Low-Earth-orbit signals add increased signal strength, geometry diversity and robustness to GNSS.
U-blox, a global leader in positioning and short-range communication technologies for automotive, industrial and consumer markets, is exploring how the introduction of low-Earth-orbit (LEO) signals can complement and integrate with existing GNSS to support mass-market positioning solutions.
The announcement comes following the launch of the European Space Agency’s (ESA) first Celeste LEO-PNT demonstration satellites (IOD-1 and IOD-2) on 28 March 2026, marking a key milestone in bringing LEO-based signals into the operational positioning environment and ESA’s first step toward extending satellite navigation into low Earth orbit.
As the positioning ecosystem evolves, LEO-based signals are emerging as a complementary layer to established GNSS. Designed to augment systems such as Galileo, LEO satellites introduce a new building block characterized by lower orbital altitude, increased signal strength, and rapidly changing satellite geometry. GNSS remains the foundation of global positioning, delivering proven coverage and consistency at scale.
This evolution is not only about additional signals, but about how positioning systems behave over time. The dynamic geometry of LEO satellites introduces new system characteristics that influence convergence speed, robustness, and performance in challenging signal conditions.
Under its Navigation Innovation and Support Program (NAVISP) Element 2 (EL2) project, co-funded by ESA, u-blox is conducting a technical assessment of the role of LEO signals in multi-layer positioning architectures. This work forms part of a broader effort to bring LEO-PNT capabilities to mass-market GNSS receivers, combining emerging LEO signals with established GNSS systems.
This includes early integration work on u-blox’s X20 GNSS platform, exploring how different signal types and frequency bands can be optimally incorporated into u-blox’s positioning systems. The scope of work includes:
Observation and characterization of emerging LEO signal transmissions
Analysis of interactions between LEO signals and GNSS measurements
Evaluation of the impact of dynamic satellite geometry on positioning performance
Exploring different system-level approaches for integrating LEO signals into future platforms
“U-blox is committed to advancing positioning technologies through focused research and collaboration,” said Jani Käppi, head of technology positioning at u-blox. “Our work within the ESA NAVISP framework allows us to better understand how emerging signal sources can complement GNSS and contribute to robust and reliable positioning performance.”
U-blox expects to contribute to the development of the new LEO satellite ecosystem with significant innovation in the positioning solution, collaborating with key partners like ESA.
The Celeste initiative
The Celeste mission is ESA’s initiative for LEO-PNT (Low Earth Orbit Positioning Navigation and Timing) and is in its in-orbit demonstration phase. This first phase features a demonstration constellation of 11 satellites that will fly in low Earth orbit to test innovative signals across various frequency bands. Its goal is to advance satellite navigation concepts for resilient positioning and timing services.
The Celeste in-orbit demonstration phase was approved at ESA’s Council at Ministerial Level of 2022. The fleet is being developed through two parallel contracts respectively led by GMV in Spain with OHB in Germany as core partner, and by Thales Alenia France as prime and Thales Alenia Italy as space segment responsible and involving over 50 entities from more than 14 countries.
Celeste was further supported in ESA’s Council at Ministerial Level of 2025 (CM25), towards the implementation of the next phase: the LEO-PNT In-Orbit Preparatory phase.
Celeste also contributes to one of the three core pillars of ESA’s new European Resilience from Space (ERS) initiative, endorsed at CM25. ERS addresses critical security and resilience needs for Member States while laying the groundwork for future European strategic space capabilities.
CHC Navigation has announced major updates to its i93, i85 and i76 GNSS receivers, as well as the iBase professional base station. The updates are designed to further improve positioning stability, simplify field setup, and expand operational capability across demanding surveying environments.
Enhanced RTK performance with the CHCNAV StellaX GNSS chip The updated i93, i85 and i76 receivers integrate the CHCNAV StellaX GNSS chip with multi frequency signal tracking and advanced anti interference mitigation. This design is intended to support more reliable GNSS RTK positioning and more consistent data collection in complex terrain and in areas with partial GNSS satellite visibility.
PointSky GNSS corrections service for remote surveying To reduce reliance on cellular networks and local radio links, the updated i93 and i85 now include a one-year standard subscription to the CHCNAV PointSky service. PointSky delivers GNSS corrections via satellite, enabling users to reach a 2.5 cm precision fix in three to five minutes. This capability supports surveying operations in remote locations such as mountains, forests and deserts where network coverage can be limited or unavailable.
Longer range radio operation and simplified iBase startup The iBase base station now integrates CHCNAV DistLink technology and improved data compression to increase radio sensitivity and support up to 30 km coverage for linear projects such as highways and railways. Power consumption has also been optimized to support more than 13 hours of continuous operation without external batteries. To streamline setup, iBase includes a one button startup sequence designed to automatically pair with rover units, reducing the need for manual parameter configuration in the field.
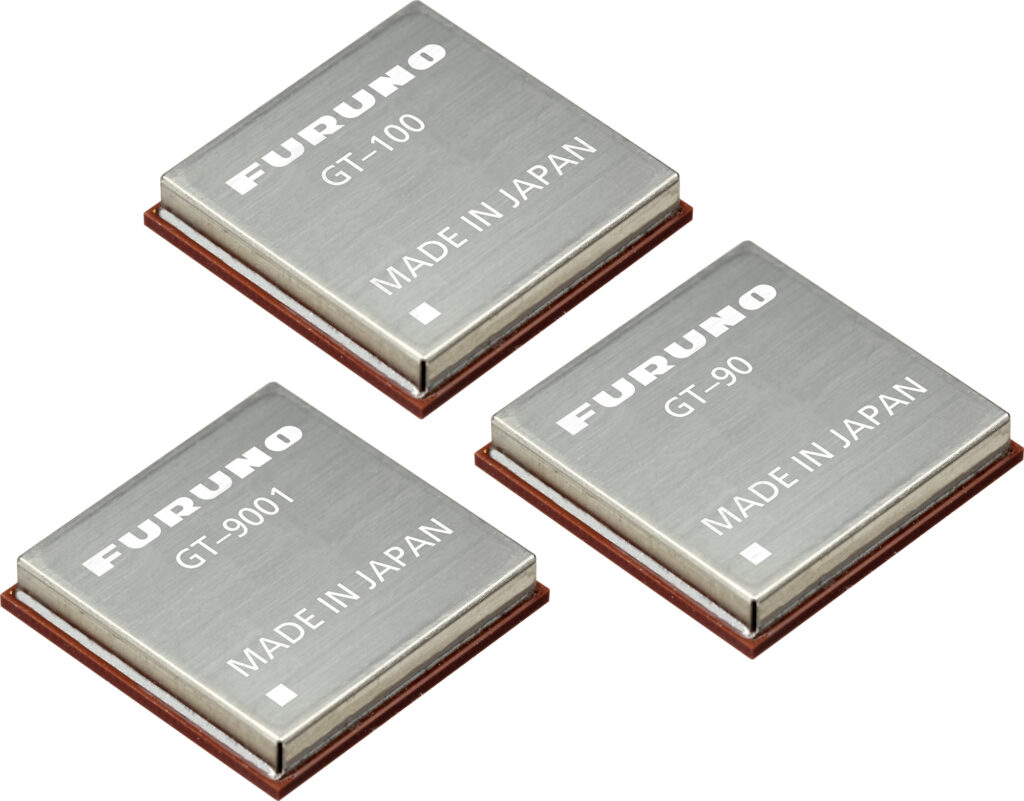
Furuno will begin providing new firmware for its GNSS receivers for time synchronization, including models GT-100, GT-90 and GT-9001, which adds authentication features (OSNMA/QZNMA) and significantly strengthens anti-jamming and anti-spoofing measures.
