Belgium has launched its first smart highway test environment. Septentrio GPS/GNSS receivers are integrated into vehicles and infrastructure to provide dependable, high-accuracy positioning and to aid sensor fusion in driverless navigation and truck platooning.
Septentrio’s high-precision GPS/GNSS technology will be one of the key components in a Smart Highway system, which launched April 8 with a live demonstration in Antwerp, Belgium. A section of a highway will be dedicated as a test environment for technology which prepares Belgium for automated driving and truck platooning.
When vehicles are aware of each other’s position and velocity, road efficiency and safety can be significantly improved by smoothing traffic flow and automatically breaking if slowing traffic is detected ahead.
Roadside units along the highway will feature GNSS receivers acting as reference stations, sending out continuous positioning corrections. Onboard GNSS units will use these corrections together with built-in quality indicators to calculate trustworthy, sub-decimeter positioning. They will also provide precise timing for syncing the multitude of sensors onboard these “smart vehicles.”
“We are excited to be a part of the Smart Highway testbed which is aimed at improving road safety and traffic flow,” said Jan Van Hees, business development director at Septentrio. “The automotive ecosystem is undergoing a shift towards automation enabled by the latest technology in communications, sensors and precise positioning. Our role in this project builds upon our strategy to continue providing high-accuracy, reliable positioning solutions aimed at the automotive industry.”
The Advanced Interference Mitigation (AIM+) technology shields Septentrio receivers from interference. On a highway, an increasing number of trucks are equipped with illegal jamming devices to avoid road tolling. These jamming devices can interfere with GPS signals used by other vehicles and infrastructure.
Smart Highway is a project of the Flemish government coordinated by imec, a world-renowned research and innovation hub of nano-electronics and digital technology. Septentrio, Toyota, Ericsson and Telenet are contributing industry partners for the project, while UAntwerpen, UGent and others are research partners.
On the European level, the CONCORDA project supports research and development of automated vehicle technology and infrastructure in Germany, Spain, France, Netherlands and Belgium.
Autotalks, a V2X (vehicle-to-everything) communication company, is gaining momentum in the Chinese market following the successful completion of the C-V2X field test with a Chinese technology giant.
The field trial evidenced Autotalks’ C-V2X capabilities on a public road, including 3GPP release 15 compliant transmit diversity, and remarkable communication range of over 2 kilometers with a nominal range of over 1.5 kilometers.
As part of its momentum in China, Autotalks is growing its Chinese partner ecosystem and hiring for its operation in this giant market. Autotalks is a member of IMT-2020, CAICV and China ITS Industry Alliance, working on standardization and testing of C-V2X towards mass deployment. The company has also launched a Chinese website.
China is a fast-growing region in the automotive and intelligent transportation systems (ITS) segments. LTE-V2X technology has been gaining strong momentum in China. In November 2018, Autotalks announced that it has recruited Xiaobing Yang, to lead Autotalks’ business development efforts in China out of Autotalks’ new branch in Beijing. Yang brings to Autotalks more than 25 years of experience in the Chinese telecom industry.
In 2018, Autotalks launched a global V2X solution supporting both DSRC and LTE-V2X (also known as C-V2X) based on its second-generation mature chipset with the intention of expanding its global footprint into China. Autotalks’ LTE-V2X direct communications (PC5) solution is separated from the cellular Network Access Device (NAD), resulting in a secure and cost-effective standalone LTE-V2X solution.
Autotalks announced in February that it has partnered with MediaTek. a global fabless semiconductor company that enables 1.5 billion connected devices a year. The two companies are cooperating on integrating V2X and telematics and have completed a joint reference design for Telematics Control Unit (TCU) integrated with a global V2X chipset.
The reference design is based on Autotalks’ global V2X chipset and MediaTek’s newest technology, an automotive-grade cellular modem SoC, enabling a secure, robust and cost-effective global TCU architecture.
A European Union project has designed and prototyped the ESCAPE GNSS Engine (EGE), a positioning module intended to enable autonomous or semi-autonomous driving functions.
