MicroUAVs Self-Navigate Indoors with Inertial, Cameras, More
The sensor-loaded quadcopters edged around obstacles and achieved target speeds of 20 meters per second in a cluttered Massachusetss hangar, during initial data collection for the U.S. Defense Advanced Research Projects Agency (DARPA) Fast Lightweight Autonomy (FLA) program.
The project develops and tests algorithms to reduce the amount of processing power, communications and human intervention needed for UAVs to accomplish low-level tasks.
If successful, FLA would reduce operator workload and stress and allow humans to focus on higher level supervision of multiple formations of manned and unmanned platforms as part of a single system.
Military teams patrolling dangerous overseas urban environments and rescue teams responding to disasters such as earthquakes or floods currently can use remotely piloted unmanned aerial vehicles (UAVs) to provide a bird’s-eye view of the situation.
But to know what’s going on inside an unstable building or a threatening indoor space often requires physical entry, which can put troops or civilian response teams in danger.
FLA technologies could be especially useful to address this pressing surveillance shortfall by furnishing operatives independent of communication with outside pilots or sensors and without reliance on GPS.
PNT Payload
The platform tested by DARPA researchers uses a commercial DJI Flamewheel 450 airframe, E600 motors with 12-inch propellers, and 3DR Pixhawk autopilot. It carries high-definition onboard cameras and other sensors, such as lidar, sonar and inertial measurement units.
The tests demonstrated autonomous capabilities such as seeing obstacles and flying around them at slow speed unaided by a human controller.
The three performer teams are Draper teamed with the Massachusetts Institute of Technology; the University of Pennsylvania; and Scientific Systems Company teamed with AeroVironment. Flights and data collection took place at Otis Air National Guard Base in Cape Cod, Massachusetts, with simulated walls, boxes and obstacles to test agility and speed.
The tests did produce several crashes. “The only way to achieve hard goals is to push physical systems and software to the limit,” said program manager Mark Micire. Continuing tests will obstruct the venue with more obstacles and clutter. “What makes the FLA program so challenging is finding the sweet spot of a small size, weight and power air vehicle with limited onboard computing power to perform a complex mission completely autonomously.”
Unmanned tactical wheeled vehicles for logistics and route clearance missions provide a significant force protection advantage — removing personnel from targeted vehicles, extending standoff distance from explosives, and empowering a single operator to simultaneously supervise multiple unmanned assets in convoy. This article discusses some of the enabling technologies and the motivations behind them, for safer and more efficient logistics and route clearance operations in a tactical environment.
By John Beck
Unmanned ground vehicles (UGVs) that can semi-autonomously operate over complex terrain represent a promising technological enabler for effective logistics supply and route clearance functions.
Oshkosh Defense has developed autonomous systems for tactical wheeled vehicles (TWVs), working closely with government agencies on autonomous appliqué systems with developed tactics, techniques and procedures that together offer a more efficient and less perilous means to perform critical missions in theater.
The system is designed to be unobtrusive, so that the host platform retains its original mobility, payload capacity, survivability (minimal impact to armor) and manual operation. By upgrading existing fleet vehicles with the capability for unmanned operation, the TerraMax UGV technology can economically and innovatively deliver force protection and force multiplication advantages.
MOTIVATION
Improvised explosive devices (IEDs) pose one of the greatest threats to today’s ground forces carrying out logistics missions in hostile environments. While the up-armoring of tactical vehicles has been effective in reducing casualties, the warfighter remains at risk to the ever-increasing net explosive weights. By fielding UGVs, militaries will be able to remove personnel from TWVs and mitigate the danger of armor overmatch.
To increase efficiency of a reduced force structure, UGVs will serve as force multipliers, enabling a warfighter in a protected vehicle to supervise the coordinated operation of multiple UGVs from a safe standoff distance. These UGVs will be able to operate for extended periods of time, during day and night, and through dust and adverse weather conditions without fatigue or loss of awareness. UGVs will precisely maintain vehicle separation, enabling greater security, improved efficiency and fewer collisions.
Environment Drives Design. To be sustainable in theater, unmanned TWVs must equal their manned counterparts in performance, reliability and mobility in austere tactical environments. For the purposes of overcoming complex terrain, prevailing TWVs are engineered to be capable of feats such as fording 1.5 meters of water and traversing 60% gradients and 30% side slopes.
In addition, these vehicles are expected to operate across broad temperature extremes in dusty, sandy or muddy environments, enduring all manner of precipitation, vegetation and weather conditions. The stringent operational requirements of expeditionary forces influence both individual component selection and overall system design for manned vehicles; the same is true for an unmanned appliqué complement, which must be capable of interpreting and operating in these harsh and complex environments.
ENABLING FULL MOBILITY
TerraMax UGVs are actuated by a tightly integrated drive-by-wire system enabling precise vehicle control using MIL-STD system components to ensure reliability and durability in a tactical environment. It is a safety-critical system that integrates with relevant vehicle components, including steering, engine, brakes, transmission and auxiliary driving functions (such as the central tire inflation system, drive line locks and engine braking), preserving the broad mobility characteristics of the host platform.
The drive-by-wire system both enables higher level robotic control functionality and provides independent benefits in the form of advanced driver assistance system (ADAS) features to benefit manual driving, reducing accidents and collisions.
To facilitate detecting errors absent in an in-vehicle driver’s intuition, the drive-by-wire system communicates with core vehicle diagnostic sensors. It also utilizes add-on sensors that enable monitoring of vehicle and auxiliary subsystem attributes such as hydraulic and pneumatic pressures, ambient and local temperatures, fuel and fluid levels, battery charges and power usage.
All of this data is accessible from the control interface. In addition, threshold values are configured for each monitored sensor such that an operator will be advised if any components exceed warning or critical levels. This ensures that severe conditions do not go unnoticed by an operator, who could be at a distance beyond direct line of sight and may be preoccupied or otherwise unable to dedicate full attention to monitoring multiple UGVs downrange.
Perception Sensors. The TerraMax UGV sensor suite (Figure 1) uses multiple sensor modalities to provide robust sensing capability. The primary sensor for analyzing terrain and obstacles is the high-definition (HD) laser detection and ranging (LADAR), with 64 scanning lasers sweeping 360 degrees.
Figure 1. Sensor suite aboard TerraMax UGV.
In addition, radars are positioned around the vehicle to detect moving obstacles such as other vehicles. Wide-angle cameras are also positioned around the periphery to give a remote operator the ability to visually check vehicle surroundings.
A navigation solution using GPS and an inertial navigation system (INS) supports the ability to drive accurately even with limited GPS signal availability. On the roof facing forward are two cameras used for teleoperation of the vehicle: a wide dynamic range (WDR) camera for daytime use and a short wavelength infrared (SWIR) camera for night operations.
Perception Software. The TerraMax UGV perception software leverages a multi-sensor suite that compensates for the weaknesses of one sensing modality with the strengths of another; for example, relying upon the dust-penetrating ability of automotive radar when LADAR and visible-spectrum camera feeds are obscured.
