Dull, dirty and dangerous — those used to be the jobs relegated to autonomous systems. But a decade-plus of improvement in sensor and computing technology has brought autonomy into the mainstream as a defining technology of the future.
At September’s ION GNSS+ conference, I attended a panel titled “Autonomous Cyber-Physical Systems — The Way Ahead.” I came away astounded by how much is changing, and how fast, because of autonomous CPS.
The panel was chaired by John Raquet of the Air Force Institute of Technology and Zak Kassas of the University of California Riverside. It featured presentations covering topics such as the Columbus Smart City Challenge (Dorota Grejner-Brzezinska, The Ohio State University), benefits of precision agriculture (Steve Rounds, John Deere), robotic teammates on the battlefield (Brett Piekarski, U.S. Army), and UAV design and certification (Demoz Gebre-Egziabher, University of Minnesota).
Autonomous cyber-physical systems (CPS) include unmanned aerial vehicles, self-driving cars and unmanned underwater vehicles. The panel addressed the state of autonomous CPS as well as challenges that need to be addressed as we integrate these systems into our environment.
Rather than discuss a specific application, Michael Veth, CEO of Veth Research Associates, tackled a difficult question: Just how much autonomy do we give machines?
“Rigorous risk assessment is the most critical component of machine-controlled autonomous systems,” Veth said. He said the scope of the machine’s autonomous decisions should be limited to the minimum necessary — in other words, avoid the scenario depicted in the movie WarGames.
Another rule: “Don’t put beta software on the street,” he said, recalling the Tesla autosteer system that resulted in a death. Instead, follow DARPA’s example, with its extensive sandbox testing.
Summing up his presentation, Veth provided five guidelines for developing autonomous machines:
Perform rigorous risk assessments;
limit range of action to the minimum required;
use generative models whenever possible;
train and evaluate using maximum available data; and
The U.S. Defense Advanced Research Projects Agency (DARPA) Microsystems Technology Office is soliciting research proposals for the development of a new class of atom-based systems using integrated photonics and trapped atoms to enable high-performance, robust, portable clocks and gyroscopes.
The military researchers are asking industry to develop relatively simple portable photonic integrated circuits (PICs) for high-performance position, navigation and timing (PNT) devices as an alternative to GPS for when satnav signals are not available.
A PIC or integrated optical circuit, similar to an electronic integrated circuit, integrates multiple photonic (having to do with light) functions, providing capabilities for information signals imposed on optical wavelengths, typically in the visible spectrum or near-infrared, 850–1650 nanometers.
A-PhI Program
The Atomic-Photonic Integration (A-PhI) program seeks to develop trapped-atom based, high-performance PNT devices, reducing the complexity of these atomic systems by using PICs. According to the DARPA document, the PICs will replace the optical assembly behind devices such as sensitive and accurate angle sensors and clocks, while still enabling the necessary trapping, cooling, manipulation and interrogation of atoms.
A-PhI aims to demonstrate that compact PICs can replace the optical bench of conventional free-space optics for high-performance trapped-atom gyroscopes and trapped-atom clocks without degrading the performance of the underlying physics package.
Physics
Atomic systems using trapped atoms have the potential to be made portable while maintaining their accuracy due to the atomic trap’s small size and the inherent isolation a trap offers an atomic system from the environment, especially from acceleration.
Currently, these systems are bulky, heavy, and not notably portable, because of the complexity of the optical systems used to create the trap.
In the past, efforts to miniaturize the hundreds to thousands of optical components in such benchtop systems have relied on removing optical elements, miniaturizing the remaining elements, and tightly integrating them in a small package.
The products deliver degraded performance with the need to maintain very tight optical alignment, causing both poor environmental robustness and poor tolerance to design errors. Effective miniaturized atomic systems cannot be achieved at a reasonable cost with this approach.
Recent developments in PIC research suggest that on-chip optical frequency combs based on microresonators, optical frequency synthesis, novel on-/off-chip coupling, wavelength demultiplexers, and on-chip phased arrays for dynamic manipulation of light fields can replace optical systems with readily manufacturable, low-cost chips without the alignment sensitivity of conventional free-space optics.
Gyroscopes
A-PhI also seeks to develop proof-of-concept trapped atom gyroscopes, a matter-wave analog of the interferometric fiberoptic gyroscope. Such a miniaturization effort could generate an order of magnitude improvement in angular sensitivity and dynamic range over current free-space products.
A-PhI hopes to develop portable, high-performance, navigation and timing systems: the miniaturization of the optics of atomic systems without a decrease in performance.
Subsequent work, the RFP asserts, will be required to incorporate the necessary compact and robust lasers and electronics to achieve a fully functioning, high-performance, portable PNT system.
DARPA’s OFFensive Swarm-Enabled Tactics (OFFSET) program envisions future small-unit infantry forces using small unmanned aircraft systems (UAS) or small unmanned ground systems (UGS) in swarms of 250 robots or more to accomplish diverse missions in complex urban environments.
By leveraging and combining emerging technologies in swarm autonomy and human-swarm teaming, the program seeks to enable rapid development and deployment of breakthrough capabilities to the field.
DARPA has awarded Phase 1 contracts to teams led by Raytheon BBN Technologies and Northrop Grumman Corporation.
Image: DARPA
Swarm Tactics. Both teams will serve as a swarm systems integrators tasked with designing, developing and deploying an open architecture for swarm technologies in physical and virtual environments.
Each system would include an extensible game-based architecture to enable design and integration of swarm tactics, a swarm tactics exchange to foster community interaction, immersive interfaces for collaboration among teams of humans and swarm systems, and a physical testbed to validate developed capabilities.
The teams will be responsible for experimentation and systems-integration efforts for realizing swarm capabilities, including producing tactics and technologies to test on its respective architecture.
Swarm Sprints. DARPA also aims to engage with a wider developer and user audience through rapid technology-development and integration efforts called swarm sprints. Participants in these experiments — sprinters — can work with one or both integration teams and each other to create and test their own novel swarm tactics and enabling technologies.
Roughly every six months, DARPA plans to solicit proposals from potential sprinters, with each swarm sprint focusing on one of five thrust areas: swarm tactics, swarm autonomy, human-swarm teaming, virtual environment and physical testbed.
