Anello Photonics and Q-CTRL have entered a strategic partnership to develop resilient navigation solutions for unmanned aerial vehicles (UAVs) operating in environments where GPS is degraded or unavailable.
The collaboration focuses on integrating Anello’s Silicon Photonics Optical Gyroscope (SiPhOG) technology with Q-CTRL’s Ironstone Opal quantum magnetic navigation capabilities. This integration creates a multi-layered quantum navigation solution (QNS) designed to provide continuous, bounded positioning estimates that do not degrade over the course of a mission. By combining silicon photonics-based inertial sensing with quantum-powered magnetic map matching, the companies aim to provide a critical backup to GNSS.
Reliability in satellite navigation has become a significant concern across both defense and commercial sectors. Vulnerabilities such as jamming and spoofing pose a documented $1B daily threat in the United States, impacting logistics, transport, and military operations. Recent disruptions in the Persian Gulf have further highlighted the challenges faced by maritime and aerial platforms when GNSS signals are compromised.
The initiative represents the first time these two specific technological approaches have been integrated to scale quantum navigation solutions. As electronic warfare evolves and the use of autonomous systems expands, the ability to operate without a constant GPS signal is becoming a standard requirement for next-generation mobility and mission-critical platforms.
Collaboration focused on enabling plug-and-play, GPS-denied navigation capabilities for next-generation maritime platforms
Anello Photonics and Mythos AI are accelerating deployment of resilient, plug-and-play navigation solutions for the maritime sector. The collaboration brings together Anello’s advanced inertial sensing technology and Mythos AI’s intelligent autonomy software to address the growing need for resilient navigation in GPS-challenged environments.
Anello is creator of the Silicon Photonics Optical Gyroscope (SiPhOG). By combining SiPhOG-based inertial navigation with advanced sensor fusion and AI-driven collaborative autonomy, Anello and Mythos AI are delivering a fully integrated, plug-and-play solution that maintains performance when satellite signals are degraded or unavailable. It is designed to drop seamlessly into both next-generation and legacy maritime platforms. A multi-mission open systems architecture enables scalable deployment across defense, commercial and hybrid maritime operations.
Strategic focus on maritime autonomy and USVs
The initiative is particularly relevant to the rapidly evolving unmanned surface vehicle (USV) market. As USVs take on expanded roles in offshore energy, maritime security, hydrography, environmental monitoring and defense missions, complete end-to-end dependable navigation is essential to safe and effective operations.
A resilient, GPS-independent navigation capability enables:
greater operational assurance in GPS-denied or contested maritime environments
enhanced autonomy and mission continuity during signal disruptions
reduced integration complexity for OEMs and system integrators
scalability across a broad range of vessel sizes and mission profiles.
Anello and Mythos AI will collaborate with OEMs, integrators and end users to align the solution with evolving operational and regulatory demands.
Anello Photonics has launched the Anello Aerial inertial navigation system (INS), a compact, high-performance inertial navigation system built around the company’s Silicon Photonics Optical Gyroscope technology and integrated with multi-band GNSS receivers.
Anello made the announcement at CES 2026, taking place this week in Las Vegas.
The Anello Aerial INS is built for demanding aerial platforms — including BVLOS UAS, maritime/shipborne VTOL UAS, ISR/special-mission aircraft, heavy-lift and cargo drones, and other autonomous aerial vehicles. The system is powered by an advanced EKF-based sensor fusion engine and ANELLO flight-profile-tuned algorithms, consistently delivering >98% navigation accuracy without the need for cameras or fiber-optic cables.
The Anello Aerial INS delivers <0.5 deg/hr unaided heading drift, maintaining accurate navigation and control through high-dynamics and GNSS jamming, spoofing, or occlusion. Anello’s navigation solutions are built to deliver assured performance in fully GNSS-denied environments — whether operating over water or desert corridors, in night or low-light missions, or through fog and cloud cover — maintaining precise guidance without GPS and enhancing warfighters’ effectiveness and survivability.
“Customers flying real missions need resilient navigation when GPS isn’t reliable,” said Mario Paniccia, co-founder and CEO of Anello Photonics. “By combining our SiPhOGs with our airborne-optimized sensor-fusion algorithms and integrated multi-band GNSS, the Anello Aerial INS delivers accurate navigation solutions in a cost-effective SWaP-friendly package. This allows UAVs to hold course through GPS jamming, multipath, spoofing, or outages using only Anello without the need for cameras or fiber-optic cables and allows the warfighter to complete their mission safely and successfully.”
ANELLO’s full product portfolio has been developed in close collaboration with customers and verified through comprehensive integration and mission-platform testing.
The Anello Aerial INS is available for evaluation today with production shipments beginning in the second quarter of this year. Evaluation kits include the Anello Aerial INS, cabling, drivers for PX4/ArduPilot, and a quick-start integration guide.
Vatn Systems has released INStinct, an inertial navigation system (INS) designed to provide GPS-free navigation for maritime operations.
The defense technology company, which manufactures autonomous underwater vehicles (AUVs) for the U.S. military and commercial clients, said the system uses technology from ANELLO Photonics to deliver navigation capabilities in GPS-denied environments at lower cost than existing systems.
The system features a modular design that allows users to configure it based on mission requirements. It can be equipped with various inertial measurement units, including ANELLO’s X3 IMU, which uses Silicon Photonics Optical Gyroscope technology. The X3 IMU is designed to withstand shock and vibration in maritime conditions.
“Inertial navigation is the cornerstone of autonomy at sea,” said Nelson Mills, CEO and co-founder of Vatn Systems. “With INStinct, we’ve created a navigation solution that meets the needs of both our own vehicles and third-party platforms, offering reliability, accuracy, and adaptability. ANELLO’s IMU technology allows us to offer an INS with FOG performance at a fraction of the traditional cost. The launch of INStinct marks another milestone in our broader strategy to own the full tech stack for underwater vehicles.”
“The integration of our technology and our ANELLO X3 IMU into Vatn’s platforms and INS marks a pivotal advancement in our mission to transform autonomous underwater navigation,” said Dr. Mario Paniccia, CEO and co-founder of ANELLO Photonics.”Our technology has been rigorously field-tested across land, air, and sea environments, and we are thrilled to collaborate with Vatn to offer an underwater navigation solution. This partnership highlights our commitment to delivering next-generation navigation solutions that empower accurate and more efficient underwater operations.”
The system supports integration with Doppler velocity logs and includes maritime-specific algorithms. Housing configurations range from original equipment manufacturer specifications to depth-rated enclosures.
Vatn Systems said it plans to deliver vehicles equipped with INStinct to customers by the end of 2025.
For decades, GPS has been the cornerstone of modern navigation, guiding aircraft, vehicles, troops and commercial systems across the globe. As digital warfare intensifies, satellite signals are increasingly unreliable. From the battlefield to underground tunnels, to dense forests, and urban canyons, global positioning signals are being jammed, spoofed, or simply blocked by the environment. In these GPS-denied zones, the risks to navigation, targeting and mission success grow exponentially.
Without reliable positioning, systems lose their sense of location, direction and speed — making it impossible to navigate to their destination. Yet in modern warfare, autonomous systems and industrial automation depend on precise and continuous navigation. ANELLO Photonics is tackling this gap head-on with a breakthrough silicon photonics-based optical gyroscope (SiPhOG) technology — one that seeks to reshape how machines, soldiers and vehicles navigate across land, air and sea when satellites fall silent.
