Modeling and simulation, two separate but related activities conducted prior to flight tests of high-performance military navigation systems, can reduce costs, shorten timelines, and remove some uncontrollable variables from the process, to deliver more accurate, verifiable results.
Flight tests on an outdoor range provide engineers with an abundance of data to improve performance of weapon navigation systems. Whether the guidance package is hosted on a fighter jet, a cruise missile, an artillery shell, or a hypersonic kill vehicle, the navigation performance of a weapon during flight trials closely reflects its suitability for combat. The roar of jet engines, the percussion of a gun barrel, live video feeds, or a radio link to the cockpit can make live flight tests exciting — and sometimes unpredictable.
While these activities are critical for weapon system qualification and validation, live tests nonetheless have significant limitations. Lengthy flight trials can be quite expensive. The rising price of aircraft fuel combined with test-range costs, travel expenses and data analysis can easily exceed millions of dollars for extended operational test and evaluation (OT&E). Also, test results can vary widely between trials due to a number of uncontrolled variables such as flight dynamics, RF interference, and atmospheric effects. Finally, the tests themselves often involve safety and technical risks and usually require careful planning and coordination, often months in advance.
 |
For these and other reasons, military navigation system flight tests are generally limited in number and are preceded by extensive modeling and simulation in the lab, where a methodical and disciplined test approach can produce substantial savings and more detailed insight. Successful completion of these activities provides system developers and integrators with the confidence required to proceed to the next stage of testing. This phased approach is useful for a broad range of weapon systems including GPS-guided ground-, sea- and air-launched munitions; high-performance aircraft; and long-range interceptors.
Model, Then Simulate. Evaluating weapon navigation systems in the lab prior to outdoor testing usually consists of two sequential activities. First, performance of the GPS/inertial navigation system (INS) throughout the flight trajectory is modeled in software using representative data for the satellite constellation, RF signal environment, body masking, antenna pattern, receiver processing algorithms, and other parameters.
Second, the GPS/INS flight hardware is exercised with controlled inputs to collect data relating to the operation of its code- and carrier-tracking loops, its susceptibility to interference, and the performance of the navigation filter under simulated highly dynamic conditions. Changes in vehicle velocity along its three axes are represented by inertial delta-V (ΔV) terms that are delivered to the INS navigation filter, while changes in attitude are delivered as delta-q (Δθ) terms. For normal flight operations, accelerometer and gyro sensors within the INS measure and report these forces, but in test mode the inertial simulator PC generates these terms based on translational and rotational motion described within the simulated trajectory. Computing these terms involves mathematical translation between the sensor frame and the vehicle body frame, and includes all errors due to sensor bias, drift, and misalignment. The inertial simulator PC delivers these terms to the INS via appropriate electrical interface.
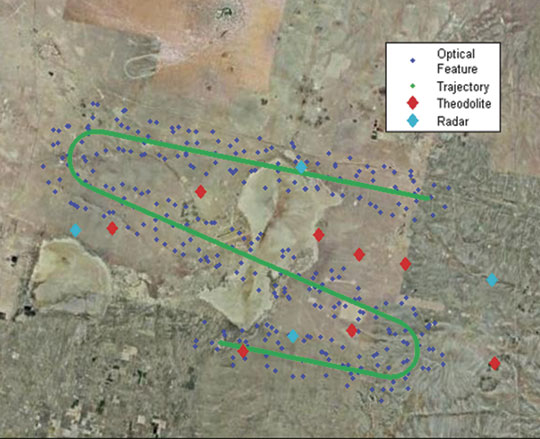
The fighter aircraft flight discussed here is based on a flight model overlaid on a map of the Fort Worth, Texas, area (FIGURE 1).

Figure 1 Simulated tactical fighter aircraft flight trajectory over north Texas |
Mod/Sim Process
Before discussing the simulation results, it’s important to understand modeling and data analysis in its proper context. Disciplined performance analysis is like the scientific method — it begins before the test is initiated and concludes by validating preliminary assumptions using results of the experiment.
