Latest inertial navigation system serves new customer requirements in autonomous vehicles, mobile mapping, surveying and more
Photo: Honeywell
Honeywell is introducing the HGuide n380, an inertial navigation system (INS) that communicates position, orientation and velocity of an object — such as an autonomous vehicle or unmanned aerial vehicle (UAV) — even when global navigation satellite signals are unavailable.
Smaller, lighter and lower priced than previous Honeywell inertial navigation systems, the HGuide n380 is built using Honeywell’s rigorous design standards to withstand harsh environments in the air, on land or at sea.
“We recognized a need for a small, high-performance inertial navigation system in areas like 3D mapping, surveying and other applications where space is at a premium and performance cannot be compromised,” said Chris Lund, offering management senior director, Navigation and Sensors, Honeywell Aerospace. “We responded by developing the HGuide n380 inertial navigation system, which provides our customers with proven, cost effective inertial sensor technology, created for aerospace applications, but that can be integrated into almost any architecture.”
The new inertial navigation system is composed of Honeywell’s HGuide i300 inertial measurement unit (IMU), a GNSS receiver and Honeywell’s proprietary sensor-fusion software, which is based on the algorithms used for navigation on millions of aircraft every day.
Inputs from these components are fused together to determine position, orientation and velocity to deliver critical navigation information even in areas where a satellite signal is degraded or altogether unavailable, such as canyons, bridges, tunnels, mountains, parking garages or dense forests.
“As the industry evolves, Honeywell’s HGuide suite of IMUs and navigators will be a key enabler of emerging segments like autonomous vehicles, mobile mapping, precision agriculture, robotics and surveying,” Lund said.
During its development, the new product was placed in extreme environments to test ruggedness and was exposed to extensive factory calibration and compensation procedures that help ensure measurement accuracy and performance.
Honeywell has extensive experience in designing and building high-end inertial sensor and navigation systems and has used that expertise to develop a lower-cost portfolio of HGuide offerings to serve new markets and customer requirements.
To date, Honeywell has delivered more than half a million high-performance inertial sensors to serve as navigation aids on an extensive list of manned and unmanned vehicles, which include many air and spacecraft in use today.
Lidar series paired with professional drone provides multi-platform, high-accuracy 3D laser scanning for geospatial and mapping professionals
CHC Navigation (CHCNAV) has launched the multi-rotor BB4 drone and AlphaUni 300/900/1300 lidar.
Photo: CHCNAV
The combination of the AlphaUni 300/900/1300 lidar and BB4 UAV solutions creates a comprehensive and versatile range for 3D mapping and geospatial data acquisition in land, air and marine applications.
“The purchase of a 3D mobile mapping system is too often constrained to a specific purpose, such as airborne or ground survey,” said George Zhao, CEO of CHCNAV. “A lot of our customers expressed the need to have a professional lidar solution that can be used in different scenarios, offering optimal adaptability to their current and future needs.
“With our AlphaUni series, we are now introducing an innovative response with a multi-platform lidar system that can be used with an aerial or marine drone, on a vehicle or carried as a backpack,” Zhao said. “In addition, the long flight autonomy of our new BB4 UAV allows missions over large areas in a single flight for exceptional productivity.”
AlphaUni lidar series
Photo: CHCNAV
The new AlphaUni series enhances CHCNAV’s Alpha Mobile Mapping family with a light, versatile long-range laser scanner systems available on the high-end market.
The series provides optimized data sets powered by advanced GNSS/inertial navigation system (INS) sensors and long-range Riegl scanners.
AlphaUni’s design adapts to a variety of applications and can be installed on a variety of platforms, including multi-rotor UAV, fixed-wing vertical-takeoff-and-landing (VTOL) UAV, vehicles, rail trolleys, backpacks, boats and more.
BB4 UAV
The BB4 UAV is a high-end multi-rotor drone optimized for the CHCNAV AlphaUni 300/900/1300 lidar series. Its modular design simplifies deployment in just a few minutes.
Its 7-kg payload breaks the capacity barrier, and more than 45 minutes of flight time increases the airborne lidar survey ability.
The redundant CHCNAV and DJI inertial measurement unit (IMU) and GNSS units provide reliable centimeter real-time kinematic (RTK) positioning, meeting the demand for high accuracy in the geospatial and mapping industry.