The perception software uses several modules to interpret the world around it: terrain detection, which assesses roughness of the nearby terrain and informs the selection of appropriate speeds; terrain classification, which distinguishes among foliage, dust or other airborne obscurants and obstacles (Figure 2) and enables traversability appraisals of the surrounding area; and dynamic obstacle detection, which tracks vehicles and dismounts and allows the UGV to exhibit defensive driving behaviors. This software also affords situational awareness and a means for remote supervision of the vehicle by providing processed output for display at the operator control unit.
Figure 2. Perception system display in the TerraMax UGV.
In addition, fused sensor data are combined using novel registration techniques that couple the vehicle’s perception of its surroundings with ground-truth geospatial mapping data to correct for errors in GPS position estimates. This allows the system to be enhanced by, rather than dependent upon, GPS and vehicle-to-vehicle data. Government testing has demonstrated the ability of the TerraMax UGV system to endure complete GPS blackout for more than 19 kilometers with no noticeable impact on mission performance.
Key features of the perception system are:
operable in all environments under all weather and lighting conditions;
installed inconspicuously on the base vehicle and capable of covert modes of operation;
able to deliver reliable system performance under extreme GPS degradation or denial.
Motion-Planning Software. This onboard software takes in an operator’s objectives regarding routing, speed and inter-vehicle spacing as entered during mission planning or on-the-fly. It consequently observes processed sensor data from the perception system and calculates and executes speed and steering commands that guide the vehicle along an optimal path. The motion planning software has been developed with machine learning techniques to emulate smooth human driving behaviors such as avoidance of obstacles and terrain hazards while maintaining appropriate vehicle speed on various terrains.
Key features of the motion planning system are:
intelligent speed and path selection in all terrain, including secondary roads and trails;
capability of sustaining high platform mobility (for example, handling fording and grade climbs);
ability to support high operational tempo (OPTEMPO).
Modes of Operation. When enabled for unmanned operation, a TerraMax UGV can be placed in one of three different modes: semi-autonomous, follower,or tele-operation. The mode selection for each vehicle is controlled from the primary OCU that can be installed in any other tactical or combat vehicle.
In semi-autonomous mode, basic waypoint navigation via GPS coordinates is supported. In addition, mission plans can be created that include information such as check-points, intended vehicle separation distances, speed limits by region, and exclusion zones. These missions are planned from the OCU on a route map that is produced from standard geospatial vector data and predefines the roads on which the UGVs may travel.
This feature, illustrated in Figure 3, allows for on-the-fly mission planning and route changes by selecting “via points” on the road network (similar to a Google Maps functionality) that are automatically connected into a full route plan.
Figure 3. Waypoint navigation.
This requires significantly less effort than manually selecting each individual waypoint for each unmanned vehicle. Once a route has been established, the UGVs traverse the assigned road using their fused global position estimates (leveraging GPS signals as well as the sensor-enhanced map registration to stay on the road) and take advantage of the data link between the vehicles to ensure they maintain prescribed leading and following distances.
In follower mode, no predetermined mission plan is required; a manned vehicle such as the command and control vehicle (C2V) is simply designated as the leader by the operator, and the unmanned vehicles will follow anywhere on the roadway (while still performing intelligent road-keeping and obstacle detection). Two modes of leader tracking are supported: coordinate-based and direct observation.
In the primary mode of coordinate-based following, the lead vehicle transmits its GPS-based position to the follower via the radio data link. The follower vehicle correlates this position to the route map and subsequently appends a waypoint to its upcoming path that would bring the follower to a position on the road directly behind the leader.
In tele-operation mode, an operator assumes remote control of a single UGV and directly commands vehicle speed, steering and other functions via a rugged handheld controller. The operator has a selection of either live video feeds, or an augmented reality view supported by perception data overlaid on aerial imagery, displayed on the OCU display.
OPERATOR CONTROL UNIT
The operator control unit (OCU)hardware and software (Figure 4) are designed to be installed in any other tactical vehicle, along with a low-cost GPS receiver and radio data link that enables communication with multiple TerraMax UGVs from up to 1 kilometer. The OCU allows a single operator to manage coordinated mission command and control of mixed convoys comprised of manned and unmanned vehicles. Route information and convoy behaviors can be pre-planned, saved, loaded and modified as needed during operations.
Figure 4. TerraMax UGV operator control unit.
Touchscreen and function keys allow rapid input using relevant and contextual menus including configurable preset values. Live position and status of each vehicle is displayed on a zoom-able overhead map, and camera feeds from any of the UGVs may be displayed in a familiar picture-in-picture format.
A distilled version of the perception information can be selectively overlaid, aiding the operator’s situational awareness of the vehicles’ surroundings. Remote control and tele-operation is supported using a ruggedized game-style controller for situations when the operator wants direct control of steering and throttle.
TRAINING
Because pre-deployment training opportunities may be limited and any near-term requirement for highly specialized troops is untenable, ease of skill acquisition is critical. In two warfighter experiments for the U.S. Marine Corps Warfighting Lab’s recent Cargo UGV project, the TerraMax system was demonstrated to be operable by veteran motor transport operators after a three-day training course comprising classroom instruction, a realistic desktop simulation environment, and hands-on exercises with the vehicles.
The capstone experiment integrated two TerraMax UGVs into a manned logistics convoy, which was then subjected to a variety of realistic operational scenarios including unexpected road blocks, simulated IED strikes and night operations. Results showed the novice users were able to successfully complete mission objectives using the unmanned systems.
At the conclusion of each of the warfighter experiments for the Cargo UGV project, operators believed they could comfortably control three to five UGVs from a single user interface without suffering cognitive overload.
CONCLUSION
With onboard sensing and decision-making, these unmanned TWVs can provide a force multiplier by empowering a single operator to simultaneously supervise several unmanned assets traveling in convoy, operating semi-autonomously for extended-duration movements. This advantage is significant because it permits more efficient completion of missions by lowering both risk to, and demand for, ground forces.
The procurement, operations and maintenance costs for a robotic capability on TWVs will also be minimized by modernizing existing fleet vehicles with an appliqué kit, but to become viable in theater operations, unmanned TWVs must be able to contend with the same performance, reliability, and mobility in the austere tactical environments as their manned equivalents.
TerraMax UGV technology can be applied to any tactical vehicle and has already been prototyped on the Medium Tactical Vehicle Replacement (MTVR), Palletized Loading System (PLS), Family of Medium Tactical Vehicles (FMTV) and the Mine Resistant Ambush Protected (MRAP) All-Terrain Vehicle (M-ATV).
