regulatory information.
The app will access the user’s location to automatically generate this information. There is also a planning mode for what data could be available for a potential future location to which you may be preparing to go.
But the main news from FAA Administrator Michael Huerta at the press conference was about the Pathfinder program, which involves three U.S. companies undertaking research with the FAA to expand unmanned aircraft operations in the United States. Each project has a key element where boundaries are being stretched to gain experience and to develop new capabilities to overcome restrictions for UAVs.
CNN (Cable News Network) will use visual line-of-sight (LOS) drone newsgathering in urban areas. There have previously been heavy restrictions in most of the Section 333 exemptions on operating in populated areas. So, it would seem that care will be taken in how news coverage will be generated around and over people, but the news will still be working to get the live overhead video we are now seeing more often on TV.
PrecisionHawk and BNSF Railway will investigate operations in rural areas, flying outside LOS. This is big news, as most UAV operators want to extend their areas of operation much further than visual LOS. In particular, Amazon has been most critical about LOS restrictions — the retailer wants package delivery to be virtually automated. But more on that later.
Beyond visual LOS, investigations in largely unpopulated areas by PrecisionHawk and BNSF could result in safe technology and procedures that could be commonly used in populated area for other operators. This is clearly the FAA’s desire, and of course, its intent is also to deflect earlier criticism of lack of progress in this area.
Onto Amazon. The company filed a UAV delivery patent with the U.S. Patent Office, where drone deliveries would be navigated by pulling location data from a customer’s smartphone — and real-time routes and directions would be constantly updated to guide the delivery process.
Amazon’s Prime Air “Delivery Drone.”
Amazon smart aircraft could interact between each other, passing on traffic and weather conditions. Delivery options for the consumer include a tool to deliver packages to your home, workplace or even to vacation locations.
Various safety precautions and caveats appear to have been appropriately addressed in the patent. Use of a number of sensors, including, radars, acoustic sensors and an infrared camera, are outlined in the patent to ensure safe navigation and landing. The patent also proposes a number of different types of unmanned aircraft with different shapes and weight for its delivery system.
And then on Tuesday, May 12, just after the AUVSI convention had wound down and left Atlanta, two U.S. senators jointly proposed a new bill that could expedite the commercial introduction of drones.
The senators believe the U.S. is falling behind other countries when it comes to creating rules for commercial drones. Sen. Cory Booker (D-N.J.) and Sen. John Hoeven (R-N.D.) introduced the Commercial UAS Modernization Act, which would set temporary rules for those who want to fly commercial unmanned aircraft systems before the FAA establishes permanent laws regarding drone use.
Sen. Corey Booker
The Commercial UAS Modernization Act outlines basic rules for commercial use around registration, certification, insurance, tests and safety. Operators would be required to keep the drones under 500 feet, fly only in daylight, and operate within visual line of sight (LOS). However, the proposal also creates a deputy administrator position that would be able to make an exemption for a commercial drone operator for beyond visual LOS and for “heavier unmanned vehicles.”
“Not later than 90 days after the date of the enactment of this Act, the Deputy Associate Administrator, in consultation with the Administrator, shall expedite and expand exemptions from the interim operating restrictions otherwise applicable to unmanned aircraft under section 337,” the act reads.
Sen. John Hoeven
When I talked with Sen. Hoeven this week, he emphasized that this bill seeks to accelerate the commercial use of drones in the U.S. and to make more use of the UAV test centers that the FAA has set up. These centers are capable of doing more, and can be the points that prospective drone operators visit to register their craft and take knowledge and proficiency qualification tests.
The bill gives tight timescales to the FAA to set up accessible locations to achieve registration and set up these operator qualification programs. In addition, the bill establishes a new deputy administrator position responsible for the safe integration of UAS in U.S. airspace, while also streamlining regulations that currently slow the industry’s ability to innovate new aircraft technologies.
In essence, the bill takes the core elements of the FAA’s past Section 333 approvals — less the requirement for a private pilot’s license — and makes them law. Operators would no longer need to ask the FAA for an exemption.
I asked Sen. Hoeven if the FAA has responded to the proposed bill, and he said he would be meeting with FAA Administrator Michael Huerta on May 14. “This follows their rules,” the senator said, so his message is let’s move forward together.
So, it would seem that momentum is at last gathering to overcome what would seem to be a lengthy period of FAA intransigence, including new innovative efforts by the agency itself to find ways to move forward more rapidly. Innovation in UAV technology, products and applications has been going on at a rapid pace, and the pent-up demand seems to be spilling over.
With more than 4,000 comments in hand for the FAA to deal with on its proposed rulemaking for small UAVs, it’s doubtful we’ll have any FAA regulations any time soon. So the Section 333 exemptions will probably continue, unless they are not totally overwhelmed by the new rules proposed by Senators Hoeven and Booker, who hope to see their bill approved sometime this year.
Tim Tebow, GPS, space acquisition, 60 Minutes and the GAO.
One of these things is not like the others. When you first learn this Sesame Street song as a child, where it may be presented as a series of cartoonish pictures, the odd item is usually fairly obvious. Years later, when you encounter this deceptively simple statement on a physics test at Stanford University — where the choices are beguilingly similar formulas or algorithms — the correct answer may be a bit more difficult to determine, and may actually require serious thought.
It seems the U.S. government (USG) acquisition cadre seems to have a similar problem when it comes to recognizing the critical importance of small businesses. The USG has a federally documented mandate and stringent policies (unfortunately, often ignored) in place to support small businesses in the United States. Supposedly, a quota system is in place where, in a perfect world, 23 percent of all eligible contracts should be won and performed by small businesses — the word eligible being the fly in the ointment.
Small Business
For government contractor purposes, what exactly is a small business? This is not an easy question to quantify or answer simply but let’s try. NAICS (North American Industry Classification System) codes specify, among other requirements, the maximum number of employees in a business qualified to compete for contracts of a certain dollar amount — that is one way to designate not only a small company, but their small business qualifications as well. Some companies are not only small in size, but have special qualifications that allow them to compete in a special category for certain contracts; such as being owned by a woman, a Native American, an Eskimo, a handicapped person (any of the five senses), or by the economic success or lack thereof, where the business is geographically located, or the population it serves and employs.
As you can readily see, this small business definition can become unwieldy in a hurry. For our purposes, let’s describe a small business as a company of 500 employees or less that may meet any or all of the aforementioned qualifications, but most importantly meets the operational requirement of having a certain field of expertise for which it is known and at which it excels in. In short, the small company is the domain expert in a certain field of endeavor and typically is sought after by government (municipal, state and federal) and commercial entities alike for their expertise.