A Battlefield Blind Spot
In GPS-contested environments such as urban warzones, subterranean tunnels, dense forests or near hostile jamming equipment, traditional navigation solutions fail. Spoofing attacks can instantaneously displace autonomous vehicles by kilometers. Jamming can cripple UAVs mid-flight, causing them to crash. Even in civilian settings — especially in and around conflict zones — GPS signal loss can disrupt commercial fleets, emergency responders, and industries like mining or agriculture. These dropouts stall autonomous operations, reduce productivity, and increase the risk of severe damage.
These issues aren’t hypothetical. Adversaries have demonstrated sophisticated GPS interference capabilities that can mislead or immobilize multi-million-dollar defense assets. The need for self-contained, spoof-resistant navigation has never been more urgent.
Strategic-Grade Precision in a Chip
ANELLO Photonics took a radically new approach to building gyroscopes when it built its Silicon Photonics Optical Gyroscope (SiPhOG) using the same semiconductor processes used for integrated circuits. This breakthrough makes it possible to deliver high-precision optical navigation in a chip-scale form factor — smaller than a fingernail. The SiPhOG harnesses the proven Sagnac effect — central to traditional fiber-optic gyroscopes (FOGs) — but ANELLO has reimagined it using advanced silicon photonics, integrating this into a compact silicon photonic chip.
This innovation enables:
Bias drift < 0.5°/hr. A performance level previously only achieved by large, costly fiber-optic systems.
Nanoradian-scale angular sensitivity. Essential for accurate navigation over long durations.
Superior to MEMS. Resilient to vibration, thermal variation and EMI — ideal for combat zones and industrial environments.
Compact, coin-sized form factor. Easily integrates into existing systems and is small enough to be used for soldier-worn devices, embedded robotics and scalable mass-market applications.
The ANELLO SiPhOG offers the precision of strategic-grade FOG systems, but with the size, weight, power and cost suitable for widespread tactical deployment to the mass market. This balance makes it uniquely positioned to serve both high-end defense missions and cost-sensitive commercial markets.
The Full-Stack INS Advantage
SiPhOGs alone aren’t enough. ANELLO integrates its SiPhOGs with accelerometers, magnetometers, GPS (when available) and onboard CPU logic into a full-stack inertial navigation system (INS). Additionally, these systems use the ANELLO AI-based sensor-fusion engine to intelligently reconcile data, validate signal integrity and detect anomalies, such as jammed or spoofed GPS locations or signal dropouts across land, air and sea. The ANELLO AI sensor-fusion engine processes and tracks in real time the inertial position and GPS position every ~10 ms. The system auto-corrects and seamlessly transitions the sensor modes without any human intervention — always determining what is correct and what is false or being spoofed. The ANELLO AI sensor-fusion engine is continuously being tested and optimized by the ANELLO team with various customers in the field.
The result is a self-contained, intelligent navigation platform that maintains accurate heading, velocity and position — even in total GPS darkness. The modularity of the ANELLO systems also enables easy integration into various host platforms, from aerial drones to armored vehicles to autonomous boats and robots.
Field-Proven Resilience in Defense
During U.S. Department of Defense trials, ANELLO’s INS systems successfully identified and mitigated GPS spoofing attempts in real time. When a vehicle’s GPS feed suddenly shifted its perceived location by kilometers, ANELLO’s AI engine flagged the change as physically impossible, rejected the GPS input and seamlessly relied on ANELLO inertial data to maintain accurate positioning.
Such robustness makes the ANELLO technology suitable for:
UAVs operating in jammed or contested airspace
Autonomous Ground Vehicles (AGVs) navigating GPS-denied terrain • Marine systems facing jammed or spoofed GPS signals
Land vehicles such as emergency responders and even delivery vehicles
Handheld soldier systems that demand compact, rugged navigation capabilities for on-the-move operations.
Whether installed on armored vehicles, on drones, or embedded in next-gen infantry kits, ANELLO’s optical gyro-based solutions deliver location certainty when precision and accuracy matter.
Cross-Sector Use Cases
Autonomy Without Satellites: While defense remains a clear application, the broader commercial value is just as transformative. In agriculture, autonomous vehicles often lose GPS coverage under thick orchard canopies. In underground mines or port operations, satellites are blocked entirely. In these environments, ANELLO’s SiPhOG-powered INS continues to provide reliable localization and position, ensuring autonomous systems don’t stall, stray or crash.
Commercial applications for ANELLO’s SiPhOG technology include:
Autonomous mining vehicles. Enables self-driving trucks and loaders to navigate through tunnels and signal-blocked environments with precision and safety.
Port automation and crane systems. Supports operation of automated cranes and cargo movers in GNSS-challenged port environments for uninterrupted container handling and improved throughput.
Industrial robotics and logistics. Powers warehouse robots and inspection systems with high-precision navigation in indoor and metallic environments where GPS is unreliable or unavailable.
Autonomous maritime systems. Facilitates reliable navigation for unmanned surface vessels (USVs) and autonomous underwater vehicles (AUVs) operating in coastal, harbor, or fully submerged missions where satellite signals are compromised.
With rapid integration into commercial drones, robotic forklifts and construction fleets, ANELLO is extending military-grade navigation into everyday autonomy use cases.
Smarter Navigation in Real Time
At the heart of ANELLO’s platform is a sophisticated AI sensor fusion engine. Every 10 ms, the system ingests data from multiple sensors, validates physics-based plausibility and recalibrates its state estimates. This allows the system to detect and reject spoofed GPS signals, continue navigation autonomously through temporary GPS dropouts and identify signal degradation before failure occurs.
This intelligence is what makes the system robust, not just a fallback, but a fully capable primary navigation method in harsh and dynamic environments. It also significantly reduces the operational risk and support burden typically associated with traditional inertial systems.
Compact, Scalable, Mission-Ready
As conflicts evolve and global infrastructure expands into GPS-hostile regions, inertial systems must become smaller, smarter and more affordable. ANELLO is advancing a roadmap toward fully integrated, chip-scale INS platforms with gyros, lasers, processors and algorithms all on a single platform. This enables faster deployment in the field, lower system power consumption and broader adoption across vast use cases for military and industrial systems.
The company’s domestic chip fabrication capability also ensures supply chain security, an increasingly critical factor in national defense and industrial automation strategies. From soldier systems and UAVs to autonomous cargo vehicles and industrial robots, ANELLO’s technology is positioning itself as a cornerstone for resilient, GPS-independent autonomy.
Navigatng a Standard for a Contested World
The future of autonomous operations—military and civilian alike—will need to depend on navigation systems that do not falter when GPS disappears. With its SiPhOG-based inertial platform, ANELLO Photonics is offering not just a backup system, but a new standard: one that combines strategic-grade precision, compact design and AI-driven reliability that can be delivered to the mass market and installed into any vehicle or any moving platform.
In an era where signal denial is not just a threat but a tactic, assured positioning is no longer optional—it’s essential. ANELLO is redefining the future of navigation, empowering not just autonomous systems but also the people who rely on navigation to operate with confidence and precision — anywhere, anytime — even when the sky goes dark.