The end of each sprint would coincide with physical and virtual capability-based experiments designed to test and assess integration of the thrust-specific OFFSET technologies. The experiments would also provide direct engagement between DARPA, the teams and sprinters, and warfighters who could help further tailor OFFSET capabilities to meet real-world operational needs.
“The swarm sprints are empirical experiments designed to accelerate our understanding of what swarms can do in urban environments,” said Timothy Chung, program manager in DARPA’s Tactical Technology Office. “By having swarm sprints at regular intervals, we’re able to ensure that we’re keeping up with the latest technologies — and are in fact helping inform and advance those technologies — to better suit the needs of the OFFSET program. Given the wide range of capabilities that we’re interested in, we’re looking for wherever those innovative solutions are going to come from, whether they be small businesses, academic institutions or large corporations.”
The day started like any other day. The land surveying crew loaded up their vehicle, equipment and marching orders to tackle the next project on the list.
This field party is like most surveyors across the globe — they are equipped with the latest surveying technology including GPS base and receivers, robotic total station and a UAS for aerial photography. These tools are necessary to be competitive in today’s surveying arena as speed and productivity are paramount to the success of the project and the company.
But on this day, any device with the ability to determine geographic location via satellite reception was rendered useless.
Today became known as the day that GPS went away.
How we became dependent on GPS
Let’s back up the story to the introduction of GPS and how our dependency on this technology came to be. With the invention of satellites culminating with the Russian effort to launch Sputnik, the United States became involved in a “race to space.” Our early efforts to use satellites were proven worthy with the successful ability to track submarines by reception of radio signals and trilateration.
Further enhancements through research resulted in the development and creation of the NAVSTAR satellite in 1978. By 1993, 24 satellites were in orbit to make the GPS system fully functional (NASA.gov).
Meanwhile, the Russians were committed to a satellite network for navigational purposes during the same time period. The first satellite, Kosmos-1413, was launched in 1982 with the full 24 satellite constellation becoming operational in 1995.
Together, these systems (known as global network satellite systems or GNSS) allowed for location and navigation abilities never thought possible, and the surveying community began its adoption of the technology.
Early survey adopters of GPS were usually large engineering firms, state departments of transportation (DOTs) and federal agencies that could afford the large financial commitment to the equipment (both GPS and computers), software and computing costs required to use the technology.
The data-collection times were long, and the software analysis required enormous patience and extensive mathematical knowledge, but the results were beyond what the everyday surveyor had ever before accomplished.
Significant distances could now be measured with the same or better accuracy than taping or using an electronic distance meter could have provided. The true revolution came when real-time kinematic (RTK) GPS was invented and was affordable to the everyday surveyor (GPS World, May 2016).
S/A and A-S
Most GPS users, especially operators of survey-grade receivers, are not aware of the early days of satellite navigation and the military’s use of selective availability, otherwise known as S/A (GPS World, Sept/Oct 1990). This methodology was implemented by the Department of Defense (DoD) on May 25, 1990 to limit accuracies for non-military GPS users.
This procedure was created to allow erroneous timing at random occurrences throughout transmission of satellite radio signals. These variations in timing more than negatively tripled the normal precision of an autonomous GPS position calculation, all in the name of introducing uncertainty to potential enemy users.
And if S/A wasn’t enough, the DoD also could implement another deterrent called anti-spoofing (A-S) and encrypt the precision or P-code of the satellite signal. The big factor here is that the general public (in our case, the surveying community) didn’t know if or when A-S was turned on. These factors were frustrating to the GPS user, so data collection and coordinate determination became a tedious operation.
Early receiver use by surveyors relied on differential GPS data collection for high-accuracy location (<10 cm or better). This method consisted of placing one or more receivers on known positional points (usually on monuments published through the National Geodetic Survey) while simultaneously performing data collection on new points for positional establishment.
Prior to S/A, the software utilized to analyze and reduce the data collection provided feedback on “bad” data, but there were usually environmental issues causing the problem (such as cycle slips and radio interference.) The software would highlight the suspect data for the reviewer to determine validity and acceptance.
Because of the nature of differential GPS data collection, error checking remained the same once S/A was implemented. If the software calculated an incorrect coordinate at a known point, the same measurements to the new survey point were dismissed as a false reading.
Surveyors were mostly left unfazed by S/A as real-time kinematic (RTK) and real-time network (RTN) follow a similar procedure utilizing a correction from a known terrestrial point. Even with the anti-spoofing activated, the surveying profession continued to use this high-tech location system that revolutionized long distance measurement. Things have been running along smoothly with steady improvement of receivers, data collectors, and data coverage until…
The day it goes away
…the unthinkable happens. Our national satellite system is no longer available.
It doesn’t matter why GPS has gone away on this day. It could be for many different reasons: federal budgets; enemy interference such as geomagnetic disturbances (GMD) or electromagnetic pulse (EMP);
conventional or nuclear war; interference from solar storms, asteroids, or comets; or the system just simply breaks.
Artist’s rendering of a cross-section of the Earth’s magnetosphere. (IMAGE: NASA)
Another thing for all users of GNSS to consider in these tumultuous times is how newer systems are integrating other countries’ satellite networks into their navigational observations.
Our relationship with the Russian government can be on unsteady ground from time to time, so our use of their GLONASS signals must be reviewed for accuracy as well (See GPS World, August 2017).
It won’t matter whether a spoofed satellite signal originates from a private Russian hacker or from their actual government; it will still lead to incorrect information and bad data. Imagine having to revise a plat because the GLONASS data was purposely corrupted!
Obviously, the main reason they would allow transmittal of misinformation would be for military reasons, but I can only imagine their joy of messing with professional navigation and the recreational users in the U.S. These opportunities will also apply to the Chinese and Indian constellations, too.
We’re not ready
The bottom line is that we, the U.S., aren’t ready for it. Whatever may be the reason for the failure, we do not have a backup plan and have relied much too heavily on satellite navigation. Gone is our ability to navigate through our electronic devices, including smartphones, fitness trackers, in-car mapping and, yes, high-precision surveying equipment. These items have now become door stops and space wasters.
This new conundrum doesn’t just stop with the surveyor and recreational GPS equipment. A significant amount of construction equipment relies on machine control, from bulldozers and road graders to high-rise cranes.
This will also affect a large amount of agricultural equipment and processes. Those high-tech tractors with autosteer and computer-guided planters? Back to the drawing boards. So many things in our lives today are guided or controlled by navigational systems designed around GPS use, and the surveyor is squarely in this mix.