Professor Tom Scott, from the School of Physics at the University of Bristol, U.K., led a group of researchers from NCNR to conduct surveys on multiple sites of interest, including the Buriakivka village, a settlement abandoned following contamination from the power plant accident, and the “Red Forest,” a natural woodland area located the closest to the reactor.
Working closely with local Ukrainian authorities, the team operated unmanned aerial vehicles (UAVs) — Routescene’s LidarPods flown on DJI M600 hexacopter drones — to perform a series of radiation mapping surveys over the course of 10 days.
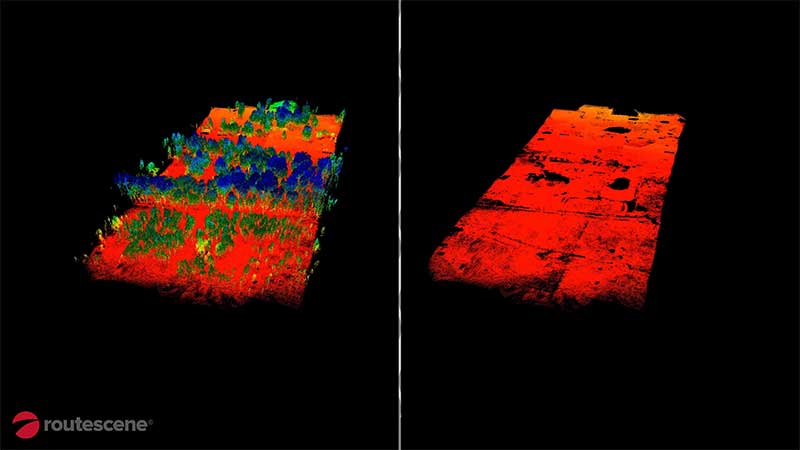
According to Routescene, the point cloud data collected was processing using its LidarViewer Pro software to generate a detailed digital terrain model. It was then overlaid with the results from a gamma spectrometer survey, undertaken to measure radiation intensity, to locate the exact sites of the radiation hotspots.
“The algorithm converts the aerial radiation intensity recorded by a UAV survey into a ground intensity map,” said Kieran Wood, senior research associate at the University of Bristol. “This process is heavily affected by the distance between the airborne radiation sensor and the ground/buildings. Hence, high accuracy lidar-based models were essential.”
Photo: Routescene
Results
While the general widespread radiation contamination in the Red Forest was already known, the results revealed that the radioactivity was unevenly disturbed. Although radiation intensity had reduced in some areas, other areas remain highly contaminated confirming continued danger to anyone accessing those areas, Routescene reported.
In addition, the researchers detected one unexpected hotspot in the ruins of a facility that was used to separate contaminated waste during clean-up efforts immediately after the accident.
This expedition was the first in a series of surveys NCNR will conduct in Ukraine over the next year. The new maps will help officials prevent risks to visitors to the area and the full results will be published soon, Routescene said.
The Library of Congress will celebrate GIS (Geographic Information Science) Day on Nov. 13. GIS Day, which is held during Geography Awareness Week (Nov. 12-18), is an annual, global celebration of GIS and mapping technology. Formally started in 1999, GIS Day aims to provide a forum to promote the benefits of GIS research, demonstrate real-world applications of GIS, and foster open idea sharing and growth in the GIS community.
The 2019 event will include an all-day series of talks on the use of GIS technology and 3D mapping in cultural heritage preservation and disaster response. The discussions will be held from 8:30 a.m. to 3:30 p.m. in LJ-119 on the first floor of the Thomas Jefferson Building, located at 10 First St. SE in Washington, D.C.
The morning session of the event will open with a keynote speech by Sen. John Boozman of Arkansas, co-chair of the Congressional French Caucus focusing on Cultural Heritage Preservation Mapping and Congressional Policy. The morning will also feature takes about the Notre Dame Cathedral fire and the use of GIS and computer vision in disaster response planning and cultural heritage preservation.
The afternoon session will concentrate on on applications of the technology with case studies on historic building and engineering archives in cultural preservation, advanced spatial analysis and 3D mapping of UNESCO World Heritage sites.
There will also be an open house in the Geography and Map Division from 3:30-4:30 p.m.
DT Research has designed a new rugged tablet with 3D imaging that is purpose-built for 3D mapping with a built-in GNSS module.
The DT301X has an Intel RealSense Depth camera that provides real-time 3D imaging combined with dual-frequency GNSS module for real-time mapping and positioning. The digital images are better than high-definition standard, and are suitable for construction building information management (BIM) graphics.