An early 1900s Italian folk song tells of a farmer walking into his fields at dawn to spread wheat seeds with his hand from a small bag.1 Farming has changed quite a bit since then. After remaining essentially unchanged for about 12 millennia, in the past century, it has been transformed by such innovations as tractors, electrification, chemical fertilizers and pesticides. In the 1990s, precision agriculture (PA) emerged. (This magazine produced a few supplements on the subject around 1999. If you still have any of them, please let me know.)
PA reduces inputs of water, fertilizer, seeds, pesticides and fuel and increases harvests by mapping variations in soil characteristics and plant health and then using those maps to adjust the inputs using variable rate technology on sprayers. It also ensures that no part of a field is sprayed twice or missed and greatly reduces overlap in seeding and tilling. Double spraying is costly and wasteful; missing a row when spraying pesticide can cause pests to concentrate there and then spread, nullifying a whole spraying operation.
The data for the maps are gathered from sensors on tractors and other farm machinery in the fields, as well as by aerial platforms — nowadays, mostly UAVs. GNSS receivers are essential in guiding the farm machinery. The required accuracy depends on the crop but is typically at the centimeter to decimeter level.
Increasingly, farm machinery also incorporates a variety of other sensors, both to compensate for GNSS outages and to minimize the risk of collisions, such as when a cow crosses the path of a tractor. To maintain navigation during GNSS outages, inertial navigation is used. For obstacle avoidance lidar, radar and stereo vision cameras are used to measure the distance to the object. (Both challenges — navigation in GNSS-denied areas and obstacle avoidance — and their solutions are very similar to those encountered with autonomous vehicles on roads.)
In-cab displays enable growers to monitor their progress in real time. They often also download the data and maps to a laptop to better identify missed spots or areas with special issues and to plan their next task.
Manufacturers of PA equipment compete in a global market. Some challenges are the same everywhere, while some are specific — such as strong ionospheric scintillations in Brazil or antiquated agricultural practices in Japan’s Furano region. For this year’s cover story on PA, I discussed these challenges and the latest generation of farming hardware, software and services with
■Kirstin Schauble, director of systems engineering, ANELLO Photonics
■ Joey Koebelen, founder and CEO, Deep Sand Technology
■ Chad Huedepohl, PA portfolio manager, autonomy and positioning division, Hexagon
■ Ken MacLeod, director of product management and Gordon Echlin, director of business development, Calian GNSS.
This article contains a few excerpts from those interviews. I also received case studies from AgLeader Technology, ComNav Technology and Harxon Corporation.
ANELLO Photonics makes silicon photonics optical gyroscopes, which enable accurate dead reckoning without GNSS and are targeted mostly at the autonomy market. (Anello means ring in Italian, which reflects the nature of the company’s technology and the Italian-American background of its CEO, Mario Paniccia.) Because ANELLO specializes in high precision in situations with obstructed GNSS signals, orchard cultivation is one of the agricultural practices in which it specializes. “Orchards have high-value crops, such as almonds or walnuts, and you’re driving your tractor between very narrow rows with trees completely covering the sky above you,” Schauble said. “Our job is to replace that GNSS input with our inertial navigation system (INS) input.”
Deep Sand Technology — in partnership with GEODNET, the largest real-time kinematic (RTK) network in the world — sells affordable RTK corrections to farmers. It also maintains and troubleshoots the system, compensated by the network’s cryptocurrency. “We handle the blockchain and use it for maintenance,” said Koebelen. “We have someone that checks every day and makes sure that the bases are up. We do the support on it. Instead of charging for that, we take the tokens; that’s just our part of the program, and they get free RTK.” Koebelen, who is also a peanut farmer, adds: “You can trust anything that we sell because it has been tested and used by a farmer and is supported by a farmer.”
Hexagon, a very large company, makes a wide range of sensors that capture and display data about physical reality. Its latest contributions to PA include the TerraStar-C PRO and the TerraStar-X Corn Belt corrections services, which incorporate improvements in ionospheric resiliency. “Especially in the Brazil market, some growers were often experiencing hours of downtime due to ionospheric scintillation,” said Huedepohl. “With the ionospheric enhancements that we’ve added, that downtime now is down to just a few minutes here and there.” He also cites safety enhancements for the autonomy market, such as dual antenna solutions and geofencing.
Calian GNSS is a global supplier of technical solutions, services and products to the space communications, defense, wired and terrestrial wireless, manufacturing, GNSS, agricultural technology and nuclear industries. The company’s recent entries in the PA market include GNSS antennas with lower elevation gain and extended filtering. “Our GNSS agriculture antennas support centimeter level precision, have best in class lower elevation angle gain enabling L-Band correction reception (at northern and southern latitudes), and have eXtended Filtering (XF), which creates very deep attenuation of nearby out of band radio frequency signals,” said Echlin. “Having a digital signal from the antenna to the smart ag controller simplifies and reduces the cost of the installation,” said MacLeod.
Ag Leader, founded in 1992 and focused exclusively on precision farming technology, offers a complete line of systems that integrate with existing farm machinery. In February, it introduced the RightPath passive implement steering solution to alleviate the problem of trailed implements drifting off the guidance line by up to 10 inches or more, even when farmers utilize auto steer and on flat ground. RightPath keeps implements centered on the guidance line, ensuring precise input placement and increasing operational efficiency throughout the growing season while minimizing crop damage, yield loss and operator challenges, Ag Leader said. To utilize RightPath, both the vehicle and the implement require Ag Leader’s GPS 7500, but only the vehicle needs to be equipped with TerraStar-C, TerraStar-X, or RTK. RightPath will be available in late fall 2025 through a single purchase unlock and without any recurring subscription fee.
ComNav Technology is an original equipment manufacturer (OEM) that develops and manufactures GNSS OEM boards, receivers and solutions for high-precision positioning applications worldwide. Japan’s Furano region is renowned for its vast farmland and abundant agricultural resources. Still, it is challenged by traditional manual driving methods that provide insufficient accuracy, low efficiency, and operator fatigue during prolonged tasks. To address these issues, ComNav introduced the AG502 autosteer system, which integrates satellite reception, positioning, navigation and autonomous driving. It is compatible with a variety of mainstream tractors on the market and is suitable for a wide range of agricultural tasks such as ridging, seeding, spraying and harvesting, ComNav said. In the Furano project, the AG502 demonstrated its versatility through its successful deployment on a transplanting machine.
Harxon Corporation makes GNSS positioning antenna solutions. The company has been collaborating with Brazilian agricultural navigation solutions and systems developer Agres to integrate Harxon’s Smart Antenna into the AgresAutopilot System. This secure and robust agricultural navigation solution has been widely adopted by Brazilian agribusinesses to provide automatic steering on straight or curved parallel lines to assist with such field operations as preparing the soil, planting seeds, cultivating the plantation and harvesting the crops. These systems are suitable for various brands and tractor/vehicle models such as Kuhn, John Deere, Valtra, Massey Ferguson, New Holland, LS, Landini, Jacto and others.
To maximize an operator’s turning accuracy and efficiency, Ag Leader introduced TurnPath, hands-free steering for automatic, repeatable end-of-row turns. (Photo: Ag Leader)
Challenges
The key technical challenges faced by PA systems include minimizing multipath and RF interference and monitoring the positions of implements relative to the tractor. “Agriculture requires positional accuracy, so mounting an antenna on a farm machine is not a trivial matter,” said MacLeod. “On metallic machinery, radio frequency surface currents and reflections (multipath) will degrade the antenna radiation pattern, and RF noise coming from other electronics on the machine can interfere with GNSS.” Additionally, because most GNSS applications now are full band, “the challenge is designing antennas that are small and full band, and which also reduce local multipath on the machine.”