In fields that support critical infrastructure such as telecommunications, finance and power, GNSS vulnerabilities have become a major issue. The Furuno team participated in Jammertest 2025, the world’s largest GNSS resilience testing event. Jammertest 2025 took place in Norway, and verified robustness and reliability under real attack conditions to meet the requirements of critical infrastructure.
Features of the new firmware
The GT-100, GT-9001 and GT-90 modules. (Photo: Furuno)
Addition of authentication functions (OSNMA/QZNMA): Authentication messages from Galileo (European GNSS) and QZSS (Japan’s Quasi-Zenith Satellite System) confirm the authenticity of navigation messages, strengthening resistance to spoofing attacks.
Enhanced anti-jamming and anti-spoofing measures: Detect and eliminate various interference signals with high precision, ensuring stable time synchronization.
Removal of altitude restrictions, enabling use in the stratosphere and similar environments
Addition of TAI (International Atomic Time) output function
Support for multiple data formats (RTCM10403.3, RINEX4.1, binary)
Availability For existing users: Provided as a firmware update.
For new shipments: GT-100, GT-90 and GT-9001 with the new firmware are scheduled to ship beginning in March 2026.
Related product information Furuno has also launched the GNSS Surge Protector, TVA-05V for GNSS antennas. This product protects GNSS receivers from surges caused by lightning, further enhancing the stable operation of critical infrastructure.
In Jammertest 2024, challenges were identified using GT-100; in Jammertest 2025, improvements were validated with the upgraded version, confirming the effectiveness of the resilience algorithms under operational conditions.
High-Q ceramic bandpass filters present a technical opportunity to build jamming-resistant GNSS receivers for mission-critical applications, according to a blog by Knowles Precision Devices.
Bandpass filters play a critical role in mitigating GNSS jamming by isolating legitimate satellite signals from interference. These filters are designed to allow frequencies within the GNSS operational bands (GPS L1/L2, Galileo E1/E5) while attenuating out-of-band noise and intentional jamming signals.
With their low cost and compact form factor, surface acoustic wave (SAW) filters are a natural fit for GNSS receivers, but they struggle in high-interference conditions due to limited out-of-band rejection and broader skirts, Knowles’ Peter Matthews explains. While SAW filters continue to meet performance requirements for consumer devices and systems, high-Q ceramic filters offer a robust upgrade for mission-critical applications needing mechanical and thermal stability, predictable tuning characteristics, and long-term reliability.
Image: Knowles
Q factor is used as shorthand figure of merit (FOM) for RF filters. In short, Q factor is expressed as the ratio of stored versus lost energy per oscillation cycle. It describes specifications like the steepness of skirts (that is, the selectivity) and insertion loss. Overall, losses through a resonator increase as Q factor decrease and will increase more rapidly with frequency for lower values of resonator Q.
Sharp Skirts: Enable precise filtering near the band edges.
High Rejection: Attenuates out-of-band signals and jammers.
Low Insertion Loss: Preserves the integrity of weak GNSS signals.
These attributes are especially important in military and aerospace platforms where GNSS must function reliably in the face of hostile electronic countermeasures. High-Q ceramic filters enable precise frequency discrimination, ensuring that only legitimate GNSS signals reach the receiver.
“Consider a drone conducting reconnaissance in a contested area or an autonomous harvester navigating with sub-inch precision on a farm,” Matthews explained. “Both scenarios require high signal clarity. Knowles’ high-Q ceramic filters, like the GPS L1, are engineered for use in L-band GNSS applications. These filters demonstrate low passband insertion loss (<2.0 dB), high out-of-band rejection (up to 40 dB), and compact dimensions, making them ideal for both portable and embedded systems.
Knowles offers a range of high-Q ceramic filters. See the GPS L1 filter datasheet for detailed specifications.
Guidance and precision control, the base elements of modern machine control for construction, have continued to evolve since broad productization began in the mid-1990s. However, the value proposition has become even sweeter since, with value being realized beyond the return on investment (ROI) of the general contractors and the total project price tag for the clients. While the majority of equipment globally is still non-digital, new levels of simplicity and affordability are helping to fill that gap.
The roots of machine control stretch back a century. The Historical Construction Equipment Association (HCEA) posits that the A.W. French & Co. “utility grader” of the 1920s, a crawler-mounted unit that used stringline control, may be the very first example — and this before electronics and computing. However, it was the advent of real-time kinematics (RTK) for GPS in the mid-1990s that brought machine control as we know it to the construction site, and coincidentally to precision agriculture.
Initially, the focus was on guidance. Then it moved to precision control, such as blade control, and later propagated to more classes of motorized equipment, improved with further sensor integration.
The impact on construction and agriculture has been undeniable: productivity gains, less rework, more efficient handling of materials, shorter timelines, site safety improvements, and more. These benefits are as obvious to clients and operators as they were in the early days of adoption, gains from nearly three decades of innovation.
What form have these growing benefits taken, and who is realizing them? We sought insights from industry experts to find out.
Grading and Excavation
Automation is not just about speed; it is also about better control of the load and stress on the equipment and moving just the right amount of materials so as not to place a burden on it. (Photo: CHCNAV)
These two activities, as each of our interviewed experts attest, represent the lion’s share of realized productivity gains.
While not the complete picture of overall value, the sheer volume of equipment that has been, or could be, automated speaks, well, volumes. “Apart from the skid steer systems, there are more excavators manufactured than all the other equipment types combined,” said Daniel Sass, product manager of machine control at Hemisphere GNSS. “Excavators are the workhorse. And people use them differently, and they use other pieces of equipment to complement excavators somewhat differently. Certainly, the bulk of our sales is excavators, and in fact a key part of our value proposition is focused on compact machines, but also all the way up to mining shovels. Certainly, by volume it is excavators and compact excavators.”
Numbers help tell the story. “In the United States, at least in a three-year period from 2019 to 2022, about 253,000 excavators were sold, for which I have pretty reliable data, but only 61,000 dozers and only 7,000 scrapers,” Sass said. “That’s North America, where we also use a lot of dozers and scrapers. If you go to Europe, where they use excavators for many other tasks, the proportional impact might be higher.”
Operators can easily gauge the ROI of going digital for individual pieces of equipment such as excavators, but part of the incentive could be that general contractors are requiring subcontractors to be equipped and ready to fit into a more complete digital site. “Some definitely require it,” said Randy Noland, vice president of global sales at Hemisphere GNSS. “A lot of … larger sites. I wouldn’t say everybody mandates it yet, but that it is growing.”
“Operator assistance is not only helping someone cut to grade faster, but is also the best way to cut to grade,” said Cameron Clark, earthmoving industry director, Trimble Civil Construction. “How do you move the material? That directly ties into productivity by only moving the material you need to move, which also equates to less fuel because you can do it faster.” With operator assistance, Clark said, it is not uncommon to see productivity gains of 30% to 40%, even with inexperienced operators. And with automatics, this could exceed 75%, depending on the work done.