The DT301X rugged tablet is compatible with existing applications with Microsoft Windows 10 IoT Enterprise operating systems for flexible integration, and it brings together the advanced workflow for data capture, accurate positioning and data transmitting.
Key features of the DT301X
Highly durable. IP65 and MIL-STD-810G rated tablet in a slim case offers the versatility to be used in the field, office and vehicles.
Indoor/outdoor display. A high brightness 10.1-inch touchscreen offers flexible viewing in a wide range of lighting.
Wi-Fi and Bluetooth. Long-range Bluetooth for 1000-foot range and 4G LTE mobile broadband for the latest in high-speed communications.
High performance. Intel 8th-generation Core i5 or i7 processor offers high-performance while still being energy efficient.
Hot-swappable batteries. With high-capacity 60- or 90-watt hot-swappable batteries, the DT301X keeps working continuously.
Topcon Positioning Group has released its next-generation flight-planning system for its rotary-wing aerial UAV offering.
The new Intel Mission Control Software is designed to facilitate automated flight planning, managing missions and data handling for the Intel Falcon 8+ drone – Topcon Edition and its available payload options.
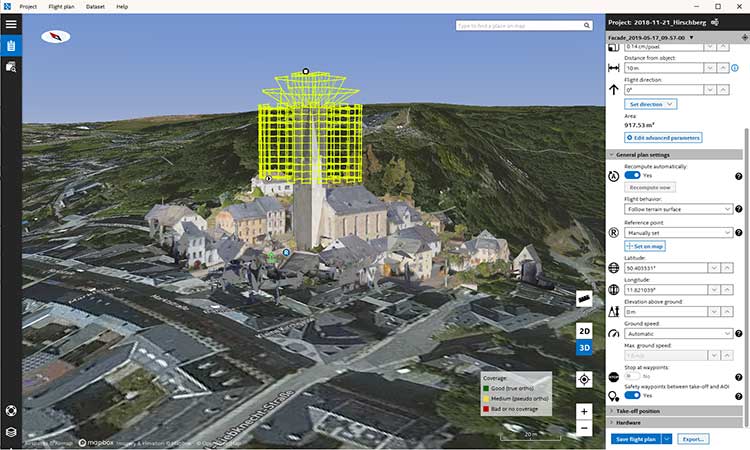
The software is designed to increase accuracy with advanced mapping features that allow operators to easily set project parameters and prepare missions using presets for 2D areas such as polygon, corridor and city grid, as well as 3D structures like towers, buildings and facades.
“Operators can take advantage of 2D and 3D map views with the ability to import more precise project details and parameters, including restricted airspace, and support to adapt flight planning over difficult terrain,” said Charles Rihner, vice president of planning for Topcon Emerging Business.
“It features the ability to import elevation, KML, GeoTIFF and Shapefiles for real life visualizations targeted for accurate planning. Plus, expanded preset options support automated flight including circle of interest, panorama, and 2D and 3D missions with automatic elevation and terrain adoption,” Rihner said.
Additionally, the software includes automatic pre-flight safety and system checks while in mission planning. “Operators will receive detailed communication such as estimated battery life, airspace integration, ground and object safety limits, maximum dive and climb rate, minimum and maximum altitude, camera speed, number of images, camera storage, GSD check, and target photo coverage and quality,” Rihner said.
The flight-planning software is also designed to improve data handling and export to support easier data processing.
“It includes automated image matching and geotagging of images during data import, for increased time saving. Operators can preview and inspect the quality of the collected data, including individual images, as well as an overview of data coverage. Then, they can quickly and easily access and export flight data, and filter datasets for easier processing,” Rihner said.
Phase One Industrial has expanded its RS and RSM lens offering with three new high performance lenses for high-altitude aerial photography and long-range aerial and ground inspection applications.
The 300mm AF, 180mm, and 150mm MK II lenses are designed to enhance the performance and flexibility of Phase One Industrial’s iXM-RS and iXM aerial camera series. Each offers precision imagery, taking advantage of the cameras’ ultra-high resolution backside-illuminated (BSI) CMOS sensors, to maintain a smaller ground sample distance (GSD) while flying at higher altitudes, the company said.
Phase One RSM 300mmAF. With the longest focal length in the line-up, this lens offers a 5 cm GSD from 13,000 feet. It fits both iXM and iXM-RS camera models and produces superb image quality by enhancing the cameras’ ultra-high resolution BSI CMOS sensors (3.76 µm pixels).