Regarding the position of the implements, MacLeod said: “Many agricultural applications use the moving base technique to estimate a precise heading which can be used to monitor pass to pass overlap. Calian GNSS have smart antennas that support the moving base application.”
Accuracy and Reliability
Nearly all PA practices require RTK, which gives repeatable accuracy of 1 cm to 2 cm. “I have this conversation daily with farmers,” Koebelen said. “All crops or farm practices benefit from RTK, even if you’re just doing hay work — whether you’re planting or harvesting. We can’t control the weather, commodity prices, or fuel prices but we can reduce input costs. So even if you’re just tilling, GEODNET RTK will pay for itself and is better than using traditional autosteer, because you’re eliminating all overlap.”
Additionally, farmers need reliable repeatability, even from one season to the next, to be able to return to the same spot to harvest what they planted. “Peanut farmers may plant with RTX or SF3, but satellite-based corrections, even higher precision ones, didn’t provide them enough repeatability to come back to harvest,” said Koebelen. “So, they still had to adjust their lines or hand-drive them. If the spacing between passes are off by even two to three inches, you’re going to lose peanuts. That’s why peanut farmers — as well as growers of potatoes, cucumbers, and other crops — need RTK.”
Once they enter a GNSS-denied area, such as an orchard, farm machines will need a dead reckoning capability that can keep them within a 20 cm to 30 cm error, said Schauble. “This is typically posed as a cross-track error. Errors in the direction of the distance traveled are slightly less important, because you can tell based on visuals when you exit a row.”
Growers think of reliability, accuracy and repeatability in terms of whether they can count on a system to do what they are asking it to do, Huedepohl explained. “They think about all those things. They do not necessarily focus on one thing versus another.”
Retrofitting
While many agricultural systems are proprietary, there is also a lot of mixing-and-matching and retrofitting going on. More than 90% of new tractors come with factory-installed guidance, but some growers want to retrofit new receivers on their machines, either because they did not have them or to upgrade. On some machines, it is possible to feed better positioning data — for example, integrating GNSS and inertial navigation — into the port that previously took in only GNSS data, using a standard NMEA format.
“It’s a simple plug-and-play to exchange someone’s GNSS receiver with our INS solution. Obviously, they need to do some testing to optimize placement, installation and stuff like that,” said Schauble. “Many companies are retrofitting existing tractors with an autonomy stack. They take commercial off-the-shelf (COTS) systems, such as ours, or a lidar or a camera, and retrofit a tractor. That’s their business model.”
The AG502 autosteer system being tested and calibrated on a transplanter in Japan’s Furano region, which is renowned for its vast farmland. (Photo: ComNav Technology)
Additional Sensors
Among the additional sensors often used are wheel odometers. “Without the wheel speed, you’re relying heavily on accelerometers,” said Schauble. “Growers cannot afford to pay $100,000 for a reference-grade system. The navigation systems for these applications use MEMS accelerometers, as we do. So, wheel speed aiding is extremely important to maintain that distance traveled.”
Integrating GNSS and inertial measurement units (IMUs) has long been standard. Increasingly, this integration is done inside an antenna, called a smart antenna. Calian, among others, does that. “We also have smart antennas that employ the L1-L5 observation pair rather than L1-L2, since the L5 signal is stronger and performs better under cover,” said MacLeod. “L5 uses an enhanced signal architecture with 10x faster chipping rate (10.23 MHz) offering more precise standard localization and improved multipath mitigation for reflections exceeding 29.3 m.”
Corrections
Corrections have also been key to the evolution of PA. A reference base station can provide 1-inch accuracy for up to 21 miles, degrading beyond that distance. It needs a WiFi network to communicate, so farmers often place the base station near their home and connect it to their home network. “We haven’t found an internet connection that isn’t quick enough to handle that,” said Koebelen. “From there, you can use your hotspot with a SIM card on your phone, and it’s like texting, so it will not drop like with voice calls. We haven’t run across rural areas where cell coverage is the limiting factor.”
RTK adoption is growing among farmers. “In the past, many people did not want to use RTK, because it was not very affordable nor easy,” Koebelen said. “However, now that we have these networks [such as GEODNET], you’re going to see a lot more people rely on the precision of RTK and you’re going to see many new products come out. Right now, even John Deere, Trimble and other major brands that are more expensive are trying to make the tier below RTK more affordable or easier to get — for example, RTX, SF3, the satellite-based corrections.” GEODNET’s network is growing rapidly, he said, “because our price for RTK is lower than Trimble’s or John Deere’s basic entries, which use free satellite signals that drift throughout the day.”
Huedepohl agrees that RTK has improved while prices have dropped significantly. “Earlier in my career,” he said, “RTK positioning was very expensive and satellite-based augmentation systems (SBAS) were not as stable. Also, RTK systems and such used a single constellation for the longest time. We started adding in GLONASS and then positioning network (Ntrip) corrections, which gave us a lot more robustness.”
Precise point positioning (PPP) has also improved. It used to have convergence times of up to 45 minutes. “Then, you would drive underneath one tree on the edge of a field, and you had to start all over,” Huedepohl recalls. “That did not sit well with farmers, so PPP corrections struggled to take off. Because of those early experiences, it took a long time for the market to start to accept the newer PPP models that we’ve seen in the past seven or eight years. Now there are farmers who enjoy the reliability of those PPP corrections.” The convergence time for one of Hexagon’s PPP services, TerraStar-C PRO, is often less than five minutes, according to Huedepohl. “We have a fast startup time. So, if the tractor was shut down, already converged and you turn it back on, most people are going to be reconverged in just a minute or two.”
Harxon enables autonomous agricultural applications with GNSS antennas, smart antennas and wireless data radios. (Photo: Harxon)
Division of Labor
The division of labor between manufacturers of PA equipment depends, in part, on whether a system is a retrofit or built from scratch. “If you are, let’s say, John Deere, and you own the entire autonomy stack within this tractor, then you can take our INS solution, add cameras, maybe add a lidar, and you can have your own fusion of those sensors,” said Schauble. “We have our own sensor fusion with IMUs and GPS. The tractor’s autonomy stack can do the sensor fusion with our output and other visual sensors, such as cameras and lidars.”
“Dealerships want their tractors to be known as having the highest tech,” said Schauble. “For a dealership to offer our state of the art, autonomy-enabling technology would be a huge benefit to them.”
Another differentiator is whether a factory-installed system is an OEM or branded. “We’ve been providing NovAtel branded receivers to AGCO for many years, through their channel, both factory-installed and aftermarket. Some of the others, such as CNH, are white labeled, so it would just say ‘Case-IH’ or ‘New Holland’ and have no Hexagon markings.”
Whether OEM or aftermarket, most manufacturers have some type of proprietary integration. “There are products that are just NEMA; they are typically at the lower end and priced much lower,” said Huedepohl. “The higher performing flagship products out of everybody’s portfolio are usually doing a more customized integration.”
Echlin has a similar perspective: “We provide products to OEMs who designed our products into their machinery. There are also system integrators and aftermarket system providers that use our smart antennas.”