TERRAMAX HISTORY
Oshkosh has been developing and fully autonomous UGVs since 2003. Among its several generations:
In the 2005 Defense Advanced Research Project Agency (DARPA) Grand Challenge, TerraMax was one of only five vehicles to complete the entire 132-mile course.In 2007, the TerraMax vehicle was one of 11 qualifiers at the DARPA Urban Challenge.In 2012, a second unmanned MTVR was built to evaluate multiple UGVs supervised by a single operator.In 2013, TerraMax UGV M-ATV demonstrated capabilities for route-clearance missions. (Featured on the June 2016 cover.)
ACKNOWLEDGMENT
This article is based on a technical presentation given at AUVSI xPONENTIAL, May 2016 in New Orleans.
John Beck is chief engineer, Unmanned Systems, at Oshkosh Corporation.
The Defense Advanced Research Projects Agency (DARPA) has awarded HRL Laboratories $4.3 million to develop vibration- and shock-tolerant inertial sensor technology that enables future system accuracy needs without utilizing GPS.
While GPS provides sub-meter accuracy in optimal conditions, the signal is often lost or degraded due to natural interference or malicious jamming.
HRL Laboratories, based in Malibu, California, is a corporate research-and-development laboratory owned by The Boeing Company and General Motors specializing in research into sensors and materials, information and systems sciences, applied electromagnetics and microelectronics.
“The ATLAS project will deliver a comprehensive approach to breaking performance and cost, size, weight and power barriers in inertial sensor technology that prevent robust, GPS-independent, military positioning, navigation, and guidance,” said Logan Sorenson, principal investigator and research staff member in HRL’s Sensors and Materials Laboratory.
ATLAS will combine intimate locking of a micro-electro-mechanical systems (MEMS) Coriolis Vibratory Gyroscope (CVG) sensor with an atomically-stable frequency reference in order to exploit the intrinsic accuracy of the atomic hyperfine transition frequency.
“The engineering challenge lies in developing a system architecture to transfer the stability from the atomic reference to the CVG sensor without introducing unintended noise,” Sorenson said. “We are very excited to explore this novel approach to addressing long-standing precision navigation need faced by the U.S. military.”
Keynotes at February’s Inertial Sensors conference summarize initiatives to provide continuous, high-frequency and high-accuracy position spanning GPS outages or obstructions.
GPS-Free. Robert Lutwak, program manager at the U.S. Defense Advanced Research Projects Agency (DARPA), spoke on “Precise Robust Inertial Guidance for Munitions: Navigating in a GPS-free World.”
Over the past decade, the DARPA Micro-Technology for Position, Navigation, and Timing (micro-PNT) program developed low-CSWaP inertial sensors as a backup or “flywheel” PNT solution for GNSS augmentation, validation and holdover in obfuscated environments. New programs, such as the Precise Robust Inertial Guidance for Munitions (PRIGM) program, seek to ruggedize and deploy devices developed under micro-PNT and to extend the performance to support longer and more dynamic mission scenarios. In addition to maturing micro-electro-mechanical systems (MEMS) and atomic technologies developed under micro-PNT, PRIGM is exploring new sensing modalities and architectures, including those enabled by integrated photonics and by the tight integration of photonic and MEMS technologies.
Accuracy One-Thousandfold. Lutwak also gave an overview of DARPA’s new Atomic Clocks with Enhanced Stability (ACES) program. A technology challenge budgeted for up to $50 million, ACES’ goal is to design and build a new generation of palm-sized, battery-powered atomic clocks that perform up to 1,000 times better than the current generation — DARPA’s Chip-Scale Atomic Clock.
The new clocks must fit into a package about the size of a billfold and run on a mere quarter-watt of power. Success will require advances that counter accuracy-eroding processes in current atomic clocks, among them variations in atomic frequencies that result from temperature fluctuations and subtle frequency differences that can occur if the power shuts down and then starts up again.
“It will take a collaboration of teams with skill sets from diverse fields, including atomic physics, optics, photonics, microfabrication and vacuum technology, to achieve the unprecedented clock stability that we seek,” Lutwak said.
MEMS Transition. Stephen Breit, director of engineering for Coventor, gave his predictions for the “Future of the Commodity MEMS Inertial Sensor Design and Manufacturing.”
Emerging trends that could lead to disruptive changes include commoditization of MEMS process technology, consolidation of advanced semiconductor technology, More-than-Moore integration, and the Internet of Things (IoT). These trends motivate industry efforts toward a transition similar to the one that occurred in the CMOS industry: from integrated device manufacturers to a fabless/foundry business model.
This will require a design automation flow that provides a platform for process design kits (PDKs) that foundries can supply to their fabless customers.
Exploiting fingerprints, other smartphone features
Tiny irregularities in an Android or iPhone’s accelerometer can be turned into a unique signature to track users, Stanford researchers found in 2013. These flaws essentially fingerprint an individual smartphone and allow it to be traced. Highly focused activity since then, some of it summarized here, has advanced the frontiers of non-GPS tracking. Developments could prove interesting to privacy advocates, online marketers and law enforcement.
Security researcher Hristo Bojinov demonstrated how, in a matter of seconds, he induced his smartphone to give up its “fingerprints.” Code running on a website in the device’s mobile browser measured the tiniest defects in the device’s accelerometer, producing a unique set of numbers — exploitable to identify and track most smartphones. Marketers could use the ID the same way they use cookies to identify a particular user, monitor their online actions and target ads.
The research team was also able to identify phones using their microphones and speakers. They found they could produce a unique frequency response curve, based on how devices play and record a common set of frequencies.
Amplifiers and Oscillators. A team at the Technical University of Dresden developed a tracking method that exploits variations in the radio signal of cell phones. The collection of components such as power amplifiers, oscillators and signal mixers can all introduce radio-signal inaccuracies.
Bojinov and colleagues presented further work at the RSA Conference 2015, in “Sensor ID: Mobile Device Identification via Sensor Fingerprinting.” Among findings:
We have found ways to construct a device ID by sensor fingerprinting.
All the sensors’ fingerprints may sum up to enough bits to identify all devices.
It is hardware dependent.
It can be used by web application.
A related presentation stated that “this is only the beginning. Many more unexpected information leakages will be found in the coming years. Treat every app you install as having ‘root’ on the phone. And think twice before installing that ‘harmless’ game.”
Engineers at Robert Bosch GmbH in Germany focused on MEMS-based gyroscopes and showed via wafer-level measurements and simulations that it is feasible to use the physical and electrical properties of these sensors for cryptographic key generation, a key requirement for full rollout of the Internet of Things.
Teams from Virginia Tech and the University of Essex have published papers detailing similar approaches, basically turning this vulnerability into a tool. “We prove that device identification can be generated by using the accelerometer found in many pervasive devices,” wrote the Essex researchers. “Our experiments are based on a set of health sensors equipped with a MEMS accelerometer. Periodic readings are obtained from the sensor and analyzed mathematically and statistically to generate a stable ICMetric number.”
Alissa Fitzgerald aided in assembling this overview report.
