An expert has warned the government of the United Kingdom that the lack of an alternative to Galileo threatens to put critical infrastructure at risk, according to a report in Daily Express.
Andy Proctor, formerly with the satellite and positioning, navigation and timing (PNT) cabinet office, submitted evidence of his concerns to the UK’s ministers.
“Our critical infrastructure is at risk from the loss of PNT, space-based or otherwise,” he wrote. “We are currently critically dependent upon GPS; the loss of which will have a major impact in capability and economically.”
Proctor is director of Rethink PNT, a consultancy firm.
He pointed out that the government disinvested in the eLoran terrestrial system that could have provided a backup, although this is slowly reversing.
“For 20 or so years there have been calls for action, yet the current status of inaction regarding the PNT strategy puts our systems at increasing risk, especially given the clear and present electronic-warfare systems being used in Europe today,” Proctor wrote.
Britain was removed from the Galileo project following Brexit, and has since been looking for an alternative PNT system.
The Russian military has disrupted flight systems in three regions since the invasion of Ukraine, highlighting the need for robust alternatives, according to a French safety regulator and as reported by Bloomberg.
Airline pilots have reported jamming of satellite navigation systems around the Black Sea, eastern Finland and the Kaliningrad enclave, said Benoit Roturier, head of satellite navigation at France’s civil aviation authority DGAC.
The jamming signals appear to originate from Russian trucks intent on protecting troops and installations against GPS-guided missiles. While the signals are not aimed at civil aviation, however, they force the pilots to deal with distracting alerts.
“Airplanes hit by jamming can continue to fly using inertial navigation systems — that is standard and works with GPS,” Roturier said. “This could be less accurate, but can be used when GPS goes down.” Yet regulators are realizing the potential for massive airspace disruptions, especially as the European Union pushes for increasing reliance on satellite navigation.
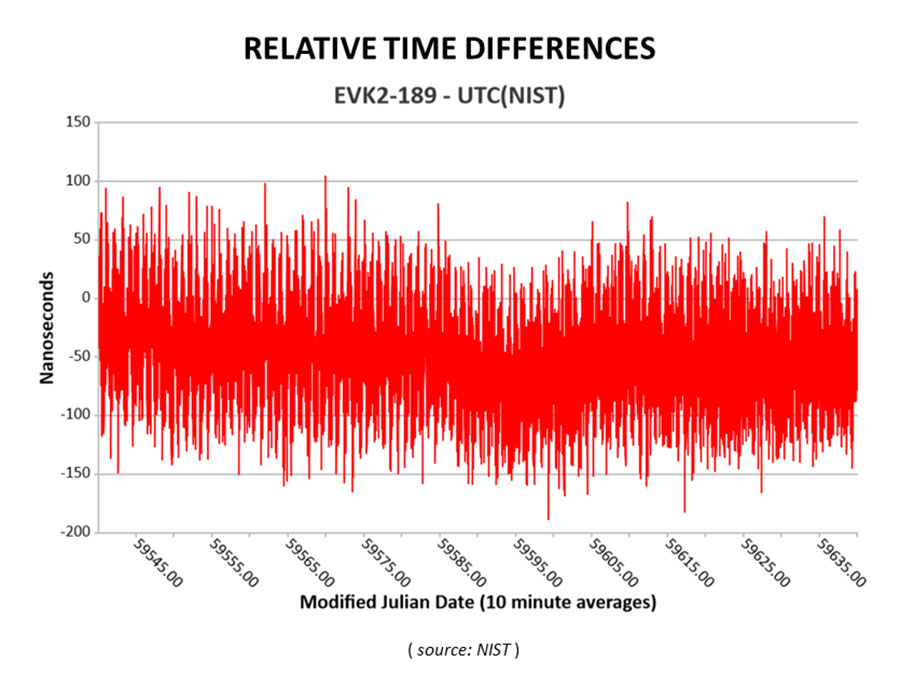
Cooperative agreement expands precision timing distribution options for critical infrastructure and verifies STL’s agreement with UTC via UTC(NIST)
This March 30, 2022, chart of Satelles and NIST testing verifies that STL timing agrees with UTC. (Chart: Satelles)
Satelles Inc., provider of highly secure satellite-based time and location services, has entered a cooperative agreement with the U.S. National Institute of Standards and Technology that directly connects STL’s operational infrastructure to the source of UTC(NIST), the national standard for time and frequency in the United States produced in coordination with the U.S. Naval Observatory.
The agreement calls for Satelles to provide its STL service to NIST. Reciprocally, the agreement includes the introduction of a connection between an STL Ground Monitoring Station (GMS) provided by Satelles to the NIST collection of extremely accurate atomic clocks that maintains the official time scale for UTC(NIST).
The Cooperative Agreement was described in NIST Technical Note 2187, “A Resilient Architecture for the Realization and Distribution of Coordinated Universal Time to Critical Infrastructure Systems in the United States,” published in November 2021.
In February 2021, Satelles delivered and configured an STL GMS at NIST’s Time and Frequency Division in Boulder, Colorado. This facility is home to the ensemble of high-precision cesium beam and hydrogen maser atomic clocks that maintains UTC(NIST).
After conducting a series of successful preliminary tests in the spring of 2021, NIST then directly connected the STL GMS to its primary clock ensemble in June 2021. Comparing timing provided by STL to UTC(NIST), the testing confirmed STL’s long-term stability of better than 25 nanoseconds with short-term time deviation of 50 nanoseconds.
STL from Satelles is a resilient, alternative PNT service from low-Earth-orbit (LEO) satellites that enterprise customers rely on as a primary timing source. Telecom operators, for example, use STL for 5G wireless network deployments where GPS is unavailable indoors or when other timing solutions cannot provide the required level of accuracy.
STL’s agreement with UTC also is important for critical infrastructure and other applications that require an essential contingency capability to protect the operations of PNT-dependent systems and ensure survivability and resilience.
“Satelles has a network of GMS nodes positioned around the world to receive STL signals and calculate the position and timing of the satellites for purposes of producing timing corrections, and
now we are fortunate to have a GMS connected inside NIST’s main time lab,” said Gregory Gutt, president and CTO of Satelles. “It’s an honor to be given direct access to UTC(NIST), especially in an arrangement that delivers benefit to both our customers and NIST.”
Visit satelles.com/nist for more information about NIST reports that detail the performance of STL and collaborations between Satelles and NIST.
NextNav participated in the European Commission’s Joint Research Centre (JRC) alternative positioning, navigation and timing (APNT) evaluation in Ispra, Italy. At the trial, NextNav showcased an alternative PNT backup to GNSS, TerraPoiNT.
According to the JRC, the trial is analyzing the technologies “which could deliver positioning, and/or timing information, independently from GNSS, to be effective backup in the event of GNSS disruption, and if possible to be able to provide PNT in the environments where GNSS cannot be delivered.”