Analysis of military navigation system performance begins with software modeling as shown in FIGURE 2, first panel. In this example, software tools predicted, among other things, SV carrier-to-noise values; azimuth and elevation angles; constellation dilution of precision (DOP) values; and GPS receiver acquisition/tracking performance. If required, software may also predict jammer-to-signal (J/S) ratios at the weapon GPS antenna.

Figure 2 Navigation system performance analysis |
The next step (second panel in Figure 2) enhances software models with hardware-in-the-loop (HWIL) simulations, replacing predictions with actual performance data. Conclusions from RF and computer simulation stage will often aid significantly in field-test set-up. Benefits of simulation include isolating design flaws, validating algorithm performance, and exercising the GPS/INS system with realistic and stressful inputs. These activities may reduce the number of flight trials required, which in turn reduces the potential for program cost and schedule slips.
Modeling Results
FIGURES 3 AND 4 show predicted results from the commercially available Navigation Tool Kit (NavTK) regarding the navigation performance of the unaided GPS receiver within the fighter aircraft during its highly dynamic flight. STK generated the 6-degree-of-freedom (6-DOF) trajectory used in this test. This trajectory is based on the dynamic limits of the aircraft; representative roll/pitch/yaw rates; typical climbing; cruising and descent speeds; takeoff and landing distances, and so on. This data was subsequently passed to NavTK. Figure 3 shows number of satellites tracked throughout the flight while Figure 4 predicts East-North-Up errors given actual GPS performance (clock data, ephemeris data, and system performance) for July 1, 2005. This detail is possible because NavTK can accept archived GPS constellation data from the GPS Operations Center (GPSOC) to fully represent the effects of geometry, satellite health, ephemeris errors, and clock variations for individual SV signals.
![]() rder=”0″ align=”left” class=”content_image” src=”/files/gpsworld/nodes/2006/6535/i4_t.jpg” alt=”Figure 3 Number of signals tracked” /> rder=”0″ align=”left” class=”content_image” src=”/files/gpsworld/nodes/2006/6535/i4_t.jpg” alt=”Figure 3 Number of signals tracked” />
Figure 3 Number of signals tracked |
Figure 3 highlights flight portions when loss of lock is expected due to platform orientation and accelerations. When the aircraft initiates a steep turn, the accelerations cause cycle slips that result in loss of lock. These results are useful for isolating discrete periods of time during which performance of the INS-only solution can be scrutinized during hardware simulation. At these times the INS navigation filter relies exclusively on ΔV and Δθ terms from the inertial simulator to compute a fix.

Figure 4 Predicted navigation errors |
When PRN 25 disappears below the horizon approximately 25 minutes into the flight, we see a noticeable shift in predicted accuracy. This suggests that DOP values may worsen noticeably at this point, or that clock/ephemeris errors for this satellite had a noticeable effect on the GPS-only solution. These results depend on inputs provided for the receiver models, constellation behavior and tracking loop algorithms, and provide a start point for pre-HWIL evaluation. Again, results from this modeling exercise highlight a unique moment in time in which the performance of the GPS/INS navigation filter can be tested with a hardware simulator.
Software modeling tools can also provide valuable inputs to the simulation process with trajectory modeling. STK can create flight simulations for military applications including missiles, rockets, spacecraft, and airborne platforms. In this example, software created a 6-DOF fighter trajectory which was stored as a file on a SimGEN PC.
GPS/INS Simulation
HWIL GPS/INS simulation of many military flight trajectories consists of generating a composite GPS RF signal synchronized with inertial ΔV and Δθ terms. Precise synchronization is achieved via a 1 PPS interface between the RF signal generator and the inertial simulator PC. Latency of the IMU motion data is also specified in microseconds. Together, these RF and inertial inputs are delivered to the navigation system under test.