Such companies are also sought out by large government contractor competitors known as prime companies that may range in size from several thousand to hundreds of thousands of employees. These companies have historically been likened to a battleship that takes forever to change course. The large primes are the Warren Buffets of government contracting, as they typically have tons of resources and stores of cash, but they historically lack the flexibility, expertise and low cost structure (read low overhead) of the small companies. Therefore, the smaller companies are frequently sought out as critical team members on large government contracts at all levels. Plus, since there is supposedly, in writing anyway, a small business quota system in place, if you can place a small company on any government contract, so much the better. To the prime and the U.S. government, it may be just statistics, but to the small company, it is often a matter of success or failure for the company.
It is a fact of life in government contracting that many times the small companies’ domain expertise is why the prime, who put a winning team together, wins the big contract in the first place. You would think this would ensure success for the small company. However, “build a better mouse trap” and “build it and they will come” are nice clichés, but often get lost in the real profit-and-loss world of government contracting.
In my experience, problems typically come about because both the government and the prime contractors lose sight of why the small, domain expert company is on the team in the first place. Great small companies are so good at what they do, they typically under promise and over deliver and begin to make both the government oversight institutions and the prime look bad. By bad, I mean less efficient, not as capable, and burdened with a plethora of rules and regulations and monstrous overhead rates that rarely apply to small companies.
Don’t think that I have a problem with prime contractors. I worked for two of the largest for many years and they were and are great companies. None of the satellites we have in orbit today would be there without prime contractors. So prime contractors are a great asset to this country and to the space programs, but even large primes occasionally lose their way or fail to deliver.
Acquisition Analogy
Bear with me as I present a simple football analogy some serious thought as it pertains to GPS contracting.
Tim Tebow was/is arguably one of the most famous and sought after American college football quarterbacks of all time. He was the first college sophomore to win the coveted Heisman Trophy, the First round NFL draft pick in 2010, and the winner of two NCAA National Football Championships.
At the conclusion of his phenomenal college career, Tim Tebow held the Southeastern Conference’s all-time records in college football for both career passing efficiency and total rushing touchdowns, appearing second and tenth (respectively) in the NCAA record book in these categories.
Playing his rookie season for the Denver Broncos, Tim started the last three games and became the team’s full-time starting quarterback beginning in the sixth game of 2011. The Denver Broncos were a dismal 1–4 before Tim became the starting quarterback, but began winning with him on the field, playing just as he did in college, often scrambling and running with the football and coming from behind late in the fourth quarter to win. Under his tutelage and leadership, Denver won their first AFC West title and first playoff game since 2005, defeating the Pittsburgh Steelers in overtime.
Tebow the Pro
What happened next? This is where is gets interesting and pertinent to government space acquisitions.
What happened is Tebow changed. He was made to conform to what is viewed as proper professional football behavior. Professional football pundits criticized Tim Tebow for everything from his scrambling and running plays to his obviously devout displays of Christian faith. Statements were made such as “He will get hurt scrambling and running the ball so much, then Denver will not have him as a starting quarterback.” “These college plays he keeps running just don’t work in the NFL.” “Tim needs to wake up and realize he is not in college anymore.”
Amazingly, despite all the critiques, the Tim Tebow college-based solution was working. College plays and Christianity were the formula that worked for Tim in college and was obviously, despite his critics, working well in the NFL, at least for the Denver Broncos. For all the other NFL teams, not so much. Then it all started to come apart, because what the other NFL teams were really admitting to was what psychologists call social phobia or the fear of being embarrassed. In other words, what the other NFL teams were really saying was:
“Come on Denver, we can’t have a college quarterback, using old college plays, defeating the NFL’s finest teams. It makes us all look bad. People pay big money to see NFL teams win on Sunday and Thursday. So get this flea flickering wunderkind under control and come back into the fold. You and your college quarterback are embarrassing the league with your success!”
The Denver Broncos and subsequently other teams in the NFL bowed to pressure and forced Tim Tebow to drastically change the way he played football. The winning formula was shelved, and T2 was made to conform. When that happened, he became the league’s top-losing quarterback. His once accurate passes started to miss their mark because he was told to stay safely in the pocket and not scramble or run with the ball, even though historically his most accurate passes were thrown while on the run. Since he no longer scrambled or ran, he not only lost accuracy but historically the yards he gained running with the football were gone as well. So he rapidly became just what the league declared he should be, not a winning collegiate quarterback in the NFL, but a nominal losing NFL quarterback. At least he was not doing anything outside the norm for the NFL. He was no longer embarrassing the league by winning, but by finally playing by the rules and losing.
Now let’s take the Tim Tebow saga and apply it specifically to federal government GPS acquisitions, or simply to space acquisition practices in general.
Random Scenario
Let’s take a random and totally make-believe scenario and say the federal government requires a new command and control system (C2) for a large global satellite constellation. For purposes of this imaginary scenario, I need to remind you of an old adage, that unfortunately is not imaginary, in the national security space business concerning space C2 systems. It goes like this: The space hardware is 95 percent complete when a team member remarks, ‘Wow! this satellite system is going to be the best in the world at what it does! I can’t wait to see the whole system up and running.” Another team member ponders that statement and replies, “A system, what system? All we have is space hardware. How are we going to launch it, control it (TT&C) and send and receive operational data? Oh yeah, we need a space C2 system. We better get right on that!” You may laugh, but this exact scenario has been played out more times than anyone cares to admit. But, of course, this is all just make believe! Right?
RFI/RFQ
Now imagine for a moment that you find yourself in this situation. As a member of the U.S. government acquisition team, at an SPO or (Special, Space, Strategic, Scientific — take your pick) Program Office, you quickly put an RFI (Request for Information) or an RFQ (Request for Quote) together just to see which companies have the requisite expertise and how much they, the companies, estimate it will cost to complete the C2 system for your constellation. The only problem being that in the RFI or RFQ, which is typically just a few pages, you only delineate the actual basic requirements and you only give the responding companies 30 days to determine how they will go about controlling a constellation you have been building for the last five years. Imagine that! The important part of the scenario is that the RFI/RFQ is actually on the street.
You can be assured most of the five big space primes are going to reply. After all, they have teams of highly qualified proposal writers that do nothing but respond to these requests. While the response process is often a thing of beauty, it is also frequently highly inefficient and misleading. Remember an RFI/RFQ format is almost inconsequential, as it is just the response the government is looking for at this point: Does your company or team of companies have the qualifications to do the work? How long will it take? How much will it cost?
This is far from the end of the story or process. Typically several small companies also respond to Space C2 RFIs and RFQs, primarily because the request concerns their area of expertise, not from a process point of view but from a domain expertise point of view, which may require radically different approaches.