The Defense Advanced Research Projects Agency (DARPA) is holding a Proposers Day on Feb. 1 to inform potential contractors about the Atomic Clock with Enhanced Stability (ACES) program.
ACES is a potential $50 million program that seeks to develop battery-powered atomic clocks that work to provide warfighters with synchronization and precision timing capabilities during navigation, communications, electronic warfare and reconnaissance missions in the event of a GPS shutdown.
The registration deadline for the Proposers Day is 5 p.m. EST on Jan. 25. The Proposers Day will be held Feb. 1 from 9:30 a.m. to 5 p.m. EST at the DARPA Conference Center, 675 N. Randolph Street, Arlington, Virginia 22203.
The host is Robert Lutwak, ACES program manager at DARPA. In 2012, GPS World awarded Lutwak its Leadership Award for Products.
The meeting will provide information and promote additional discussion on the ACES program, address questions from potential proposers, and provide an opportunity for potential proposers to share their capabilities and ideas for teaming arrangements.
The ACES Proposers Day will include overview presentations by government personnel, technical presentations by potential proposers and collaborators, and an open poster session to facilitate interaction and teaming.
According to the Department of Defense (DoD), “Precision timing and synchronization is essential to DoD communications, navigation, reconnaissance, and electronic warfare systems. The requirements for timing precision and stability have grown increasingly demanding as DoD systems have evolved towards distributed engagement and surveillance architectures, and this trend is expected to continue for the foreseeable future.
“The ACES program aims to develop portable, battery‐powered atomic clocks with stability, repeatability, and environmental sensitivity approaching that of laboratory‐grade cesium beam frequency standards. This will be accomplished through research, development and integration of reduced SWaP components and technologies for advanced atomic physics interrogation techniques. These include, but are not limited to, laser‐cooled and magneto‐optically trapped atomic samples, and RF‐trapped ion samples, as well as interrogation of less environmentally‐sensitive microwave and optical transitions.”
An illustration of Tern, Northrop Grumman’s next-generation unmanned system for maritime ISR and strike. (Image: Northrop Grumman)
The Defense Advanced Research Projects Agency (DARPA) and the Office of Naval Research have awarded Northrop Grumman the third phase of the Tern unmanned systems program. Phase three plans include final design, fabrication and a full-scale, at-sea demonstration of the system.
Tern seeks to develop an autonomous, unmanned, long-range, global, persistent intelligence, surveillance, reconnaissance (ISR) and strike system intended to safely and dependably deploy and recover from small-deck naval vessels with minimal ship modifications.
Designed to operate in harsh maritime environments, Tern aims to enable greater mission capability and flexibility for surface combat vessels without the need for establishing fixed land bases or requiring scarce aircraft carrier resources.
According to DARPA, Tern would use smaller ships as mobile launch and recovery sites for medium-altitude long-endurance (MALE) unmanned aircraft (UAVs). Named after the family of seabirds known for flight endurance — many species migrate thousands of miles each year — Tern aims to make it much easier, quicker and less expensive for the Department of Defense to deploy persistent airborne intelligence, surveillance and reconnaissance (ISR) and strike capabilities almost anywhere in the world.
Ideally, Tern would enable on-demand, ship-based unmanned aircraft systems (UAS) operations without extensive, time-consuming and irreversible ship modifications. It would provide small ships with a “mission truck” that could transport ISR and strike payloads to very long distances from the host vessel. The solution would support field-interchangeable mission packages for both overland and maritime missions. It would operate from multiple ship types and in elevated sea states.
Northrop Grumman’s Tern solution seeks to provide an innovative system that integrates mature and advanced technologies, including a distinctive propulsion solution designed to help expand global persistent ISR/strike capabilities for small-deck naval surface vessels.
“We intend to highly leverage our Unmanned Systems Center of Excellence to develop and demonstrate this type of demanding unmanned systems capability to advance the Navy’s mission,” said Chris Hernandez, vice president, research, technology and advanced design, Northrop Grumman Aerospace Systems. “We believe our unique ship-based unmanned systems experience, expertise, and lessons learned from programs including our MQ-8B/C Fire Scout, MQ-4C Triton, X-47A Pegasus and X-47B UCAS, is critical to the success of the Tern.”
“Using an innovative design that integrates vertical take-off and landing transitioning to an efficient flying-wing for cruise, our team is creating a system that we believe would achieve Tern’s revolutionary performance objectives in support of our combatant commanders,” said Ralph Starace, director, advanced design, Northrop Grumman Aerospace Systems. “Our full-scale demonstrator system is highly traceable to our operational concept to burn down risk, resulting in a compelling step forward for this game-changing, multi-mission capability,” said Bob August, Tern program manager, Northrop Grumman Aerospace Systems.
The Northrop Grumman Tern team includes its wholly owned subsidiary Scaled Composites, as well as General Electric (GE) Aviation, AVX Aircraft Company and Moog.
The X-47B unmanned combat aircraft receives fuel from an Omega K-707 tanker on April 22 while operating in the Atlantic Test Ranges over the Chesapeake Bay. This test marked the first time an unmanned aircraft refueled in flight. The X-47B is a tailless, jet-powered, blended-wing-body aircraft capable of semi-autonomous operation and aerial refueling.
STOIC Technology to Augment or Substitute for GPS
The Defense Advanced Research Projects Agency (DARPA) selected Rockwell Collins to develop technologies that could serve as a backup to GPS. The research, being conducted as part of DARPA’s Spatial, Temporal and Orientation Information in Contested Environments (STOIC) program, aims to reduce warfighter dependence on GPS for modern military operations.
Rockwell Collins will develop new architectures and techniques to enable communication systems that will support time transfer and positioning between moving platforms independent of GPS, with no impact on primary communications functionality.
“STOIC technology could augment GPS, or it may act as a substitute for GPS in contested environments where GPS is degraded or denied,” said John Borghese, vice president of the Rockwell Collins Advanced Technology Center. “The time-transfer and ranging capabilities we are developing seek to enable distributed platforms to cooperatively locate targets, employ jamming in a surgical fashion, and serve as a backup to GPS for relative navigation.”
Borghese added that the goal of the STOIC program is to develop positioning, navigation and timing (PNT) systems that provide GPS-independent PNT, achieving timing that surpasses GPS levels of performance. The program is comprised of three primary elements that, when integrated, have the potential to provide global PNT independent of GPS, including long-range robust reference signals, ultra-stable tactical clocks, and multifunctional systems that provide PNT information among cooperative users in contested environments.
For this third technical element, Rockwell Collins is tasked with developing multifunction communication system solutions that yield DARPA STOIC objective picosecond-accurate time transfer and enable GPS levels of relative positioning accuracy in contested environments.
“Future applications of STOIC technology could include a variety of precision relative navigation operations, such as autonomous aerial refueling and cooperative navigation and collision avoidance within unmanned aerial vehicle swarms,” Borghese said. “It also could support precise time transfer for networking operations in contested environments.”