FIGURE 5 illustrates the GPS/INS test equipment in more detail. Platform dynamic motion (in this case from STK), GPS constellation data, signal parameters, and GPS/INS error sources are defined within the simulation application (SimGEN). Signal control commands are issued continually from the simulator PC to the RF signal generator via IEEE-488 (GPIB). The RF signal is typically connected to the GPS receiver antenna port via coaxial cable. INS ΔV and Δθ terms are calculated to the vehicle trajectory on a separate PC (SimINERTIAL) and are delivered to the GPS/INS device in test mode via the appropriate interface. The SimINERTIAL PC and signal generator are synchronized via a 1 PPS signal. Barometric altimeter aiding and instrumentation are achieved via MIL-STD-1553B.

Figure 5 GPS/INS simulation block diagram |
Realistic simulation requires many unique components of the navigation solution to be carefully specified in advance. These include but are not limited to:
- 1. Trajectory
- 2. Antenna pattern
- 3. Constellation geometry
- 4. Codes and frequencies
- 5. G-sensitivity
- 6. Gyro and accelerometer errors
- 7. Atmospheric effects
- 8. Multipath
- 9. Interference
Trajectory. As mentioned earlier, a flight trajectory is usually expressed as a series of time-stamped translational and rotational motion terms. Rotational motion is typically described by Euler angles or quaternions. The GPS/INS simulator uses this trajectory as the basis for calculating SV pseudoranges, Doppler values, and inertial delta-V and delta-q terms. This flight trajectory can be delivered to the simulator remotely via a high-bandwidth interface such as IEEE-488, SCRAMnet or TCP/IP, or, as in this example, may reside as a file on the simulator PC hard drive. Flight times may range from a few minutes to several hours or even days.
For this simulation, the 45-minute flight over Fort Worth includes take-off, landing, and several steeply banked high-g turns. The airspeed for the majority of the flight is approximately 500 mph.
Antenna Pattern. If the simulator’s RF signal is injected directly into the antenna port of the GPS/INS system under test, the gain and phase characteristics of the receive antenna must be modeled. For best results, the effects of the body on which the antenna is mounted must be included. Gain and phase pattern measurements are typically collected in an anechoic chamber or outdoor range and are generally available to test engineers evaluating GPS/INS system performance.
Constellation Geometry. A simulated flight can occur at any time or location to test the effects of constellation geometry on the navigation solution. Historical GPS almanac information is available from the GPSOC and can be loaded into the simulation scenario. This example used historical almanac parameters from July 1, 2005.
Codes and Frequencies. Most U.S. military GPS/INS systems operate at both L1 and L2 frequencies and track the encrypted P(Y) and unencrypted C/A codes. Future military receivers will also track the M-code on L1 and L2. To fully evaluate unique features of the weapon navigation system including direct-Y acquisition, SAASM functions, and resistance to interference, the simulator must support all modes of classified and unclassified operation.
G-Sensitivity. Acceleration force can alter the performance of a crystal oscillator. Specifically, changes to the local acceleration vector stemming from high-g maneuvers will change the output frequency of the oscillator. Airframe vibrations may cause frequency modulations of the oscillator output that affect the performance of the tracking loops. To a certain extent, the effects of these forces on the code- and carrier-signal offsets can be modeled. For this scenario, the oscillator G-sensitivity is specified as 2 × 10-11 sec/sec/G per axis, typical for a military-grade oven-controlled crystal oscillator (OCXO).
Gyro and Accelerometer Errors. Note that GPS/INS simulation does not test the performance of the sensor elements themselves; this exercise is generally conducted with mechanical spin tables or centrifuges. Rather, military INS manufacturers typically include a test interface that allows simulated motion terms to be directly injected into the navigation system. This allows test engineers to evaluate the performance of the Kalman filter during high-dynamic or stressed conditions. For one manufacturer’s system, this in
terface is proprietary to the Inertial Sensor/Recorder Simulator (ISRS-2); another’s systems accept these test inputs via RS-422. A non-proprietary inertial interface known as NATO Standard Agreement (STANAG) 4572 also accepts simulated ΔV and Δθ terms via RS-422.