The test furthers the European Union’s creation of a backup to GNSS and is intended to assess which technologies could strengthen and expand the European PNT capacity.
PNT services are critical for the global economy, with studies estimating a contribution to the European GDP of approximately 10%. Today, GNSS services are the backbone of PNT, with an increasing role in new services and technologies, including car-sharing, autonomous vehicles, ship and aircraft navigation, smart logistics and precision agriculture.
It’s About Time
The timing capabilities of PNT are heavily utilized today by critical infrastructure, which is strategic from a commercial and societal perspective, including telecom, energy, finance and transportation. Published studies estimated economic losses of around 1 billion EUR per day if GNSS were unavailable.
NextNav’s TerraPoiNT trial focused on measuring the precision of timing delivery across alternate timing sources to better understand performance in GNSS-free environments — including instances of outages, spoofing and jamming. As a part of the trial, NextNav also demonstrated its capabilities in providing both indoor and outdoor z-axis vertical location.
TerraPoiNT is a system for assured PNT that uses terrestrial transmitters deployed around a service area to triangulate the location of a device. Unlike national space-based systems, the proximity of NextNav’s transmitters makes the signal strength 100,000 times that of GPS.
“The trials are part of the global trend to develop a resilience layer to space-based GPS/GNSS systems that is more secure and available,” said Ganesh Pattabiraman, NextNav CEO. “We are redefining the capabilities of APNT technologies and look forward to working with the European Commission on furthering these initiatives to build a GNSS backup layer that can deliver highly precise PNT across use-cases.”
Trials for U.S., Europe
The U.S. and countries across Europe continue to invest in both understanding and taking steps towards creating a resilient PNT layer in each nation. Participation in the JRC trial builds upon the recent evaluation of APNT technologies in the United States, including a 2021 U.S. Department of Transportation report, where TerraPoiNT was found to be the best performing APNT solution across use cases.
Further, NextNav recently created an APNT testbed in the San Francisco Bay area that was developed as part of a U.S. Department of Homeland Security demonstration used to evaluate the precision and resilience of NextNav’s TerraPoiNT network.
The JRC is expected to report results from the evaluation this spring.
The Air Force Research Laboratory’s complementary positioning, navigation and timing (PNT) AgilePod prototype achieved three important objectives in flight tests conducted at Edwards Air Force Base Nov. 1-10, 2021.
PNT AgilePod helps develop advanced navigation technology independent of GPS, according to Maj. Andrew Cottle, Air Force Strategic Development Planning and Experimentation (SDPE) office. This technology provides reliable, resilient PNT navigation signals through alternative means, increasing mission effectiveness in scenarios where access to GPS is not guaranteed.
The test team — representing a broad base of Air Force, Navy and vendor organizations — successfully executed eight sorties aboard a T-38C aircraft, which included:
the first test of the PNT AgilePod on a high-dynamic-range platform
the first test of fully remote interfacing and alt-PNT data transmission
the first demonstration of overland/overwater transition performance.
He said the tests demonstrated the operational utility of a fused alt-PNT system incorporating multiple technologies within a single government-owned open-architecture prototype.
A PNT AgilePod attached to a T-38C successfully demonstrated remote interfacing and alt-PNT data transmission, as well as performance over land and water. (Photo: USAF/2nd Lt. Bowen Lin, 586th Flight Test Squadron)
AgilePods Designed for Flexibility
AgilePods are comprised of a series of compartments and can be configured to meet a wide variety of mission requirements for many aircraft platforms. Experimenters can fill the spaces with plug-and-play sensors they need for a mission — high-definition video, electro-optical and infrared sensors, and devices with other capabilities — including PNT.
The AgilePod has an open hardware architecture. For the complementary PNT prototype, it was combined with an open software architecture that allows a wide variety of alternative PNT technology to integrate and pass information. These capabilities enable rapid integration of sensor technologies through standardized software and hardware interfaces, allowing the pod to seamlessly integrate on platforms that leverage the standard architectures.
In this way, one pod can perform hundreds of different mission sets with additional benefits of cost savings and increased sustainability, Cottle said.
The project directly supports the AFRL PNT Enterprise and the Air Force PNT Cross-Functional Team as they work to ensure reliable navigation within GPS-contested operational scenarios critical to the success of future Air and Space Force missions.
A PNT AgilePod attached to a T-38C successfully demonstrated remote interfacing and alt-PNT data transmission, as well as performance over land and water. (Photo: USAF/2nd Lt. Bowen Lin, 586th Flight Test Squadron)
By Brandon Weaver, Gianluca Zampieri and Okuary Osechas
Innovation Insights with Richard Langley
IT’S A FACT. GPS and its brethren global (and regional) navigation satellite systems are susceptible to outages caused by both natural and engineered events. Several reports issued in the past couple of decades have documented the vulnerability of GNSS. Twenty years ago this past August, the U.S. Department of Transportation’s John A. Volpe National Transportation Systems Center issued a report, commonly referred to as the Volpe Report, in which they found that “GPS service is susceptible to unintentional disruptions from ionospheric effects, blockage from buildings, and interference from narrow and wideband sources.” Although not explicitly mentioned in the report, besides emissions from communications systems, wideband interference can come from solar radio noise storms overpowering GPS signals. The report also highlighted that the “GPS signal is subject to degradation and loss through attacks by hostile interests. Potential attacks cover the range from jamming and spoofing of GPS signals to disruption of GPS ground stations and satellites.”
The Volpe Report recommended a number of actions to mitigate the vulnerabilities of the GPS signal to disruption or loss, including the need for backups for positioning, navigation and timing — particularly for GPS applications involving the potential for life-threatening situations such as the loss of GPS use for safety-of-life navigation, which would include, for example, aircraft navigation.
With the introduction of GPS (and subsequently the other GNSS and their augmentations) and its widespread adoption by the aviation industry, legacy navigation systems such as Omega, aviation radiobeacons, VHF Omnidirectional Range (VOR) and Distance Measuring Equipment (DME), were either shut down, reduced in their number of installations, or displaced as the primary method of navigation. These systems could not offer the same capabilities as GNSS, and that has led to the high reliance now on GNSS for getting aircraft safely from one airport to another.
But as the Volpe Report pointed out, GPS and (by inference) all other GNSS are susceptible to outages, and so a reliable alternative PNT system that can be readily used for aircraft navigation is needed. Deutsche Flugsicherung, the German air traffic control organization, has proposed such a system, called Mode N. It builds on some aspects of existing navigation systems and aviation-certified signals not originally intended for navigation, including some used for communications and surveillance.
In this month’s column, a team of researchers from the German Aerospace Center introduce us to Mode N, looking at its signal format, required ground infrastructure, aircraft avionics and the potential position accuracy this system could offer.