Small technological companies in the space control business are usually flexible and agile, no-nonsense, lean and mean, replete with subject matter experts that specialize in C2 for satellite systems, both commercial and for the USG. They may well be the best in the world at what they do. Alas, they initially and naively think that is all that is required. They may even be under contract to the federal government doing exactly the type of work the RFI/RFQ specifies is needed, but they are frequently overlooked because they are, you guessed it, a small company. However, being small and sometimes naïve, they answer the RFIs and RFQs with enthusiasm, expectations and hope that the system will work and they will be recognized for their expertise, low cost, low overhead and even their outstanding past and present performance. Then, to quote Gilda Radner, “Oh, Never mind!”
Finally, the other shoe drops, as eventually the actual thousand-plus page RFP (Request For Proposal) is released. The RFP has critical detailed data for program success but unfortunately also contains frequently superfluous documentation and tedious requirements lists known as CDRLS (Contract Data Requirements Lists) that commonly reference hundreds of compliance documents so obscure that the USG provides the documents in a special digital online library, because no entity other than the USG would ever bother to keep such sleep-inducing documentation on hand. In this case, 90 percent of the CDRLs do not involve actual C2 of a space constellation, or whatever expertise is required to accomplish the mission, but rather they invariably pertain to some obscure government regulation concerning report formats and interfacing with the government oversight companies and committees.
Too Small To Succeed
Unfortunately we have all heard of companies and institutions that are supposedly too big to fail but what about too small to succeed? In one real-world example, and the USG actually put this in writing, the small expert company that was utilizing its expert system software to actively launch and control spacecraft flawlessly for seven years and is still actively controlling critical space payloads today was told in a competition debrief that they did not fully qualify for the new C2 RFP. Not because of any lack of expertise or past or current performance issues, but because they were too small — not that they could not and were not actually successfully accomplishing the same mission currently (they were the incumbent), but that they did not have the requisite number of personnel to interface with the government on a daily basis during the C2 contracts development phase. This 200+ person small expert company was told they would need to hire another 80 administrative staff just to keep up with the government paperwork and oversight the new C2 program would generate. None of these ‘required’ positions were engineers or subject-matter experts, just paper pushers that generate tons of paper and of charge at a high hourly rate that would add approximately $5M to the contract bid price. True story; sad but true.
So the small company, fully qualified to accomplish the task in record time and for a pittance, a fact nervously recognized by some in the government and by the primes, is not awarded the contract because their hourly rates are half those of the big primes, they can do the work in two years versus six, which for some reason is considered a high-risk proposal, and they do not have the additional 80 staff members sitting around waiting to respond to every government inquiry. Just like Tim Tewbow they were embarrassing the USG and worrying the big primes.
All is not lost. The small company is approached by Prime-A, a large company that is competing for the C2 contract even though they had never launched or controlled a satellite of this type before and are not known for their expertise in the space C2 area. Seeing the handwriting on the wall, the small company agrees to join Prime-A’s team on the six-year $900M effort that the small company was prepared to accomplish for $200M in only 24 months. Twelve months later, the contract is awarded to Prime-A. During the government debrief, one of the primary reasons for the “win” for Prime-A is because they teamed with the right small company — you guessed it, the one with all the domain expertise that was currently doing the work. Smart move by Prime-A.
Ok, so all’s well that ends well, right? Unfortunately, Prime-A now makes a bad move and announces just days after winning the new C2 contract that, having reconsidered their position, now that they have won, they will not be utilizing the tried-and-true operationally proven system from our small expert company, that actually helped them win the contract. No, Prime-A has decided to develop their own brand-new C2 system, become a competitor to the small expert company (a teammate), and allow the government to pay for it all. Of course, the end product, if it is ever successfully developed, will be a totally unproven and proprietary system and will take twice as long, cost five times as much and be far less capable, without any flexibility. But competition is king!
Time Passes
Five years into our imaginary scenario and the C2 program is years behind schedule. The only deliverables the USG has in its possession are those accomplished by the small company partner with the C2 domain expertise, along with invoices from Prime-A that add a 20 percent handling fee or surcharge to all the small company’s accomplishments and that now make the original $900M program a $1.8B program that will only accomplish 50 percent of the original RFP’s stated objectives. The program has moved so far to the right that full completion of all program phases will now take 10-12 years at a cost surpassing $4.2B, during which time all the space hardware will be placed in storage for an additional cost of $1M per space vehicle per year, because the space hardware cannot be launched and fully utilized without the C2 system that makes them incredibly valuable global assets instead of space junk on orbit. More space debris if you will.
Of course, if the small expert company had been awarded the contract or their product had been utilized by Prime-A at the outset, to do the job it currently does so well, valuable space assets would be ready for launch today and ready to benefit mankind worldwide. BTW the USG would also have $1.4B more in its coffers.
But, alas, that is not how our imaginary scenario plays out. In this scenario the small space company experiences the Tim Tebow process and government indoctrination. Their expertise is discounted because they are playing with the “big boys” now, and they are required to hire 80 additional administrative personnel just to compete. They are required to submit all work product through Prime-A that adds an extra 20-50 percent just to process the paperwork and keep the marching army of support staff employed.
As a consequence of the teaming agreement, the small expert company can no longer talk directly to USG representatives who are now suddenly very interested in the original $200M, 24-month proposal. As a member of Prime-As team, the small expert company cannot undertake any independent actions. It is under the thumb of the prime, and the USG will never have the opportunity to take the road less traveled that leads to success and a winning season with a small company. They have been Tebowed!
Rare
Fortunately, the imaginary scenario you just read rarely happens. The USG acquisition teams are very good at what they do, and they rarely allow the scenario described to take place. However, rarely is not “never,” and unfortunately similar scenarios do occasionally take place. Sometimes the USG just makes bad decisions. They fail to realize the true potential and the true domain expertise provided by small expert companies.
Budget
In this budget seques-castration era USG acquisition personnel and decision makers need to look beyond procedures, precedence and tradition. They need to think outside the proverbial box and consider all their options. A satellite C2 system does not require a huge prime company and a marching army of a thousand or more personnel. Constellation C2 can and has historically been accomplished by companies just like the 200+ commercial company in our scenario. Additionally once the USG realizes the prime has failed they need to stop throwing “good money after bad” and restructure the contract, reassign tasks or simply re-compete the contract. As I have said in these pages many times there is not a single satellite constellation in orbit today that requires a $1.6B and certainly not a $4.2B C2 system. And we should not have to wait for 10-12 years for it to come to fruition.
That is outrageous, I hear you say, and you would be correct. But, of course, this is just an imaginary scenario! Surely that never really happened, did it?
To quote Winston Churchill, as I have numerous times, “Gentlemen, we have run out of money; now we have to think.”