What’s a surveyor to do?
The first thought on the surveyor’s mind is now having to perform all surveying tasks with instruments that are not based on satellite navigation. Yes, the reason for this GPS shutdown isn’t widespread enough to affect cellphone signals and other radio communications, but it killed off the one navigation system more people rely on than any other.
Because of this unfortunate shutdown, all GPS-based equipment is now worthless. This means your trusty RTN receiver with cellphone connection, your old base unit for those times when cellphone coverage is lacking, the fancy new UAV for taking orthophotography, and your cellphone or handheld GPS receiver for tracking down NGS monuments — all of them are done. Only your conventional equipment will complete the job.
Is the surveying profession finished? How do we locate those remote section corners in the middle of nowhere?
Don’t throw in the towel just yet. Surveyors have been measuring land using these types of instruments for centuries, with today’s versions being electronic and sophisticated. Robotic servos, mini computer-data collectors, efficient radio links and active tracking prisms have turned our forefathers’ simple transit into a sophisticated topographic or construction staking machine.
Data collection is much easier than writing everything in a field book, and have graphical interfaces and remote connection capability to keep you in touch with the office from nearly anywhere. The reality, however, is that the surveyor will now have to use methods and equipment for traversing, data collections and all staking tasks that will greatly reduce our productivity and profitability.
Experience could also end up being a big factor here as well. The average age of the professional land surveyor in the United States is 58 and climbing. This means most of these practitioners have been in the business well before GPS technology, so there is still the potential of surveying without the electronic birds in the sky.
Surveyors can still hang their shingle and practice their craft, but we’ve now lost a big component of our world: geographical location. The key to the success of GPS was the ability to determine geographic location and subsequently convert that information into a data format compatible with one’s local system. From UTM coordinates to State Plane, the world became smaller with this technology.
The surveyor can still determine latitude and longitude using manual surveying methods for specifically observing the sun and Polaris. The mathematics and procedures are complicated, but they still allow for determining a geographical location with high accuracy.
We can also utilize the extensive geodetic monumentation networks established nationwide, all started around the formidable effort by the Coastal and Geodetic Survey. This key federal agency, later to become the National Geodetic Survey, laid the groundwork and set the monuments for the backbone of our national horizontal network system. This system has been augmented over the years by their own programs, as well as state and local authorities, to expand our coverage to all portions of the United States.
By incorporating these monuments into a survey, a relationship to geographical datums is still easily obtained. While these methods of establishing geographical coordinates through use of conventional equipment sounds time consuming, without GPS and other satellite-based navigational aids, it will become much more cumbersome.
So, what do we do next?
Depending on which industry you are in or your necessary level of accuracy, several alternatives are being developed. For those in the shipping industry (including the trucking sector, which numbers more than 15 million vehicles), accuracy may only need to be nominal — for instance, 5 meters, give or take.
Several systems are in development with the biggest priority on enhanced loran (short for “long range navigation”) or eLoran (also see GPS World April 2014 and GPS World Nov 2015). Several bills are currently being reviewed in the U.S. House and Senate for consideration of funding this technology.
These programs are still under development, but DARPA has been tasked with finding another system so our dependence on GPS will not cripple our defense in a time of war.
Abraham Lincoln, the county surveyor — a statue at Lincoln’s New Salem State Historic Site, Illinois.
Another alternative will be private satellite networks. With programs like SpaceX and Blue Origin, vehicles to carry new satellites into orbit are now a viable option. It will be possible for companies to create their own networks for private or commercial use.
With the large number of construction, shipping and automobile sales, the day may come when the navigation system within each of these is proprietary. However, if we are faced with geomagnetic disturbances (GMD) or an electromagnetic pulse (EMP) as mentioned earlier, it won’t matter whose network it is — they will all be rendered useless.
Until another viable option is created, the surveyor will be forced to take a step back in productivity and technology with conventional instruments. While not the most ideal thing, it will force the profession to retrain its entire workforce on procedures and methods that haven’t been regularly utilized for many years.
For some, it will be like throwing away the computer for a typewriter or the remote control for the television set. For others, it will be an opportunity to truly “follow in the footsteps” of past surveyors. They will understand exactly how their predecessors went about “running the lines” and completing a true boundary survey.
I, however, hope we don’t find ourselves in this situation, and that a suitable backup system or even a more advanced replacement for our antiquated GPS is invented soon.
But if the day comes and our GPS goes away, I’m guessing that surveyors not having their favorite locating device will be the least of our society’s worries. It will truly be a day that will live in infamy.
A team from Draper and the Massachusetts Institute of Technology (MIT) has developed advanced vision-aided navigation techniques for UAVs that do not rely on external infrastructure, such as GPS, detailed maps of the environment or motion capture systems.
When a firefighter, first responder or soldier operates a small, lightweight flight vehicle inside a building, in urban canyons, underground or under the forest canopy, the GPS-denied environment presents unique navigation challenges.
In many cases, loss of GPS signals can cause these vehicles to become inoperable and, in the worst case, unstable, potentially putting operators, bystanders and property in danger.
Attempts have been made to close this information gap and give UAVs alternative ways to navigate their environments without GPS. But those attempts have resulted in further information gaps, especially on UAVs whose speeds can outpace the capabilities of their onboard technologies.
For instance, scanning lidar routinely fails to achieve its location-matching with accuracy when the UAV is flying through environments that lack buildings, trees and other orienting structures.
Finding a Solution
DARPA awarded contracts to Draper and two other industry teams to create UAVs that autonomously sense and maneuver through unknown environments without external communications or GPS under the Fast Lightweight Autonomy (FLA) program. (Photo: Draper)
Working together under a contract with the Defense Advanced Research Projects Agency (DARPA), Draper and MIT created a UAV that can autonomously sense and maneuver through unknown environments without external communications or GPS under the Fast Lightweight Autonomy (FLA) program.
The team developed and implemented unique sensor and algorithm configurations, and has conducted time-trials and performance evaluations in indoor and outdoor venues.
“The biggest challenge with unmanned aerial vehicles is balancing power, flight time and capability due to the weight of the technology required to power the UAVs,” said Robert Truax, senior member of technical staff at Draper. “What makes the Draper and MIT team’s approach so valuable is finding the sweet spot of a small size, weight and power for an air vehicle with limited onboard computing power to perform a complex mission completely autonomously.”