Embedded gyro and accelerometer sensors are imperfect and are subject to a variety of errors. Stochastic errors may be modeled by random walk or by a Gauss-Markov noise estimator, while deterministic errors such as biasing, axis misalignment, and scale- factor errors should also be specified. For this simulation, a second-order Gauss-Markov model is used as described in STANAG 4572 for gyros and accelerometers with unique values for the natural frequency, damping factor, and power spectral density.
Atmospheric Effects. After Selective Availability was set to zero in May 2000, the primary contributor to GPS ranging error remains ionospheric delay. Dual-frequency receivers can effectively eliminate this effect by processing both carriers, but range measurements at L1 and L2 are still subject to multipath errors. Furthermore, ionospheric scintillation is a complex phenomenon that can affect the tracking performance of dual-frequency receivers. This simulation specifies the historical broadcast Klobuchar coefficients for July 1, 2005, and modifies the SV code and carrier offsets to approximate the effects of the ionosphere for the time, date, and location of the scenario.
Tropospheric delay varies by latitude and elevation angle and is a function of temperature, humidity, and atmospheric pressure. For more realistic results, the effects of this ranging error can also be simulated. For this simulated flight over Texas the surface refractivity index is set to 324.8.
Multipath. While the aerial environment is generally free of the same satellite obscuration effects more common on the ground, signals may still be reflected off wings, stabilizers, and flight control surfaces. These path delays affect the performance of the GPS receiver correlators and may introduce position and velocity errors into the navigation solution. GPS simulation allows the tester to specify reflective effects including fixed-delay multipath, Doppler multipath, and vertical plane multipath on a per-satellite basis.
Interference. Over the last 10 years a variety of techniques have been developed to mitigate the effects of intentional interference on military navigation systems. Adaptive antenna arrays may steer nulls in the direction of jammers or beams in the direction of satellites. Spectral filtering divides the L1 and L2 bandwidths into discrete bins in which interference can be excised using fast Fourier transform (FFT) techniques. Polarization filters attempt to reject interference from sources that are not right-hand circularly polarized (RCHP). Regardless of the mitigation technique, the performance of antijam GPS systems is generally evaluated in the lab prior to conducting flight tests.
Simulation allows the tester to specify a variety of interference waveforms including broadband Gaussian noise, continuous wave (CW) and swept-CW, AM, FM, and coherent jammers. The relative signal strength of these sources will vary as a function of the distance between the navigation system under test and the jammer.
HWIL Simulation Results
Military navigation engineers are usually interested in the following performance characteristics:
- 1. Accuracy
- 2. Availability
- 3. Resistance to interference
FIGURE 6 shows example results that can be obtained using this equipment to test INS devices under these simulated highly dynamic test conditions. The results presented here are for illustrative purposes only and show the type of data obtainable to fully characterize the performance of a specific INS under all possible conditions. In this example, latitude (black), longitude (green), and height (blue) errors are plotted separately. Discontinuities in the calculation of latitude and longitude may be observed when high-g turns are initiated. Errors in the height component may correspond to rapid climbs and descents. RMS error for this entire illustrative mission was slightly higher than 16 meters. Again, these results are based on the specific inputs for this simulation. Navigation engineers would need to determine whether similar inputs represent their own flight environment and whether these results will satisfy their operational objectives. In practice, results will vary as a function of simulated gyro/accelerometer errors, oscillator g-sensitivity, pre-flight calibration time, flight dynamics, barometric aiding, and SV visibility.