To accommodate the continued growth of air traffic, air navigation service providers (ANSPs) are planning and implementing programs to increase the capacity and efficiency of airspace. These programs, which include the Next Generation Air Transportation System (NextGen) led by the U.S. Federal Aviation Administration (FAA) and the Single European Sky ATM (Air Traffic Management) Research Programme (SESAR) commissioned by the European Union, heavily rely on GNSS to enable certain capabilities to reach program goals. While intended to serve as the primary source of positioning, navigation and timing (PNT) for aviation services going forward, GNSS is vulnerable to sources of interference. For this reason, efforts have been taken to identify and develop an alternative PNT (APNT) system that can maintain capabilities supported by GNSS when a GNSS outage occurs.
The ANSP for Germany, Deutsche Flugsicherung (DFS), has proposed a concept for such a system that they call Mode N. The proposed design leverages current navigation and surveillance technology to provide a completely new solution to navigation. As the current APNT environment is filled with a variety of proposed solutions spanning the entire field of communications, navigation and surveillance (CNS) technologies, it is useful to describe Mode N within the context of these other APNT systems. This contextual description serves to highlight the interaction of Mode N with current aviation systems — an important consideration for any system intended to serve aviation users. Additionally, as the Mode N design uses similar technological principles as other navigation and surveillance systems, the extensive research performed for APNT can be applied to the Mode N design to provide a preliminary assessment of its navigation performance over Germany.
Development of APNT
The current state of aviation navigation can be simplified by acknowledging that GNSS has replaced legacy navigation systems such as Distance Measuring Equipment (DME) and VHF Omnidirectional Range (VOR) beacons as the primary method of navigation for aircraft. GNSS PNT services enable many capabilities in the airspace that are relied upon by modernization efforts to accommodate the expected increase in air traffic in a safe and efficient manner. Because of GNSS vulnerabilities outlined in the 2001 Volpe Report, it was recognized that an alternative system that could enable the same capabilities as GNSS would be necessary to continue safe and efficient operation of airspace as envisioned if GNSS is unavailable.
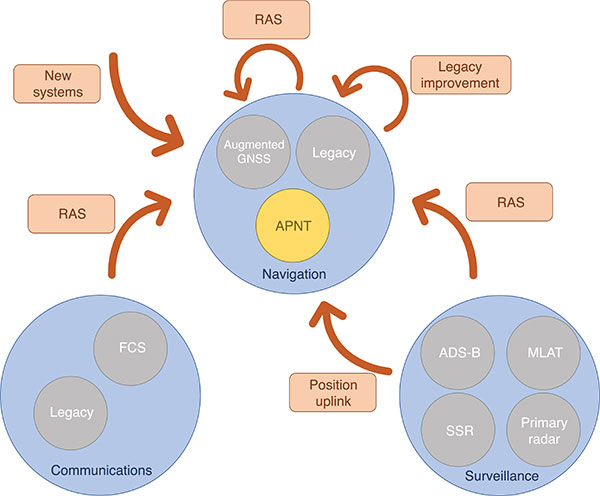
Proposed APNT solutions are generally sourced from the existing CNS environment. A common strategy is to use an aviation-certified signal not originally intended for navigation, which we have termed repurposed aviation signals (RAS). Other proposals include improving legacy systems, transmitting the ground-computed position to an aircraft, and creating new systems entirely. These sources of APNT are summarized in FIGURE 1 with explanations of the abbreviations to follow.
FIGURE 1. Sources of APNT for navigation. (Image: Weaver et al)
A natural candidate for APNT is the use of existing non-GNSS navigation infrastructure. Prior to GNSS, VOR beacons providing beacon-relative heading information and DME navaids supplying two-way range information were the primary navigation infrastructure. Improvement in DME avionics enabled tracking of multiple DME stations, providing a DME-only position solution referred to as DME/DME. Adding DME ground stations and upgrading existing hardware to increase accuracy and coverage of DME/DME positioning was therefore an attractive APNT option.
Another option sourced from the existing navigation infrastructure was to use RAS for positioning. One such RAS is that of the DME reply signal to a non-existent aircraft. By triggering DME responses in a desired fashion, aircraft can use the triggered responses for passive ranging without any change to the DME ground stations.
Communication systems for aviation are also undergoing modernization efforts. Future communication systems (FCS) are being developed to provide broadband communication capability between aircraft and controllers.
Surveillance is the domain of ground-based systems that determine the position of remote objects and is fundamental to allowing safe spacing of aircraft. Its origins reside in the development of primary radar, which was then complemented with secondary surveillance radar (SSR). Both primary radar and SSR use a rotating antenna to measure range and bearing to determine the location of the remote objects. Radar systems tend to be clustered around airports, limiting their area of coverage. To expand coverage in challenging terrain where radar is difficult to install, a technique known as multilateration is used, where a surveillance ground system can receive a signal from an aircraft and determine its position by comparing the time of arrival (TOA) of the signal between its ground stations. These systems were considered as a source of APNT by providing the aircraft position computed on the ground back to the aircraft via data uplink, but timely authentication and integrity concerns have stalled this approach in the United States.
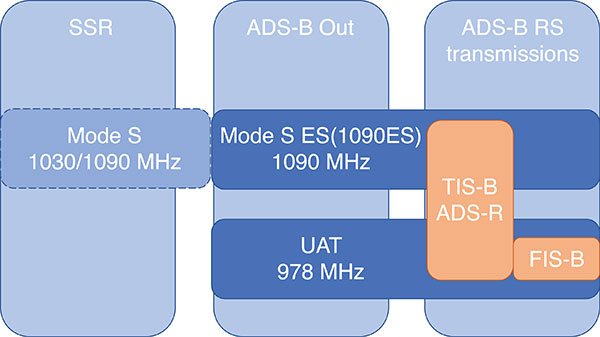
Surveillance RAS for APNT. The other branch of surveillance-sourced APNT is by using RAS, and this is very relevant to the design of Mode N. The system providing many of the RAS for navigation is ADS-B. With this service, an aircraft broadcasts its GNSS-derived position (ADS-B Out) to ground-based stations and any aircraft capable of receiving ADS-B transmissions. ADS-B is an important part of airspace modernization strategies; it is mandated for aircraft operating in most U.S. airspace, with European mandates following suit. ADS-B ground stations, referred to as ground-based transceivers (GBT) or radio stations (ADS-B RS), collect ADS-B Out messages for use by air traffic operators. These ADS-B RS also provide their own transmissions for use by aircraft that can receive ADS-B broadcasts (ADS-B In capability) and include weather information, nearby air traffic and so on.
ADS-B can use different protocols to transmit its signals. The Mode S (S for selective) protocol was designed to allow SSR ground stations to selectively interrogate aircraft in their coverage area, reducing congestion on the reply frequency. The Mode S reply format consists of a four-pulse preamble and a data block containing either 56 or 112 information bits for the aircraft to provide information dependent on the interrogation received. Mode S is internationally standardized, and an extended format known as Mode S Extended Squitter was adopted for Automatic Dependent Surveillance Broadcast (ADS-B) services. Mode S Extended Squitter or 1090ES (as it’s transmitted exclusively on 1090 MHz) is also used by the ADS-B RS that rebroadcast ADS-B Out (ADS-R) and provide traffic information services (TIS-B) to nearby aircraft with ADS-B In capability.