There are substantial gains to be made in operator assistance for less complex heavy equipment, such as compactors. “Often a contactor will put a less experienced operator in the compactor,” Clark said. “In manual days, to overcome the potential of under-compaction and missing spots, they’d create quite a big overlap, maybe up to 40% of overlap between paths. By adding steering control, we can automate the compactor to where it needs to be — to stay on line every day, all day. And you can reduce the overlap to 10% or 15%; having to compact a smaller area means that you’re quicker, say 30% quicker.”
“Grade control gains can be 30% to 50%,” said Magnus Thibblin, president, machine control division, Hexagon Geosystems. “Depending on the machine and the job application, and how experienced the crew is, it can be similar for excavators.” Thibblin was an end user from the early days of machine control. He saw its potential and how it might work better. Its benefits came not just from automating elements of the equipment, he said, but from implementing a more complete digital workflow.
“How much are you working with the digital design from the start?” Thibblin said. “I’m one of those who believes you should have 3D from the start; for any kind of layer that the machines can build to. Incidentally, in North America, working to models is implemented for a lot of graders and dozers. In Europe, there is a large excavating market, but it’s the same foundation. If you work from the design, you will have savings in fuel, time, efficiency, safety, etc. Depending on all of these things, the total value proposition may be 30% to 70%.”
Wenming Sun, vice general manager for digital construction, CHCNAV, reiterates these points. “Currently, our machine control solutions are mainly installed on earthmoving machines, including bulldozers, excavators and motor graders,” Sun said. “The greatest value of these solutions is to improve construction efficiency, shorten construction time, reduce fuel consumption and mechanical wear while ensuring construction quality.”
CHCNAV is a relatively new player in the construction machine control market, launching initially in Europe and Asia. The company has been developing automation and steering systems for equipment that can yield the highest gains for their customers. “For example, our 3D TG63 automatic control system for motor graders can double efficiency compared to manual operation of machines and reduce time by 50% for the same workload,” Sun said.
Getting to the designed grade, or trench line, of earthworks geometry faster is a huge benefit, while reducing or removing finishing steps is a bonus. “Now we’re seeing that with excavators that have automatics, the finishing we can get out of an excavator is amazing,” Clark said. “You used to get dozers cleaning up after excavators. Now, with the performance you can get with an automatic excavator, you often don’t need to run the dozer — the excavator can get it done the first time.”
However, dozers are used for many other tasks. Clark noted that about 95% of blade-control systems for dozers sold have automatics. He said grade control brings tremendous productivity gains, but that excavation is right up there as well. “When you look at the number of machines out there, it’s in a different league,” Clark added. “In 2021, for example, globally about 370,000 crawler excavators and 325,000 mini excavators were sold.”
Lateral Benefits
GNSS has revolutionized automation for many classes of heavy equipment. However, for certain high precision work, particularly finished elevations, site levels and totals stations are essential. (Photo: Hexagon)
For the general contractor, ROI is a key measure. This can be reasonably easy to gauge, as this ROI calculator shows: intelligent-construction.com/roi-calculator/. However, what matters is not just the upfront time and cost for grading and excavating, but also avoiding lateral time and costs. “If you can do jobs faster and more accurately, it lends itself to less rework,” Clark said. “You do it right the first time, which again goes into less fuel, and then also less material. For example, let’s say your excavator is digging down to a trench and the operator digs too deep, which happens often. That material dug out of the trench potentially needs to be carted away. So, extra fuel and trucks are needed to take the material away. They’ve got to put high quality material back in, so that means they actually have to cart more material back to put in the trench, and you have to spread the material.
Again, it’s a flow-on effect — a chain reaction. When you look at sustainability, what we do has direct and indirect effects — it’s 1 gallon of fuel you don’t use that saves about 22 pounds of carbon emissions.”
The green dividend goes beyond just what individuals and firms wish to see. Increasingly, infrastructure developers and owners may be subject to sustainability requirements. Depending on where the work is being done, sustainable development goals are being acted on. This includes not just the environmental goals, but also requirements for the digitalization of design and construction, and ultimately smarter and more sustainable infrastructure. Machine control in construction can deliver some of the most substantial benefits in meeting these goals.
Like overall value for the operators and clients, gauging the highest green dividend becomes a proposition of sheer volume. “On average, your dozer is going to burn much more fuel. However, we sell four times as many excavator solutions as we do for dozers,” said Miles Ware, vice president of marketing and global customer care, Hemisphere GNSS. “The excavator solution is critical for both an ROI and an environmental impact.” Among the most-sold excavators in the United States are the Kubota 4-ton, the John Deere 3.5-ton and 5-ton, and the Caterpillar 5-ton. “The smaller excavators are going to use a lot less fuel,” Ware added. “If we compare this to mid- and large-sized excavators and dozers, we might be getting close to a point of equilibrium, when it comes to environmental impact. Those that consume huge amounts of fuel move massive amounts of earth. However, the ability to have the larger units operate much more efficiently, complete jobs much faster, and get on site and off site quicker with fewer passes in fewer hours adds up to a green dividend. Then you take the smaller volumetric scale of so many excavators and the environmental benefit really starts to balance out. There are huge incentives for all these platforms, whether it be dozers or excavators, to have the technology in place.” Hemisphere announced at the Bauma Exhibition in October that it now has systems to support loaders and scrapers.
“One of the things that’s really intriguing to me about the loader solution is that it represents a crossover point between construction earthmoving and agriculture,” Ware said. “There’s a huge benefit for feedlots and agriculture-related operations, where they use machine-controlled loaders to avoid damaging base layers. We have a growing machine-control audience, and a substantially growing precision agriculture audience. It is just one example of how technologies are cross-pollinating in different verticals.”
The benefits of machine control are broadly recognized across the industry. “Improved construction efficiency and shorter construction time means that the machine operating time is shortened for the same workload,” Sun said. “According to our own calculation results, using for instance our system for motor graders, fuel consumption can be reduced by 35% to 50% under different working conditions. Thanks to the full real-time automation of its blade, the grader can achieve the expected finish accuracy in one or two passes, whereas an unequipped machine would require four to five passes. This effectively reduces fuel consumption and, as a result, minimizes the carbon footprint of construction projects.”
Automation means you can build to the model in less time and refine the movements of the equipment to move just the right amount of material — enough to improve productivity, but not so much as to put an undue strain on it. “Any time you have a piece of equipment that needs to be repaired or is out of service, it is disruptive to the project of course, but it can also have an environmental impact, and sustainability is something we all work toward,” Thibblin said.
Connectivity and Collaboration
Going to a fully digital site means working fully in 3D, from a digital model, and seeking to eliminate 2D plans sets. No more interpretation, no more estimation—the right amount of material is moved rapidly and reliably by multiple machines working in harmony. (Photo: Hemisphere GNSS)
Moving forward, there may be additional incremental gains in the productivity of individually automated equipment, yet this may be modest in contrast to the time since the introduction of machine control decades ago. For the next sea change in construction productivity, we should be looking beyond simply the machines. “Let’s take the holistic viewpoint,” Thibblin said. “You have everything from the machines that of course have either machine control or different levels of autonomy, everything from semi-autonomous to semi-automatic. Then you have the trucks, which can be connected also with the tracker devices, which enables optimal routing, enhanced safety, and coordinating material handling cycles.”