Automated vehicles are on the way, and the European GNSS Agency (GSA) sees satellite navigation as a core technology that will help to ensure their safe operation. At the recent Mobile World Congress in Barcelona, the GSA shared its space with the ESCAPE project, an EU-funded initiative that has developed a unique positioning module for autonomous or semi-autonomous driving.
Autonomous vehicles will feature both sensor-based and connection-based solutions for a variety of vehicle services. Ultimately, the GSA sees a “converged solution” as the best alternative, combining the strengths of both approaches. By integrating sensor data and connectivity-based information, operators can reduce the need for the most expensive sensors and at the same time save money on infrastructure.
The Fundamental Elements-funded ESCAPE project has designed and prototyped the ESCAPE GNSS Engine. It is a unique positioning module that combines precision GNSS and 4G connectivity, for the highly accurate and reliable positioning capabilities required to make automated driving a reality.
The ESCAPE GNSS Engine. (Photo: GSA)
“This is an onboard unit for autonomous vehicles,” said Jessica Garcia Soriano, R&D engineer of the Advanced Communications Business Unit at Ficosa. “It is equipped with a very good GNSS receiver made by STMicroelectronics. This was actually the first dual-frequency GNSS receiver made for the automotive market.”
Dual-frequency is of course a real differentiator for Galileo, as the world’s leading provider of dual-frequency GNSS signals. This means added precision and robustness and it helps enormously with multi-phase errors and other urban canyon issues in city-driving scenarios.
“We also have a very good positioning solution provided by GMV, another Spanish company. They are experts in these kinds of solutions. The outputs from this solution are very accurate. So we have GNSS of course, including Galileo, and apart from this you have a modem inside, a 4G modem that gets GNSS corrections from the internet, so this helps to provide better positioning. And apart from this you have inside the same module an inertial measurement unit [IMU]. This is a sensor, a device that senses acceleration and has a gyroscope, so this information also helps in providing good positioning.”
The ESCAPE unit also provides for the integration of other data from the vehicle. “That means vehicle odometry, for instance, you can have camera information, or information from maps that are stored in the vehicle, among others” Garcia said.
The market is ready
“One of our important goals is to provide a low-cost system,” Garcia said. “There are other very good positioning systems that are being developed that can be based on some very advanced technologies, such as LiDAR for instance, but this is very expensive. So our target is to develop and build a prototype of a system that could be installed in all vehicles, for the whole market. And so we are combining GNSS, 4G, IMU and all of these other data sources from the vehicle in an intelligent way, in an affordable way.”
Indeed, one of the things that make ESCAPE unique is the way it brings together high-end GNSS processing capabilities with an industrialisation process that targets high volumes and comparatively limited cost and size. It also encompasses hardware and software safety procedures required for certification for the automotive market.
Garcia explained, “At Ficosa, we are a top-tier global provider devoted to the research, development, manufacturing of vision, safety, connectivity and efficiency systems for the automotive sector. We provide solutions directly to vehicle manufacturers. Based on our expertise and thanks to the work we have done on this project, we understand very well that GNSS is a central focus for a lot of applications. From the moment we started working on this project, at Ficosa we realised that this is a new and very important market. Right now we are working on a positioning system for autonomous driving based on this unit. This is part of our roadmap at the moment. This is a positioning system that we are ready to offer to the customer.”
The unit is ready now, but we have yet to see autonomous cars in large numbers on the road. Is this a problem for the ESCAPE system? Garcia answered, “From the very first moment that you have an autonomous car in the street, you will need high-accuracy positioning, because these vehicles will need this positioning to maintain themselves safely on the road. But we don’t have to wait for autonomous cars. The vehicles on the road today can already benefit from this technology.”
Garcia pointed to Europe’s eCall system, where a call centre automatically receives location information from vehicles in distress, thanks to on-board GNSS. “You already have this emergency call technology in the vehicles,” Garcia said, “and it provides a location, so the better the location is, the easier it is to locate the people in an emergency situation. No, we don’t have to wait.”