Another protocol, used in the United States, is the Universal Access Transceiver (UAT) format. Like 1090ES, UAT is used by certain aircraft to transmit their ADS-B Out messages. Similarly, ADS-B RS transmits TIS-B and ADS-R messages with the UAT protocol; it also includes additional information that it transmits with the Flight Information Service – Broadcast (FIS-B). UAT signals are transmitted in the United States on an unused DME channel frequency of 978 MHz. FIGURE 2 summarizes the relationship between these surveillance signals and the services that use them.
FIGURE 2. Services using Mode S and UAT signal formats.(Image: Weaver et al)
Research investigating the ground-transmitted (ADS-B RS) 1090ES and UAT signals for ranging measurements greatly supports the assessment of Mode N presented here, as the Mode N system operates on a similar basis with a signal that blends characteristics of 1090ES and UAT.
Mode N Overview
Mode N (N for navigation) is a passive ranging system concept from DFS that seeks to provide APNT while reducing the spectrum congestion caused by existing aeronautical navigation and surveillance systems. The design includes the possibility for two-way and air-to-air ranging, but this overview focuses on the preferred passive mode of operation. It is designed around the Mode S format, which as mentioned, is used for SSR and ADS-B services. Despite early references to an SSR/N system, Mode N is not a new SSR mode but rather a new navigation system.
The basic concept is for Mode N ground stations to transmit on a single frequency signals that include ground station ID/coordinates, allowing aircraft with Mode N avionics to receive those signals and determine position in a similar manner to GNSS. As a single frequency is desired to minimize spectrum usage, the ground stations would space their transmissions apart to avoid intersystem interference. This scheme, known as time division multiple access (TDMA), would require information within the signal message on the scheduled time a ground station transmits, which the Mode N format allows.
Because Mode N shares many design aspects with Mode S, DME and other surveillance RAS, it is able to leverage previous APNT work for the benefit of its own analysis. Therefore, the overview of the design is described here relative to other APNT systems, as this is the basis of the preliminary performance assessment we present.
The Mode N Signal. The Mode N design proposes using the Mode S downlink signal format as the basis for its ranging signal to be used by the aircraft for passive position determination, with some key differences. The frequency channel on 1090 MHz is too congested to accommodate more signals; thus, the first difference is that Mode N intends to transmit on a different frequency. While the channel selection is still ongoing, unused DME channels have been identified as options for frequency allocation.
The second difference is the message content. As the Mode S downlink format transmits mainly aircraft-specific information, Mode N ground transmitters would instead populate their messages with information needed for passive ranging: ground station coordinates and time of transmission (TOT). The study of 1090ES messages (which also contain aircraft-specific information despite being transmitted by ground stations) as RAS required some special techniques to first identify which station was transmitting the message. The TOT is not present in 1090ES signals, but more importantly the time of transmission is not synchronized to any consistent reference. Aside from transmission frequency and message content, the Mode N signal design follows the Mode S downlink format (modulation, pulse shape and so on).
The Mode N signal also shares some aspects with the UAT signal, particularly the FIS-B segment. First, UAT is also transmitted in the United States on an unused DME channel. The FIS-B message, which provides weather information, transmits the ground station coordinates and information that can be used to estimate the TOT. Specifically, UAT messages are synced to UTC, and each ADS-B RS has a designated time slot within a one-second interval where it transmits its FIS-B message. This time slot is included in the message, and can be used to determine the TOT of the signal. Mode N is designed to work in this exact manner, minus the weather information. One crucial difference between UAT and the Mode N design is the type of modulation. Like Mode S, Mode N proposes using pulse-position-modulation (PPM) or on-off keying (OOK). The resulting wider bandwidth — estimated to be less than 4.6 MHz at –3dB — has better resistance to multipath, whereas UAT is frequency modulated to maintain a narrow bandwidth to avoid interference with DME and is more susceptible to multipath. Research on UAT signals for pseudoranging capability (also determined at a higher update rate than once per second) would be necessary for navigation, an important consideration for the final Mode N design.
Ground Infrastructure. The Mode N design, while based on RAS from the surveillance capability, requires new ground stations to transmit the Mode N signal. Requirements for the ground stations are that they provide adequate coverage to meet the requirements of an APNT system and that they are sufficiently synchronized in time. An initial time-synchronization scheme is the use of a radio frequency (RF) network consisting of the ground stations themselves, which requires radio line-of-sight of stations throughout the network. DFS performed a study and found that additional time-beacon stations would be necessary to maintain this RF time network, even though navigation coverage was provided using existing DME sites as hypothetical Mode N stations. Since these aspects of the design are still developing, the preliminary assessment we present assumes a network layout and time synchronization tolerance. As the Mode N design blends various CNS principles, a natural baseline design for the ground station locations consists of existing DME and surveillance sites in Germany. Using these locations for the ground stations enables computation of a horizontal dilution of precision (HDOP) at discrete locations throughout Germany. The assumed time synchronization is discussed further when developing a model of the Mode N ranging accuracy.
Avionics. An interesting aspect of the Mode N design is its proposed avionics unit. The Mode N avionics must be capable of receiving Mode N messages, which it can do with the existing DME antennas on aircraft. The Mode N avionics unit must then decode the messages for position determination. Its active mode for two-way and air-to-air ranging would require the Mode N avionics to transmit Mode N messages, again using the existing DME antenna.
Recognizing the continuing investment in the DME network by multiple countries, the Mode N avionics sensor is essentially built around a fully functional DME unit. This is intended to provide a seamless transition as Mode N stations are brought on line. The design of the avionics has little effect on the coverage assessment, aside from guaranteeing a minimum level of performance based on the current DME network, but is an important part of the implementation strategy. Furthermore, this blend of avionics has also been proposed for a unit compatible with DME and ADS-B (1090ES and UAT) signals.
Preliminary Coverage Assessment
Preliminary coverage assessments are a typical method to determine the feasibility of a proposed system to provide the required level of performance over a given area. A simple method of characterizing the position performance is in terms of the linear relationship between range error and DOP, where the range errors are assumed to be zero-mean, uncorrelated, and have identical distributions.
As the aircraft is assumed to have additional sensors for determining its altitude, HDOP is commonly used to characterize the expected horizontal position performance.
With range measurements, HDOP is a function of the transmitter geometry available to an aircraft at a given point. It is a straightforward computation to perform for a grid of points over the area of interest. The HDOP computation does depend on the type of range measurement, so passive (pseudo-) range, two-way range, and time difference of arrival (TDOA) measurements all have their corresponding DOP computation. Determining a model for the range error is less straightforward, and assessing the coverage potential of Mode N requires an estimation of the expected range error.