The lens is designed for both high-altitude 2D and 3D mapping and long-range ground inspection. The motorized lens offers a focus range of 10 m to infinity within which a predefined distance can be set remotely. A self-locking mechanism is built in to secure the focus position against vibrations.
5 cm GSD from 13,000 feet
10 m to infinity focusing range
f/8 – f/32 aperture range
1/2000 sec exposure time
RS Shutter reliability – 500,000 actuations
Rodenstock RS 180mm. Specified by Phase One and built by Rodenstock Photo Optics, Germany, this lens reaches a 5 cm GSD from 8,000 feet when used with the iXM-RS150F camera. The lens supports the camera’s ultra-high resolution BSI sensor for greater image quality and is integrated with a Phase One RS reliance shutter for speed and reliability. The RS 180mm enhances high-altitude aerial 2D and 3D mapping and improves efficiency in oblique configurations.
5 cm GSD from 8,000 feet
f/6.3 – f/22 aperture range
1/2000 sec exposure time
RS Shutter reliability – 500,000 actuations
Phase One RS 150mm MK II. A 5 cm GSD from 6,500 feet is achievable with the RS 150mm MK II lens. It complements the iXM-RS150F camera’s ultra-high 150-megapixel resolution BSI CMOS sensor for acquiring quality images for high-altitude aerial 2D and 3D mapping.
5 cm GSD from 6,500 feet
f/5.6 – f/22 aperture range
1/2500 sec exposure time
RS Shutter reliability – 500,000 actuations
Every Phase One Industrial lens is rigidly built for robustness against vibrations and shocks to meet RTCA DO160G standards, and is individually tested for performance and high-modulation across the whole image area.
DARPA has issued a Request for Information (RFI) to augment its understanding of state-of-the-art technologies for 3D mapping and surveying. (Photo: DARPA)
Request for Information pursues state-of-the-art technologies for collecting and characterizing 3D mapping and surveying data.
DARPA is seeking information on state-of-the-art technologies and methodologies for advanced mapping and surveying in support of the agency’s Subterranean (SubT) Challenge.
Georeferenced data — geographic coordinates tied to a map or image — could significantly improve the speed and accuracy of warfighters in time-sensitive active combat operations and disaster-related missions in the subterranean domain. Today, the majority of the underground environments are uncharted or inadequately mapped, including human-made tunnels, underground infrastructure, and natural cave networks.
Through the Request for Information, DARPA is looking for innovative technologies to collect highly accurate and reproducible ground-truth data for subterranean environments, which would potentially disrupt and positively leverage the subterranean domain without prohibitive cost and with less risk to human lives. These innovative technologies will allow for exploring and exploiting these dark and dirty environments that are too dangerous to deploy humans.
“What makes subterranean areas challenging for precision mapping and surveying — such as lack of GPS, constrained passages, dark or dust-filled air — is similar to what inhibits safe and speedy underground operations for our warfighters,” said Timothy Chung, program manager in DARPA’s Tactical Technology Office (TTO). “Building an accurate three-dimensional picture is a key enabler to rapidly and remotely exploring and searching subterranean spaces.”
DARPA is looking for commercial products, software, and services available to enable high-fidelity, 3D mapping and surveying of underground environments. Of interest are available technologies that offer high accuracy and high resolution, with the ability to provide precise and reproducible survey points without reliance on substantial infrastructure (such as access to global fixes underground).
Additionally, relevant software should also allow for generated data products to be easily manipulated, annotated, and rendered into 3D mesh objects for importing into simulation and game engine environments.
DARPA may select proposers to demonstrate their technologies or methods to determine feasibility of capabilities for potential use in the SubT Challenge in generating and sharing 3D datasets of underground environments.
Such accurately georeferenced data may aid in scoring the SubT competitors’ performance in identifying and reporting the location of artifacts placed within the course. In addition, renderings from these data may provide DARPA with additional visualization assets to showcase competition activities in real-time and post-production.
Kinematic Ground Control point for UAV photogrammetry: A dynamic duo of UAV and mobile van combine to deliver the accuracy of conventional methods with only 2+2 ground control points at the ends of the corridor.
By Ismael Colomina, Pere Molina and Roberto da Silva Ruy
A Brazilian and a Spanish company, ENGEMAP and GeoNumerics respectively, have finalized the accuracy evaluation of a mission conducted with the latter’s mapKITE technology on a Brazilian motorway in 2018.