ELORAN
Wildwood eLoran Tests Continue
The Wildwood, N.J.,eLoran 100-kHz transmitter continuously broadcast a signal from 0900 (EDT) on Oct. 20 through 1800 on Oct. 22, with plans to transmit further eLoran test signals from 0900 (EST) on Nov. 3 until 1200 on Nov. 6, and again from 0900 on Nov. 9 until1500 on Nov. 13.
The purpose of these tests is to gather data on differential Loran performance in the Boston Metro and D.C. Metro areas. “Besides fixed eLoran receivers at our N. Billerica, Mass., and Leesburg, Va., offices, we also have additional fixed eLoran receivers located at the USNO and at the Harris Corporation offices in Herndon, Va.,” stated UrsaNav. The company also plans to gather temporal and spatial decorrelation data in both Metro areas. Note that these signals are for test purposes only and should not be used for any other purpose.
In May, Exelis, UrsaNav, the Department of Homeland Security’s Science and Technology Directorate (DHS S&T) and the U.S. Coast Guard entered into a cooperative research and development agreement (CRADA) for testing and demonstration at former Loran-C sites, including Wildwood. The team will evaluate eLoran as a potential complementary system to GPS.
The sites are the legacy ground-based radio navigation infrastructure of the decommissioned Loran-C service that could be retained and upgraded to provide eLoran low-frequency service.The broadcasts will provide a usable signal at a range up to 1,000 miles.
INERTIAL
MEMS Perspective on SatNav Gathering
By Alissa M. Fitzgerald
In September, I attended the Institute of Navigation GNSS+ 2015 conference, where I chaired a technical session on commercial
micro-electro-mechanical sensors (MEMS). As the founder of a MEMS product development firm, I was eager to gain perspective from the world’s largest technical meeting and showcase of satnav technology, products and services.
Overall, the navigation community is enthusiastic about integrating MEMS into navigation systems. They like the idea of getting more data from small, relatively low-cost sensors. Recently, U.S. Secretary of Defense Ashton Carter declared his wish that we move to MEMS-based position, navigation and timing (PNT) information.
What navigators want from MEMS depends on who they are.
The “high integrity” navigators — the people whose systems land airplanes or steer self-driving cars — would like MEMS sensors with enough performance to enable accurate inertial navigation without GPS for at least 10 minutes. If a GPS receiver can’t see at least four satellites in the sky, it can’t produce accurate navigation data. High integrity navigators are the original developers of sensor fusion systems; they know that no one sensor is perfect, so they design systems to detect loss of a reliable signal, and then adeptly switch between sensor data streams as needed to maintain accurate navigation information. Ten minutes of GPS-independent inertial navigation buys you enough time to get to higher altitudes, out of a tunnel or around a skyscraper, to a position that improves your view of the sky.
The “consumer” navigators — the people who want you to help them find the nearest Starbucks in downtown San Francisco — would like better low-cost MEMS gyroscopes and magnetometers, specifically with improved stability, to improve pedestrian inertial navigation. Although pedestrians are relatively slow-moving compared to vehicles, a key challenge to their accurate navigation is maintaining inertial position fixes while their smartphones unexpectedly change orientation: waving about in a person’s hand or sliding around in a purse or pants pocket.
It’s clear we MEMS people need to spend more time with these end-users, to first understand how MEMS will integrate with their other sensors and GNSS, and then to derive the essential MEMS sensor specifications for each specific navigation system and use case. The quest for seamless navigation has been and will continue to be an exercise in sensor fusion.
Alissa Fitzgerald is managing member, A.M. Fitzgerald & Associates, a MEMS consulting firm serving diverse industries.
Wireless LBS Contributing Editor Kevin Dennehy sits in Delorean connected vehicle on “Back to the Future Day” Oct. 21 sponsored by ITS America.
The battle over when autonomous vehicles will be on the road for consumers seems to be divided along government/big auto companies/academic institutions vs. such technology companies as Google, Uber, Tesla and others. Two recent Washington events highlighted the gulf in expectations for full autonomous vehicle rollout. The question is, why are the two groups so far apart? Funding? Safety? Cyber Security?
WASHINGTON — A panel of business and auto experts discussed the quick rollout of autonomous vehicles and the implications on business and consumer mobility at an Oct. 14 National Press Club meeting here. In terms of the time for consumer rollout, Google founders Larry Page and Sergey Brin attended a DARPA autonomous vehicle challenge in 2007 and determined they didn’t want to wait 15-20 years to roll out a business, said Larry Burns, Univ. of Michigan professor and Google consultant.
Burns said that when he was the vice president of research and development at GM, it would have been hard to convince company execs and lawyers to go ahead with full-blown autonomous technology, while such technology companies as Google are forging ahead.
Burns acknowledged the technology has to work as the automobile is a complicated and sophisticated machine. “Google has driven over a million miles. They have engineers and technicians capture any real-time incidents and take them back to a lab to create computer programs. I can tell you the technology is very close,” he said. “I think we need to get a small fleet on the road in one place, because the technology has to be proven on real roads, to see what human drivers have to deal with. We have the tendency to rush to large volumes because we think it is the answer, but we need to learn on a small scale — and share the data between regulators and legislators.”
While Burns concentrated on the usual story — autonomous vehicles will dramatically decrease worldwide highway fatalities — he said that a new automotive DNA will shape a new market that will focus on the rise of electric vehicles and a sharing economy. “There will be more shared vehicles and the opportunity to created tailored vehicles. Average speeds are 25 miles per hour and most trips are less than eight miles,” he said. “It will change our dependency on oil, land use, parking and access.”
With automated technologies, a car will be able to decrease in size to 1,000 pounds, which allows an electric car’s battery to work more efficiently, Burns said.
Although they do not have an autonomous vehicle strategy, one Domino’s Pizza executive said that the technology would be important for their own fleets, but the franchisees would have to see a return on investment to purchase their own fleet.
“We own supply chain centers and drive 22 million miles delivering food to thousands of stores,” said Lynn Liddle, Domino’s executive vice president of communications, investor relations and legislative affairs. “The pizza industry has not been on the forefront of transportation. When we were founded, the goal was to get pizza to a dorm in 30 minutes. We are now into tech — quick ordering and texting through Ford Sync. Our Australian franchisees are using GPS-enabled systems that allow [customers] to know when their pizza is coming.”
Burns said he could see a two-person pod swinging by a Domino’s, hitting the post office and Fedex as part of the same trip. “The challenge of bringing goods to my door that weigh less than a pound in the last mile is formidable,” he said. “This is an exciting opportunity for the trucking industry. We may see this Class A trucks shortage of truck drivers [go away]. There is a great early opportunity for goods movement with a very good payback.”
One panel member from Securing America’s Future Energy, or SAFE, said the organization is establishing an Autonomous Vehicle Task Force, a group of industry experts that will assess the social, political, market and regulatory challenges of the new technology.