Draper and MIT’s sensor- and camera-loaded UAV was tested in a number of environments ranging between cluttered warehouses and mixed open and tree filled outdoor environments with speeds up to 10 m/s in cluttered areas and 20 m/s in open areas.
The UAV’s missions were composed of many challenging elements, including tree dodging followed by building entry and exit and long traverses to find a building entry point, all while maintaining precise position estimates.
“A faster, more agile and autonomous UAV means that you’re able to quickly navigate a labyrinth of rooms, stairways and corridors or other obstacle-filled environments without a remote pilot,” said Ted Steiner, senior member of Draper’s technical staff. “Our sensing and algorithm configurations and unique monocular camera with IMU-centric navigation gives the vehicle agile maneuvering and improved reliability and safety — the capabilities most in demand by first responders, commercial users, military personnel and anyone designing and building UAVs.”
Draper’s contribution to the DARPA FLA program — documented in a recent research paper for the 2017 IEE Aerospace Conference — was a novel approach to state estimation (the vehicle’s position, orientation and velocity) called SAMWISE — Smoothing And Mapping With Inertial State Estimation.
SAMWISE is a fused vision and inertial navigation system that combines the advantages of both sensing approaches and accumulates error more slowly over time than either technique on its own, producing a full position, attitude and velocity state estimate throughout the vehicle trajectory.
The result is a navigation solution that enables a UAV to retain all six degrees of freedom and allows it to fly autonomously without the use of GPS or any communication with vehicle speeds of up to 45 miles per hour.
The team’s focus on the FLA program has been on UAVs, but advances made through the program could potentially be applied to ground, marine and underwater systems, which could be especially useful in GPS-degraded or denied environments.
Micro-Technology for Positioning, Navigation, and Timing towards PNT everywhere and always; slide from a 2014 DARPA presentation to the Space-Based Positioning, Navigation and Timing National Advisory Board (Image: Robert Lutwak, DARPA Micro-Technology Office). Click to enlarge.
The U.S. Defense Advanced Research Projects Agency (DARPA) has initiatives underway with a dizzying number of technologies, all seeking to reduce reliance on GNSS in challenged environments. Using cold atom interferometry and other techniques to reduce the size, weight and power consumption (SWAP) as well as cost of inertial sensors, employing other signals of opportunity (SOI), chip-scale atomic clocks (CSAC), micro-electro-mechanical systems (MEMS) and more, the Micro-Technology Office (MTO) and the Adaptable Navigation Systems (ANS) projects press relentlessly forward to provide U.S. forces with PNT “everywhere and always.”
DARPA’s ANS initiative explores tools to enable use of the many sensors available to warfighters and first reponders. “Over the past two decades, the field of robotics has done a lot for extracting features out of imagery and tracking those features as the robot moves through a given environment,” said Lin Haas says, program manger at the Strategic Technology Office. “We’ve been building upon those capabilities and using the capabilities for the purposes of navigation.”
ANS seeks to provide GPS-quality PNT to military users regardless of the operational environment. It addresses three basic challenges through its Precision Inertial Navigation Systems (PINS) and All Source Positioning and Navigation (ASPN) efforts:
better inertial measurement units (IMUs) that require fewer external position fixes;
alternate sources to GPS for those external position fixes;
new algorithms and architectures for rapidly reconfiguring a navigation system with new and non-traditional sensors for a particular mission.
PINS is developing an inertial measurement unit (IMU) that uses cold atom interferometry for high-precision navigation without dependence on external fixes for long periods of time. Atom interferometry involves measuring the relative acceleration and rotation of a cloud of atoms within a sensor case, with potentially far greater accuracy than today’s state-of-the-art IMUs.
A company called AOSense has applied cold-atom interferometry to IMUs and demonstrated sensors that support system drifts of 5 meters per hour, by using quantum physical properties to measure the relative acceleration and rotation of a cloud of laser-cooled atoms. The next challenge is shrinking the lasers to microsystem size, because the concept requires three lasers generating five beams to cool and move the atoms through interferometers to determine movement and rotation of the device.
Because even long-duration IMUs require an eventual position fix, the ASPN effort is developing sensors that use signals of opportunity — non-navigation signals from sources like television, radio and cell towers, and satellites, as well as natural phenomena, such as lightning.
“Our navigation systems tend to be finely tuned, and as a result they are fairly brittle in terms of accepting new sensors without a lot of hands-on time to make it work,” said Haas.
Flexible Combinations. Integrating and tuning these diverse sensors, maps and other components into a navigation system is expensive and slow, producing platform and mission-specific solutions. The ASPN effort is also developing new fusion algorithms and plug-and-play processing architectures for rapid integration and near-real-time reconfiguration or upgrading of sensors, IMU devices, maps and databases on a navigation system. With flexible combinations of existing and new navigation sensors, ASPN can produce improvements in accuracy, robustness and cost of navigation systems across a range of platforms, environments and missions.
PINS is working towards a final subsystem demonstration in fiscal year 2017. ASPN has completed multiple field demonstrations on air, land and sea platforms, with final demonstrations scheduled in fiscal 2017.
Chip-Scale Atomic Clocks. Meanwhile, last year DARPA launched the Atomic Clocks with Enhanced Stability project under the direction of Robert Lutwak (recipient of GPS World’s Leadership Award for Products in 2012). “If ACES is successful, virtually every Defense Department system will benefit,” Lutwak said.
ACES seeks to create palm-sized, battery-powered atomic clocks that perform up to 1,000 times better than the current generation, employing experts and techniques from atomic physics, optics, photonics, microfabrication and vacuum technology. “All of our modern communications, navigation and electronic warfare systems as well as our intelligence, surveillance and reconnaissance systems depend on accurate time-keeping,” Lutwak added.
Pseudolites. In other, non-DARPA initiatives around the Department of Defense, the Command and Control Directorate of the Army’ Communications-Electronics Research, Development and Engineering Center (CERDEC) is “very concerned about what happens when we lose GPS,” according to Paul Olson. CERDEC is developing vehicle-based, dismounted and anti-jam antenna pseudolite systems.
The pseudolites have completed feasibility testing and entered acquisition for transmitters, receivers and command-and-control. Rockwell International and L-3 are developing the transmitters. The effort seeks to use current military GPS receivers with software modified to accept pseudolite signals.