Location and more
One thing everyone seems to agree on is that autonomous vehicles will soon be appearing on European road networks, and most driving-related decisions will be based, one way or another, on the location of the vehicle and of other vehicles and objects in its vicinity. So vehicle location and positioning will be a critical component for the effective transportation of people and goods by self-driving road vehicles. That positioning will be enabled mainly by GNSS technologies, including Europe’s Galileo, which is expected to offer significant benefits in terms of accuracy and authentication compared to the other satellite-based navigation systems.
GNSS-based location will have to be complemented by other technologies in order to get to the integrity level needed in all driving situations, but the GSA also believes the combination of dual-frequency GNSS and 4G/5G connectivity can do more than just navigation, enabling as well a diverse range of in-vehicle location-based services (LBS), much like what we see emerging in smartphones. The EU-funded ESCAPE project, with its innovative GNSS engine, represents an important step forward in the pursuit of accurate, reliable and affordable positioning and connectivity for the emerging autonomous and connected cars markets.
Inertial 2019, the sixth annual Institute of Electrical and Electronics Engineers (IEEE) International Symposium on Inertial Sensors and Systems, took place in Florida earlier this month. Events of particular note included two keynote talks from experts at the U.S. Defense Advanced Research Projects Agency (DARPA) and the Air Force Institute of Technology (AFIT), and a technical paper on the “Design and Performance of Wheel-mounted MEMS Inertial Measurement Unit (IMU) for Vehicular Navigation.”
Miniature Sensors. Ronald Polcawich from DARPA addressed “Miniature Navigation Grade Inertial Sensors: Status and Outlook.” The agency’s Precise Robust Inertial Guidance for Munitions (PRIGM) program has focused for more than three years on developing inertial sensor technologies to enable PNT in GPS-denied environments. PRIGM has developed a navigation-grade inertial measurement unit (NGIMU) based on micro-electromechanical systems (MEMS) platforms. The device has a mechanical/electronic interface compatible with drop-in replacement for existing tactical-grade IMUs on legacy U.S. Department of Defense (DoD) platforms.
PRIGM’s second main area of interest is advanced inertial micro sensor (AIMS) technologies for future gun-hard, high-bandwidth, high-dynamic-range, GPS-free navigation. It explores alternative technologies and modalities for inertial sensing, including photonic and MEMS-photonic integration, as well as novel architectures and materials systems.
Map-Matching. Aaron Canciani from AFIT educated the many computer scientists, software developers, information technology professionals, physicists and electrical and electronics engineering attendees on “The Importance of INS Accuracy for Map-Matching Navigation.”
The GPS-alternative technique matches measurements from a sensor to a map to provide navigation information. With repeatable measurements, almost any map may be used to navigate. Common maps used for navigation include terrain height, gravity, magnetic fields, Wi-Fi RSS and more. The inertial navigation system often plays a critical role in the accuracy of these methods, and increased INS accuracy plays a synergistic role in an overall map-matching navigation system.
WHEEL-MOUNTED IMUS
In today’s automobiles, MEMS gyroscopes and accelerometers provide essential measurements for enhancing stability and control. Both types of sensors have significant noise at low frequencies, limiting the measurement accuracy, particularly in low-dynamic conditions. Further, uncompensated accelerometer tilt causes large bias to acceleration estimates. For gyroscopes, physical rotation of the sensor can remove the constant part of the gyro errors and reduce low-frequency noise. In ground vehicles, such rotation occurs conveniently in wheels.
When inertial sensors are attached to the wheel, both types of sensors provide information on the rotation, gyroscopes naturally and accelerometers via specific force measurement. As a result of carouseling, accurate wheel heading, roll and pitch estimation can be estimated with high resolution, and the result is nearly bias-free. Combining the wheel orientation to distance traveled via known radius enables classic dead-reckoning mechanization (assuming zero slip) and other vehicle dynamics monitoring systems (considering wheel slip as unknown to be solved).
Authors Jussi Collin of JC Inertial Oy, Finland, and Oleg Mezentsev, Pacific Inertial Systems Inc., Canada, provided details of wheel-mounted inertial system hardware and algorithms and showed test results for several system configurations and applications. They discussed future system improvements — in particular, system miniaturization and an energy-harvesting development progress for next-generation inertial systems.