Total project and site coordination has been in the works for vertical construction for quite some time; we hear a lot about building information modeling. However, heavy civil is catching up. “We anticipate that the ongoing integration of digital construction solutions with internet of things technologies will bring more choice and functionality to customers,” Sun said.
Further, real-time collaborative software platforms are already in use. Many vendors for machine control have added live connectivity for such coordination.
“Our customers are using ConX,” Thibblin said, referring to Leica ConX, a cloud-based collaboration tool. “It is remotely connecting to the mission, which is support, service, file transfers, project updates.” While online collaborative tools have been around for years, current offerings have reached such a level of maturity that they have driven a boom in adoption for even smaller operations. Customers need to make sure that projects are working optimally, and continuously.
Another major difference from the early days of machine control is that the relative cost of outfitting equipment with automation components is far less. Therefore, it is more practical to automate nearly all equipment on a site, making a truly coordinated digital site possible. “It’s not just the larger businesses that are investing, it’s also the smaller businesses that understand and can calculate the ROI. It is also a difference in competency level: how complex and support-intensive the system was. Now, it’s much more integrated,” Thibblin said.
Today’s systems are tighter, work better, connect better with original equipment manufacturers (OEMs), and the learning curve not as steep. The machines have become smarter, yet easier to use and integrate. “You do not have to be a nuclear scientist to understand the systems,” Thibblin said. “The equipment and collaboration tools are now much simpler. Not simple to make, but we do that for you.”
It is a chain reaction: the equipment gets smarter yet simpler, and both characteristics drive more adoption. More of a site gets automated, enabling digital collaboration, and with that comes more efficiency, saving on time, costs, materials and fuel. The sum of the parts yields productivity gains, the site gets safer, and of course there is a green dividend as well. “It is not just the one thing that gets to this,” Thibblin said. “It is many parts.”
Clark reiterates, “The biggest driver and the biggest impact is when we can actually control the site, optimize how we coordinate groups of machines working together, and efficiently run the job site. That’s where you’re going to see the biggest benefit for sustainability and reducing the carbon footprint. You don’t just optimize productivity at the machine — it’s the coordination of the site and how the machines work together.”
What about the smaller firms and short-duration projects? Should the same level of full site integration happen for each job? Perhaps not. However, there are alternative ways to realize nearly all the benefits of automation without a full digital site. “There’s a lot of focus on short-duration jobs, not only for the typical small contractors, but also for large contractors,” Clark said. “Some large contractors actually target a decent portion of jobs for smaller duration, to balance out changes in market dynamics.” There is a lot of demand for small contractors with technology, and many small contractors have to automate just to stay in the game.
“People using grade control see all the benefits, and that affects their costs,” Clark said. “They can get jobs at a different price than someone who isn’t benefiting from grade control. We’re seeing this a lot in the adoption of our earthworks and grade-control products.”
A challenge to adoption by smaller firms used to be that with a small staff, they might not have the necessary office software, a surveyor, a design engineer, or a 3D modeler. While there is a cottage industry of drafters who do small 3D modeling contracts for that market, there are now more alternatives. “We’ve added features to our systems that enable these contractors, on these short duration jobs, to create designs without requiring office software,” Clark said. “Typically, without a 3D design, you are eyeballing, and you have to do grade checks. There are conventional systems that can include lasers and line tracers, but now that simple designs can be added to the machine-control systems without additional office steps, more operators will be able to use them on a greater number of small jobs.”
Multi-sensor integration has enabled more equipment on the site to be automated. Not long after the first GPS-guided machine control systems came along, more sensors were added, such as inertial measurement units (IMUs). Besides IMUs, the sensors in play can include GNSS receivers, lasers, lidar scanners, sonics, optics, cameras, displacement sensors, pressure sensors, thermal sensors, inclinometers, vehicle distance measurement instruments and telematics.
Beyond GPS, the wealth of additional GNSS satellites and signals has brought more robust and reliable solutions in mixed environments. Recently, a heavy equipment operator called to ask if there was “something wrong with GPS” that day. He reported having spotty fixes and wildly varying results. After some standard troubleshooting of his communications and correction sources, we determined he was using a legacy broadcast format, and his GNSS receiver, while fully multi-constellation enabled, was only using one constellation. Once a newer correction format was chosen — bam! — he was fixed instantly with results as good as he’d ever seen. Things are getting better on all tech fronts.
Coordination of a fully digital site often involves integrating as many operations as possible through a back-end site management software, connecting as much equipment as possible, and working from standard models. This can be a relatively simple proposition if a site is under a single solution. However, general contractors may not be in a position to use equipment from a single brand. They may have a diverse equipment portfolio and seek flexibility in being able to onboard subcontractors. Vendors have recognized this and offer different levels of interoperability. “In addition to high-performance and real-world site-smart software features, our systems play well with mixed fleets,” Noland said. “Meaning multi-brand GNSS systems, radios and various file formats. This is key for firms that have already made investments, as well as new users entering the market concerned about how compatible their equipment will be.”
“If you have a mixed fleet, you can easily grow it,” Ware said. “Or, you can interoperate with other contractors or entities. So, if there’s a brand X already working, and if a Hemisphere GradeMetrix contractor is added to that project, they can seamlessly come in and handle most of the files, go immediately to work, and further expand the use of the technology on that particular project.”
The Underserved Market
Machine control has evolved in the decades since initial productization from navigation and guiance to include precision control of blades, buckets and more, and the ability of even smaller equipment to work from 3D models. (Photo: Trimble)
If the construction industry is going to help meet growing global infrastructure needs, to fill the existing multi-trillion-dollar infrastructure gaps, then a lot more equipment needs to be automated.
“Let me just make a general comment that speaks to both productivity gains and a lower carbon footprint: as an industry, we can do much better,” Noland said. “Only about 15% to 20% of the equipment that could be outfitted for machine control has been, and the other 80% is up for grabs.” Noland credited other key players — such as Trimble, Topcon, and Leica — with providing excellent solutions for certain sectors of machine control, yet he sees an opportunity for Hemisphere to excel.
“The next wave is the underserved part of the market,” Noland said. “If we’re successful, then your climate impact is greater and your productivity gains higher.” He noted that in addition to systems for large equipment, a particular focus for Hemisphere has been providing a range of affordable solutions for smaller equipment. “We feel like we are tapping into that part of the market that has been underserved. It’s not necessarily new features from what everybody already has, as much as it is democratizing the technology to that underserved 80%.”
Autonomy and the Near Future
It is exciting to think about, but is the next sea change for construction machine control going to be full automation? Is that truly an inevitability? Or is the road to autonomy already paved with productivity gold?
“The autonomous machine, and the autonomous site; it is what we are doing to get there that continually boosts productivity,” Clark said. “As more operator assistance is added, the semi-autonomy that many systems already provide means that the operator can concentrate on more aspects of the operation; and this definitely enhances site safety.”
Autonomy might not necessarily reach every piece of equipment, and contractors may not want it for every task. With the prospects of anything like a fully autonomous site being on a sliding horizon, contractors and clients are not waiting around — they are already reaping the benefits of automation on the individual equipment level. Productivity gains and a green dividend will only increase as sites become more fully integrated. In some ways, the best parts of such a future are already here.
Gavin Schrock is a practicing surveyor, technology writer and operator of a cooperative GNSS network.