“It’s important to not be dependent on one fuel source, which is run by very high-priced cartels and national oil companies,” said Robbie Diamond, SAFE president and CEO. “This is the first time we have seen the convergence of technology and business models, not just the safety concerns. This is a once-in-a-century opportunity to have a better mobility system.”
Not Everyone Believes Autonomous Vehicles Will Be Ubiquitous By 2020…
Delorean connected vehicle at “Back to the Future Day” sponsored by ITS America.
Some transportation industry veterans don’t buy that the autonomous vehicle will have a quick rollout. While autonomous vehicles are great for short trips, they may not be the solution for families who live in rural areas, said Thomas Dingus, Virginia Tech Transportation Research Institute, at a Capitol Hill panel sponsored by ITS America Oct. 21.
“The bestselling car today is a pickup. Why would you want an automated vehicle if you live in the country?” Dingus said. “Some [autonomous vehicle] adoption will be at a lower rate, some not at all. We will still have drivers on the road. There is no doubt that automated vehicles are coming, but it will be slower than people think.”
Dingus’ Virginia Tech entity is part of the Virginia Connected Corridor Project, which tested autonomous vehicles on two interstate highways in the Washington, D.C., area recently.
One panel topic is the need for better highway infrastructure in order for automated systems to work. Case in point was the problems Tesla has been having with its new lane-control feature because it cannot read the on-the-road markings. “Automated vehicle technology doesn’t work when you don’t have good lane markings. People who said the technology is ready today are wrong,” said Hillary Cain, Toyota director of technology and innovation policy. “We really need to make better investment in our infrastructure.”
Cain also said that the industry is far away from achieving National Highway Safety Testing Administration Level 4, or full self-driving automation. “We are much farther away than we think we are,” she said.
Despite a nationwide shortage of drivers, one trucking industry executive on the panel didn’t seem sold on autonomous vehicles. “The [automated] solution has to be 99.9 percent safe. You have to prove you could have done better than with a human being driving,” said Alan Korn, Meritor WABCO director of advanced brake systems integration.
Also at the panel, Sen. Gary Peters, D-Mich., gave his opinions of the Google car and the new Michigan Mobility Transformation Center, and said the new autonomous technologies will be disruptive to whole industries. “The number-one job at risk is drivers. But the most dangerous vehicle on the highway will be driven by humans,” he said. “I had the opportunity to ride in the Google car, it’s a bit freaky.”
In other news:
Driverless, the Business of Autonomous Vehicles, will be held March 22-23, 2016, at the Crowne Plaza Hotel-San Francisco Airport. More than 30 speakers will discuss worldwide autonomous vehicle markets, safety and security, new technologies and other topics. Go to www.driverlessmarket.com for more information.
Rockwell Collins has been selected by the Defense Advanced Research Projects Agency (DARPA) to develop technologies that could serve as a backup to GPS. The research, being conducted as part of DARPA’s Spatial, Temporal and Orientation Information in Contested Environments (STOIC) program, aims to reduce warfighter dependence on GPS for modern military operations.
Under the terms of the agreement, Rockwell Collins will develop innovative architectures and techniques to enable communication systems that will support time transfer and positioning between moving platforms independent of GPS, with no impact on primary communications functionality.
“STOIC technology could augment GPS, or it may act as a substitute for GPS in contested environments where GPS is degraded or denied,” said John Borghese, vice president of the Rockwell Collins Advanced Technology Center. “The time-transfer and ranging capabilities we are developing seek to enable distributed platforms to cooperatively locate targets, employ jamming in a surgical fashion, and serve as a backup to GPS for relative navigation.”
Borghese added that the goal of the STOIC program is to develop positioning, navigation, and timing (PNT) systems that provide GPS-independent PNT, achieving timing that far surpasses GPS levels of performance. The program is comprised of three primary elements that, when integrated, have the potential to provide global PNT independent of GPS, including long-range robust reference signals, ultra-stable tactical clocks, and multifunctional systems that provide PNT information between cooperative users in contested environments.
For this third technical element, Rockwell Collins is tasked with developing multifunction communication system solutions that yield DARPA STOIC objective picosecond-accurate time transfer and enable GPS-levels of relative positioning accuracy in contested environments.
“Future applications of STOIC technology could include a variety of precision relative navigation operations, such as autonomous aerial refueling and cooperative navigation and collision avoidance within unmanned aerial vehicle swarms,” said Borghese. “It also could support precise time transfer for networking operations in contested environments.”
DARPA is looking for technology communities that can team to provide expertise and innovation for small sensors, expendable and small unmanned systems, and distributed communications and navigation technology.
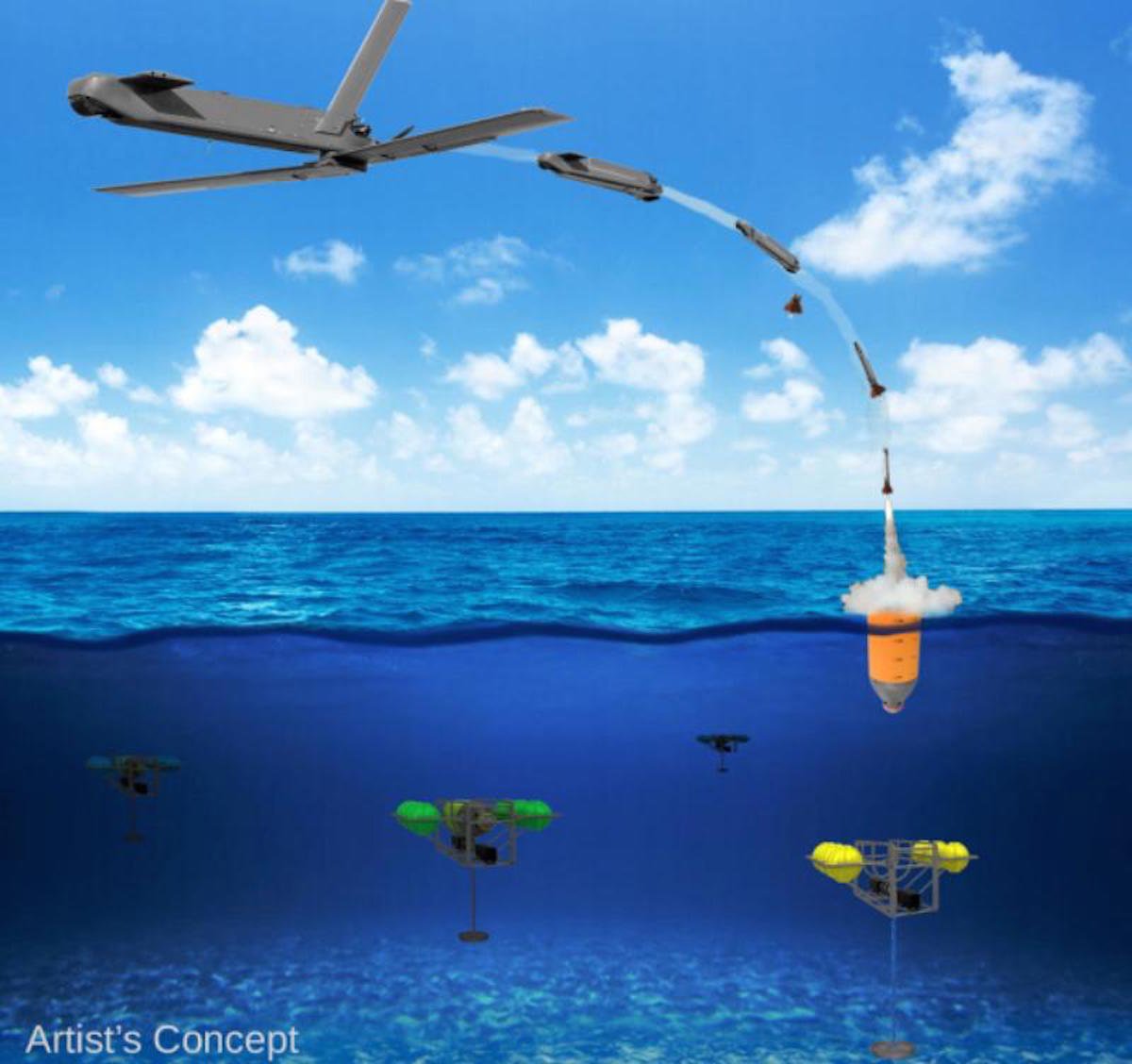
The Defense Advanced Research Projects Agency (DARPA) is researching a drone that can hibernate on the ocean floor for years at a time before being launched to the surface and into the air.