They have designed a wheel-mountable sensor system that contains MEMS sensors, battery, Bluetooth module and electronics to run computations and navigation algorithms on board. It operates in several programmable modes:
Computes navigation parameters real time and sends them via Bluetooth to an onboard computer (can be any other integrated system, data logger or a tablet).
Sends real-time raw data to an onboard computer.
Records high-rate raw sensor data (up to 2 kHz) to an embedded micro-SD card.
The onboard computer is a MEMS-array IMU with 48 gyro and accelerometer channels, with a BT receiving and sync controller, data storage and Wi-Fi interface. They can connect up to four such units to one onboard computer and have all their data in sync with the in-cabin inertial data. All of this data can be used for navigation, wheel dynamics measurements or road quality monitoring applications.
A series of documentary videos on automation and technology in the construction and agriculture industries covers drone inspection of infrastructure among other new trends. Filmed in the U.S., the Netherlands, United Kingdom, and Germany, the series of brief films produced by Topcon Positioning Group emphasizes how technological advancements have changed infrastructure — how it is designed, built and maintained — and what to expect going forward.
“The infrastructure industry is changing quickly, and this video series highlights how this advancement is part of a larger story of technology changing the paradigm everywhere. To stay on top, businesses will need to adopt automation and new technology,” according to Topcon spokesperson Jackie Ferreira.
A spokesperson from Intel describes how drone inspection facilitated data gathering and project planning for a complex restoration project on the Great Wall of China, in an area with very difficult access.
NovAtel’s Waypoint Products Group has released version 8.80 of its GNSS and GNSS+INS post-processing software products, including Inertial Explorer, Inertial Explorer Xpress, GrafNav and GrafNet. All Waypoint customers with an active subscription that are within the support period qualify for the Waypoint 8.80 upgrade at no additional charge.
Key features of the 8.80 release include:
High-rate precise satellite orbit and clock corrections available in minutes with the TerraStar-NRT option
Increased accuracy for pedestrian and vehicle applications by applying vehicle constraints using our SPAN intelligent vehicle dynamics modelling
Ability to use L5, E5a, B3 in differential solutions
14 percent faster processing with 64-bit support
For applications requiring highly accurate post-mission position, velocity or attitude, post-processing maximizes the accuracy of the solution by processing previously stored GNSS and inertial measurement unit (IMU) data forward and reverse in time, and combining the results. The position, velocity and attitude solution can be smoothed and output at the required data rate and in the coordinate frame required. This process also provides the ability to assess the solution reliability and accuracy.
The GrafNav and Inertial Explorer software packages are available as a digitally secured machine-portable license. The products are also available as a perpetual license or as a time-limited term license. A Software Development Kit (SDK) is available to allow developers to customize the entire processing workflow to suit their customers or application.
The Waypoint process:
Step 1: Capture raw GNSS and IMU data.
Step 2: Waypoint post-processing software maximizes the accuracy of the solution by independently processing data forward and reverse in time and combining the results.
Step 3: The position, velocity and attitude solution is smoothed to deliver an unparalleled level of accuracy. In-depth quality analysis tools verify the quality of the trajectory.
Step 4: Export your results at the required data rate and in the coordinate frame required.
A year-long project aboard a commercial cargo ship collected tens of thousands of snapshots of radio-frequency interference in the GNSS band on a passage from Spain to Korea and back. Most interference was detected in busy port areas, less interference while transiting along coasts, and while least frequent, interference was still found in the open ocean.
Researchers at the German Aerospace Center (DLR) are still analyzing the vast amount of GNSS disruption data collected during the year-long project. Two papers have already been published about this project, and more are on the way, according to principle researcher Emilio Pérez Marcos.