The goal of the evaluation was to confirm the advantages of the mapKITE method and its kinematic ground control point (KGCP) concept over conventional corridor mapping methods.
The mapKITE and the conventional method delivered comparable accuracy results — the difference being that the latter requires a dense set of surveyed ground control points (GCPs) while mapKITE does the job with almost no GCPs.
For this purpose, a 4-kilometer segment of the Rodovia Raposo Tavares in São Paulo state was populated with a set of 37 evenly distributed, signalized, accurately surveyed ground points. The set was divided into two subsets of 23 GCPs and 14 ground check points (GChPs) — the ground truth — respectively. The 4-km road segment was also covered by 189 drone images and their corresponding 189 KGCPs. The image set was processed as a conventional aerial corridor block:
with the integrated sensor orientation (ISO) method in a 23 GCP + 14 GChP configuration, and
as a mapKITE aerial corridor block in a 4 GCP + 14 GChP + 189 KGCP configuration.
The two processes produced similar accuracy results: mean (μ), empirical standard deviation (σ) and root mean square (rms) error of the photogrammetric determination of the horizontal (EN) and vertical (h) coordinates of the GChPs against the ground truth. (All units are stated in millimeters.)
The mapKITE configuration uses only four GCPs (two at each end of the road segment) in contrast to the 23 GCPs of the conventional method. Nominal flying height of the drone was 120 meters above ground, producing an average ground sampling distance (GSD) of 2.3 cm. Forward image overlap was 80% resulting in a base-to-height ratio of 0.157.
MapKITE is a GeoNumerics patented method for 3-dimensional corridor mapping that combines the two latest geodata acquisition methods, terrestrial mobile mapping and aerial drone-based mapping. MapKITE is a tandem terrestrial-aerial mapping method and system composed of:
a terrestrial mobile mapping system (land vehicle and sensors) carrying
an optical metric target on its roof;
a drone aerial mapping system; and
a real-time virtual tether and post-mission software.
In a mapKITE mission, the drone follows the land vehicle, and thus the vehicle target becomes a kinematic ground control point visible and measurable on each image. It is a high-accuracy, high-resolution Earth observation method. MapKITE combines the advantages of mobile land-based encompassing images and 3D point clouds. MapKITE combines the advantages of mobile land-based (manned) and aerial drone (unmanned) mapping systems.
GeoNumerics (Castelldefels, Spain) is a research and development company specializing in geomatics and accurate navigation.
ENGEMAP (Assis, Sao Paolo, Brazil) is one of the largest and oldest mapping companies in Brazil. It has more than 100 employees, three aircraft, two mapping land vehicles, a number of rotary- and fixed-wing drones and a record of accomplished mapping and cadastral projects. ENGEMAP is officially authorized by the Brazilian Ministry of Defence (MD) and the Brazilian Department of Airspace Control (DECEA) to conduct mapKITE commercial flights in Brazil.
MANUFACTURERS
The mapKite campaign was conducted with a Sensormap SMM terrestrial mobile mapping system and a UAVision UX Spyro drone equipped with a NovAtel OEM2 GNSS dual-frequency receiver with a Maxtena antenna and a Sony α7R camera with a 25-mm camera constant lens. The INS/GNSS system in the Terrestrial Vehicle was a Span-CPT (Novatel) including dual-frequency antenna and DMI wheel sensor.
ISMAEL COLOMINA is chief executive and chief scientist at GeoNumerics. He has a Ph.D. in mathematics from the University of Barcelona.
PERE MOLINA is advanced applications program manager at GeoNumerics. He holds a master’s degree in mathematics from the University of Barcelona and a master’s in photogrammetry and remote sensing from the Institute of Geomatics, Catalonia.
ROBERTO DA SILVA RUY is technical manager at ENGEMAP. He has a Ph.D. from the Universidade Estadual Paulista.
Representatives from the global automotive industry gathered at the the Intelligent Transport Systems (ITS) World Congress in Copenhagen in September. At a “Galileo for Mobility” session, panelists showed off new products and discussed the benefits of GNSS for the deployment of multimodality, new mobility services and digital platforms by transport authorities, industries and users.
Their goal: to make safe driverless road transport a reality.