According to Harxon, one reason for the success of its smart antenna in the agriculture market, especially for autonomy users, has been its ease of integration and high performance. “GNSS positioning is just one part of an autonomous system, and the autonomous integrators don’t necessarily have resources or expertise to develop an OEM component portfolio. Therefore, it’s a timesaving and cost-effective choice to directly integrate a smart antenna into an autonomous system.”
1 “Di buon mattino il contadino va nei suoi campi a seminare il grano. Ha un sacchettino e ci tuffa la mano.”
An exclusive interview with Kirstin Schauble, Director of Systems Engineering at ANELLO Photonics. Read the full story and additional exclusive interviews here.
What crops are we talking about? What positional accuracy do they require? What accuracy can you achieve?
Where ANELLO has been of use in agriculture, typically we’re talking about orchards or dairy farms, because these are the use cases where you have limited open sky view, or, in some cases, no open sky view. For the orchard case, you have high-value crops, such as almonds or walnuts, where you’re driving your tractor in between these very narrow rows with trees completely covering the sky above you. So, in this case, there’s hardly any GPS availability and certainly no RTK-level GPS, which poses a challenge for autonomy in these types of agriculture environments.
Some of the stricter position requirements are on the order of 20 cm to 30 cm, which is approaching RTK-level accuracy. You can’t achieve this with just standard GPS, even under open sky. In those cases, you really need RTK-level GPS and open skies before you enter the orchard’s GNSS-denied area. As you know, RTK gives you 2 cm accuracy.
Then you need to have a dead reckoning capability that can keep you within a 20 cm to 30 cm error. This is typically posed as a cross-track error. Errors in the direction of the distance traveled are slightly less important because you can tell based on visuals when you exit a row. However, while you’re in the row, you don’t want to run into a tree, so that cross-track error is important.
Plus, you can use wheel odometry for the direction of travel.
Yep, exactly. We also found a lot of success in those cases where you have our optical gyro technology plus the wheel speed odometry. Without the wheel speed, you’re relying heavily on accelerometers. Growers need small and cheap systems. They cannot afford to pay $100,000 for a reference-grade system. So, they are probably going to use MEMS accelerometers, which is what we use.
So, wheel speed aiding is extremely important to maintain that distance traveled.
So, the positional accuracy requirement is typically 20 cm to 30 cm and you can achieve that with your system.
Correct.
How much does your application cost? Is it installed at the factory, at the dealership, or by the grower? What’s the learning curve for the grower?
Our main innovation has been in the gyroscope space. Early on in our development of silicon photonics optical gyros, we realized that the main use for them is in navigation for autonomous platforms — such as cars, UAVs, and autonomous boats. Our gyro isn’t something that we can just sell into a market like agriculture on its own. Tractors typically just have a GPS input, then the autosteering system takes care of the rest.
So, our job is to replace that GPS input with our INS input. It uses GPS under perfect open sky. However, when you don’t have those conditions, it integrates the optical gyro and performs high-end dead reckoning, also using the wheel speed odometry, and our advanced sensor fusion engine. We have put years of pretty smart brains towards getting that engine fine-tuned, specifically for the high-end gyro that we have.
It’s very difficult to be an algorithm engineer where you have just a MEMS gyro, MEMS accelerometers, and no real speed data. There’s not much you can do with that. But if you have the high performance of optical gyroscope technology, it enables you, as an algorithm engineer, to dead reckon very accurately without GPS. Then you integrate all that and feed it into the GNSS input on the auto steer system.
Who does that integration?
We do all the inertial measurements internal to our system. We read in the wheel speed. We do all the sensor fusion with GPS. Then, we output the tractor’s position, which is far more accurate than it would be just using GPS. So, we do everything that a typical GPS receiver would do, and we send out a position, velocity and attitude.
Who does the integration depends on whether it is a retrofit or built from scratch. If you are, let’s say, John Deere, and you own the entire autonomy stack within this tractor, then you can take our input, add cameras, maybe add a lidar, and you can have your own fusion of those sensors. We have our own sensor fusion with inertial measurement units and GPS. The tractor’s autonomy stack can do the sensor fusion with our output and other visual sensors, such as cameras and lidars. That’s typically what a full autonomy stack might look like.
However, some farmers just have standard, manually driven tractors but want to know where their workers are and want to document exactly which rows were sprayed, because if you skip a row pests can find their home in those trees and then spread from there. So, if you miss a row, it’s as if you had not sprayed the entire acre or the entire orchard. It’s pretty high stakes.
Also, they often drive at night. It’s a difficult job. They might have to go refuel, then come back and start on the wrong row.
The distance between rows is going to be a lot more than 30 cm, so you don’t need that accuracy to identify a row.
Totally. I’m getting into the autonomy use case, for which you need that 20 cm to 30 cm accuracy.
For the documentation use case — where you just retrofit a tractor with our technology — all this data is saved, then maybe they download the file to their laptop and see exactly which rows were sprayed. Maybe they see that a few rows were missed, so they can go back and spray them the next morning. We found that human error, such as missing a row or double-spraying one, is a big problem. It is true that, for that purpose, you don’t need 20 cm to 30 cm accuracy, but you’d really like to have at least 1 m to 2 m accuracy, which you would not get under heavy canopies without some sort of dead reckoning.
So, you feed the position, speed, and attitude from your integration into the pre-existing input that was made to receive a signal from a GNSS receiver?
Yeah, that’s exactly right.
Is it standard NEMA messages?
Many of these autonomy systems are basically hard coded to accept these messages straight from a GPS source. We put our inertial solution into these messages so that they can be easily ingested by pretty much any autonomy stack that would be using GPS. It’s a simple plug-and-play to exchange someone’s GPS receiver with our INS solution. Obviously, they need to do some testing to optimize placement, installation and stuff like that, but in terms of interfacing, it’s a plug-and-play switch.
You just used the pronoun “they.” So, who is “they”? Do you have privileged relationships with some of the large manufacturers, such as John Deere? Do you sell your box to dealerships, who then sell it to farmers? Or can farmers order it directly from you and plug it in?
Great question. Unfortunately, I can’t give names of customers, but typically the earliest entryway into this market is companies that can easily adopt new technology and who are innovating very heavily in the autonomy and ag space. There are several players in that arena and we’ve found a lot of success there. Many companies are retrofitting existing tractors with an autonomy stack. There are companies that do retrofitting. They take commercial-off-the-shelf (COTS) systems such as ours, or a lidar or a camera, and retrofit a tractor. That’s the business model for some companies.
Others are building, completely from scratch, an autonomous robot that is performing certain tasks, such as spraying or harvesting inside an orchard.
In both of those cases, those who buy your products are integrators who build and sell systems, not dealers or end users.
Yes, they either build systems or retrofit tractors. The dealership is a very good option, because the manufacturers of these tractors have skin in the game for staying ahead on autonomy. They want their tractors to be known as having the highest tech. So, for a dealership to offer our state of the art, autonomy-enabling technology would be a huge benefit to the company.
We have field applications engineers involved — either training dealerships to retrofit or with the integration. So, we might be involved in that integration. So far, however, the earliest market for that has been with companies that are integrators themselves.
When you’re talking about autonomy, are you talking about totally autonomous machines that roam the fields without a driver in the seat or about steering tractors that still have drivers to monitor them and can intervene as needed?