In a paper presented at the Institute of Navigation last year, Marcos and his co-authors outlined the results of the last five months of this unique sampling experiment. Detection equipment was mounted on a large Hapag-Lloyd container ship. The antenna was mounted about 50 meters above the water line and provided a line-of-sight of 25km or more. The L1/E1 and L5/E5a frequency bands were continuously monitored. In addition to a “Snapshot” recording device used to save raw data samples (time snapshots), a more resilient DLR multi-antenna receiver was used to assess the impact of interferences in beamforming array GNSS receivers (semi-resilient).
As might be expected, the most interference was detected in busy port areas. Less interference was experienced while transiting along coasts. While it was the least frequent, interference was still detected during open ocean transits.
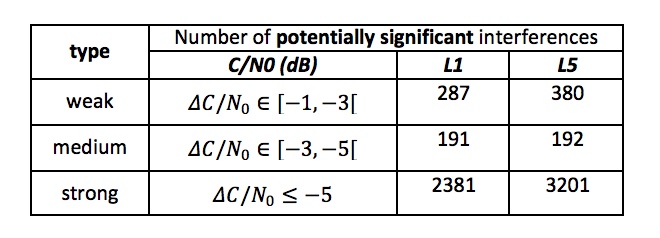
Table: Emilio Pérez Marcos and co-authors
Of the 39,045 snapshots recorded, 6,632 contained radio frequency interference at 1dB or higher. Separate tests have shown that many single antenna GNSS receivers begin to perform poorly with interference signals greater than 1dB. The other 32,413 snapshots could represent interference signals that may have come from weaker transmitters, sources more distant from the ship, been the result of adjacent band transmissions, or other phenomena.
Three particularly strong and persistent interference incidents were noted in the paper.
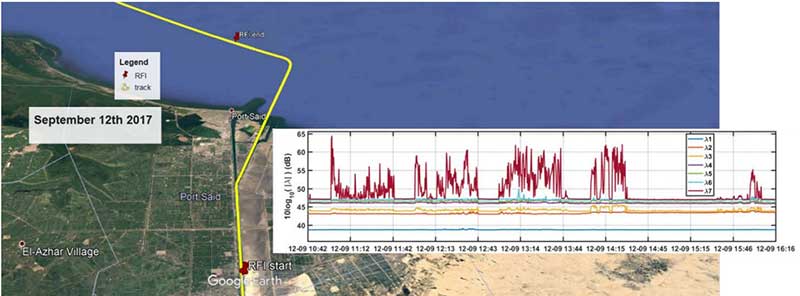
The first was detected when the vessel was transiting the Suez Canal northbound. The interference lasted around five hours and 60km. At several points the interference prevented the DLR semi-resilient GNSS receiver from working properly, which would mean that any single antenna GNSS receiver would cease to function completely.
Vessel going north in Suez Canal. RFI detectable during approx. 60 km. Inset: Eigenvalues during the 5 hours that the RFI was detectable. (Graphic: Emilio Pérez Marcos)
The second caused the DLR receiver to fail when the vessel was entering Jebel Ali, the port of Dubai in the United Arab Emirates. The DLR receiver provided some resilience thanks to its beamforming capabilities; again any other receiver would have suffered the interference effects earlier being unable to provide any PVT. The receiver did not return to proper operation for 11 days and 5,000km. The reason for this is uncertain and under investigation.
Particularly strong interference (45dB) caused the third incident and resulted in the DLR receiver failing for three days. It began when the ship was entered the highly trafficked Malacca Straits.
The equipment used also allowed researchers to determine direction of arrival for the interfering signals and to evaluate whether the interference was a spoofing signal.
For the reported strong interference events, DLR consulted the captain of the ship, who attested and confirmed the loss of PVT in the ship’s own GNSS receiver, with all the consequences that this implies for the systems that rely on it.
The paper, “Interference and Spoofing Detection for GNSS Maritime Applications,” was presented at the ION GNSS+ conference in Miami in September of 2018. It described the last phase of a yearlong measurement effort aboard the ship by DLR. An earlier phase of the campaign has also been published in E. P. Marcos et al., “Interference awareness and characterization for GNSS maritime applications,” 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, 2018.
The authors are preparing additional papers to describe more of the results from the larger project.