The “Upward Falling Payload” (UFP) concept centers on developing deployable, unmanned, nonlethal distributed systems that lie on the deep-ocean floor in special containers for years at a time. These deep-sea nodes could be remotely activated when needed and recalled to the surface. As DARPA terms it, they “fall upward.”
The new drones are part of a new focus by the U.S. military to develop and improve technology for emerging threats. “Today, cost and complexity limit the Navy to fewer weapons systems and platforms, causing strain on resources that must operate over vast maritime areas. Unmanned systems and sensors are commonly envisioned to fill coverage gaps and take action at a distance. However, power and logistics to deliver these systems over vast ocean areas limit their utility. The Upward Falling Payload (UFP) program intends to overcome these barriers,” DARPA said on its website.
DARPA’s statement continues: “Nearly 50 percent of the world’s oceans are deeper than 4 km, which provides vast areas for concealment and storage. As a consequence, the cost to retrieve UFP nodes is asymmetric with the likely cost to produce and distribute them to the seafloor. Concealment provided by the sea also provides the opportunity to quickly engage remote assets that may have been dormant and undetected for long periods of time, while its vastness allows simultaneous operation across great distances. Getting close to objects without warning, and instantiating distributed systems without delay, are key attributes of UFP capability.”
The UFP system would have three key subsystems:
The payload, which executes waterborne or airborne applications after being deployed to the surface
The UFP riser, which provides pressure tolerant encapsulation and launch of the payload
The UFP communications, which trigger the UFP riser to launch.
The program would need to demonstrate a system that can:
survive for years under extreme pressure
be triggered reliably from standoff commands
rapidly rise through a water column and deploy its payload.
The drones wouldn’t require fuel, as they would be powered with energy generated by ocean currents. Ocean drones would be difficult to manufacture, however, because researchers would need to figure out how to activate the drone, how to help the drone breach the surface, and make sure the drone is protected in salt water for long periods.
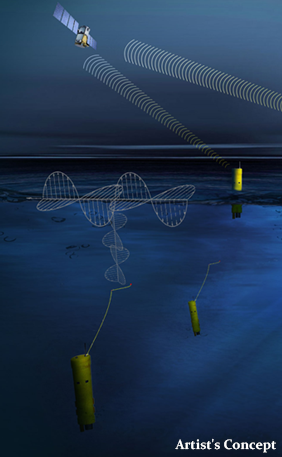
This artist’s concept shows a potential communications application of an upward falling payload. (Credit: DARPA)
Phase 2. The program is completing its first phase and is about to enter its second. During Phase 1, DARPA supported more than 10 study and design efforts to figure out approaches for long-range communications, deep-ocean high-pressure containment, and payload launch. The study teams also addressed a variety of missions for the payloads.
“In this first phase, we really learned about how the pieces come together, and built a community of developers to think differently about unmanned distributed solutions for the maritime domain,” said Andy Coon, DARPA Program Manager for the effort. “The trick is to show how these systems offer lower-cost alternatives to traditional approaches, and that they scale well to large open-ocean areas.”
In the next Phase, DARPA intends to learn from the studies, and develop and demonstrate prototype systems. DARPA is seeking teams to develop UFP nodes that combine expertise in both deep-ocean engineering and advanced payload development.
“We’re also looking for the communications technologies for these nodes. As long as you can command the nodes remotely and quickly, and don’t have to send a ship out to launch it, you’re in good shape. Some Phase 1 approaches were more exotic than others, but we were pleased by the range of challenging options,” said Coon.
In today’s fiscally constrained environment, such a system of pre-positioned, deep-sea nodes could provide a full range of maritime mission sets that are more cost-effective than existing manned or long-range unmanned naval assets.
For Phase 2, DARPA is particularly looking for technology communities that can team to provide expertise and innovation for small sensors, expendable and small unmanned systems, distributed communications and navigation technology, novel long-range underwater communications, and long-endurance mechanical and electrical systems that can survive for years in dormant states.
Report on the 14th meeting of the National Space-based PNT Advisory Board in Washington, D.C., held December 10-11, 2014.
By Ron Hatch
Ron Hatch
The December meeting of the PNT Advisory Board meeting brought forth important developments and proposals for the protection of GPS as part of the U.S. critical national infrastructure. A separate presentation made by speakers from the National Telecommunications and Information Administration (NTIA) and the Federal Communications Commission (FCC), concerning possible limitations on the use of signals from other GNSS, generated some controversy, alarm, and extensive follow-on discussion by industry, users, and other concerned parties.
Critical Infrastructure. Perhaps the most important presentation was that of Brad Parkinson, the acting chair, in his recap of the recommendations to be made by the Advisory Board to the PNT EXCOM.
The first recommendation was a reiteration of the Advisory Board opinion that the GPS be designated as one of the “critical infrastructures” of the United States. This opinion was based upon the fact that 14 of the existing designated critical infrastructures involves the use of GPS. The feeling was that such a designation would enhance the attention focused upon ensuring GPS reliability.
A second recommendation was that a comprehensive threat assessment to GPS operation be generated that can be used to assess its vulnerabilities. The remaining recommendations to the EXCOM were based upon the results of studies by the two working groups that were presented next.