Modeling Mode N Range Accuracy. As Mode N is not an existing system, abundant quantities of real measurements are unavailable for empirically characterizing the range performance. However, since Mode N is heavily based on the Mode S signal format and functions similarly to the DME and UAT signals, which all exist and have been measured extensively, research investigating those signals can help derive the model for the Mode N range performance.
An alternate approach is to reference the standards for a specified performance level. For example, ICAO documentation specifies that the Airborne Collision Avoidance System (ACAS) logic use a zero-mean normal distribution range error model with a standard deviation of 50 feet, or about 15 meters. As ACAS also uses the Mode S signal format, this appears to be a reasonable source for the Mode N range error. However, since ACAS is an airborne two-way surveillance method, it does not exactly translate to a ground-based passive TDOA system such as Mode N. The 15-meter standard deviation is still useful, as it provides a check on the estimated Mode N accuracy. Other specifications suffer from similar drawbacks — Mode N does not directly apply to any single system. Thus, we apply the blended approach using previous APNT research.
The fundamental measurement for the passive ranging mode of Mode N is the TDOA between pairs of ground stations. This measurement is in seconds, and is translated to a range difference by using the speed of radio signal propagation in a vacuum. (See our conference paper for further details.)
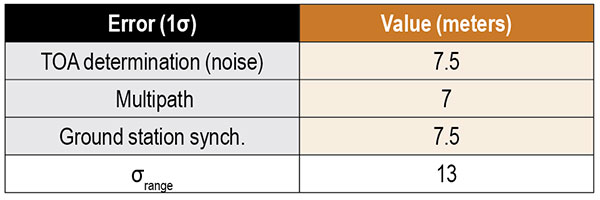
Errors can be present in the TOA measurement, synchronization of the nominal TOT of the signals, and parsing of the time slot data field. The TOA measurement can have errors by inaccurate determination of the actual TOA due to noise or multipath and by the actual TOA differing from the nominal arrival time of the signal due to atmospheric delay. For terrestrial systems, propagation errors are considered to be dominated by multipath, so we don’t consider atmospheric effects here. Time synchronization errors are very important to the ranging accuracy, but it is assumed the time slot data field is parsed accurately. Other sources of error, such as inaccurate ground station coordinates, can affect the position error but have no effect on the range error. Additionally, the error originating from the change in aircraft position between reception of signals at ground stations is not considered in this article. The model of range accuracy can then be expressed as the root-sum-square (RSS) of the dominant individual error components.
We studied each error component in isolation, selecting the applicable APNT research to leverage based on the Mode N design aspect that most corresponds with that error.
Since the Mode N design also uses a pulsed signal, the evaluation of DME (specifically, DME/N) ranging performance is the starting point for estimating the TOA noise error. Part of the APNT effort was evaluating current DME performance, as it was thought it exceeded the specified performance in standards. A study found that current DME performance allowed a budgeted TOA error of 15 meters, 2σ.
For the Mode N error model, a 7.5-meter error is an attractive option to choose as it is the average of two other sources and is the most recent. This value is a conservative estimate of the TOA accuracy for Mode N because the Mode N/S pulse shape is narrower than the DME pulse with a greater bandwidth, improving theoretical accuracy. For the preliminary coverage assessment, a conservative estimate is desired, because the actual TOA accuracy will vary over an area depending on transmitter distance — which impacts the level of signal noise. Note that the DME TOA errors are not divided by two as is done for the total DME error as they apply to a one-way TOA measurement.
After assessing the relevant studies, we modeled the multipath component of the error following that from Mode S as 7 meters, 1σ.
The final error component to estimate for Mode N is that of the synchronization of the ground stations. Based on the results from studies of the UAT signal and those from eLoran, we set a 15-meter maximum bias as a 2σ error component in the Mode N error model.
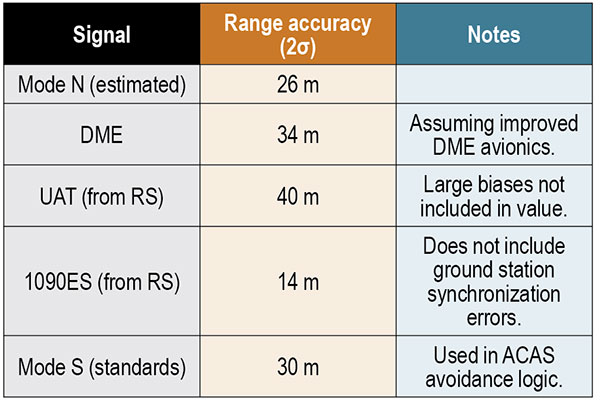
Our error analysis is summarized in TABLE 1.
TABLE 1. Predicted Mode N range accuracy. (Data: Weaver et al)
A total 2σ error for current DME performance of 92 meters has been established, which translates to 46 meters of range accuracy after dividing by two (since the DME signal is a two-way range). A substantial part of this error derives from the avionics bias, which is minimized for a “potential” DME error budget due to an assumed improved avionics performance. This results in a DME range 2σ error of 34 meters. We chose this value to compare as the effect of avionics has less of an impact in a passive ranging system such as Mode N.
Range performance for UAT signals was evaluated with measurements showing 20-meter (1σ) error when compared to GNSS truth, not including large biases attributed to ground station synchronization or processing errors. The 1090ES signals do not have an inherent ranging capability, so the TDOA measurement error of two ground station signals to one receiving station is difficult to measure. Instead, researchers have measured the differential TOA (DTOA) of one ground station signal received by two (GPS-synchronized) receiving stations to first identify which station transmitted the signal. When compared to the true DTOA based on ground station and receiving station coordinates, the measurements contained small biases around 10 meters with a standard deviation also less than 10 meters. Being DTOA measurements, these do not contain ground station synchronization errors, so the reported standard deviations correspond mostly with propagation and determining TOA. The 10-meter DTOA 1σ error can still be converted to a range error resulting in 14 meters (2σ). These results are summarized in TABLE 2.
TABLE 2. Comparison of Mode N with other APNT signals. (Data: Weaver et al)
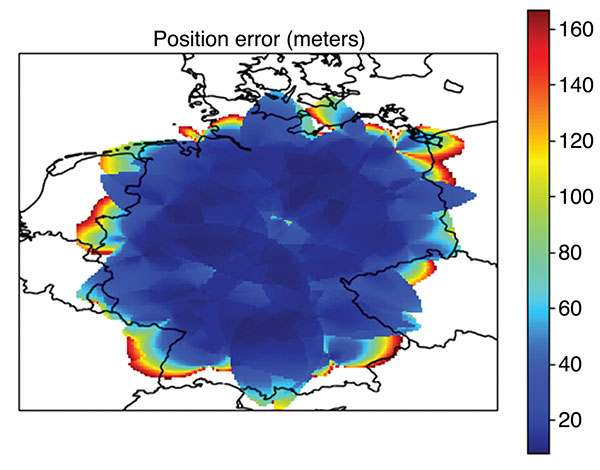
Coverage Assessment. With the estimated ranging accuracy, a preliminary coverage over Germany could now be assessed. Using the current 29 surveillance site locations in Germany and assuming that a minimum of three stations is necessary for positioning, the estimated position accuracy is shown in FIGURE 3.