A Chinese cargo ship, the Rongda Changsha, equipped with receivers downloading signals from the BeiDou Navigation Satellite System (BDS), arrived at Brunei, on the north coast of the island of Borneo in Southeast Asia, in February after embarking from Luojing Port in Shanghai. This marks the first public successful application of BeiDou terminal products in the South China Sea and unveils China’s ambition to promote BeiDou products in the international marketplace.
The Shanghai-Brunei trip was a trial for not only examining BeiDou-3’s capacity, but for learning the users’ experience and needs. The data collected from the trip has been analyzed and applied for updating and prioritizing the marine navigation system, according to China Aerospace Science and Technology Corporation (CASC), manufacturer of the Beidou receivers on the ship.
It is anticipated that more services will soon arrive, with Internet and voice calls facilitated by the messaging aspect of BDS, for further exploring industrial application scenarios and — importantly for government support of its GNSS — protecting Chinese outbound and inbound routes. The South China Sea is one of the world’s busiest waterways, and oil imports to China from the Middle East are a key strategic component of this traffic activity.
BDS now covers more than 50 countries and more than 3 billion people. BDS-related products have gained access to the markets of more than 70 countries and regions, more than 30 of which are along the (land-based) Belt and (maritime) Road, in line with the Belt and Road Initiative. Through joint applications with other compatible navigation satellite systems, BDS provides global users with diversified choices for better application experience.
“Chinese security interests encompass not only China itself and nearby areas, but also the sea lanes that enable the import of raw materials and export of finished goods,” wrote Scott Pace in GPS World, December 2010. “In recent years, China has shown an increasing interest in ‘maritime domain awareness,’ in which satellite navigation is used for monitoring the transit of ships in the Indian Ocean (for example, oil from the Middle East) and the South China Sea (minerals from Australia, fishing zones). Satellite navigation is a dual-use, commercial and military, interest for China, and this may have prompted support for the more advanced, independent GNSS that would become Beidou-2 or Compass.”
Pace was chosen by the White House to serve as executive secretary of the National Space Council in July 2017. Pace is also director of the Space Policy Institute and Professor of Practice of International Affairs at George Washington University. He serves as a special counselor to the National Space-Based Positioning, Navigation and Timing (PNT) Advisory Board.
STMicroelectronics (ST) and Virscient are collaborating to enable faster delivery of connected-car systems with ST’s Telemaco3P automotive application processors. Virscient offers support to ST customers in the development and delivery of advanced automotive applications based on the ST Modular Telematics Platform (MTP).
STMicroelectronics is a global semiconductor leader serving customers across the spectrum of electronics applications. Virscient is a provider of hardware and software development services and support for customers building automotive solutions using ST’s Telemaco3P secure telematics and connectivity processors.
Virscient’s connected-car systems rely on technologies such as GNSS (precise positioning), LTE/cellular modems, V2X technologies, Wi‑Fi, Bluetooth and Bluetooth Low Energy.
MTP is a comprehensive development and demonstration platform incorporating ST’s Telemaco3P telematics and connectivity microprocessor. MTP enables the rapid prototyping and development of smart-driving applications, including vehicle connectivity to back-end servers, road infrastructure and other vehicles, the companies said.
The Telemaco3P incorporates Dual-Arm Cortex-A7 processors with an embedded hardware security module (HSM), an independent Arm Cortex-M3 subsystem, and a set of connectivity interfaces. With security at its core, and considerable flexibility in both hardware and software configurations, the Telemaco3P provides an excellent platform for connectivity within the vehicular environment.
“We chose to collaborate with Virscient for Telemaco3P-based designs because of their differentiated expertise in the development of embedded systems and wireless technologies, and their proven track record of helping customers take connected products from concept to market,” said Philippe Prats, head of EMEA marketing and application for STMicroelectronics’ automotive and discrete products. “The Telemaco3P platform enables our customers to deliver new categories and products in automotive telematics. By working with Virscient, we make this exciting technology accessible to a broader range of innovative companies.”