60 Minutes and GAO
Recently the investigative news program 60 Minutes has become keenly interested in space and so far it has been a great experience for AFSPC (Air Force Space Command), the United States Air Force (USAF) and the USG. Space and the technology it enables are force multipliers and our freedoms in this great country of ours depend more and more on the space domain and billions of people around the globe depend on GPS for positioning, navigation and timing. GPS is without a doubt the most successful and important constellation in orbit today; bar none. It is a good news story and one of which we can all be proud. Let’s hope it continues to be a good experience.
However, when the GAO, or Government Accountability Office, comes calling the story or experience is not always so positive. The word is out that the GAO has been snooping around AFSPC and several prime space contractors and small space companies as well. As the investigative arm of Congress, government programs rarely fare well or, should I say, sometimes bid “farewell” once the GAO is on the scent. I challenge you to find a single government program manager that can say he is just waiting with fond hopes for Congress to tell him how to run his program.
Bottom Line
This could be an outstanding and pivotal year for NFL football, for Tim Tebow and for USG space acquisition programs, if we all learn the hard lessons from the Tim Tebow experience. Don’t mess with success, and bigger and more sophisticated is not always better.
So, which word in the title is not like the others? Only time will tell.
Until next time, happy navigating, and remember: GPS is brought to you free of charge, courtesy of the U.S. Air Force.
Editor’s Note: This month, we introduce a column by David Doyle, one of our two new survey editors. Doyle brings to GPS World more than 40 years of experience as a geodesist and surveyor with the National Geodetic Survey — see his full bio at the end of this article. He will be joined by coeditor Dave Zilkoski, who will contribute the June column.
David Doyle
Since the mid-1980s, thousands of articles have appeared in peer reviewed journals, trade magazines and professional organization publications that describe the phenomenal capabilities of contemporary space-based positioning systems. The majority have been about various uses of the United States Global Positioning System (GPS) and increasingly include the potential for the inclusion of the Russian GLONASS, European Union Galileo and China’s BeiDou collectively referenced as Global Navigation Satellite Systems (GNSS).
Without meaning to understate the process, the ability for almost anyone, anywhere, at any time to determine a three-dimension position accurate to within a few centimeters is well established. I often comment that the systems are generally so easy to use that if you have the IQ of a squirrel you can obtain pretty good quality data. A feat that until recently was achievable only by the small community of geodesists and geodetic surveyors is now a near-trivial process for anybody who can make a modest investment in some form of positioning system device — and it’s getting better, faster, cheaper and more accurate all the time.
Our ability to collect, manage and display monumental amounts of positional data is also enhanced by the advances in Geographic Information Systems (GIS).
I have been privileged to be a part of this revolution since my initiation into the world of geodetic positioning in 1967, courtesy of the Selective Service System and the U.S. Army, and their use of geodetic triangulation combined with emerging artificial satellite systems such as SECOR (Sequential Collation of Range). These introductions to geodesy eventually led me to a position with the National Geodetic Survey and a career that spanned 40+ years.
During that time, we watched as the centuries-old method of triangulation was replaced by GPS, and as the prices of equipment plummeted with the integration of this technology into a multitude of public, private and academic disciplines — everything from geophysical sciences to weather prediction, precision agriculture, improved marine and aeronautical navigation. The list goes on and on and is well known to those who read this magazine.
So where is this going? What does the title of this article mean?
Doyle working on the Washington Monument.
If we accept, which we do, that all these things are true, then why is it that the world of sharing positional information is filled with scenarios that go something like this? “I got a cm and you got a cm, but our centimeters differ by a meter.” What this means is if these systems are so capable, then virtually all positional data integration should be a snap — everything should fit like a bespoke shirt. Unfortunately, that is often just not so.
Take the case of a decree issued by the U.S. Supreme Court in December 2014 delineating the offshore boundary between the United States and the state of California. The boundary is defined as a set of Universal Transverse Mercator (UTM) grid coordinates published to the nearest mm and referenced simultaneously to the North American Datum of 1983 (NAD 83) and the World Geodetic System 1984 (WGS 84), which the decree states are interchangeable. At the mm level, this is not true. In this area, they differ by approximately 1 m.
The decree provided no information on how these positions were derived, how accurate they really are, and who performed the computations — it certainly was not the Supreme Court. Without pointing fingers at the responsible agency, these all-too-common occurrences seems to be rampant among the many users of high-accuracy positional data, both horizontal and vertical. The crime is often the sin of omission.
The failure in many cases is a lack of knowledge on the part of many GNSS users of some of the basic principles of geodesy and geodetic surveying guidelines and providing complete metadata such as:
what geodetic datums and potentially which realization of those datums were referenced?
what are the units of measure?
how accurate are the positions/heights really?
It’s important to note that the number of digits to the right of a decimal point have nothing to do with accuracy. Land surveyors are taught from their first day on the job that they are following in the footsteps of the surveyor that went before them. It is not unusual for surveyors to struggle with incomplete information from previous surveys to be able to make accurate interpretations of what the original or other previous surveyors intended — a lack of complete metadata.
Today, the massive amount of coordinate and height information being generated by thousands of surveyors, engineers and other disciplines are those footsteps — albeit digital. The multitudes of high-quality data being collected around the world is only as good as the associated information about those values.
As we rapidly approach a time when there will be vastly improved GNSS constellations and very likely cm-level positioning available to millions if not billions of people in cheap handheld devices, the issues of professional education and attention to detail are more important than they have ever been. While it would be really nice if everyone who picked up a GNSS receiver had an advanced degree in geodesy, obviously that is not only unrealistic, it’s senseless. What does need to happen is a comment that I’ve made in hundreds of seminars on these topics — those in professions and disciplines where high-accuracy coordinates are important should know enough to qualify for the Junior Geodesist Secret Decoder Ring!
There are efforts in the works at this time that may bring us a step closer to making this a reality. The American Association for Geodetic Surveying (AAGS) is working on a geodetic surveying certification initiative in collaboration with the National Society of Professional Surveyors (NSPS). This effort will be aimed at anyone who is inclined to collect, manage, distribute and/or utilize the increasing amounts of high-quality positional information.
Watch this space for more details next time.
David Doyle joined the National Geodetic Survey in 1972, and held the position of chief geodetic surveyor for 12 years before his retirement in January 2013. He was responsible for the development, technical design and management of plans and programs that enhanced the United States National Spatial Reference System. During his career with NGS, his experiences included all phases of geodetic triangulation, astronomic positioning, leveling, GPS data collection, data analysis, datum transformations, network adjustments, data publication and outreach in the form of seminars, workshops and webinars. His efforts also included extensive activities to direct and coordinate the modernization of national geodetic reference frames in countries in Africa, Central, Caribbean and South America, Eastern Europe and the Pacific.