FIGURE 3. Estimated position error (in meters) for aircraft within a 100 nautical mile coverage radius using existing surveillance sites as installation locations for Mode N ground stations. (Image: Weaver et al)
The coverage assessment used a “flat” Germany model with the estimated range accuracy from the preceding section (13 meters, 1σ). Atmospheric and terrain considerations were not applied in the assessment. It is important to note that this level of coverage would degrade at lower altitudes.
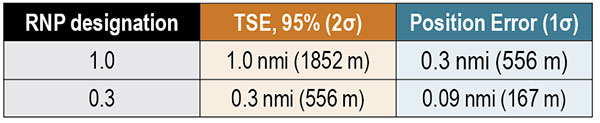
To determine whether this level of accuracy is sufficient for the airspace modernization efforts in Europe, the desired Required Navigation Performance (RNP) accuracy requirement must be examined. For RNP 1.0, where 1.0 refers to the required 95% or 2σ total system error (TSE) accuracy in nautical miles, the position error allocation is assumed to be 30% of the RNP/TSE value. The required position accuracy is shown in TABLE 3.
TABLE 3. RNP required horizontal position accuracy. (Data: Weaver et al)
From Figure 3, aircraft at altitudes within the service volume supported by a 100-nautical-mile coverage radius are capable of meeting the accuracy requirement for RNP 1.0 and 0.3 within most of Germany. Coverage along the border is unavailable as only German surveillance site locations were used.
Conclusions
Although our derivation of accuracy and the coverage assessment method we used made several simplifying assumptions, the results indicate that Mode N has the potential to be a feasible APNT system. To be a part of the modern airspace navigation infrastructure, additional accuracy requirements must also be met. The integrity requirement is harder to meet than accuracy, and requires either redundant information available to the aircraft for a receiver autonomous integrity monitoring-like algorithm or a ground-based monitoring/augmentation system. Perhaps the biggest challenge to implementing the Mode N infrastructure is maintaining an RF-based time synchronization network. Convincing aircraft operators to update their avionics is another challenge to Mode N implementation, although the inclusion of DME functionality in the Mode N avionics seeks to ease that transition.
DISCLAIMER
The views expressed herein are those of the authors and are not to be construed as official or reflecting the views of Deutsche Flugsicherung.
ACKNOWLEDGMENT
This article is based on the paper “An Overview of the Proposed Mode N System in the Context of Alternative Position, Navigation, and Timing (APNT) Development” presented at ION ITM 2021, the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
BRANDON WEAVER is a researcher at the German Aerospace Center (DLR) and works on alternative navigation systems.
GIANLUCA ZAMPIERI joined the Alternative Navigation Systems Group at DLR’s Institute for Communication and Navigation in 2019.
OKUARY OSECHAS leads the Alternative Navigation Systems Group in the Institute of Communications and Navigation at DLR.
This week Sen. Patrick Leahy (D-Vt.), chair of the Senate Appropriations Committee, released that body’s version of nine different appropriations bills. The accompanying report for the bill to fund the Transportation Department (DOT) outlines the Senate’s intentions and way forward for establishing alternatives to GPS.
The report provides $15 million for the fiscal year that began on the first of October “to establish a program that leads to wide adoption of multiple technologies that provide the necessary GPS backup and complementary PNT as identified by the Department’s report.”
The department report referenced was on a demonstration project that examined GPS backup and complementary technologies from 11 different vendors. That DOT report found, based on the technologies demonstrated, a combination of signals delivered from space, terrestrial low frequency (LF) and ultra-high frequency (UHF) broadcasts, and fiber would best meet the nation’s needs.
The Senate report accompanying the funding bill outlines components of the GPS alternatives program, including:
development of safety-critical PNT requirements and standards,
user adoption models to facilitate responsible use of resilient PNT, and
procurement of services deemed appropriate by the department.
The Senate Committee report can be found here. Relevant provisions are on page 12.
Services Contracts
While not setting a deadline for issuance of a Request for Proposal, the mention of procuring services is seen by many as a strong indication that Congress expects more than just additional studies.
Services contracts, as opposed to the government building its own system, have long been advocated by numerous members of industry and by the Resilient Navigation and Timing Foundation. Contracting for services with commercial providers is a better model, they have argued, as the needed technologies are mature and commercially available. Also, issuing one or more services contracts would avoid the need for the huge funding lines and lengthy delays inherent in a government major systems acquisition.
Many have suggested that services contracts would also be a much more economical approach for the government. They say commercial interests can operate their systems more efficiently, and that they could offer additional services to other customers, potentially reducing costs to the government.
ADS-B Sets Example
Such an approach was used by the Federal Aviation Administration (FAA) for the ADS-B air traffic safety and management system. The FAA needed to monitor and use signals from ADS-B equipment aboard a wide variety of aircraft flying in U.S. airspace. Rather than building a nation-wide ground infrastructure, the FAA issued a long-term service contract for a company to collect and provide the signals. The awardee, Exelis (now L3Harris), won the contract, built the infrastructure, and now provides ADS-B information to the FAA and others on a subscription basis.
Most observers expect the portions of the Senate bill and report about the GPS alternatives program to be adopted in conference with the House and then enacted into law.
How far the Department of Transportation will be able to develop the program this fiscal year remains to be seen. The Senate provisions do require DOT to report on its progress in a year’s time. Earlier informal reports and updates to the committee are likely to inform funding and other legislation on this effort for fiscal year 2023.
Dana A. Goward is President of the Resilient Navigation and Timing Foundation
A notice of award was posted Oct. 11 by the European Union for seven contracts to six different companies for demonstration of non-GNSS positioning, navigation, or timing solutions.
The awardees are OPNT BV from the Netherlands; Seven Solutions SL from Spain; SPCTime of France; GMV Aerospace of Spain; Satelles Inc. of the United states; and Locata Corporation of Australia.
Locata received two separate contract awards: one to demonstrate delivery of time, and the other for positioning.
According to the EU project officer, Ignacio Alcantrailla-Medina, some of the awardees will demonstrate delivery of time, some positioning, and some both. Locata received separate awards because the company provided separate responses for timing and positioning.
Eleven different companies responded to the tender, according to the announcement. No information was provided on the unsuccessful bidders.
The EU tender for this project was announced in October 2020. The stated goal of the project is to better understand available non-GNSS PNT technologies. The intent is to identify potential backups for GNSS during an outage. All offered technologies were required to be able to operate independently from and have “no common points of failure with” GNSS.