Commenting on the collaboration, Dr. Murray Pearson, CEO of Virscient, said, “We’re thrilled to work with STMicroelectronics to enable more companies to deliver innovative and market-leading platforms using the Telemaco3P devices.”
“ST and Telemaco3P are setting the security standard for processor and connectivity solutions in vehicular telematics. By leveraging Virscient’s hardware and software development capabilities, and our considerable experience with embedded wireless and connectivity technologies, Telemaco3P customers can push the envelope, and get their products to market quicker than ever.”
ST and Virscient are exhibiting the Modular Telematics Platform within the ST Automotive Telematics Ecosystem at Embedded World, ST stand (Hall 4A-138), Feb. 26-28, in Nuremberg, Germany.
Rohde & Schwarz has expanded the capabilities of its R&S SMBV100A/B GNSS simulator and R&S CMW500 LTE network simulator to operate with Vector CANoe .Car2x, a software tool for simulation, development and test of V2X-based communication applications.
Image: Rohde & Schwarz
The solution enables engineers to easily verify critical end-to-end safety-related V2X scenarios in a lab environment. It uses the C-V2X software package for the R&S CMW500 to simulate the physical- and MAC-layer, transmitting and receiving data over the simulated PC5 interface. This covers ideal, faded and congested channel conditions to the device under test (DUT). In its current form, the solution supports both GNSS and PSSS/SSSS sidelink synchronization options.
Rohde & Schwarz and Vector have successfully demonstrated its solution, which is designed to configure and run traffic scenarios to comprehensively test the physical layer 3GPP Rel. 14 up to the application layer of C-V2X ECUs in a lab environment.
Rohde & Schwarz is demonstrating the test solution at Mobile World Congress 2019 in Barcelona in hall 6, booth 6C40, Feb. 25-28.
The automotive industry is evolving toward connected and autonomous vehicles that offer many benefits, such as improved safety, less traffic congestion, reduced environmental impact, and lower capital expenditure. With the trend to equip vehicles with 3GPP Release 14 C-V2X ECUs, peer-to-peer data transfer in ad-hoc networks between vehicles will be realized. All vehicles share location, speed and trajectory, enabling warnings regarding on-road dangers to be shared between drivers.
Applications cover use cases such as vehicle-to-vehicle (V2V) communication, data exchange with roadway infrastructure (V2I), and interaction with vulnerable road users such as pedestrians (V2P). Data communication is implemented in the 5.8 GHz and 5.9 GHz intelligent transportation system (ITS) spectrum bands.
Traffic scenarios
CANoe .Car2x offers a range of functions designed to configure and run traffic scenarios. This allows the stimulation of a C-V2X control unit according to a defined traffic situation that tests the implemented application in a structured manner.
The included Car2x Scenario Editor supports the creation of traffic scenarios using a graphical interface. CANoe .Car2x generates the corresponding ITS communication based on the test scenario. The scenario is then played back with the R&S CMW500 providing the radio access layer with the specific physical interface. This verifies data transmission and reception over the PC5 interface so that the functions of the ECU can be tested comprehensively.
The combined solution covers all layers – the complete stack, 3GPP Radio Access Layers for C-V2X Mode 4, region specific ITS protocol layers such as EU ITS-G5 and U.S. WAVE and the ITS application message sets.
This enables testing of specific use cases such as Emergency Electronic Brake Light (EEBL), Left-Turn Assist (LTA) or Intersection Movement Assist (IMA), as well as more complex scenarios with multiple simulated vehicles such as a congested highway.
Additionally, security mechanisms could also be verified running simulations with both valid and invalid signed certificates. On top of this CANoe supports all common automotive bus connectivity such as CAN, LIN, MOST, FlexRay and Automotive Ethernet, enabling the test engineer to analyze or stimulate the ECU within an entire system from their desk.
By extending the solution with the VN4610 interface from Vector, customers can access IEEE 802.11p and CAN (FD) networks as well. This enables users to analyze and test C-V2X and IEEE 802.11p (DSRC) communication and related applications with a single setup and a common user interface.