The two working groups of the advisory board, specifically the “Assured Availability” and the “Economic Value of PNT” working groups, gave the next set of presentations. The Assured Availability working group was split into three sub-groups. The three aspects addressed were to “Protect,” “Toughen,” and “Augment.” The Protect working group recommended action to encourage the reversal of European initiatives to authorize pseudolites that broadcast within the GNSS L1 frequency band. Since such pseudolites would constitute authorized interference to standard GNSS receivers, it was recommended that our State Department encourage a reconsideration of the pseudolite proposals and that they be constrained to operate on a frequency outside the L1 frequency band.
The Toughen working group looked at a number of measures by which GNSS receivers could be improved to better withstand intentional and unintentional interference. Phased array antennas, inertial aiding and various software tracking improvements were discussed. An invited presentation by Gary McGraw of Rockwell addressed some of these issues particularly from a military perspective. An additional invited presentation upon the requirements for precise time-keeping in trading of financial transactions was presented by Andrew Bach.
The Augment working group discussed a number of ways in which the GNSS capabilities could be augmented. Prior recommendations that eLoran should be maintained as a backup was again strongly recommended. In addition, the ability to track other GNSS satellites in addition to GPS satellites was encouraged, even though it was recommended that special precautions and automated checks needed to be implemented in the light of the system failures that have been noted with the GLONASS satellites. A very interesting invited presentation by Robert Lutwak of the Defense Advanced Research Projects Agency (DARPA) described the continuing progress toward higher precision inertial sensors.
The second working group, the Economic Value of PNT, reported on firmed up plans to strengthen the existing studies of the economic value of PNT by engaging the economists resident within the various cabinet departments within the EXCOM to which the Advisory Board reports. The detailed plans were given in a presentation by Irv Leveson that outlined the plans for “A Comprehensive Quantitative Economic Assessment of GPS.”
It is not my intention to slight any of the other presentations, but I felt two of the remaining presentations were very important. Specifically, the presentation by Karen Van Dyke on Department of Transportation plans regarding “Adjacent L-Band Compatibility and GPS Signal Monitoring” was very encouraging. Among other items, it indicates that adjacent band-power limits will be carefully analyzed and tested to ensure that all existing applications of GPS will not be harmed.
FCC on International Signal Use. The second presentation that I felt was very important was by Paige Atkins of the National Telecommunications and Information Administration (NTIA) and Ronald Repasi of the Federal Communications Commission (FCC). Their presentation was titled “NTIA/FCC Spectrum Management Perspectives.” The presentation covered the background and intent of the various authorizing legislation. There were, however, some disturbing comments made.
Specifically, the item on the slide about National Space Policy that had a major bullet: “Guidance to all departments and agencies – ‘maintain and enchance’ space-based PNT systems. To this end the U.S. shall (among other things)…” There were two sub-bullets.
The first addressed GPS protection as a critical infrastructure component. The second sub-bullet stated “Foreign PNT services ‘may be used to augment and strengthen the resiliency of GPS.’” The verbal transcript is not yet available, but it seemed to me that Ron Repasi minimized this statement by indicating that resilience was subject to interpretation.
The real alarm was in his following comments during the question-and-answer discussion, where he indicated that the use of GLONASS within U.S.-based receivers was not authorized and that, therefore, the frequency band they used was not necessarily subject to protection. In addition, it was indicated that three years ago, procedures were developed whereby one could apply for authorization to the use the GLONASS signals. To date, Ron Reposi indicated that no organization had applied for authorization to use GLONASS, and that therefore it was currently illegal to use it.
Significant discussion was generated by the above, both following the presentation and the next day in a recap. From the discussion, it appears that a March 2011 regulation outlining the requirements for authorization of receiving “Earth stations” is being interpreted by the FCC as requirements for authorization of GLONASS receivers.
[Editor’s note: The process for securing a waiver of FCC regulations requiring authorization to receive international RNSS satellite signals was identified in an FCC Public Notice released in 2011. This process is initiated by National RNSS System providers, which have the satellite information needed to secure a waiver. Members of the GPS Innovation Alliance (GPSIA, www.gpsalliance.org, formerly the U.S. GPS Industry Council) have stated that they remain fully committed to producing multi-GNSS signal user equipment consistent with U.S. policy, and to working with the FCC and NTIA in considering these requests.]
In light of the multitude of GLONASS receivers already in use, including a number of U.S. government and agency receivers, the discussion was primarily on what should be done next. The decision taken was not to panic, but to bring the problem to the attention of the various government departments represented on the EXCOM and proceed with some caution.
The possibility was raised that NASA, in conjunction with the State Department and other interested parties, could seek a blanket authorization to use GLONASS within GPS receivers. This was discussed and presented as a possible way forward. Clearly, the issue is one that will be followed with great interest.
The Defense Advanced Research Projects Agency (DARPA) is asking for input on how to launch and recover multiple small unmanned air systems (UAS) from existing large aircraft, such as the C-130. It has issued a Request for Information (RFI) seeking technical, security and business insights on “aircraft carriers in the sky.”
In DARPA’s “blended approach,” a large aircraft would host a small UAS and facilitate its operations. The agency says it would be more cost-effective for intelligence, surveillance, reconnaissance (ISR) and other missions.
Safety is another key aspect of the project. While small UAS can reduce putting an aircraft or pilot at risk, DARPA says it may lack the speed, range and endurance of larger aircraft.
“We want to find ways to make smaller aircraft more effective, and one promising idea is enabling existing large aircraft, with minimal modification, to become ‘aircraft carriers in the sky,’” said Dan Patt, DARPA program manager. “We envision innovative launch and recovery concepts for new UAS designs that would couple with recent advances in small payload design and collaborative technologies.”
The RFI is calling for short responses — no more than eight pages — that must address the following three areas:
System-level technologies and concepts that would enable low-cost reusable small UAS platforms and airborne launch and recovery systems that would require minimal modification of existing large aircraft types. This area includes modeling and simulation as well as feasibility analysis, including substantiating preliminary data if available.
Potentially high-payoff operational concepts and mission applications for distributed airborne capabilities and architectures, as well as relative capability and affordability compared to conventional approaches (e.g., monolithic aircraft and payloads or missile-based approaches). DARPA hopes to leverage significant investments in the area of precision relative navigation, which seeks to enable extremely coordinated flight activities among aircraft, as well as recent and ongoing development of small payloads (100 pounds or less).
Proposed plans for achieving full-system flight demonstrations within four years, to assist in planning for a potential future DARPA program. DARPA is interested not only in what system functionality such plans could reasonably achieve within that timeframe, but also how to best demonstrate this functionality to potential users and transition partners. These notional plans should include rough order-of-magnitude (ROM) cost and schedule information, as well as interim risk reduction and demonstration events to evaluate program progress and validate system feasibility and interim capabilities.
According to a news release by DARPA, technology development beyond the three areas will be considered if it supports the RFI’s goals.
Proposals are due by 4 p.m. ET on Nov. 26, 2014, to [email protected].