Doyle is a past president of the American Association for Geodetic Surveying and a Fellow member of the American Congress on Surveying and Mapping. He has served on the U.S. delegation to the International Federation of Surveyors and is an active member of the District of Columbia, Maryland and Virginia professional surveyors associations. Doyle now operates Base 9 Geodetic Consulting Services.
This year’s European Navigation Conference in Bordeaux, France, got underway with “Good news from up there .…”
Galileo’s seventh and eighth satellites launched successfully in late March, the European Space Agency (ESA) plans four more satellites to reach orbit in 2015, and space maneuvers for Galileo 5 and 6 have been completed, with a recovery plan currently under study. ESA happily confirms that satellites 7 and 8 are in good position, under control, and behaving very well.
Fiammetta Diani, deputy head of Market Development for the European GNSS Agency (GSA), followed her keynote opener with “… some good news also from down here.”
The GSA predicts that the installed base of GNSS devices will triple by 2023, with per capita rates of 2.5 in North America, and 2.3 in Europe and Russia. Around the rest of the world, in eight years nearly every person, on average, will possess a GNSS device.
Axelle Pomies of Galileo Services, an association of industry players active in GNSS applications, stressed the need for a comprehensive, assertive industry policy to support the development of EGNOS/Galileo downstream sector, leading to growth, job creation and autonomy for Europe. She previewed the mid-May publication of a draft position paper in this regard, for wide consultation within the European downstream sector. Follow www.galileo-services.org for its first appearance.
Concluding the ENC plenary, Florence Ghiron of Topos Aquitaine, a regional council of satnav and intelligent transport companies in southwest France, focused on opportunities and risks for small-to-medium enterprises. One of her points: the long development paths of public and regulatory policy do not help SMEs grow.
The Galileo Services and Topos Aquitaine presentations receive more lengthy treatment in my online column mentioned above.
Diani and Ghiron closed with a call to return to Bordeaux in October for the Intelligent Transport Systems World Congress, themed “Towards Intelligent Mobility: Better Use of Space.” GNSS looks to take a more central role than ever in this far-reaching economic segment. Good news — for us — indeed.
High-Precision GNSS Needs Help for Continuous Localization Reliability
By Siamak Akhlaghi
Automotive safety and comfort functions, known as Advanced Driver Assistance Systems (ADAS), have become an essential part of modern vehicles. These functions assist drivers in the driving process, providing capabilities such as adaptive cruise control or highway driving mode. To achieve a desired level of performance, the position of the vehicle must be known. Precise positioning supports the vehicle’s systems with planning, executing and monitoring of a particular maneuver.
Position determination, or localization, is the estimation of the location, heading, velocity and acceleration of a vehicle with respect to a fixed coordinate system. High-precision GNSS provides an excellent, worldwide, absolute position reference for localization. However, GNSS technology alone has limitations that must be overcome to make it suitable for use in autonomous systems. For instance, GNSS signals may become blocked or lost due to: obstructions such as in urban canyon or tunnels; multipath, where signals are reflected off the vehicle body; or signal interference from other RF signal sources.
Siamak Akhlaghi
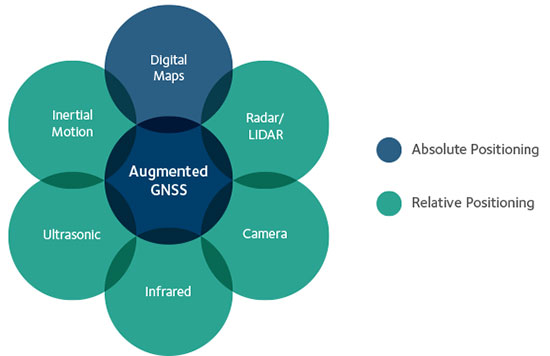
GNSS correction data and data from other sensors on the vehicle can be used to improve the accuracy and reliability of the vehicle localization solution both globally and with respect to the local environment. To achieve the localization performance, accuracy and integrity required for autonomous vehicles, a multi-system, sensor fusion approach seems to be the most promising. Localization systems will require absolute positioning references like precision GNSS as well as local or relative positioning inputs from inertial sensors, odometers, radar, LiDAR, cameras, infrared and ultrasound sensors. It is clear that no single technology will make highly automated driving possible. Rather, the fusion of the entire vehicle’s sensing technologies will provide the localization accuracy and reliability required.
Achieving Accuracy and Reliability with GNSS
GNSS has revolutionized localization in many applications, from precision survey to agricultural guidance. For autonomous driving applications, localization accuracy of 30 centimeters (cm) or less is required. The single-frequency, auto-grade GNSS receivers that have been used in vehicles up to now cannot achieve this level of accuracy. Multi-frequency GNSS receivers utilizing Precise Point Positioning (PPP) correction techniques can achieve accuracies better than 10 cm. PPP algorithms combine GNSS satellite clock and orbit correction data from a global reference station network with high precision GNSS receiver satellite observations to yield robust sub-decimeter positioning without the need for local base stations. Since the PPP corrections can be delivered via satellite, the solution is ideal for highly automated driving where communications infrastructure is costly and in some areas may not be available. Recent advances in PPP techniques provide robust positioning and the ability to quickly regain full accuracy following a temporary loss of GNSS signals, for instance under foliage or highway overpasses.
Figure 1. High-precision / localization with sensor fusion.
Sensor Fusion
Occasional instantaneous irregularities and temporary outages of GNSS can be compensated for by incorporating measurements of the vehicle motion from inertial sensors mounted in the vehicle. An advantage of a tightly coupled GNSS-inertial solution is that the low frequency errors inherent to inertial sensors can be compensated for and removed from the solution. As a result, sensor fusion algorithms provide a highly robust and stable localization solution at data rates as high as 200 Hz. Other sensors in the vehicle, such as odometers, cameras or LiDAR, can also give information about the relative motion of the vehicle and can add to the redundancy, reliability and stability of the localization solution.
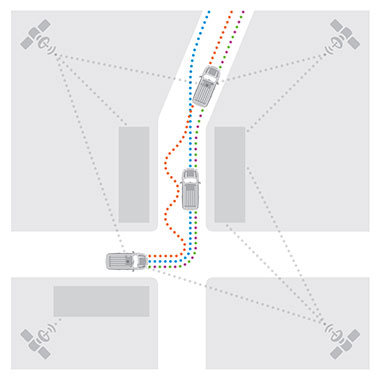
Figure 2. With a tightly coupled GNSS-inertial solution, low-frequency errors can be removed from the localization solution. The brown dots are the GNSS solution, the blue dots are the inertial solution, and the combined colors represent the tightly coupled solution.