This article draws on interview quotes that appeared in Signal magazine of the Armed Forces Communications and Electronics Association.
I have mixed emotions as I write this column. Delighted, absolutely, to be given the opportunity to write for GPS World on topics that I am so passionate about; but also sad that we will not see any more articles from Don Jewell, whose excellent columns I followed so religiously over the years. I never had the opportunity to meet Don personally but, to me, he is irreplaceable. But let’s talk about the changing face of defense positioning, navigation and timing (PNT) — not in the editorial sense, but in the technology sense.
As we all know, PNT and GPS are no longer synonymous. With a host of innovative technologies on the horizon, PNT is about so much more than GPS these days, and the military knows it. Sure, GPS has been the workhorse of PNT for many years, and it’s not going anywhere anytime soon. I’ll be clear on that: GPS is not going anywhere. But it’s not a complete solution either.
Let me paraphrase what a friend in the infantry tells me, by saying GPS is a 60 percent solution to their navigation needs. What does that mean? Well, it goes something like this:
60 percent of the time: GPS is great, it does what we need.
20 percent of the time: We are indoors or underground, and GPS is simply not available.
15 percent of the time: We’re in an urban canyon. GPS availability is intermittent, and the accuracy is poor.
4 percent of the time: We’re in forests or dense vegetation, and GPS is sporadic.
1 percent of the time: GPS is jammed.
You can argue the numbers depending on the mission, but you get the idea. What, then, is the answer for the soldier? Well, first things first: We don’t want to reinvent the good 60 percent so, once again, GPS is here to stay. The question is how do we push past that 60 percent figure and get ourselves closer to 100 percent? Let’s go from the bottom up, and address GPS jamming.
Overcoming interference
The classic solution to jamming is an adaptive antenna, also known as a controlled radiation pattern antenna (CRPA). More on this another time but, for now, suffice it to say that CRPAs are a well-understood and mature technology, and can offer very high levels of jamming resistance.
The often-cited disadvantage of a CRPA antenna is its size, weight and power: As CRPAs employ multiple antenna elements, they are inherently larger and heavier. The electronics can pretty much be covered by a single chip these days, leaving the antennas themselves as the problematic aspect, but advances in antenna technology have also made big hurdles.
For airborne platforms, conformal antennas designed as part of the structure or fuselage can be used; whilst for the dismounted soldier, the trend is towards wearables, where the antennas may be an inherent part of the clothing or helmet design.
Aside from adaptive antennas there are a whole host of other techniques in your anti-jam kit bag, including receiver-based techniques.
It’s a numbers game
For forests and urban canyons, this is where multi-frequency multi-GNSS comes into its own. It really is a numbers game: The more constellations you use, the more satellites you can choose from, and the greater your chances of seeing enough satellites to derive a reasonable navigation solution. You also have more options for mitigating the effects of multipath and other errors.
Of course, this gives rise to a potentially difficult question for some governments: In defense applications, do you want to rely on foreign GNSS constellations as part of your PNT solution? The attitude here depends on your own country’s policy and a trade-off of perceived gains against perceived threats. The UK, for example, has chosen to embrace all available constellations and frequencies in future military navigation systems.
That’s probably about as far as GNSS gets you, because now we’re looking at the 20 percent of the time where the user is indoors or underground. In other words, environments where GNSS simply isn’t available. This 20 percent is perhaps more tricky to address, and is the realm of alternative and complementary PNT technologies.
Beyond GNSS
Fusing different sensor modalities to create a combined navigation solution is anything but a new idea. The benefits of combining GPS with an inertial sensor were recognized a long time ago, and this classic pairing continues to be the subject of research today.
The two technologies are highly complementary in various ways: GNSS offers absolute position, low short-term accuracy, and high long-term accuracy. On the other hand, an inertial sensor offers the opposite: relative position, high short-term accuracy, and low long-term accuracy. It’s a match made in heaven.
But whilst GNSS plus inertial may be a good choice for, say, airborne platforms, it doesn’t solve the in-building and underground problem. Without GNSS, you need something else.
Indoor navigation has been one of the hottest research topics of recent times, but there are really two types of indoor scenario: the first is when you’re in a shopping mall or airport. You can use an inertial sensor, Wi-Fi, mobile base stations, and various other bits of infrastructure to help you navigate.
The second scenario is the military one: You’re in an unfamiliar enemy compound or underground tunnel complex. In this case, there is no GNSS, no Wi-Fi, no mobile communications; and, for navigation, you can only really rely on the sensors you bring with you.
So what other sensor works underground, and complements inertial?
Visual/inertial integration
Visual odometry is an established, yet often overlooked, navigation technology that is undergoing a resurgence of interest, in both military and civilian applications. In simple terms, visual odometry uses sequential camera images to determine motion in a six degrees of freedom reference frame. Using either single or multiple cameras a platform can estimate both its 3D position and orientation, providing much the same information as an inertial sensor — but with a few added benefits.
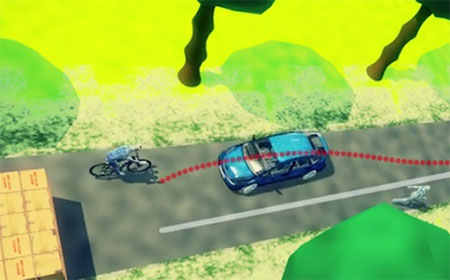
Visual/inertial sensing allows 3D reconstruction of a road incident. (Screenshot: Roke)
Because cameras and associated vision-processing algorithms are capable of detecting corners and features, a 3D model of the environment in which the soldier is operating can also be built up. In other words, we can perform simultaneous localization and mapping (SLAM).
But like any navigation technology, visual odometry has its limitations. It likes well-defined features in the environment, such as corners, but can get confused by moving objects like trees and clouds. Its performance also depends on factors such as the quality of the camera and lens, and how well the system is calibrated. Like an inertial sensor, it provides a relative positioning solution and is subject to accumulation of errors over time. It’s a great technique, but it really comes into its own when combined with another navigation sensor, such as an inertial unit.
And it’s not just the military guys who are taking advantage of visual/inertial integration. Just take a look at Google’s Tango project, or what Qualcomm is doing, or Roke’s black box for driverless cars, to name but a few examples.