“C-V2X device testing through the application layer is a significant step towards achieving the goal of having fully connected vehicles to improve road safety,” said Anton Messmer, vice president of Mobile Radio Testers at Rohde & Schwarz. “Our efforts in developing and verifying C-V2X end-to-end application scenarios are enabling user equipment manufacturers and OEMs to reduce the time needed to roll out C-V2X technology on a worldwide basis.”
“CANoe .Car2x has a strong focus on testing V2X based protocols and ADAS applications. This combined solution, CANoe .Car2x with the R&S CMW500, enables our customers to stimulate the V2X ECU with real scenario data in order to perform tests from physical layer up to the application,” said Stefan Krauß, director of Tools for Network and Distribution Systems at Vector. “The collaboration on this solution shows what can be achieved when leading players from the automotive and telecommunication industries work hand in hand.”
By Daniela E. Sánchez, Harvey C. Gómez and Thomas Pany, Institute of Space Technology and Space Applications (ISTA)
This paper presents how our system, consisting of a GNSS receiver antenna, an inertial measurement unit (IMU) and a lidar, is used to obtain high-precision maps through the geo-referencing of lidar point clouds. An accuracy assessment of the system is conducted, which also gives us insights on the quality of lidar range measurements for autonomous driving applications.
The assessment is done by geo-referencing the obtained point clouds of extracted buildings and comparing them against a supporting measuring system like a total station. The building extraction is done by performing an approximation of the mathematical model of a plane to the facades that composes the building in both, the lidar and the supporting measurement system data.
The paper also indicates the proposed pose determination method of a mobile agent using lidar data. Thanks to the advantages of active, 3D sensors, diverse objects in the environment can be detected as individual point sets, or clusters. Each of the segmented objects can be used as a landmark to figure how the agent is located with respect to those structural elements. The algorithm is capable of detecting the clusters in one point cloud, and finding the most alike point set on a subsequent scan. This is achieved by comparing global descriptors for point cloud data.
The Ensemble of Shape Functions (ESF) is selected as the cluster descriptor. The cluster matching is performed by comparing the clusters one-to-one, calculating the minimum Chi-squared distance among their descriptors. The smaller this distance, the greater the probability of being the same cluster in distinct epochs.
Figure 2. Direct geo-referencing of lidar data at different times. (Image: Authors)
The resultant cluster correspondences for the whole point cloud allow finding the rigid transformation between the point clouds. An initial coarse alignment among the clouds based on the centroids of each matched cluster was performed, followed by a fine alignment in order to reduce errors by the use of the Iterative Closest Point (ICP) algorithm. This approach is valid for urban environments, or for those where many objects can be segmented as clusters.
Finally, a practical case is described in order to show how we plan to use the outcome of the highly precise geo-referenced point clouds and the pose estimation method using lidar.
Foxcom, a subsidiary of Global Invacom, has launched a solution that enables aircraft ground engineers to undertake 24/7 avionics testing of Inmarsat, Iridium and GPS satellite signals indoors.
The Hangar Repeater Solution enables engineers involved in maintenance, repair and overhaul (MRO) of aircraft to undertake testing 24/7 regardless of the weather, without having to move aircraft in and out of a hangar, as is the current practice.
The dedicated repeater greatly reduces aircraft-on-ground time, work hours and overall maintenance costs, providing a rapid return on investment.
While Inmarsat and Iridium satellite equipment has been deployed worldwide, its use was limited to outdoor, as building structures block satellite signals. Foxcom’s unique and all-inclusive repeater solution provides communication inside buildings or underground without the need for a direct line of sight to the sky. An existing Foxcom repeater can be easily upgraded to add Inmarsat compatibility.
Beyond the aviation sector, GPS, Inmarsat and Iridium repeaters can be deployed across a range of locations and industries, such as underground civil defence and military bunkers, oil rigs and ships and large buildings.
Foxcom launched its first range of repeaters in 2013. Established in 1993, Foxcom specializes in radio frequency over fiber equipment. It is a top supplier to satellite operators, broadcasters and integrators worldwide, with products that offer high performance, bandwidth and reliability.