High-Precision GNSS Antenna
Antennas play a critical role in achieving precise localization with GNSS. While GNSS antenna requirements differ depending on the application, ideally the antenna should receive only signals above the horizon, have a known and stable phase center that is co-located with the geometrical center of the antenna, and have perfect circular polarization characteristics to maximize the reception of the incoming signals. Highly automated driving applications demand high performance as well as compact size and strong interference rejection. Achieving the required performance amidst these challenging constraints will require innovative new GNSS antenna designs.
Autonomous driving will be a reality in the not-too-distant future. Innovation in the suite of sensors and fusion algorithms used for solving the localization challenge will be paramount to making safe and reliable autonomous vehicles. Further, innovation developed for automotive autonomy will support new autonomous vehicle applications in other segments.
High-precision antennas are key.
Siamak Akhlaghi is segment manager for Autonomous Systems at NovAtel. He has 20 years of professional experience working for high-tech sectors with broad experience in inertial sensors and navigation systems.
From left: Dennis McCarthy, Wayne Hanson, Ronald Beard and William Klepczynski
By Dennis McCarthy, Wayne Hanson, Ronald Beard and William Klepczynski
Once again we are going to adjust the world’s clocks by one second. This time it will happen on June 30, when we insert another leap second in Coordinated Universal Time (UTC), the standard international time scale. In theory, all UTC clocks should insert a second labeled 23h 59m 60s (the leap second) following one labeled 23h 59m 59s UTC. This is equivalent to having all of the clocks in the world stop for one second at that time.
Are you ready for it?
The last leap second occurred two years ago on June 30, 2012, and the continuation of the process of making these one-second adjustments has stirred a growing controversy over the last few years.
How did the leap second come about — and why do we continue making these sporadic adjustments?
From Sun to Caesium
Historically, it has been easy to make use of the apparently uniform repetition of various astronomical phenomena to measure the passage of time. We’re familiar with the Sun rising and setting, and this regularity provides us a convenient measure of time: the solar day. In recent times until 1960, the average solar day was used as the basis for timekeeping, and if we divide the day into 24 hours, each containing 60 minutes made up of 60 seconds, we can define the second as 1/86,400 of the mean solar day. This meant that the length of the second depended on the Earth’s rate of rotation because it is the rotating Earth that causes the Sun to appear to move across the sky.
In the mid-1930s, astronomers concluded that the Earth did not rotate uniformly as measured by the most precise clocks then available. This causes the duration of a second to vary as the Earth’s rotation rate varies. We now know that a variety of physical phenomena affect the Earth’s rotational speed, and consequently this definition of a second became impractical for applications that require a truly uniform time scale. So, in 1960, the second was redefined in terms of the Earth’s yearly orbital motion around the Sun. The time scale provided by this astronomical phenomenon was called Ephemeris Time (ET), to call attention to the fact that its realization depended on the conventionally adopted positions and motions (that is, the ephemeris) of the Sun (or Moon) that was used in the analyses of the required astronomical observations. The second defined in this manner was called the Ephemeris second.
Although Ephemeris Time does provide a more uniform measure of the duration of a second, it is inconvenient to make the necessary astronomical observations that would be required to maintain a practical time scale for applications that demand high precision. So, in 1967, the second was redefined again, this time in terms of the frequency of an energy level transition in the Caesium atom, which had already been calibrated with respect to Ephemeris Time by using astronomical observations of the Moon’s motion. Caesium frequency standards, by the early ’60s, had become known as reliable, uniform, accurate and precise clocks. The second defined in this way provided, and continues to provide, a uniform standard of time that can easily be measured in a laboratory with greater precision and accuracy than any astronomical phenomena.
Lab Clocks Rule
Although the second defined using the frequency of an atomic energy level transition does provide a unit of time duration that is precise and uniform, it does mean that the passage of time measured in this way is no longer connected to astronomical phenomena. Indeed, with the advent of more accurate observational techniques, astronomers could measure variations in the Earth’s rotation rate by measuring its changing orientation in space and comparing the rate of change with laboratory clocks. They established that among the various variations in the Earth’s rotation rate is the gradual slowing down with respect to a uniform atomic time scale. This deceleration is consistent with theoretical tidal effects and observed terrestrial deglaciation.It is also apparently consistent with ancient observations of solar eclipses, indicating that that this slowing has been going on for thousands of years
As a result, if we were to observe a recurring astronomical event, we would see it happening earlier from day to day. To bring our clock back into agreement with the astronomical event, we would have to add some time to the face of our atomic clock. While astronomers can cope with this situation by applying the appropriate corrections derived from astronomical observations that measure the Earth’s rotation rate, navigators that relied on astronomical observations to determine their positions considered this situation problematic.
When the definition of the second based on the Caesium atom was introduced, it was known that there would be a time varying discrepancy between a clock running at a uniform rate and a theoretical one using a second defined by the Earth’s rotation rate. Starting from 1961, the observed discrepancy was modeled by making small adjustments on the order of a few milliseconds (thousandths of a second) to our clocks at first, and later by making small adjustments to the frequency of the atomic clocks from time to time, usually on an annual basis. This meant that the duration of a second could vary depending on when it was measured.
No More Changes
In 1970 the International Radio Consultative Committee (CCIR and now known as the International Telecommunications Union Radiocommunications Sector, or ITU-R) in collaboration with other international agencies adopted a definition of UTC that did away with any periodic changes to the duration of the second. Instead it was decided that the discrepancy between UTC and the observed rotation angle of the Earth would be accounted for by making one-second adjustments when needed, so that the absolute difference between UTC and the Earth’s rotation angle measured in time units would always be less than 0.9 seconds. A finer correction would also be provided frequently so that the Earth’s rotation angle in time units designed as Universal Time 1 (UT1) could be derived to 0.1 second precision.
It was specified that the one-second adjustments, either positive or negative, were to be made preferably at 23h 59m 59s on the last day of the months of December or June, but could also be made, if necessary, at 23h 59m 59s on the last day of the months of March and September, and further if required at 23h 59m 59s on the last day of any month. The implementation of this definition actually began in 1972, a year in which two leap seconds were introduced.
These one-second adjustments came to be known as “leap” seconds by analogy with the “leap” day inserted in calendars. This definition then fixed the second in UTC to be uniformly established as the international standard atomic second defined by the resonance frequency of Caesium and known as the SI (Système International) second.
Compromise Overcome by GNSS
The introduction of the concept of the leap second was historically a compromise with practitioners of celestial navigation who needed to base their observations on astronomical time to determine their longitude. If UTC doesn’t differ from the observed rotation angle of the Earth by more than a second, navigators could use UTC directly as a substitute without introducing a systematic error greater than a quarter of a mile. However, the routine practice of using celestial navigation has been overcome by the success of Global Navigation Satellite Systems (GNSS), inertial navigation systems, and radar navigation.