Bringing it all together
Over the course of the last decade or two, the operational landscape for soldiers has changed significantly, with far greater focus on urban warfare. The military realized some years ago that the answer to robust navigation for dismounted soldiers was going to require a range of sensor modalities: no single navigation technology is ideal in all environments. That’s why this has been the focus of so many defense programs of recent years.
By way of example, the UK Ministry of Defence (MoD) initiated a research program in 2013 called Dismounted Close Combat Sensors (DCCS). The contract addressed a range of soldier capabilities, one of which was the ability to provide reliable soldier position and orientation in all environments.
The DCCS programme evaluated a whole bunch of technologies, but eventually converged to an integration of three primary sensors: multi-constellation GNSS, a low-cost inertial measurement unit (IMU) and a video camera. The single monocular video camera was used to strap down the IMU, in a very tightly-coupled system. It makes sense: when GNSS is available, use it. When GNSS isn’t available, the integrated visual/inertial navigation sensor continues to provide both location and orientation for the duration of the mission. As it should be for a tightly integrated navigation system, the performance of the combined system outperforms any individual sensor in isolation.
Whilst integrated sensor systems enable our soldiers to position, orientate and navigate themselves, the performance of individual sensors continues to be pushed to new limits. Inertial technology is advancing all the time, and defense is again pushing the boundaries. Take a look at what DARPA is up to, as an example.
The missing ‘T’
Haven’t we missed something? Ah yes, there’s a “T” in PNT. So whilst there would seem to be various options for achieving a robust positioning and navigation solution, we mustn’t forget precise timing for those applications that need it. Quantum technology is flavor of the month here and, once more, the defense agencies are furthering developments: DARPA with its ACES program, and MOD/DSTL via the Quantum Technology Program, to illustrate just a couple of examples.
So whilst GPS will continue to remain the workhorse, defense PNT is migrating from GPS-only to being a many-faced beast. And I haven’t even gotten started on pseudolites, signals of opportunity, eLoran, and cooperative navigation.
The future of defense PNT looks pretty good to me.
The Vanilla Aircraft VA001 flew for 56 hours recently over Las Cruces, New Mexico (right), setting a new world record for flight duration for its weight class. The airplane is designed to ultimately carry a 30-pound payload at 15,000 feet for up to 10 days without refueling. (Images: DARPA)
On Dec. 2, Vanilla Aircraft‘s VA001 unmanned aircraft system (UAS) completed a world record non-stop, unrefueled 56-hour flight.
The flight was supported by the technology innovation investments of the U.S. Department of Defense’s Rapid Reaction Technology Office (RRTO) and DARPA-funded efforts through Naval Air System Command (NAVAIR 4.11 – Patuxent River).
The VA001 10-day Endurance UAS.
The flight, planned as a 120-hour mission, was ended early because of forecasts of severe icing and range restrictions. However, the airplane landed with enough JP-8 fuel on board for an additional 90 hours of flying, or enough for a total of six days of flight.
The flight was certified as a world-duration record for combustion-powered unmanned aerial vehicles (UAVs) in the 50-500 kilogram subclass (Fédération Aéronautique Internationale Class U-1.c Group 1). A representative from the National Aeronautic Association was present to witness the record. Moreover, the flight was the fourth-longest for any unmanned airplane and the 11th-longest for an airplane of any type (manned or unmanned, solar or fuel-powered).
Originating and ending at Las Cruces International Airport, the flight was conducted under the authority of the New Mexico State University UAS test site designated by the Federal Aviation Administration (FAA).
“This effort represents tremendous and unprecedented coordination among civil, defense, academic, and private industry to bring a heretofore only imagined capability to reality,” said Vanilla Aircraft CEO Rear Adm. Timothy Heely (ret.).
Small unmanned aerial vehicles (UAVs) are an increasingly important means for military forces — especially small dismounted units — to bring extra communications or intelligence, surveillance and reconnaissance (ISR) capabilities to the field. Current designs, however, offer relatively limited range and flight endurance; additionally, their need for frequent refueling, specialized launch and recovery equipment, and regular maintenance often limit them to flying from fixed bases close to the front lines.
“This record-breaking flight demonstrated the feasibility of designing a low-cost UAV able to take off from one side of a continent, fly to the other, perform its duties for a week, and come back — all on the same tank of fuel,” said Jean-Charles Ledé, DARPA program manager. “This capability would help extend the footprint of small units by providing scalable, persistent UAV-based communications and ISR coverage without forward basing, thereby reducing personnel and operating costs. We’re very pleased with what the Vanilla team has accomplished.”
Two VA001 UAVs by Vanilla Aircraft.
The airplane carried 20 pounds of actual and simulated payload, flying at 6,500 to 7,500 feet above mean sea level (MSL), and was a further step for the VA001 towards demonstrating the system’s objective performance of carrying a 30-pound payload for 10 days at an altitude of 15,000 feet.
The payload included a NAVAIR-provided relay and operated continuously throughout the flight to demonstrate functionality out to the maximum range.
The airplane also carried a NASA-provided multispectral imaging payload as a demonstration of Earth science and agricultural remote sensing.
“The VA001 has transformational potential, providing a scalable aerial system solution without increasing personnel or operating costs,” said co-founder and chief engineer Neil Boertlein. “The ability of a low-cost platform to provide persistent surveillance, battlefield pattern of life, or aerial mesh network relay, in a responsive and robust manner, and without forward basing, does not currently exist.”
Vanilla Aircraft is also planning a groundbreaking role for the VA001 in commercial applications, especially in agriculture. Vanilla is exploring strategic partnerships and equity financing to expand into this market.
“The VA001 would be a cost-effective option for widespread and regular low-level surveying,” said co-founder and program manager Jeremy Novara. “We could fill a wide cost and payload-capability market gap between small electric and large military unmanned aircraft, which is perfect for many commercial applications.”
The U.S. Defense Advanced Research Projects Agency (DARPA) has awarded HRL Laboratories LLC $4.3 million to develop vibration- and shock-tolerant inertial sensor technology that enables future system accuracy needs without using GPS.
Positioning, navigation and timing are key to ensuring the location accuracy critical to the success of modern military missions. Today’s military systems typically rely on GPS to ensure position accuracy. While GPS provides sub-meter accuracy in optimal conditions, the signal is often lost or degraded due to natural interference or malicious jamming.
“The ATLAS project will deliver a comprehensive approach to breaking performance and cost, size, weight and power barriers in inertial sensor technology that prevent robust, GPS-independent, military positioning, navigation and guidance,” said Logan Sorenson, principal investigator and research staff member in HRL’s Sensors and Materials Laboratory.