Autonomous driving with multi-GNSS
Cover image of Galileo for Mobility leaflet. (Image: GSA)
Germany’s ANavS GmbH provides position and attitude solutions with centimetre-level accuracy. Fast fixing is achieved by using three GNSS constellations and the company’s patented RTK fixing technology. The system combines multi-GNSS (GPS + GLONASS + Galileo), inertial sensors, vehicle data, visual odometry and feature mapping, as well as LiDAR and radar. Tight coupling of GNSS and all of these other systems ensure reliable positioning even in areas with limited satellite visibility.
ANavS managing director Patrick Henkel said, “Our sensor fusion framework delivers precise position and attitude information for navigation. It also generates real-time, highly accurate maps with high resolution. The platform can be used for the whole range of transport applications from road transport to maritime and drone navigation, as well as in robotics, surveying applications and of course in agriculture for precision farming.”
The system is particularly well suited to autonomous driving applications because of its high accuracy, high availability and continuity, and, with Galileo, its integrity, according to Henkel. The ANavS module is available in different versions, with one, two or three integrated GNSS receivers, depending on the level of performance required.
Sensor fusion with non-connected vehicles
Swedish truck manufacturer Scania led work on the EU-funded project, Precise and Robust Positioning for Automated Road Transports (PRoPART), demonstrating a high-availability positioning solution for connected automated driving applications. The system implements sensor fusion using information from both the on-board vehicle sensors and an off-board road infrastructure traffic sensor, accounting also for non-automated and non-connected road vehicles.
“We are benefiting from the high multipath mitigation enabled by the Galileo binary offset code, and there is a substantial improvement of reliability of the carrier phase ambiguity resolution,” said senior engineer Fredrik Hoxell. “All of this makes Galileo a really good addition to our sensor platform,” he said.
Big data contribution
Digital mapping is of course a critical resource for autonomous driving applications, and Tom Jensen of the veteran manufacturer of personal navigation devices TomTom stated “We have been compiling data from our GNSS receiver users for 10 years. We have 500 million devices currently running and today we have about 90 trillion data points!”
TomTom has dedicated itself to fusing that data for the generation of detailed maps that can be updated within minutes, for understanding traffic flow and traffic changes in near real time. “Now we want to open that up for the users,” he said. “We are meeting with public authorities, governments, decision makers who we know can use this information, for the roads, for the infrastructure, to plan their projects in the best and most intelligent way.”
Preventing terrorist attacks
The H2020-funded TransSec project coordinated by Daimler AG Trucks targets a solution to the recent rise in vehicle-based terror attacks across Europe, often employing heavy trucks to attack pedestrians.
Oihana Otaeguim, head of ITS at TransSec project partner Vicomtech, said, “We are developing and evaluating autonomous systems to detect and prevent trucks from being misused, to prevent these incidents from occurring. The trustability provided by Galileo is very remarkable. We have achieved advances in GNSS positioning, map data and map matching. On-board environment sensors and V2X communication are all combined in a local dynamic map. This can then be used for movement monitoring, critical area alarm, pre-crash object detection and for the implementation of non-defeatable emergency manoeuvres.”
The project team is also concerned with developing new and more effective methods to combat GNSS jamming and spoofing, which represent further threats to security in the context of automated driving technologies. Here, Galileo’s unique authentication feature will play an important role.
3D mapping
Japan’s Strategic Innovation Promotion Program, Automated Driving for Universal Services (SIP-adus) conducts several activities previewing the next generation of road transport systems: the human-machine interface in for autonomous and semi-autonomous driving, and the application of automated driving technologies in buses. The goal is precise stopping at bus stops with almost no space between the bus and the curb, to facilitate boarding and exiting for wheelchair users and elderly passengers.
“The project is validating the specifications and accuracy of a high-accuracy 3D mapping function,” Satoru Nakajo of the University of Tokyo said, “including data updating and distribution systems, and of the critical linkage of dynamic data delivered via road infrastructure.”
Public transport on demand. Area Metropolitana de Barcelona (AMB) will replace an existing fixed bus line with low demand with a flexible service that adapts bus routes according to the actual demand, improving the service and engaging new users without increasing public expenditure. The Galileo-based technology platform will consist of a mobile app and a system that manages requests, confirmations and cancellations, finds the best routes, and monitors distances travelled and payments.
Shared taxis. The pilot aims to alleviate Thessaloniki’s city centre congestion by reducing the number of trips from two eastern suburbs to the city. Ride sharing will be offered to commuters through 20 taxis provided by Taxiway at a flat rate.