Rx Networks, Inc., a GNSS data services company, announced the availability of TruePoint.io precise location services on Qualcomm’s Snapdragon 8 Gen 1 and Snapdragon 888 5G Mobile Platforms. TruePoint.io integration empowers Android smartphones to achieve enhanced location accuracy down to a meter or less – something previously only seen with high-grade receivers.
With enhanced location accuracy, superior user experience for such use cases as rideshare, micro-mobility, health and fitness and lane-level requirement applications can now be realized. The enablement of reliable meter-level location accuracy on mobile phones will unlock the potential of location-based services and open the door for other innovative and unique use cases. The limitations of a standalone GNSS chipset no longer become the barrier to pursuing the vision of connected ecosystems reliant on location.
TruePoint.io enables scalable, reliable, and affordable ways to leverage high-precision location on smartphones powered by Snapdragon mobile platforms. Rx Networks’ global coverage, including China, gives smartphone OEMs the advantage of a single GNSS corrections vendor that works across all continents.
“Rx Networks provision of GNSS data services for accurately positioning smartphones using Snapdragon mobile platforms will enable meter-level location accuracy almost everywhere smartphones can connect to a terrestrial cellular network,” said Francesco Grilli, Vice President, Product Management at Qualcomm Technologies, Inc. “Meter-level location accuracy is poised to improve smartphone user experiences and spur the creation of exciting and innovative services for businesses and consumers.”
TruePoint.io is scheduled to be available on Snapdragon mobile platforms initially in China in Q4 2022 and globally in H1 2023.
A roundup of recent products in the GNSS and inertial positioning industry from the October 2022 issue of GPS World magazine.
OEM
Software
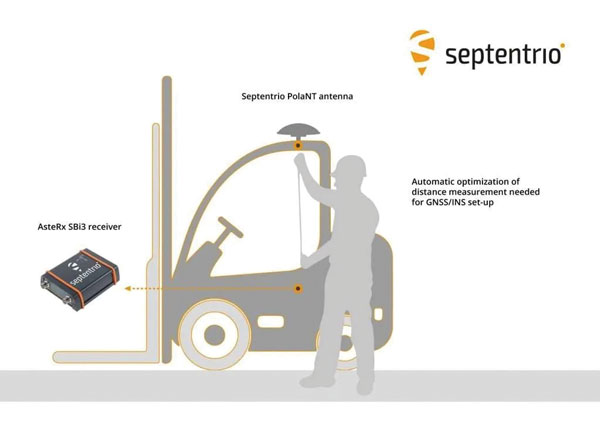
Aids GNSS/INS installation
Photo: Septentrio
The RxLeverArm software tool aids integration of GNSS receivers that include inertial navigation systems (GNSS/INS). RxLeverArm is part of Septentrio’s RxTools software package included with every Septentrio GNSS/INS receiver. The new tool visualizes, validates and automatically calibrates the exact distance between the INS sensor and the antenna, removing the need for accurate distance measurements with complex instruments. For lever-arm compensation, users only need to measure the rough distance between the INS sensor and the main GNSS antenna reference points on the vehicle. Data is then logged under open-sky conditions, which allows the RxLeverArm tool to optimize the initial rough distance measurement and prevent common errors such as sign inversion.
Enables proof of concept for IoT products and applications
Photo: u-blox
The u-blox XPLR-IOT-1 IoT explorer kit is an all-in-one package to test, evaluate and validate applications for the internet of things (IoT). The board hosts an ultra-low-power MAX-M10S positioning module capable of concurrently tracking four GNSS constellations, delivering highly reliable location data. Integrating relevant u-blox technologies and services into a capable prototyping platform with a vast selection of sensors and interfaces as well as cloud connectivity, XPLR-IOT-1 makes it easier to explore the potential of IoT applications.
The LC29H is a dual-band multi-constellation GNSS module built using the Airoha AG3335 platform. It is available in multiple variants and optionally integrates real-time kinematic (RTK) and dead reckoning. The LC29H series offers high performance with power efficiency to meet the market needs of high-precision positioning at the centimeter and decimeter levels. The LC29H concurrently receives and processes signals from GPS, GLONASS, BeiDou, Galileo and QZSS. The modules are suited to an expanding market for autonomous lawn mowers, drones, precision agriculture, micro-mobility scooters and delivery robots.
The Cicerone LoRa/GNSS board is a high-performance, low-power, Arduino MKR-compatible development board based on the u-blox MAX-M10S GNSS module and the MAMWLE LoRa module. It delivers high-performance GNSS, long-range wireless connection, and high-performance processing in a low-power solution for optimal battery life. The board allows users to build tracking applications worldwide with meter-level accuracy and to communicate long-range, low-power data via LoRaWAN. The integrated Li-Po charging circuit enables the Cicerone board to manage battery charging through the USB port. It has a compact 63 mm x 25 mm form factor and is compatible with all Arduino MKR shield boards. These boards all share a common pinout to enable developers to easily add expansions with minimal software changes.
The Snapdragon W5 Gen 1 and W5+ Gen 1 platforms are designed to advance ultra-low power and breakthrough performance for next-generation connected wearables with a focus on extended battery life and premium user experiences. They incorporate innovations including low power islands for GNSS, Wi-Fi and audio; ultra-low power Bluetooth 5.3 architecture; and low power states such as Deep Sleep and Hibernate. New enhancements to the flagship Snapdragon W5+ platform offer 50% lower power, 2x higher performance, 2x richer features, and 30% smaller size, compared to the previous generation. The purpose-built platform is comprised of a 4 nm-based system-on-chip and 22 nm-based highly integrated always-on co-processor. By using these platforms, manufacturers can scale, differentiate and develop products faster in the continuously growing and segmenting wearables industry, Qualcomm said. Qualcomm also announced two reference designs from Compal and Pegatron, which showcase the capabilities of the platform and the company’s collaboration with ecosystem partners, helping customers develop products faster.
The pocket-sized vRTK GNSS real-time-kinematic (RTK) receiver is equipped with dual cameras to enable non-contact image surveying. It also has a nine-axis IMU module with auto installation for tilt surveying. Visual positioning technology combines imagery with high-precision positioning equipment, allowing users to obtain the location of the target from a distance. The Live View Stakeout function improves stakeout speed, while non-contact measurement greatly improves the usable range of GNSS. The vRTK receives 1,408 channels (GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS and SBAS). A new generation of GNSS engine supports the new frequency points B1C, B2a and B2b RTK decoding of BeiDou-3 satellites.
The SXblue SMART features an engine capable of tracking all-in-view GNSS signals, with interference mitigation and optimization for handling a wide frequency band. Weighing 850 g including battery, the SXblue SMART is compact and rugged. Its radio link is based on the Farlink protocol that allows a range of up to 8 km while reserving a wide bandwidth for transmission of real-time kinematic (RTK) data. In addition to a tilt sensor for measurements in hard-to-reach places, the SXblue SMART features a high-performance attitude measurement module that can detect and measure movement of the device. Also integrated are an inertial measurement unit and a thermometer for monitoring and controlling its internal temperature.