My understanding of how autonomy transforms an agricultural machine is that you start with manual drivers and then move toward autonomy. It is similar to the addition of advanced driver assistance systems (ADAS) to passenger vehicles. Eventually, you have no driver.
I would imagine that farmers who own a tractor and are trying to retrofit — or, maybe, a company like John Deere that sells tractors — might start off with an autonomous tractor that still has a steering wheel and a seat but eventually could just drive itself, once that trust is gained. Trust is the key word. For many of these farmers, it’s hard to go from everything being completely manual and in their control to fully trusting autonomy.
In some cases, that trust can be gained through full testing, over and over again, and continuous improvements. It’s possible for a farmer to go from fully manual to fully autonomous immediately, but I imagine that there’s a transition period during which tractor manufacturers are still adding steering wheels while also integrating more and more autonomy in their tractor systems.
In the agricultural environment, besides INS, which sensors — such as radar, lidar, cameras, and odometers — are most useful? For example, for obstacle detection.
Besides knowing where you are, the most important thing in autonomy is obstacle detection. If a dog runs into the orchard, you want to be able to stop. You can do this with either lidar or radar, which are both depth sensors.
Cameras, plus AI, enable you to identify objects.
You would want a stereo vision camera, so that you can tell the how far the object is. Every company has a different approach to this. Ideally, you have every sensor, but it’s a cost of computation tradeoff. Everyone takes that tradeoff differently, but it’s some combination of cameras, lidars, and radars.
Do you integrate other sensors — such as lidar or cameras — with your inertial systems?
We just do the inertial navigation part and the others integrate.
Every time you acquire the GNSS signals after an occultation, such as under heavy canopy, you re-initialize the INS, correct?
When you start up the system, to know where you are you need to have GPS signals. So, the best scenario would be to start up the system under open sky. However, we’ve found through working with our customers that this isn’t always the case. An autonomous tractor might just stop spraying for the night in the middle of a row and continue its mission the next day. So, they sometimes need to start up under heavy canopy, which means that they wouldn’t be able to acquire GPS signals, at least not accurate enough. In that scenario, we’ve added a functionality to boot up with your last position. What customers often do with this feature is to constantly save their last position and heading from our system; then, as soon as the system boots up, they can decide whether to start from their last known position.
We leave that up to the customer, because there are some cases in which you might boot down the system and then boot it up and it’s somewhere else — for example, often an autonomous tractor will get towed to move it a long distance. If we just always booted it up with its last position that would cause issues in those scenarios.
So, there are always these edge cases. That’s why we have this feature where the system itself will determine whether to boot up with its last known position or with GPS.
Hopefully, that will become standard soon for car navigation, so that when you start driving from a parking space the system already knows which way you are facing and will guide you accordingly — rather than you having a 50/50 chance of starting out in the right direction!
ANELLO Photonics has received a Phase I Small Business Innovation Research (SBIR) contract from the U.S. Navy. The six-month contract will allow ANELLO to demonstrate its optical gyroscope and sensor fusion technologies for navigation without relying on GPS.
Under the contract, the U.S. Navy will evaluate ANELLO’s integrated photonics technology and AI-based sensor fusion engine. These technologies aim to maintain accurate navigation in challenging environments where GPS signals may be unavailable or compromised.
ANELLO Photonics’ technology can be used for construction, agriculture, transportation, robotics, unmanned vehicles and national security. The company’s focus on navigation solutions for GPS-challenged scenarios aligns with growing needs in both military and civilian domains for reliable positioning systems in diverse environments.
ANELLO Photonics has introduced its Maritime inertial navigation system (INS). The system integrates ANELLO’s Silicon Photonic Optical Gyroscope (SiPhOG) technology with an advanced sensor fusion engine, offering high-precision navigation for autonomous surface and underwater vessels.
The ANELLO Maritime INS combines optical gyroscope performance and silicon photonics technology, resulting in a compact, low-power consumption device designed for GPS-challenged environments. Its capabilities include reference-grade position, velocity and attitude data output at 100Hz, and a high-precision three-axis SiPhOG with less than 0.5°/hr unaided heading drift.
This system incorporates dual triple-frequency GNSS receivers with static heading capability and an AI-powered sensor fusion engine with GNSS spoofing detection. The INS provides accurate dead reckoning and is designed to withstand harsh maritime conditions, being waterproof and resistant to corrosion, salt spray, and chemicals. The system’s applications extend beyond maritime use, with potential benefits for industries such as construction, agriculture, robotics and defense.
Transportation continues to be a key application area for GNSS and related technologies — both directly, as with receivers on trains, and indirectly, as in airport construction. For this month’s cover story, I chose three transportation-related projects that showcase different aspects of this relationship:
The project to triple the size of the international airport in Lima, Peru, and transform it into the Jorge Chávez Airport City. I posed a few questions to Carlos Ruiz Miranda, chief surveyor at the Lima airport project with SACYR, a Madrid-based global concessions, engineering and infrastructure and services company that specializes in large-scale infrastructure projects.
A train safety project in Vélizy, France. I talked with Joel Korsakissok, president of Syntony GNSS, a French company, which partnered for this project with Hitachi Rail, a global company headquartered in London.
A navigation test on San Francisco’s Market Street using an INS-GNSS integration from ANELLO Photonics, which specializes in silicon photonics and sensory technology. I spoke to Kirstin Schauble, Ph.D., director of systems engineering.
Trimble: Peru builds South America’s first airport city
A construction worker at Lima’s airport uses a Trimble GNSS receiver and a TSC7 controller. Requirements included precisely positioning the bolts for more than 700 seismic isolators. (Photo: Trimble)
On April 3, 2023, the first commercial plane took off from a new 2.2 mile-long runway at the Jorge Chávez International Airport, in Lima, Peru, headed for Tarapoto with 140 passengers. That same day, a Peruvian Air Force jet was the first aircraft to land on the runway. Both aircraft were monitored from a new 213 ft.-high control tower with a 360° view of the airport.
The new infrastructure is part of a larger $2 billion project to triple the size of the airport, turning it into Jorge Chávez Airport City. Additionally, third-party investment for the construction will exceed $400 million in the first phase. The continent’s first such venture, it will enable Peru to become one of its principal aviation hubs. Spanning 2,310 acres, in addition to the new runway and control tower, it includes a 67-acre passenger terminal designed to handle about 40 million passengers a year.
Construction began in January 2022, and the expanded airport is scheduled to open in January 2025. It is a joint project of Lima Airport Partners — which operates more than 30 airports around the world — the Peruvian Ministry of Transportation and Communications, the Peruvian Airports and Commercial Aviation Corporation, and the aviation community in general, under the supervision of Ositran.
The modernization project’s scope and scale are matched by the means and methods used to build it. They include advanced surveying, grade control and coordination techniques in the field and about 2,700 active building information models (BIM) containing more than 50 miles of utilities that multiple contractors will construct. To fully synchronize the digital workflow between the field and the office, Ruiz led the transition from cloud-based collaboration software to a digital workflow. This improved coordination and productivity across departments and helped to keep the project on track.
The transition began by implementing a cloud-based common data environment (CDE), using Trimble Connect to provide a real-time, centralized collaboration platform for the construction crew, the field surveyors and the project’s managers. The CDE became a hub for managing data from field solutions, including laser scanners, UAVs, grade control systems, total stations, GNSS receivers and machine control systems on heavy earthmoving equipment.