In fact, the U.S. Naval Academy stopped including celestial navigation in its curriculum in 1998. In the time span since the introduction of the idea of a leap second, computer networks, wireless telecommunication systems, satellite communications, telephone networks, air traffic control systems and even industrial processes have developed to the point where precise time is an essential component of their successful operation. Users and suppliers of these systems are concerned with the impact of sporadic, essentially unpredictable, one-second adjustments.
Most of these modern systems derive their time using GPS timing receivers. Although the navigational solutions make use of GPS System Time, these receivers provide UTC by means of a broadcast correction that provides the time-varying difference between GPS System Time and UTC. This correction normally provides the varying difference between the two times to less than a microsecond but must also keep track of when a leap second is introduced. As the leap second changes occur sporadically, there may be worries that problems could arise because hardware or software may never have been tested thoroughly for a leap second occurrence. As a result of these concerns, as well as the cost of stopping all of the clocks in the world for one second, the ITU-R has been discussing a possible revision of the definition of UTC by dropping the future use of leap seconds.
Leap or Not Leap?
The question of the future of UTC was raised in 2000 with the suggestion of modifying it to be a continuous timescale without leap seconds. Consideration of this question is still ongoing. The 2012 World Radiocommunication Conference (WRC-12) identified this issue as urgent, requiring further examination by the 2015 World Radiocommunication Conference (WRC-15) “to consider the feasibility of achieving a continuous reference time-scale, whether by the modification of Coordinated Universal Time (UTC) or some other method, and take appropriate action…”.
With the aim of providing adequate technical background for WRC-15 to make an informed decision on this issue, the International Bureau of Weights and Measures (BIPM) and the ITU agreed to organize jointly a workshop on the future of the international time scale. This workshop was held in Geneva, Switzerland, in September 2013. It provided a unique opportunity to present available information on current and possible future precise frequency and time standards, sources and their characteristics, time scales and dissemination systems and different views on the future of UTC.
Contributions to the workshop were specifically invited to ensure that the breadth of the issue would be covered. Included were the relevant international organizations (the International Astronomical Union, the International Earth Rotation and Reference Systems Service, the International Union of Geodesy and Geophysics, the International Organization for Standardization, the International Maritime Organization, the International Civil Aviation Organization, the Union Radio-scientifique Internationale), the providers of GNSS services (GPS, GLONASS, Galileo and BeiDou), the national metrology institutes that realize and maintain local representations of UTC, the ITU member administrations, and the ITU-T and authorities responsible for electronic time services. Information on the workshop, agenda and presentations is available.
Final Decision in November
A special issue of ITU News magazine dedicated to the workshop has also been published; an online version is available. It did not provide a decision on the issues, but rather a forum for issues to be discussed, since there is some controversy over modifying the global reference time scale. The final decision is to be made at the WRC-15 in November when the method for satisfying the feasibility of achieving a continuous time scale will be determined as well as how it would be implemented.
As preparations begin for the June leap second, hardware and software will undergo testing. This process is likely to be repeated for some time to come, even if the decision to eliminate the use of leap seconds in UTC is made. Legacy systems reliant on the use of leap seconds will require an adequate period of time to adapt to any change in the definition of UTC. If the suppression of leap seconds would be decided, it is recommended that a period of time no less than five years be allowed before the Final Acts of the WRC-15 go into effect. So, leap seconds could be with us for some time yet.
Editor’s Note: For an earlier discussion on the leap second by McCarthy and Klepczynski, download the Innovation article “GPS and Leap Seconds: Time to Change?” from the November 1999 issue of GPS World.
Dennis McCarthy is retired, and serves as a contractor with the U. S. Naval Observatory, where he was science advisor, director of the Directorate of Time, and head of the Earth Orientation Department. Internationally, he has served as president of the Commissions on Time, Commission on Earth Orientation, and Division 1 (Fundamental Astronomy) of the International Astronomical Union (IAU). He was also secretary of Commission 5 of the International Association of Geodesy.
Wayne Hanson has been a consultant and president of Time Signal Engineering since his retirement in 2001 as chief of the Time and Frequency Services Group in the Time and Frequency Division of the National Institute of Standards and Technology. He is the U.S. chairman of the International Telecommunication Union – Radiocommunication Sector, Working Party 7A concerned with Time Signal and Frequency Standard Emissions.
Ron Beard is the head of the Advanced Space PNT Branch at the Naval Research Laboratory and International Chairman of ITU-R Working Party 7A, Precise Time and Frequency Broadcast Services. During the early development of GPS in the 1970s, he was the project scientist in the NRL GPS Program Office that developed Navigation Technology Satellites One and Two that operated the first atomic clocks in space.
William Klepczynski is now retired. During his career, he was a consultant to the Institute for Defense Analyses and the head of the Time Service Department of the U.S. Naval Observatory, where he managed the USNO Master Clock, timing operations for GPS and time distribution systems that utilize communications and navigation systems.
This year’s European Navigation Conference (April 7–10 in Bordeaux, France) got underway with “Good news from up there .…”
Galileo’s seventh and eighth satellites launched successfully in late March, the European Space Agency (ESA) plans four more satellites to reach orbit in 2015, and space maneuvers for Galileo 5 and 6 have been completed, with a recovery plan currently under study. ESA also happily confirms that satellites 7 and 8 are in good position, under control, and behaving very well.
Fiammetta Diani, deputy head of Market Development for the European GNSS Agency (GSA) followed her keynote opener with “ . . . some good news also from down here.”
The GSA has just published a new document on the NeQuick Ionospheric Model, used to compensate ionospheric errors on Galileo and other GNSS signals. The document, titled “European GNSS (Galileo) Open Service Ionospheric Correction Algorithm for Galileo Single Frequency Users,” and downloadable, contains detailed description and results from years of intense research.
Ionospheric Model
The NeQuick model improves accuracy levels globally when using single-frequency services, even during hyperactive periods of the 11-year solar cycle, according to the GSA.
(Last year, authors from the European Space Research and Technology Centre (ESTEC) at the European Space Agency (ESA) published an article in GPS World magazine, “Innovation: the European Way,” as the Innovation column edited by Richard Langley. From Langley’s introduction to the article: “The ionosphere is a dispersive medium for radio signals, so by making measurements simultaneously on two frequencies transmitted by a satellite, most of the effect of the ionosphere can be removed. However, single-frequency devices such as most vehicle navigation and handheld receivers don’t have the luxury of dual-frequency correction. These devices must rely on a single-frequency correction model. The coefficients for such a model are included in the navigation messages transmitted by all GPS satellites. Known as the Ionospheric Correction Algorithm or Klobuchar Algorithm, it removes at least 50 percent of the ionosphere’s effect.