Service aggregator. The Mobility as a Service (MaaS) app gathers mobility services available in Barcelona, Madrid and other big cities in Spain. It includes public transport, sharing services by motorbikes, bikes and cars, and bike parkings in these cities, improving accuracy and availability in urban areas, enabling a fast and smooth transition between transport modes, and offering the user a door-to-door and seamless multimodal trip experience.
Campus shuttle. The pilot will link autonomous electric vehicles to major hubs in a university or hospital campus (location to be determined).
Vehicle sharing. The Clem’ project will operate a last-mile transportation service to the community in Plateau de Saclay, an urban campus under development in the suburbs of Paris designed to welcome 85,000 students, workers and inhabitants by 2025. The pilot will include sharing a mixed fleet of 10 geolocated electric cars and 20 electric bikes.
This account drew heavily from published reports by the European GNSS Agency (GSA), available in full here.
The technological underpinning for stock markets’ techno-darlings doesn’t always work perfectly. That problem produces lost revenue and lost value. So Uber, for one, has done something about it, partly based on research developed by Paul Groves at University College London and featured in the February 2012 cover story of GPS World.
Smartphones finding each other in the urban landscape constitute Uber’s business basis. When driver and rider can’t find each other, because they’re on opposite sides of the street or even opposite sides of the block, a ride can’t happen. In the GPS world, we call this multipath, reflected signals, shadowing or simply urban canyon. In Uber parlance it is “wasted supply.”
To eradicate it, Uber acquired Shadow Maps in 2016 and has integrated the company’s technology into the Uber app. Beta testing now goes on in 15 cities; early results indicate that positioning accuracy has improved twofold.
The Shadow Maps process, derived from Groves’ shadow-matching concept, directs the Uber algorithm to examine a 3D rendering of the cityscape and perform a probabilistic estimate of user location based on — simultaneously — which satellites are in direct line-of-sight and which aren’t, in conjunction with predicted satellite location, or almanac.
The process uses ray tracing, color-coding satellite signals by strength to predict likely locations. Each probability calculation takes 20–100 milliseconds, and can run every four seconds for riders and more frequently for drivers, according to Uber engineers and former Shadow Maps principals Andrew Irish and Danny Iland.
“You just want to have a better, tighter estimate to account for how much faster cars move,” Irish said.
Prior Work. Paul Groves has researched this area for nearly a decade at the Space Geodesy and Navigation Laboratory, University College London, where he is an associate professor. Lei Wang won ION’s Parkinson Award for his Ph.D. thesis on shadow matching and now works at Apple. Marek Ziebart is a professor and vice-dean, research, UCL.
“There are many different approaches to 3D-mapping-aided GNSS and several different research groups around the world working on them,” said Groves. “At UCL, we have been integrating shadow matching with 3D-mapping-aided GNSS ranging algorithms. We now have a real-time demo system running on an Android smartphone, albeit limited to Central London. By making full use of the new Android ‘raw measurements’ capability, we get around a factor of 5 accuracy improvement over conventional single-epoch GNSS in dense urban areas.”
“It’s great to see people actually making use of our research rather than it just languishing in research papers. The more widely that shadow matching and other 3D-mapping-aided GNSS techniques are used, the better.”
In February 2012, Groves and his co-authors presciently wrote:
“A practical shadow-matching algorithm must be implementable in real time on a mobile device. Three models may be considered.
A network-based solution, whereby GNSS measurements are transmitted to a server, which stores the building boundary data, computes a solution and then sends it to the user.
A handset-based solution, where the shadow-matching algorithm is run on the handset, which also stores the building boundary data.
A hybrid model, whereby the shadow-matching algorithm runs on the handset, but the building boundary data is streamed from a server as and when required.
“Using stored or streamed building boundaries, fewer than 50 comparison and addition operations are required to calculate an overall shadow-matching score for one candidate position with two GNSS constellations. Therefore, shadow matching may be performed in real time on a mobile device with several hundred candidate positions, where necessary.”
The magazine article was based on a presentation at the European Navigation Conference 2011 in London. The authors will present their latest research, reflecting significant progress over the last seven years, at ION GNSS+ 2018 in Miami, Sept. 24-28.
Delair, a supplier of drone solutions for commercial industries, has introduced the next-generation of its high-performance DT26X Lidar UAV.
The DT26X is a long-range fixed-wing drone that combines highly accurate lidar sensing capabilities with an integrated high-resolution RGB (red, green, blue) camera, dramatically increasing the precision, efficiency and cost effectiveness of surveying and 3D mapping.