A critical part of the terminal expansion is the airside airplane parking area around the terminal, which requires about 70,000 cubic meters of concrete and asphalt. The systems developed by the construction team enable the paving crew to achieve 10 mm accuracy, well below the 18 mm requirements.
Given the number of elements to this project in the terminal and surrounding areas, the SACYR survey team found that one of the best ways to facilitate the data flow between the office and the field is to use augmented reality (AR). “Initially, we tried using paper printouts to manually check for issues in the field. We tried Google Earth, but that was not satisfactory,” said Ruiz. Instead, SACYR turned to Trimble’s SiteVision AR software to provide real-time visualization of data, which improved decision-making and planning and reduced errors and costs.
Nearly 20 Trimble solutions were used in this project (see the sidebar), which helped to synchronize communication between field and office during construction, provided high accuracy results, and improved visualization and collaboration with the customer.
An aerial image shows the new terminal at Lima’s airport under construction. It will be able to handle up to 40 million passengers a year. (Photo: Trimble)
I asked Ruiz a few questions about the GNSS part of the project.
Q: What were the key challenges in surveying for this airport expansion project? Given the nature of the project and its location, multipath was probably not a problem. Also, the new runway and control tower were built away from existing air traffic, so that presumably was not a problem either.
A: The challenge has been organizing workflows between the field and the office. The location was not an issue for the project, but the limited space between the existing runway and the new one was. Nevertheless, it was not really an issue for construction.
Q: The airport will be the first one in South America to have seismic isolators to allow it to serve humanitarian flights following an earthquake. Did that pose any special challenges for surveyors?
A: Yes, it was a challenge for surveyors because there are more than 700 seismic isolators, and they each have anchor bolts that have precise tolerances to be embedded in the concrete. For this they used Trimble total stations.
Q: Did this project have any special requirements?
A: Special requirements were the precision of the seismic isolators, the precision of the plumbness of the columns and beams, and the precision of the leveling of the concrete of the parking spaces and the asphalt for the aircraft.
Q: What total stations were used?
A: A S5 1 second with TDC600, software access, a UHF 35Watt GPS data radio, and different GNSS receiver models for the project.
Q: The airport expansion is part of Lima’s new airport city. How was surveying for the former tied into the latter?
A: The benchmark control points certified by the Peruvian IGN will be left in place and become part of the LAP airport geodetic network.
Autonomous railway track detection
Redundant ssm receiver installation inside a test train in France. (Photo: Hitachi Rail and Syntony GNSS)
Around the world, efforts are underway to increase the safety of rail transportation — both for passengers and for communities along rail lines that are vulnerable to derailments that can lead to spills of harmful chemicals. The most notable recent example of the latter in the United States was the derailment of 38 cars of a freight train in East Palestine, Ohio, in February 2023, which forced the evacuation of a 1-mile radius around the spill.
Hitachi Rail and Syntony GNSS are collaborating on a train safety project in Vélizy, France. Members of the Hitachi Rail team wrote a paper1 on the project that they presented at the Institute of Navigation’s GNSS+ 2024 conference in Baltimore in September 2024. “Everybody is now trying to locate trains with the highest possible Safety Integrity Level (SIL), which is SIL 4,” said Korsakissok, discussing the project. “The partnership between Hitachi Rail and Syntony aims to reach this level by the end of 2025.”
Many modern automatic train operation (ATO) systems — an advanced technology that enables trains to run automatically without the need for a human driver — provide real-time information to the train about its location, speed and other important operational parameters. They use small radio beacons placed along the railway track, typically every third of a mile to half a mile, and an onboard antenna to collect the data. The problem with this positioning system is that it has high installation and maintenance costs. Therefore, the use of GNSS is seen as a major step toward train autonomy. However, due to local disturbances (masking and multipath), classical GNSS positioning methods can be inaccurate by up to many meters, which does not meet railway safety requirements.
The Hitachi Rail safety project in Vélizy is part of a global next-generation train positioning architecture. It supplements a stand-alone GNSS positioning solution with a satellite signal map matching technique and derived integrity methods. It uses cold start for track detection and requires neither motion nor a priori knowledge of the train’s position. The GNSS receiver used in this project is from Syntony GNSS.
A satellite signal map matching (SSM) algorithm developed for this project, in combination with accurate maps, computes the correlation between the received GNSS signal and a predicted PRN code for a chosen satellite, chosen epochs and a known georeferenced point from the map. In the absence of any errors, the user’s antenna would be expected to be located at the georeferenced point. However, this matching is never perfect, so the technique evaluates its quality based on its degree of correlation and the observed delays. It then uses several consolidation methods that take advantage of the whole set of available satellites.
“This approach is well suited to the track detection case of railway navigation when no previous knowledge of the position is given (at train cold start), as the algorithm is detecting a known position, while most of the current GNSS algorithms are estimating a position,” write the authors of the ION paper on the project, who are all members of the Hitachi Rail innovation team in Vélizy.
“The receiver embedded in the train is based on Syntony’s ORION receiver platform,” Korsakissok said. “ORION is a hardware platform that includes a system-on-chip (SoC) from Xilinx, inside which we put a GNSS software-defined radio (SDR) receiver that tracks the GPS L1/L5 and Galileo E1/E5a signals.” For Hitachi, Korsakissok continued, Syntony added a “map matching” feature to the receiver, “which is done in an original (and patented) way: All along the rail tracks, we define some ‘points of interest’ (POI) and the objective of the SSM algorithm is to detect the probability of going over one POI at a given time. Obviously, if there is only one track, and if the train goes from one station to the next, we know that it will pass over this POI, and the only question is when. Inversely, if there are two or more tracks, the most important question is on which track the train is, to avoid any collision. In this case, we define a set of POI on each track, and the key is for our SSM algorithm to tell us which one the train passed.”
The autonomous location software (ALS) used for this project runs on an industrial-grade computer approved for railway usage. Running tests are done in a lab with an antenna located both on the roof of the team’s building in Vélizy and on the train. A grid map from true line tracks is used in both cases.
“To our knowledge,” Korsakissok explained, “almost all train operators that are locating trains with GNSS for positive train control (PTC) or for the European Rail Traffic Management System (ERTMS) are solving this problem by measuring the distance between the position computed by the receiver and all present tracks, then choosing the lower one as the most probable. This can work well if the train is moving and if a hybridization algorithm is used with an inertial navigation system (INS) and odometry. However, it does not solve the so-called ‘cold start’ problem — which is that you cannot use the train’s last known position as the new starting point because it could have been moved without powering up its electronics. The SSM algorithm solves this issue, because it directly correlates each satellite signal that should be received if the receiver were exactly at the position of the targeted POI. This correlation algorithm will have a very strong peak as soon as the antenna is near the correct position. This method has been simulated and tested on real tracks and has shown very good and significant results.”
Once the project achieves SIL 4 — a milestone scheduled for late 2025 — Hitachi Rail will embed the receiver designed and manufactured by Syntony GNSS in its future lines and trains.