“The Galileo satellites also include the parameters of an ionospheric algorithm, called NeQuick G, in their navigation messages. In this month’s column, the Galileo system design team describes the novel European way for modeling the ionosphere for single-frequency users and compares its performance to the current GPS approach.”
The online version of the Innovation column contains an extensive Further Reading list, including resources on the GPS (Klobuchar) ionospheric model.)
Receivers operating in single-frequency mode may use a single-frequency ionospheric correction algorithm,which is given in the report in the form of two equations, to estimate the ionospheric delay on each satellite link. The Effective Ionisation Level, Az, is determined from three ionospheric coefficients (broadcast within the navigation message) and the Modified Dip Latitude (MODIP) at the location of the user receiver. MODIP is expressed in degrees and a table grid of MODIP values versus geographical location is provided together with NeQuick G model. The receiver then calculates the integrated Slant Total Electron Content along the path using NeQuick G and converts it to slant delay using a stated equation for ionosphere group delay (delay on the pseudo-range or signal code phase), neglecting higher order terms.
A further section of the report describes practical guidelines for the implementation of the single-frequency ionospheric model within Galileo user receivers, with sub-sections detailing:
Zero-valued coefficients and default Effective Ionisation Level;
Applicability and coherence of broadcast coefficients;
Effective Ionisation Level boundaries;
Integration of NeQuick G into higher level software;
Computation rate of ionospheric corrections.
In a document annex titled “Performance Results,” the performance of the model is compared with that of the GPS Ionospheric Correction Algorithm (ICA) algorithm, also known as the Klobuchar model.
“As an example of the behavior of the two models as a function of the time of day, the delay computed using Klobuchar and NeQuick G are plotted as a function of the satellite elevation and of UTC in Figure 5. For this example, in order to have a direct comparison between the two models, the delays computed using Klobuchar and NeQuick are compared with respect to the delay estimated using Global Ionospheric Map (GIM). The plots have been computed for a station in latitude [deg] 40.8234, longitude [deg] 14.2161, altitude [m] 122.6590 m, using GPS satellite PRN 11 and for day 16 of year 2010 characterized by quiet geomagnetic activity.”
Several further figures and tables within the document annex give more details on the performance results obtained.
The NeQuick electron density model was developed by the Abdus Salam International Center of Theoretical Physics (ICTP) and the University of Graz. The adaptation of NeQuick for Galileo single-frequency ionospheric correction algorithm (NeQuick G) has been performed by the European Space Agency (ESA) involving the original authors and other European ionospheric scientists under various ESA contracts.
GNSS Market
In market forecasts, Diani related some high-level results from the GSA’s 2015 GNSS Market Report. Among other insights, the GSA predicts that the installed base of GNSS devices will triple by 2023, with per capita rates of 2.5 in North America (currently 1.4), and 2.3 in Europe and Russia (now 1.1 and 0.8, respectively). Around the rest of the world, in eight years nearly every person, on average, will possess a GNSS device. Currently rates are 0.5 in South America, 0.2 in Africa, and 0.4 in the Middle East and non-Russian Asia.
Galileo Services: Proposal for an Industry Policy
Axelle Pomies of Galileo Services, an association of industry players active in GNSS applications, stressed the need for a comprehensive, assertive industry policy to support the development of EGNOS/Galileo downstream sector, leading to growth, job creation, and autonomy for Europe.
As stated in her presentation, GNSS market trends do not currently favor Europe, as the continent aggregately currently holds a market share of less than 20%, whereas the usual European market share in other high-tech sectors is around 33%. European GNSS downstream industry suffers from a competitive disadvantage vis-à-vis industry from other regions, because dedicated national programs/strategy in the United States, Russia, China, and Japan support competitiveness of their respective industries and enhance GNSS market take up, including funding from R&D to manufacturing capabilities; regulation; and massive public procurement. Europe has none of these, or at least not to the same degree.
Among the risks this entails for European Union autonomy are that Galileo may not be used as intended; there is little predicted interest for most user applications to track four constellations. Meanwhile GPS, GLONASS and BEIDOU are already in place.
She cited a number of key GNSS application markets where European industry must position itself strongly and securely. In her view, the most promising markets in terms of growth potential and strategic placement include:
Road (intelligent transport systems, connected vehicles, and advanced driver asisstance systems, or ADAS)
agriculture
autonomous/unmanned vehicles
rail
timing
critical infrastructures
multimodal logistics
defence
Internet of Things.
In that regard, Pomies posited the necessity of a comprehensive and assertive industry policy to support the development of EGNOS/Galileo downstream sector, with the goals of fostering the use of European GNSS infrastructures; encouraging European Industry to develop EGNSS equip/apps; fostering the manufacturing of E-GNSS based solutions in Europe; and supporting the European industry competitiveness in the GNSS global market and fostering the emergence of European champions.
Support from European and national institutions is necessary for the full success of the EGNOS programmes, she said, and she previewed the mid-May publication of a draft position paper from Galileo Services in this regard, for wide consultation within the European downstream sector.
Key Issues in Intelligent Transport and Location-Based Services
Concluding the ENC plenary, Florence Ghiron of Topos Aquitaine, a regional council of satnav and intelligent transport companies in southwest France, focused on opportunities and risks for small-to-medium enterprises. One of her key points regarding the intelligent transport systems market: the long development paths of public and regulatory policy do not help SMEs grow.
Today, several GNSS-based road schemes are already operational, but they tend to be limited to specific applications, to regional areas and/or to specific classes of vehicles, for example, trucks above a certain weight !
Moreover, each country tends to work with their national champion. This has led to fragmentation of the targeted markets all over Europe. Thus, the need for interoperability between schemes is an increasingly important factor.
Among her major recommendation for supporting application and business development:
Support GNSS stakeholders at promoting their innovative GNSS applications towards the largest possible community. This encompasses:
• Visibility of GNSS mature solutions/applications
• Cost-benefit analyses for already developed GNSS-applications
• Identification of the best ways/means to help SMEs promote their offers towards public purchasers
• Development of a Directory of European regional and national contact points
She further proposed additional funding mechanisms for SMEs to bridge the gap between the R&D step and the industrialization/market development phase.
Finally, help medium/small regions and cities to purchase or procure the innovative GNSS-ITS applications they need to answer their public transportation/mobility needs.
Further information on the Topos project SUNRISE (Strengthening User Networks for Requirement Investigation and Supporting Entrepreneurship), a European project managed by the GSA, may be found at www.topos-aquitaine.org.
Back to Bordeaux in October
Both Diani and Ghiron closed their presentations with invitations to return to Bordeaux in October for the Intelligent Transport Systems World Congress, themed “Towards Intelligent Mobility: Better Use of Space.” GNSS looks to take a more central role than ever in this far-reaching economic segment.