The Delair DT26X lidar drone combines lidar sensing with RGB camera data to enable highly accurate and high-resolution 3D representation and measurement over large areas with minimal flights and in challenging environments. (Image: Delair)
Details of the new model, which builds on Delair’s proven expertise in long distance, beyond visual line of sight UAV operations, were revealed at the International Lidar Mapping Forum in Denver.
Aerial-based lidar allows for extremely detailed and accurate collection of elevation data of the ground, even in large and vegetated areas, but is typically performed with specialized, single function platforms or expensive manned aircraft surveys with long lead times.
Camera-enabled drones offer a complementary solution for collecting imagery that can augment the lidar-based models. Most projects therefore require multiple mapping flights and separate UAVs, with initial missions using lidar sensors and subsequent flights equipped with RGB-cameras to enhance the digital rendering.
The Delair DT26X lidar’s combined payload of a lightweight sensor and integrated camera allows the acquisition of lidar and photogrammetry data in a single flight, which drastically reduces cost and immediately provides an extremely detailed digital model of the inspected assets.
The lidar sensor is specifically designed for UAV use, adding little weight or bulk to the Delair frame. The fully-integrated smart RGB camera enables real-time camera sensor control and in-flight photo review with automated quality checks.
The new platform delivers increased accuracy in 3D mapping and modeling of terrain and corridors in challenging physical environments (e.g. mountainous, inaccessible by road or foot, dense vegetation) and with difficult visibility, lighting or weighting conditions.
Its long range flying capabilities — allowing coverage of up to 2,400 square acres, communication range of 30 kilometers and 100 minutes of flight time — improve the efficiency of aerial mapping operations over large areas. As a result, the Delair DT26X lidar is well suited for uses such as environmental and land surveys, forestry monitoring, infrastructure surveillance, powerline and pipeline inspections, and road and rail construction.
“The combination of a sophisticated lidar sensor and an industrial grade RGB camera removes the ‘either/or’ decision of choosing between lidar and imagery data acquisition for geospatial professionals,” said Chase Fly, geospatial product manager at Delair. “This is the most versatile and cost-effective UAV solution for large area, long range mapping and surveying where accuracy and detail are required. It provides the precision and visibility required by the most demanding use cases and allows data acquisition and advanced digitization not possible through terrain-based or satellite 3D mapping techniques, or with limited short-range UAVs. With this configuration, users can acquire all the data required for a colorized point cloud from a single flight, which eases the point cloud classification process back in the office, saving significant time and money.”
New lidar sensor for more accurate mapping. TheDelair DT26X lidar fixed-wing UAV incorporates the new RIEGL miniVUX-1DL lidar sensor, a specially designed device for the needs of UAV use.
The small form factor sensor includes a downward looking and optimized field of view specifically geared for corridor mapping tasks. The wedge prism scanner construction produces a field of view of 46 degrees, and the circular scan pattern provides a very high point density and point distribution.
It offers a high scan speed of up to 150 scans per second and a measurement rate of up to 100,000 measurements per second. It is effective in penetrating poor lighting conditions or dense foliage. The lidar sensor makes use of RIEGL’s Waveform-lidar technology, allowing echo digitization and online waveform processing. It supports multiple-target resolution of up to five target echoes per laser shot.
“The new Delair UAV is typically the type of drone RIEGL had in mind when designing the RIEGL miniVUX-1DL, and represents another step toward completing our UAV lidar equipment product portfolio. The scanner’s specific wedge prism scanning mechanism generates a circular scan pattern, resulting in high point densities and therefore is especially well suited when deploying the scanner from fast moving acquisition platforms such as fixed-wing UAVs. The FOV (field of view) of the miniVUX-1DL is 46deg, resulting in optimized efficiency for downward-looking, linear acquisition set-ups like corridor mapping applications, for example. We are pleased to have such an innovative company like Delair as an esteemed OEM integration partner, bringing our sensing technology to key market sectors that require a flexible lidar solution,” commented Michael Mayer, managing director, RiCOPTER UAV GmbH.
RiCOPTER UAV GmbH is a subsidiary of RIEGL Laser Measurement Systems GmbH, an international provider of technology in airborne, mobile, terrestrial, industrial and unmanned laser-scanning solutions. RiCOPTER UAV GmbH commercializes RIEGL’s turnkey lidar UAV solution and laser-scanning payloads dedicated for UAV integration.