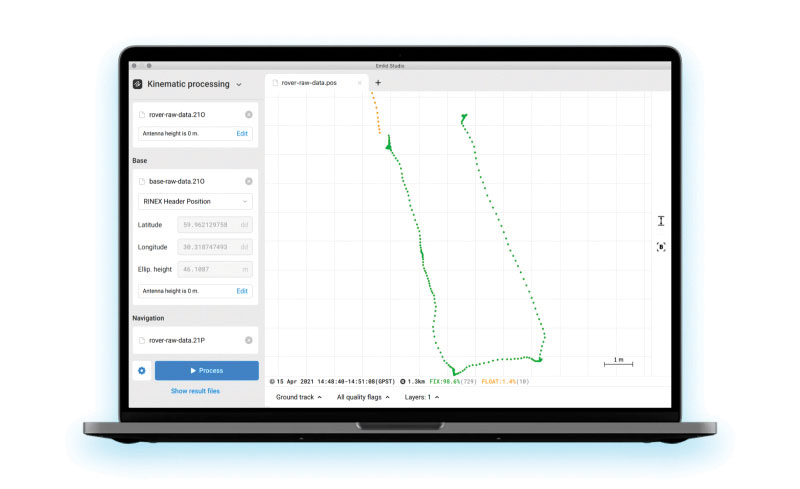
Emlid Studio is a new post-processed kinematic (PPK) application designed specifically for post-processing GNSS data. It allows users to convert raw GNSS logs into RINEX, post-process static and kinematic data, geotag images from drones (including DJI brand), and extract points from survey projects completed with Emlid’s ReachView 3 app. With Emlid Studio, users can post-process data recorded with Emlid Reach receivers and other GNSS receivers or NTRIP services. Post-processing requires RINEX observation and navigation files. Raw data in UBX and RTCM3 format also can be used through conversion.
The P1 GNSS receiver has a high-precision module that tracks GPS, GLONASS, BDS, Galileo, QZSS and SBAS to deliver centimeter-level real-time kinematic (RTK) accuracy even in harsh environments. It is also equipped with an anti-jamming and anti-spoofing algorithm. The P1 GNSS receiver has integrated the GNSS module and GNSS antenna while keeping the device as small as a smartphone, which makes it portable enough to be worn around the neck or placed in a pocket. With 4G/Bluetooth communication, the P1 supports real-time positioning data transmission, providing users with a stable correction data steam and positioning data uploads. The P1 also can be mounted on a pole.
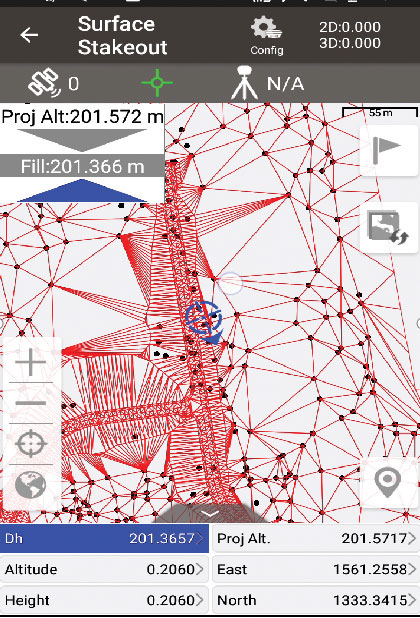
Nuwa surveying smartphone app version 2.3.3.2 has vector map import and digital surface stakeout. The Nuwa app runs on Android and is reliable and easy to operate. It has rich and powerful functions that can help surveyors complete measurements more efficiently and accurately. The app is designed to work with the David and Oscar GNSS receivers from Tersus GNSS, plus other receivers that support NMEA-0183. Features include the ability to configure base, rover and static surveys; graphical interface with background map (online/import); CAD stakeout, road stakeout and earthwork; data management (import/export multiple formats); and Bluetooth and USB connection support.
Version 3.2 of the survey application 1Edit allows the use of Web Maps (WMS) to be used as background layers, making it easier for surveyors to identify assets and changes in context. It provides easier configuration of background maps and supports hybrid working practices for surveyors. Where offline background maps are required, 1Edit supports multiple raster files and handles large image files, providing visual context for geospatial data when there is no data signal. Enhanced support for complex geometries increases efficiency as features with multiple parts share common attributes and IDs.
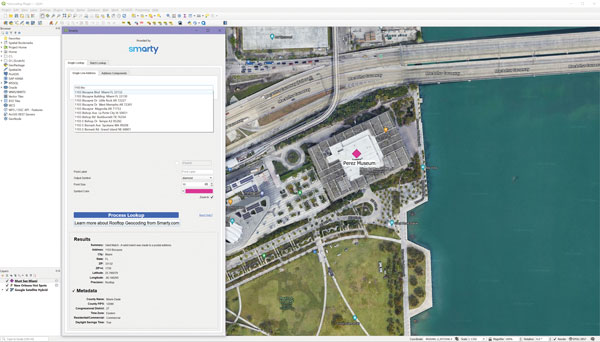
The Smarty U.S. Geocoding QGIS Plugin provides an easy way for users of the software platform to validate, standardize, and convert addresses to their latitude and longitude coordinates (geocodes). The plugin allows manual address entry as well as batch geocoding via CSV. It features a 95% match rate with the actual rooftop and parcel, as well as providing sub-address geocoding that can match secondary addresses such as apartment units and office-suite rooftops in building. The free plugin also includes supplemental metadata useful for many geographic information system (GIS) purposes.
Datasets for the United States, UK, Canada, Australia and Europe
Photo: Maptitude
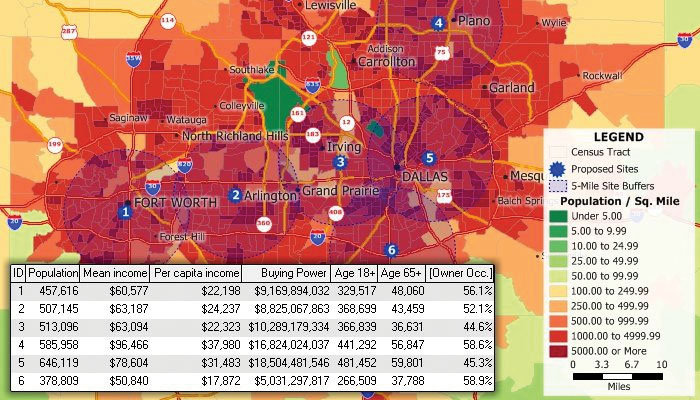
Maptitude 2022 is a major release of the geographic information system (GIS) and mapping software. It includes up-to-date, accurate data encompassing expenditure, geodemographic segments, gross domestic product, medical and banking locations, branded business locations, traffic counts, building footprints, address points and financial assets, as well as the tools to leverage this information to improve the location intelligence of organizations in markets such as healthcare, franchising, communications, logistics, retail, real estate and banking.
The Mesa Pro rugged tablet features 11th-generation Intel Core processors, a Windows 11 operating system, device customization options, a large sunlight-readable display and the “Juniper Rugged” company design. Standard Mesa Pro units come with an 11th Gen Intel Core i5 processor and 16 GB of LPDDR4x RAM. Core i7 and Celeron versions are also available. Each Mesa Pro configuration offers powerful performance and allows users to select the computing performance that fits their needs and budgets.