ATLAS will combine intimate locking of a micro-electro-mechanical systems (MEMS) Coriolis Vibratory Gyroscope (CVG) sensor with an atomically stable frequency reference in order to exploit the intrinsic accuracy of the atomic hyperfine transition frequency.
“The engineering challenge lies in developing a system architecture to transfer the stability from the atomic reference to the CVG sensor without introducing unintended noise,” Sorenson said. “We are very excited to explore this novel approach to addressing long-standing precision navigation need faced by the U.S. military.”
HRL Laboratories is located in Malibu, California. It is a corporate research-and-development laboratory owned by The Boeing Company and General Motors specializing in research into sensors and materials, information and systems sciences, applied electromagnetics, and microelectronics. HRL provides custom research and development and performs additional R&D contract services for its LLC member companies, the U.S. government, and other commercial companies.
The Pentagon’s Defense Advanced Research Projects Agency, better known as DARPA, has awarded Raytheon multiple contracts to research and develop technologies that will detect and respond to cyber attacks on the U.S. power grid infrastructure.
The contracts, which total $9 million, were awarded under DARPA’s Rapid Attack Detection, Isolation and Characterization Systems program.
“During the last two decades, industrial control systems have evolved so that most are now connected to the Internet, making them vulnerable to cyber attack,” said Jason Redi, vice president for the Raytheon BBN Technologies Networking and Communications unit. “A significant power disruption would have profound economic and human costs in the U.S, so our goals are to prevent attacks and to reduce the time required to restore power after an attack.”
Raytheon BBN will create technologies to enhance situational awareness by providing early warning of an impending attack and detecting adversary spoofing of power grid data collection and communication. These technologies will also maintain situational awareness in the immediate aftermath of an attack.
The company will also examine methods to maintain secure emergency communication networks in the aftermath of an attack. Raytheon BBN’s approach seeks to isolate affected organizations from the internet and establish a secure emergency network to coordinate power restoration without depending on external networks.
Raytheon BBN Technologies is a wholly owned subsidiary of Raytheon Company.
Soldier-borne sensors, leader-follower cargo-hauling technology and tiny, handheld unmanned aircraft are in the forefront of new technologies planned for U.S. warfighters, according to Maj. Gen. Robert M. “Bo” Dyess. The deputy director of the U.S. Army Capability Integration Center told AUVSI’s Unmanned Systems Defense keynote audience that developing tools and systems demanded by soldiers is key. He cited a recent demonstration exercise, in which soldiers responded enthusiastically to small, backpackable UAS that would let them see over the next hill or fence.
The Army is also developing autonomous ground systems including an unmanned combat vehicle, fully autonomous convoy operations and swarming unmanned aircraft. Autonomous weapons are seen as key in combatting both relatively low-tech guerilla and militia groups as well as high-tech “near-peer” combatants from organized industrial powers. A contested electromagnetic spectrum is emerging as a critical battlefield in the contemporary and future warscape, Dyess said. Cyberspace, racked by fundamental threats of spoofing, jamming and hacking, becomes the new killing ground.
Shad Reese, Tactical Warfare Systems, Unmanned Vehicles coordinator for the Office of the Undersecretary of Defense, said DoD is elaborating a new unmanned systems roadmap, which should be published in the first quarter of 2017. The roadmap will cover the period 2016-2041.
Reese said that a key aspect of the new roadmap is swarming technology, although at present there is little work underway in industry to support this. “Everyone and their mom is talking about swarming, but if you step back and look at what’s going on in industry, there are no real players in industry working on swarming.” Some work is underway in academia, but “we would like to have commercially available swarming technology.”
The Army’s squad mission support transport robot (SMET).
Army’s Ground Robots
The Army has put a robotic vehicle, the squad mission support transport robot (SMET), designed to carry heavy loads for troops, into an accelerated acquisition program. SMET is a 1,000-lb. tracked or wheeled platform carrying rucksacks, water or ammunition. A SMET version was recently tested in Afghanistan.
An Army spokesperson said the SMET has also been chosen as a pilot program a new way to do acquisitions that could shave time off development and fielding of new technologies, with industry involved from the start in specifications and requirements.
Swarms
Hordes of flying, thinking armed robots that autonomously coordinate amongst themselves, altering attack strategies in mid-mission and pushing through to strike targets kamikaze-style, are also seen as critical to future combat. The Air Force Research Laboratory calls the tactical weapons “distributed collaborative systems.”
Three drones work together to beam back information about an enemy’s location, and blocks their radar signals. (Image: DARPA)
The Air Force seeks to put “that next level of decision making and capability on the platform. Not only can it maintain itself, but it can work other parts of the team, whether those be airmen, or whether those be other machines to perform a mission task.”
Swarming micro-drones can be “really fast, really resistant. They can fly through heavy winds and be kicked out the back of a fighter jet moving at Mach 0.9, like they did during an operational exercise in Alaska last year, or they can be thrown into the air by a soldier in the middle of the Iraqi desert.”
“Swarming is a way to gain the effect of greater intelligence without each individual unit needing to be intelligent,” added one strategist. Last year Gen. Ellen Pawlikowski, commander of the Air Force Material Command, called swarming drones “very much a game-changing reality for our Air Force in the future.”
One consultant added that a human operator may not be able to compete with a fully autonomous system that identifies, analyzes and geolocates a target, especially in such a scenario where the swarm is moving rapidly. “The power and the sheer speed of execution would give them a huge advantage over their adversaries.”
Kristen Kearns, autonomy portfolio lead at AFRL, said that a major challenge with any autonomous system is verifying and validating that the decisions it is making are correct. Trust, or “verification and validation,” becomes paramount with artificial intelligence, Kearns added. “How do we assure safe and effective operations when we put decision making in the platforms?”
Steve Walker, deputy director of DARPA, said his agency has been working on developing battle management systems with a blend of manned and unmanned vehicles. “You have humans and unmanned systems and you need data fused together quickly and things are happening fast and you don’t want to overload the human with all that information. … You want to give him or her exactly what he needs to make a decision and have all these distributed effects work together,” he said.
One official noted the presence of many YouTube videos demonstrating robots flying, sailing or moving in formation. “It’s a good illustration of how so much of the advancement in this space is happening outside the defense world.”