Inertial-assisted navigation in an urban canyon
San Francisco’s market street, like all urban canyons, is a very challenging environment for satellite navigation. (Photo: Spondylolithesis / iStock / Getty Images Plus / Getty Images)
Urban canyons — city streets lined with tall buildings on both sides — present two challenges to GNSS: a limited view of the sky, thus a reduced number of satellites in view and a higher positional dilution of precision (PDOP) than under open sky, and multipath, as signals bounce off the vertical faces of the buildings before reaching receivers on the ground. This greatly complicates the tasks of accurate positioning and navigation — which is especially important for vehicles in congested city traffic, where it is essential that they do not stray from their lane.
Hundreds of research papers on possible solutions to the challenge of urban canyons have been presented at satellite navigation conferences over the years. One standard way to compensate for both a reduced number of satellites in view and multipath is to couple a GNSS receiver with an INS. GNSS and INS are inherently complementary technologies.
An INS consists essentially of an inertial measurement unit (IMU) and a computer. An IMU measures an object’s linear acceleration (typically, with three orthogonally mounted accelerometers) and angular velocity (typically, with three orthogonally mounted gyroscopes) in three axes. Because an IMU requires no external inputs, it can operate in tunnels, inside buildings and underwater, and is unaffected by such vagaries of the radiofrequency environment as jamming and spoofing. An INS integrates IMU data to compute positions that are very stable epoch to epoch. However, all inertial systems accumulate measurement errors, an effect known as drift, and therefore must be periodically re-initialized.
Conversely, GNSS-based navigation systems offer consistent absolute positioning accuracy, but their performance is severely degraded by a restricted view of the sky and multipath, two conditions characteristic of urban canyons, as well as RF interference (jamming and spoofing) and ionospheric disturbances.
Therefore, GNSS and INS, when coupled, assist each other beautifully: The INS takes over when the performance of the GNSS receiver is degraded or entirely impeded, then the latter re-initializes the former once it returns to full operation.
An INS provides another benefit for vehicle navigation. In addition to providing data about a vehicle’s trajectory, it also measures its attitude (roll, pitch and yaw), thereby enabling the software to better correlate and interpret the data from the other sensors. For example, when a car breaks sharply, its front end goes down and any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface. An INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and that in which the vehicle is pointing (true heading). A slip angle as small as 0.5° can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks.
A recent test in one famous urban canyon proved once again the value of GNSS-INS integration.
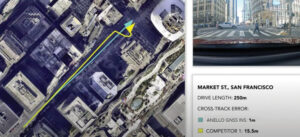
Market Street in San Francisco is one of the major routes across the city, with a diverse urban landscape. It poses numerous challenges in effectively navigating vehicles, especially autonomous ones, due to narrow streets with skyscrapers, resulting in limited sky view and severe multipath. ANELLO tested its GNSS INS here and evaluated the system’s performance in real-world driving conditions compared to other established inertial navigation systems solutions on the market.
Anello’s GNSS INS remains accurate despite multipath and a limited view of the sky. (Photo: ANELLO Photonics)
Market Street is a 3.5-mile urban artery that winds through diverse neighborhoods and commercial zones, presenting a formidable challenge for vehicle navigation as much due to its bustling traffic as for its towering urban canyons. The ANELLO GNSS INS addresses this complex environment by integrating data from its optical gyroscope with those from a GNSS receiver and wheel speed odometers using its sensor fusion engine and unique optical gyroscope technology. In addition to autonomous vehicles, it is also a good solution for agriculture, robotics, construction, trucking, mapping/surveying and defense applications.
To evaluate the performance of its GNSS INS, ANELLO installed it on a test vehicle together with a comparable system made by a different company. The ANELLO team then conducted multiple drives along Market Street, focusing its assessment on the system’s overall heading and positional accuracy. According to ANELLO, the system maintained a close alignment with the vehicle’s actual position along the entire route with a drift of about 1 m on multiple occasions, “significantly outperforming its competitor’s drift rates of 15.5 m, over a drive length of 250 m.”
“The interplay between GNSS and INS is like a tightly choreographed dance,” said Schauble, “where the choreographer is a sensor fusion algorithm. This algorithm continuously evaluates the quality of the GNSS and IMU measurements, assigning weights to each based on their reliability and accuracy.”
The accuracy of an INS is inherently dependent on the quality of its IMU. “When an INS system containing a MEMS IMU is used in an urban canyon, the algorithm is forced to either lean more heavily on the degraded GNSS measurements or accept the noisy and biased IMU measurements,” Schauble pointed out. “This often results in a poor and unpredictable solution in such environments. On the other hand, ANELLO’s GNSS INS leverages a silicon photonics optical gyroscope (SiPhOG) that provides significantly better bias and noise compared to MEMS IMUs. This makes the algorithms less vulnerable to degraded GNSS and multipath effects, allowing the INS solution to maintain accurate positioning in an urban canyon.”
ANELLO Photonics has successfully closed its Series B funding round to advance the development of its silicon photonic optical gyroscope (SiPhOG) technology for navigation in GPS-denied environments.
This funding round was co-led by Lockheed Martin, Catapult Ventures and One Madison Group, with participation from several other investors, including New Legacy, Build Collective, Trousdale Ventures, In-Q-Tel (IQT), K2 Access Fund, Purdue Strategic Ventures, Santuri Ventures, Handshake Ventures, Irongate Capital and Mana Ventures.
ANELLO’s SiPhOG technology integrates high-precision optical fiber gyro performance onto a silicon photonics platform. This innovative solution boasts a low drift rate of less than 0.5° per hour, a compact size comparable to a golf ball, and low power consumption. Additionally, it is designed to withstand shock and vibration while remaining cost-effective compared to traditional fiber-optic gyroscopes.
The technology is tailored for various autonomous applications across multiple sectors, such as land vehicles, UAVs, underwater vehicles, construction and agriculture equipment.
In the context of defense and national security systems, ANELLO’s solutions have demonstrated impressive performance in GPS-denied environments. According to the company, the system can navigate 100 km with less than 100 m of lateral error without relying on GPS and maintains accuracy within 0.1 m over distances of 0.8 km in orchard environments where GPS signals are limited.
ANELLO’s SiPhOG technology aims to bridge the gap between high-performance, expensive sensors such as fiber-optic and ring laser gyros and low-cost, less precise MEMS gyros. This strategic positioning addresses the increasing demand for cost-effective yet high-performance navigation sensors in the expanding autonomous navigation market.
The funding is anticipated to enhance ANELLO’s manufacturing capabilities and product development to meet its goal of delivering reliable navigation solutions for environments where GPS signals are weak or unavailable. These environments include construction sites, agricultural fields, trucking operations, robotics, unmanned aerial and underwater vehicles, autonomous vehicles, as well as defense and national security applications.
SpaceWERX, the innovation arm of the U.S. Space Force, has awarded ANELLO Photonics a Small Business Innovation Research (SBIR) Phase I contract to develop a resonator laser gyroscope. The new gyroscope seeks to address critical challenges faced by the Department of the Air Force (DAF).
By leveraging its expertise in integrated photonics and artificial intelligence (AI) based solutions, ANELLO aims to support the Space Force’s mission of providing capabilities to joint forces operating in GPS-challenged environments.
This contract is part of a broader initiative by the Air Force Research Laboratory and SpaceWERX to streamline the SBIR and Small Business Technology Transfer (STTR) processes. The initiative focuses on accelerating proposal-to-award timelines, expanding opportunities for small businesses, reducing bureaucratic overhead and implementing continuous process improvements. Enhancing these processes aims to foster advancements and versatility within the defense sector to overcome GPS-challenged environments.