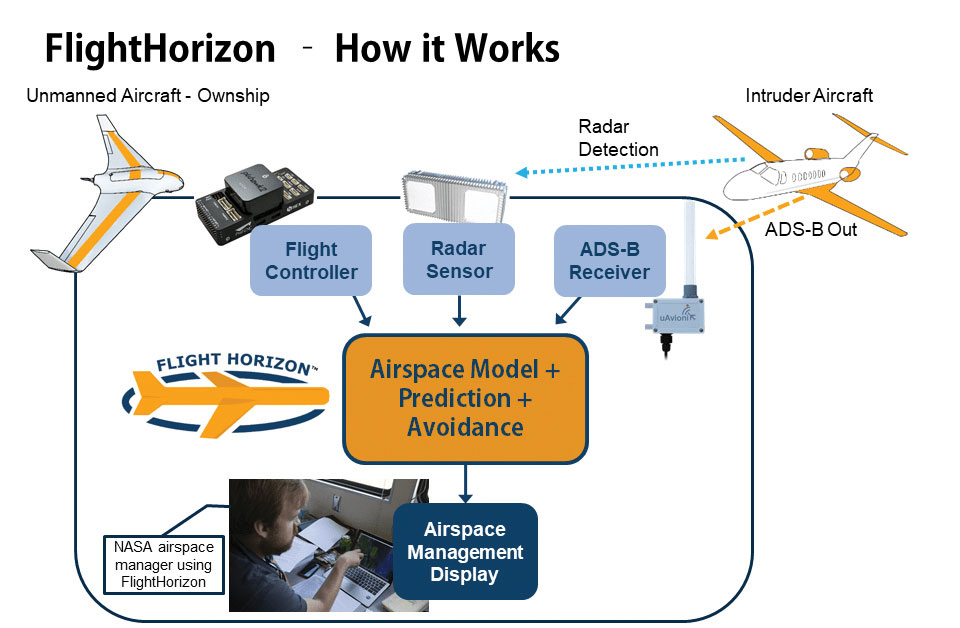
Data fusion across multiple data sources, including ADS-B
Photo: Vigilant Aerospace
FlightHorizon COMMANDER is a situational awareness and safety system for UAV airspace management. The system provides airspace managers with either a 2D or 3D view of all aircraft in the selected airspace using a combination of sensors and data sources to create an airspace safety picture for pilots, airspace managers and command centers. The system is based on an exclusively licensed NASA patent and prototype that has been used in extensive flight testing. FlightHorizon COMMANDER functions as a visualization tool for airspace management, an active situational awareness tool, and a detect-and-avoid system that enables unmanned aircraft to avoid other aircraft and keeps drone pilots and airspace managers aware of the location and air traffic around their UAS and in their airspace.
The Draganfly Heavy Lift Drone is a versatile, multi-rotor unmanned aerial vehicle designed to enhance deliveries and flight times. Compatible with a variety of interchangeable payloads, the heavy-duty drone can carry more and fly longer than the typical professional drone. It has a payload/cargo-lift capacity of 30 kg (67 lbs) and up to 55 minutes of flight time. The industrial UAV handles heavy winds and high elevations with ease. Its lifting capacity permits flexibility in carrying large high-end sensors such as hyperspectral and bathymetric lidar to conduct large-area surveys.
Allows rapid MWIR integration for commercial, industrial and defense applications
Photo: Teledyne FLIR
Part of the Neutrino IS series, the Neutrino LC CZ 15-300 is a new mid-wavelength infrared (MWIR) camera module with integrated continuous zoom lenses. Designed for integrated solutions requiring crisp, long-range MWIR imaging, the camera offers size, weight, power and cost (SWaP+C) benefits to original equipment manufacturers (OEMs) and system integrators for airborne, unmanned, C-UAS, security and targeting applications. The LC CZ 15-300 offers high performance, 640 x 512 high-definition MWIR imagery and 15 mm to 300 mm zoom capability for ruggedized products requiring long life, low power consumption and quiet, low-vibration operation. The camera module and lens are designed for each other, providing optimal performance.
A miniature drone with flapping wings was demonstrated at the Teknofest Black Sea aviation and defense industry event, which took place Aug. 30 to Sept. 4 at the Samsun Çarşamba Airport. With its low detectability, the nano drone is being developed to perform reconnaissance and surveillance missions. It is still in research and development.
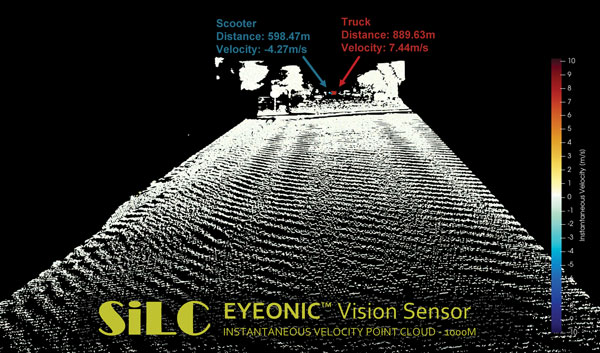
The Eyeonic Vision Sensor can perceive, identify and avoid objects at a range of more than 1 kilometer. The sensor is a frequency modulated continuous wave (FMCW) lidar transceiver that uses a silicon photonic chip. Long-range visibility is a requirement for autonomous vehicles, which require sufficient awareness to evade obstacles at highway speeds. This capability requires vision sensors to provide millimeter-level accuracy and depth at instantaneous velocity. The highly detailed and ultra-long-range information from the Eyeonic Vision Sensor enables robots to classify and predict their environments. The sensor is designed to be integrated into autonomous vehicles, security solutions and industrial robots.
The nROK 1030 is a compact, rugged entry-level vehicle computer with an advanced GNSS receiver. The u-blox NEO-M9N module supports GPS, GLONASS, Galileo, BeiDou and QZSS signals. An Intel Atom x6211E dual-core processor 1.3 GHz/3 GHz (burst) is designed for harsh in-train environments. Its fanless, compact design is suitable for vehicles with limited space. The nROK 1030 has onboard CAN 2.0B for vehicle diagnostics and driver behavior management. WLAN Wi-Fi 6/6E/Wi-Fi 5 and WWAN 5G NR/LTE wireless data connectivity is optional. The nROK 1030 is flexible to meet the demands of various rolling-stock applications, such as wireless gateway, infotainment and digital radio data/voice transmission systems.
GNSS receivers face the same old challenges (extremely weak received signal, orbit and satellite clock errors, ionospheric and tropospheric delays, multipath, dilution of precision, urban canyons, etc.) and new ones (increased interference). However, compared with just a few years ago, they benefit from new signals, many more satellites, a panoply of options for corrections, and improved integration with inertial navigation systems (INS).
For example, pole-tilt compensation is quickly becoming standard. This feature enables users to locate dangerous or hard-to-reach points by measuring them at an angle with just the tip of the pole to which the receiver is attached.
Pole-tilt compensation also makes surveying and mapping easier by removing, in many situations, the need to use total stations or offsets. Together with improvements in work processes, this makes GNSS receivers more user friendly. This is particularly welcome now that more surveyors are retiring than there are new surveyors entering the profession.
The greater accuracy of GNSS receivers enabled by the increase in the number and quality of satellites, signals, corrections services and integration of GNSS with other sensors is also increasing the number of use cases, especially at the high end of the accuracy requirements, such as lane-level vehicle navigation. (Next month’s cover story will center on this year’s Google Smartphone Decimeter Challenge contest, in which competing teams aim to bring smartphone location down to the decimeter or even centimeter resolution using raw location measurements from Android smartphones. This could enable services that require lane-level accuracy, such as estimated time of arrival when using a high-occupancy vehicle lane.)