Alcantrailla-Medina says the demonstration project is expected to last seven and a half months. As part of this, a public event will be held at the EU’s Joint Research Center in Ispra, Italy, in March or April, 2022. This will be followed by a consolidated report on the project in May or June.
This consolidated report will be used in the next edition of the European Radionavigation Plan due out next fall, according to Alcantrailla-Medina.
Companies that did not respond to the EU’s tender or were not selected for a contract can still have information about their products and services included in the consolidated report, says Alcantrailla-Medina. Now that all contracts for the demonstrations have been awarded, he is open to receiving the information and can be contacted at:
Ignacio.ALCANTARILLA-MEDINA
European Commission
DG Defence Industry and Space
Unit C2 – Satellite Navigation
Avenue d’Auderghem 45, (BREY 7/297)
B-1049 Brussels/Belgium
Alternative. Complementary. Backup. Co-primary. These are some of the terms used to refer to sources of positioning, navigation and timing (PNT) data other than GNSS satellites.
The four current GNSS constellations — supplemented by two regional ones and by public and private augmentation systems — have firmly established themselves as the primary source of PNT data by virtue of their accuracy, reliability, global coverage and ubiquitous use. Yet, this widespread dependency on them — especially on GPS — coupled with their well-known vulnerabilities to jamming, spoofing, other RF interference, multipath, solar flares and space debris (see page 10) — make the development of alternative sources of PNT data imperative. In fact, the U.S. Congress has repeatedly mandated it.
Typically, when talking about alternative PNT, we are referring to sources of PNT data that either were not originally developed for navigation purposes — such as television broadcast towers used as “beacons of opportunity” — or that use a higher broadcast power or a different frequency band than GNSS. They include legacy systems and new versions of legacy systems, such as eLoran.
“The only replacement for a GNSS is another GNSS.”
Other non-GNSS sources of PNT data have a wide range of benefits, limitations and costs, including infrastructure requirements. Most provide only the P and the N, or only the T, in PNT. Inertial systems, for example, once initialized can provide positioning and navigation, but need to be periodically re-initialized to compensate for their drift. Therefore, while excellent for maintaining the navigation solution during short GNSS outages and very helpful in identifying false GNSS measurements due to multipath, they are no replacement for GNSS. Cameras, radar and lidar, while often excellent sources of relative positioning, cannot provide absolute positioning.
It is even harder to replace GNSS when it comes to timing. Already enormously important in synchronizing the Internet, financial transactions and broadcasting, this service is essential to the development of complex new systems, such as integrating autonomous and legacy vehicles into digital traffic networks.
As in other human enterprises, the key to resiliency in PNT is diversity: a mix of systems based on sufficiently distinct technological foundations so that a threat to one does not imperil the other ones. Additionally, having a variety of available sources of PNT data will enable users to choose the ones most suited to their platforms.
However, we need to distinguish between technologies that can assist GNSS, such as inertial, and those that could substitute GNSS. I agree with Chuck Schue’s definition of the latter (see cover story, page 28): “an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from the primary solution to withstand the effects that might be affecting it.”
Ultimately, Schue pointed out to me, “the only replacement for a GNSS is another GNSS.” So, let us stop referring to systems that are not true substitutes for GNSS as “alternative PNT.” Complementary is a more appropriate adjective.
What is the most promising development or project in alternative PNT?
John Fischer.
“PNT from LEO (low-Earth orbit) satellites offers the most immediate alternative to GNSS because the signals are ~30 dB or more stronger, reducing jamming vulnerability. With these new constellations being launched to improve communications, PNT services can ‘piggyback’ on the secure two-way links and avoid spoofing attacks as well. Geometric dilution of precision (GDOP) will not be a problem in these large second-generation constellations with dozens of satellites in view. Wide bandwidth links should yield accuracies to rival GNSS. There may be subscription fees to get this added resiliency, but nothing worthwhile is ever free.”
John Fischer, Orolia
Bernard Gruber
“It depends on the application. I believe that alternative PNT, and specifically systems that complement GPS/GNSS, will continue to drive forward at a very rapid pace. Quite frankly, the ‘affordability of GPS’ from a commercial and military user business case was impossible to ignore for years. Today, the threat to GNSS signals is very real. History illustrates that ‘alternative’ systems that employ environmental data (magnetic, celestial), radio navigation (Loran, VOR), sensors (gyros, accelerometers), seekers (SAL, EO/IR) and IMUs all have new and promising developments today.” Bernard Gruber, Northrop Grumman
Thibault Bonnevie
“Inertially aided GNSS solutions are now mature and provide excellent navigation performance in many challenging conditions. On the research side, there are many exciting alternative PNT projects ongoing. RF-based solutions, such as Bluetooth/Wi-Fi or LEO satellite ranging, give promising results but are still subject to jamming or spoofing. Just like GNSS. Vision-based SLAM is probably the most exciting technology as it enables navigation in a wide range of situations and does not rely on any kind of infrastructure. It only requires low-cost sensors to be operated.” Thibault Bonnevie, SBG Systems
Ismael Colomina
“We all know that predictions are hazardous, especially about the future. This said, I confess that I am particularly interested in the technical, regulatory and commercial development of the LEO-based PNT technology with either dedicated constellations, like XONA’s Pulsar, or broader scope ones such as Iridium Next, Starlink or Kuiper. While GNSS has progressed tremendously in recent times — it plays a large role in the navigation of autonomous vehicles — it is still vulnerable to intentional or unintentional jamming. Integration of LEO-based PNT with current GNSS and other motion sensors appears to be a fascinating field ahead of us..” Ismael Colomina, GeoNumerics
The stated goal of a recently published RAND study was to answer a question from Congress about what should be done to back up and complement the nation’s GPS. One of its findings was that the government should consider investing in a national timing network.
Yet the study’s report emphasizes the wrong things, according to some. So much so that it is working against establishment of a timing network to reinforce GPS.
Report Misleading
“The main thrust of the study’s report is that we don’t need another GPS-like, system,” said Pat Diamond. “That has always been fairly obvious. I don’t know anyone who has ever advocated for duplicating GPS.” Diamond is CEO and founder of a network company and is a member of the president’s National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board.
“By pounding so hard on the ‘don’t duplicate GPS’ drum, RAND hides its more important findings,” he said. “The public message comes across as there is no need to do anything.”
Diamond thinks the study should have better highlighted the things the federal government should do. “That is really the question Congress wanted answered,” he said.
RAND’s study supports four federal initiatives that “… appear to be cost-effective or close to cost-effective.” Included are a “timing-only” GPS-backup and support of high performance “geographically limited” systems.
Timing Essential, GPS Backup Needed
Cover: NSTAC
GPS timing signals are used in a wide variety of technologies including cell phones, IT networks, digital broadcast, first responders’ hand-held radios, and to synchronize electrical grids. Yet these signals from space are weak and easily disrupted.