As off-the-shelf unmanned autonomous systems (UAS) become less expensive, easier to fly, and more adaptable for terrorist or military purposes, U.S. forces will increasingly be challenged by the need to quickly detect and identify such craft, especially in urban areas, where sight lines are limited and many objects may be moving at similar speeds.
To map small UAS in urban terrain, the U.S. Defense Advanced Research Projects Agency (DARPA) seeks innovative technologies to provide persistent, wide-area surveillance of all UAS operating below 1,000 feet in a large city. While the newAerial Dragnet program focuses on protecting military troops operating in urban settings overseas, the system could ultimately find civilian application to help protect U.S. metropolitan areas from UAS-enabled terrorist threats.
“Commercial websites currently exist that display in real time the tracks of relatively high and fast aircraft—from small general aviation planes to large airliners—all overlaid on geographical maps as they fly around the country and the world,” said Jeff Krolik, DARPA program manager. “We want a similar capability for identifying and tracking slower, low-flying unmanned aerial systems, particularly in urban environments.”
Although several systems are being developed for tracking small UAS by extending surveillance methods used in open areas where large line-of-sight buffers mitigate the threat, these systems are impractical for operation in urban terrain. Aerial Dragnet seeks to leapfrog these approaches by developing systems adapted to the fundamental physics of small UAS in urban environments that could enable non-line-of-sight (NLOS) tracking and identification of a wide range of slow, low-flying threats.
The program envisions a network of surveillance nodes, each providing coverage of a neighborhood-sized urban area, perhaps mounted on tethered or long-endurance UAS. Using sensor technologies that can look over and between buildings, the surveillance nodes would maintain UAS tracks even when the craft disappear from sight around corners or behind objects.
Low Cost Sensors, SDR. The output of the Aerial Dragnet would be a continually updated common operational picture of the airspace at altitudes below where current aircraft surveillance systems can monitor, disseminated electronically to authorized users via secure data links. Because of the large market for inexpensive small UAS, the program will focus on combining low-cost sensor hardware with software-defined signal processing hosted on existing UAS platforms. The resulting surveillance systems would thus be cost-effectively scalable for larger coverage areas and rapidly upgradeable as new, more capable and economical versions of component technologies become available.
The Aerial Dragnet program seeks teams with expertise in sensors, signal processing, and networked autonomy to achieve its goal. A solicitation detailing the goals and technical details of the program was posted here. A Proposers Day took place in late September.
Inertial, Gyroscope Take to Space
The concept image above shows the NEA Scout CubeSat with its solar sail deployed as it characterizes a near-Earth asteroid. (NASA)
Sensonor AS of Norway has partnered with the U.S. National Aeronautics and Space Administration (NASA) to supply current and future low- and near-Earth orbit space missions with inertial and gyroscope modules.
The Norway-based company first began supplying its standard inertial measurement unit (IMU) and gyroscope modules for low Earth orbit (LEO) space applications in 2012, Sensonor’s STIM300 and STIM210 inertial products now fly aboard several NASA spacecraft. Current projects using STIM inertial systems include the Raven technology demonstration and Near Earth Asteroid (NEA) Scout.
Raven, which launched to the International Space Station in September, will test key elements of an autonomous relative navigation system. Its technologies may one day help future robotic spacecraft autonomously and seamlessly rendezvous with other objects in motion, such as a satellite in need of fuel or a tumbling asteroid.
The NEA Scout is a robotic reconnaissance mission that will be deployed to fly by and return data from an asteroid representative of NEAs.
The STIM gyroscope modules are often used in combination with GPS or a Star Tracker and Kalman filter to orient and stabilize the satellite, as well as to provide feedback on satellite motion induced by its reaction wheels. In some applications, the gyroscopes are used to stabilize satellite-to-satellite communications.
Lighting Up Indoors for Retail Position
A new indoor positioning system uses LED lighting to pinpoint location for use in the retail industry. Researchers from the University of South Australia have developed an indoor positioning system that tracks movement with greater accuracy than contemporary RFID and Wi-Fi based systems.
Developer Siu Wai Ho said other methods of indoor positioning such as Wi-Fi were only accurate to within 1–2 metres and were easily hampered by radio frequencies from nearby devices, power sources or other wireless electronics. “Our system is more accurate with an error margin of 10cm and unlike some positioning systems our algorithm can calculate the orientation at the same time.”
LiPo uses LED lights as transmitters and photodetectors as receivers because they are both common items in modern societies. Photodetectors are a key component for capturing light and are also commonly found in smart phone cameras. The system uses a specially designed receiver to measure light intensity that is able to calculate position and orientation. Although it currently requires a unique receiver, developers hope to integrate the technology with the photodectors in mobile phones. This would reportedly enable supermarkets to provide customers with relevant information about items nearby.
“If you are in a supermarket you want to see some information for a product in front of you. One or two metres of error is still too big because it maybe gives you a product you are not in front of.”
Other applications could include the identification of objects or machinery in factories, movement aid tools for the elderly and trackers for museums to provide relevant information to tourists as they passed by exhibits.
Munich SatNav Summit Stresses GNSS Back-Up
“Is it Time for GNSS Back-Up?” has been announced as the the theme of the 2017 Munich Satellite Navigation Summit, to take place March 14–16.International experts gather to discuss recent position, navigation and timing develeopment and the necessity for GNSS backup solutions.
Among the topics, in addition to system updates on all major GNSS, we find listed: From Iridium to e-Loran — GNSS in need for a Backup; Galileo after the Brexit; Civil use of the Galileo Public Regulated Service (PRS); and Network-based solutions for GNSS Backup. Go to to www.munich-satellite-navigation-summit.org for registration information.
Xsens Offers Knowledge BASEd Inertial Motion Tracking
Xsens has launched BASE, an online technology platform with a community forum and a knowledge base on 3D motion tracking technology and products. BASE.xsens.com, contains inside information about micro-electro-mechanical system (MEMS) sensors, inertial measurement units (IMU), sensor fusion algorithms, body-motion tracking and motion capture.
It also provides best practices, tips and tricks for the use of Xsens’ MTi series, the MTw and the MVN wearable motion capture solutions. A second section of BASE is the community forum with direct access to Xsens’ engineers and other Xsens users.
There is no need to register for BASE to access the community forum and the knowledge base. To ask questions or comment on articles, registration is possible via SSO or email.