Figure 6a INS simulation results: latitude upper left, longitude upper right, height lower left |
As expected, availability of the navigation solution was 100 percent. In contrast to the GPS-only performance modeled in Figure 3, the INS solution used ΔV and Δθ inertial inputs to compute a solution whenever a GPS fix was temporarily unavailable.

Figure 6B Close-up look at latitude (black), longitude (green) and height errors (blue) from lower right panel |
Intentional RF interference was not created for this HWIL simulation. However, adding this component to the RF signal is possible with additional equipment, and a similar chart could be created to illustrate the effects of jamming on the INS solution.
In addition to this simple error plot, truth data from the GPS/INS SimINERTIAL simulator were also delivered in WGS-84 ECEF coordinates to STK for graphical performance analysis. Time-stamped latitude, longitude, and height data extracted from the military GPS/INS MIL-STD-1553B interface were also provided to STK. Several key performance parameters were then analyzed including carrier-to-noise levels (C/N0), tracking states, pseudorange error per channel, and instantaneous position/velocity errors. FIGURE 7 and the opening graphic compare truth location at a single moment in time as prescribed by the simulator (gray aircraft) versus the actual GPS/INS computed location (color-coded per figure of merit, or FOM). STK can be used to visualize these outputs in real time. Instantaneous position error is projected on the red vector between the aircraft centers of gravity. Vectors pointing toward each SV tracked may be color-coded to J/S, while line type may be selected based on tracking state. Instantaneous pseudorange error for each channel is also provided. Many other data items can also be displayed graphically or in text.
=”articlecaption”>

Figure 7 INS simulation results
Conclusion
Field tests generally provide the most indisputable evidence of military navigation system performance. When a GPS/INS-guided gravity weapon is released above a test range and impacts the ground near its target, we may physically measure the miss distance. We may also assume a similar weapon released at a future time under similar conditions will achieve approximately the same results. But how can we be sure? One approach would be to perform hundreds of trials, if costs and schedules were of no concern.
However, this is rarely the case. GPS receiver performance models used with the HWIL SimINERTIAL simulator allow the test engineer to minimize flight tests while achieving the same level of confidence. As we have shown, modeling and simulation activities may be tailored for a specific objective — for example, highly dynamic aircraft motion with a fixed satellite constellation geometry while using inertial sensors with known bias and drift characteristics. This simulation may be valuable in conducting analysis of alternatives for different user equipment mixes (receivers, antennas, inertial sensors, platforms, and so on) or to ensure the system meets requirements for all missions.
Other modeling and simulation objectives may differ from those described in this article. FIGURE 8 enhances our aircraft flight test model to include intentional jamming, an advanced digital antenna, and future modernized GPS space capabilities. Similar enhancements can be added to the RF simulation.

Figure 8 Real-time 4D data display |
Whatever the application, a variety of commercial products allow navigation engineers to prepare for live flight trials on the test range. GPS receiver performance analysis models can be used to create specific GPS/INS simulations that focus on key performance characteristics and environmental challenges. Graphical analysis software can simplify the task of combing through thousands of data records to isolate specific periods during which performance is most important. With careful planning and a disciplined test approach, military and defense industry engineers can use these tools to ensure their weapon systems will deliver at the most critical times on the battlefield.
Manufacturers
Analytical Graphics, Inc. developed the Navigation Tool Kit and STK commercial software products used for this simulation. GPS/INS test results were collected using the Spirent GSS7700 simulator with SimINERTIAL.
CURTIS HAY is director of GPS business development for Spirent Federal Systems. He has master’s degrees in electrical engineering and business administration and served eight years as an officer in the United States Air Force in a variety of GPS-related assignments.
COLIN FORD is a senior software engineer at Spirent Communications and is the lead architect for the SimINERTIAL navigation test suite.
GREG GERTEN supports satellite navigation and electronic warfare programs for Analytical Graphics, Inc. He received a master’s degree in electrical engineering from the University of Dayton and has completed graduate courses in GPS at the Air Force Institute of Technology.