A timing backup for GPS is also a long-standing recommendation of the president’s National Space-based PNT Advisory Board.
“There are few things more important to tech infrastructure today and tomorrow than timing,” according to Marc Weiss who was a lead researcher at the National Institutes of Standards and Technology for 35 years.
The RAND study was a cost-benefit analysis, which some have argued was not the best approach.
“Cost-benefit is always tricky,” says Greg Winfree, Director of the Texas Transportation Institute. “There are always a lot of assumptions. Small changes to any of the inputs can radically change the outcomes.” Winfree led civil PNT efforts during the Obama administration as an official at the Department of Transportation (DOT).
“One of my big concerns is that GPS is so important to so many things in America, that it is one of the most attractive targets for our adversaries. At least one alternate PNT that most people can access takes the bullseye off GPS,” Winfree said.
Scott Pace, director of the Space Policy Institute at George Washington University (GWU) agrees a diversity of PNT sources is important. At a recent GWU event, Pace commented having an alternative to GPS will contribute to national security and improve global stability. It will “lower the pressure on us to escalate and respond” should GPS satellites be damaged, or services disrupted. Pace was the Executive Secretary of the National Space Council in the Trump administration.
In the book The Russia Trap, author George Beebe has similar concerns, citing the lack of a backup for GPS as a technology resilience gap. Russia, China, and Iran all have terrestrial backups for PNT signals from space while the United States does not. Beebe says this is a weakness that can be exploited and could lead to an escalating series of exchanges resulting in all-out war.
Government Investment in Location Services
The RAND study suggestion for the government to invest in highly accurate PNT services in some limited geographic areas cited emergency responders’ needs for precise location. Federal investment will likely be required, it says, as commercial entities cannot make a business case everywhere service is needed.
GWU economics professor Diana Furchtgott-Roth has written that the federal government needs to provide a complement to GPS. She served as a Deputy Assistant Secretary at DOT from 2019 to 2021 leading civil PNT issues for the government.
“Without federal participation, commercial providers won’t ensure adequate resilient services for everyone. Some sectors, such as finance, will have it, but others won’t. This is a matter of national and homeland security. The RAND report did not emphasize this sufficiently.”
Questionable Timing and Motivation
“This is a particularly bad time for a confused message,” said a congressional staff member speaking about the RAND study. “Congress mandated a timing backup for GPS in 2018, though the project was never funded. There is real momentum this year to provide that funding, but the way this study reads works against that.”
Others see the structure of the study’s report and the timing of its release as a deliberate effort to derail budget negotiations. One retired Department of Homeland Security (DHS) official sees a pattern but is at a loss to explain the motivations behind it.
“RAND’s study was completed in 2019, and it was used as the basis for a DHS report to Congress in April 2020. But DHS didn’t tell Congress about RAND’s findings on a timing network and other actions the government should take,” they said.
“The study being made public now saying ‘do not back up GPS’ smells like a deliberate attempt to derail funding for the timing system. Something two presidential advisory boards, telecom leaders, RAND and so many others agree is needed.”
“Why would someone want to do that?” they asked. “Why would they want to keep America’s PNT so much weaker than China’s, Russia’s, and those of other countries?”
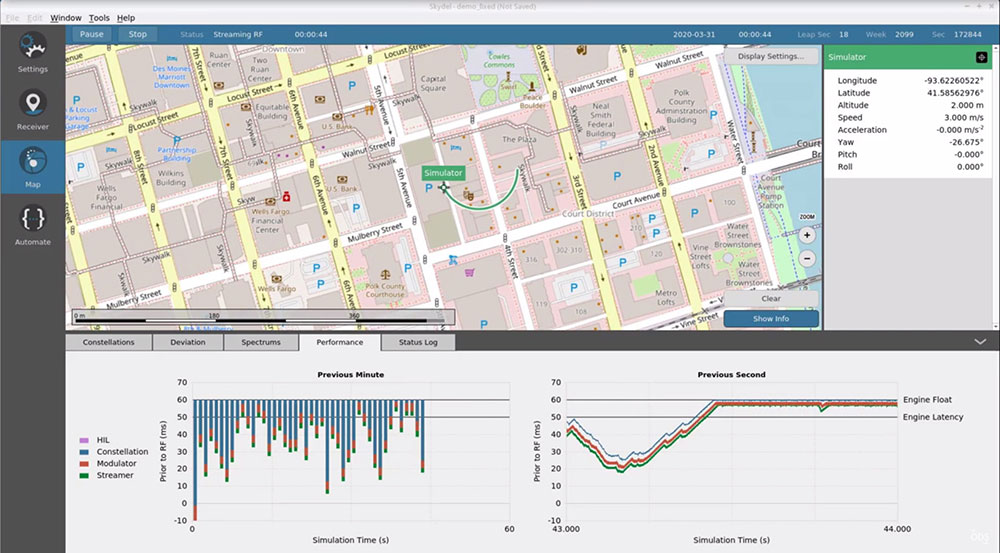
Latest advancement from Skydel uses software-defined advantages to deliver real-time performance
The Skydel Real-Time Performance graphs illustrate the software-defined engine’s low latency during a GNSS simulation. (Screenshot: Orolia)
Orolia has announced the launch of its Real-Time Performance capability, which achieves an ultra-low latency of five milliseconds. The feature will be standard on all Skydel-powered GNSS simulators.
Skydel is a software-defined simulation engine that powers Orolia’s advanced GNSS simulators including its BroadSim (available via Orolia Defense & Security) and GSG product lines.
“Skydel is known by users for its intuitive nature and ability to be quickly redeployed for a variety of projects,” said Tim Erbes, director of engineering for Orolia Defense & Security. “Delivering Real-Time Performance with latency as low as five milliseconds further shows that Orolia is a market leader empowering our customers by exceeding their expectations.”
Skydel’s software-defined architecture is designed to meet the demanding GNSS simulation testing requirements in the automotive, military, space and other high-tech industries. Skydel also supports hardware-in-the-loop simulations without sacrificing ultra-low latency and high-end performance.
The user interface has a sophisticated dashboard showing Real-Time Performance graphs. The tool enables users to grade the simulator’s performance, interpret data, diagnose inefficiencies, and optimize scenarios on the fly. In a video tutorial, Orolia demonstrates how the simulation engine processes data and how easy it is to read the graphs through its visualization and precise indications. As the system reaches its limits, it remains stable and fully operational, preserving the integrity of the simulation.
Erbes said the Real-Time Performance graphs not only instill confidence in the simulator, but also allow for better integration in the testbed.
“For example, instead of just hoping their hardware-in-the-loop configuration is working, users can view the real-time data and see that low latency is being maintained,” he said. “This feature provides enhanced visibility not only into the performance of the simulation, but also into the reliability of the hardware-in-the-loop integration, resulting in a more robust solution. This is critical when generating complex environments with high dynamics, jamming, spoofing, repeating, and alternative PNT sensors.”