This month’s cover story highlights what has changed “inside the box” to improve the accuracy and resilience of GNSS receivers for surveying, mapping and a variety of other applications. Read the success stories from five different companies below.
Furuno Electric Co. has released a new generation of time-synchronization GNSS receiver modules compatible with all GNSS systems. The modules deliver nanosecond precision for 5G mobile systems, radio communications systems, smart power grids and grand master clocks.
GNSS receivers for time synchronization are used extensively in critical infrastructure such as mobile base stations and RAN equipment, commercial and defense radio communications, broadcasting, financial trading and smart power grids, where there are increasing needs for robustness, reliability and security.
Furuno is releasing three new products: GT-100, GT-9001 and GT-90. They are designed to suit different applications based on the frequency bands and output signals supported. All models have the world’s highest level of time stability of 4.5 ns (1 sigma).
The GT-100 is the company’s first timing multi-GNSS receiver module supporting concurrent L1 and L5 reception. This mitigates the effects of solar flares, which can lead to time errors, and strengthens measures against GNSS vulnerabilities such as jamming and spoofing.
The GT-100 delivers three outputs including 1 pulse per second (1 PPS) synchronized with UTC as well as user-programmable frequencies. The outputs can be set as required to 10 MHz, 2.048 MHz and 19.2 MHz, commonly used in a variety of wireless communications systems. This drastically reduces the time from development to market launch for these systems, as well as cost savings through reduced component needs. GT-100 is a full-featured highly robust model, supporting dual-frequency band reception (L1 and L5).
GT-9001 supports L1 and delivers high stability 1PPS and programmable clocks on three channels.
GT-90 supports L1 and provides a 1 PPS high stability output.
All models are equipped with the leading Dynamic Satellite Selection (DSS) multipath mitigation technology developed by Nippon Telegraph and Telephone Corporation (NTT) that minimizes degradation of time performance even when the antenna is installed in urban areas or near a window.
Furuno will showcase the new modules at EuMW’s European Microwave Exhibition, a trade and technology exhibition providing access to initiatives in the RF and microwave sector.
Evaluation kits for all three products are available now.
Trimble has released the Trimble TerraFlex Premium edition, a new tier of Trimble’s flagship geographic information system (GIS) data-collection software. The edition provides customers with offline GNSS corrections.
The new automated service works exclusively with Trimble GNSS receivers — including the Trimble DA2 receiver for the Trimble Catalyst positioning service — to provide high-accuracy GIS data capture in a wider range of locations and difficult GNSS environments than was previously possible.
TerraFlex users can increase the quality and speed of their data collection using offline GNSS corrections in situations where real-time services are intermittent or unavailable. Using the new service, all data from the field is automatically processed in the cloud without user intervention.
The most accurate real-time or offline processed position is stored for each feature, unlocking a high-productivity enhancement for all TerraFlex Premium subscribers.
Combining data-collection software and offline GNSS corrections into a single TerraFlex subscription simplifies both the workflow and the purchasing process for GIS organizations, from state and local governments to enterprise customers, including federal governments and utilities companies. This workflow to collect, process and deliver the most accurate and reliable positioning information reduces complicated manual processing steps and helps preserve data integrity.
Photo: Trimble
Streamlined post-processing using TerraFlex offline GNSS corrections is also available to Esri ArcGIS users, with the new Trimble Terra Office add-in for the Esri ArcMap GIS application. The new add-in replaces both the Trimble Positions Desktop and Trimble TerraFlex Desktop add-ins and supports offline GNSS corrections as well as existing desktop post-processing workflows. Terra Office is available as a yearly subscription.
“With Trimble offline GNSS corrections, we’ve taken the manual steps out of post-processing and made it as effortless as possible,” said Gareth Gibson, marketing director, Trimble Mapping and GIS. “This workflow enables TerraFlex customers to expand the locations and environments in which they work while still achieving high-accuracy results, and all without needing to become a GNSS expert.”
The TerraFlex Premium edition subscription is available through Trimble Geospatial Distribution Partners.
The TerraFlex offline GNSS corrections service uses a network of community base stations, and is broadly available in North America, the United Kingdom, Europe, Australia and New Zealand.
The Trimble Terra Office add-in for Esri ArcMap software is available through Trimble Geospatial Distribution Partners.
An interview with Rachel Wong, product manager, surveying and engineering division at CHC Navigation about recent GNSS receiver innovations.
Wong
What was the most significant technical innovation in your GNSS receivers in the past five years?
CHC Navigation is a technology enabler for geospatial professionals in more than 120 countries. End users of geospatial data increasingly come from diverse backgrounds. This forces us to invest heavily in simplifying data-acquisition processes by focusing on the user friendliness and positioning reliability of our GNSS receivers.
The latest technological developments in GNSS real-time kinematic (RTK) rovers are based on the maturity and improvement of satellite navigation systems, as well as on the integration of IMU sensors in the receivers — the latter being certainly the most important innovation.
In addition, the latest generation of our GNSS rovers, such as the CHCNAV i83, is based on the sophisticated iStar algorithm, which significantly improves the efficiency of tracking GNSS satellite signals for unmatched performance in GPS, GLONASS, BeiDou, Galileo and QZSS constellations, using all available frequencies including BeiDou 3. This goes hand-in-hand with the integration of the IMU as it helps to ensure increased GNSS positioning accuracy through optimized satellite geometry.
What has it enabled users to do that they could not do before?
A utility worker uses the tilt-pole-compensation feature to measure a manhole. (Photo: CHC Navigation)
The integration of GNSS+IMU modules allows surveyors to survey points without the need to level the range pole, accelerating the adoption of GNSS technologies for early adopters by simplifying work processes. For example, our i83 GNSS is powered by a 1,408-channel multiband GNSS receiver, the latest iStar technology and a high-end, calibration-free IMU sensor for faster, more reliable GNSS field surveys.
The i83 GNSS’ integrated IMU automatically compensates for pole tilt, increasing surveying, engineering and mapping efficiency by 30% over conventional RTK GNSS surveying methods. In less than 5 seconds, the 200-Hz inertial module is initialized to ensure survey-grade accuracy over a pole-tilt range of up to 30 degrees that meets the real-world operational needs of our users.
What is a good example of this?
Surveyors can extend their working boundaries near trees, walls and buildings without the need for a total station or offset measuring tools. This can be illustrated in sewer and drainage applications, such as measuring the bottom of manholes for water, utilities or sewers, which was barely feasible in terms of GNSS measurement before the advent of hybrid GNSS + IMU positioning.
Operators only need to concentrate on their tasks and no longer need to level their pole vertically. They are now able to perform many measurements without compromising accuracy and reliability. Productivity is greatly increased, RTK usability is greatly improved, and potential human error is reduced, whether you are an engineer, foreman or surveyor, and whether you are an experienced or new user.
Experts at u-blox discuss how they’re creating a hybrid positioning system for automated vehicles using GNSS and terrestrial radio ranging
By David Bartlett, senior principal engineer, Product Center Positioning, and Stefania Sesia, head of Application Marketing, Automotive, u-blox
There’s so much discussion around automated vehicles in the mainstream press these days, that it’s easy to forget some of the critical enabling technology needs to mature significantly before large numbers of people are being whisked from A to B by completely driverless cars.
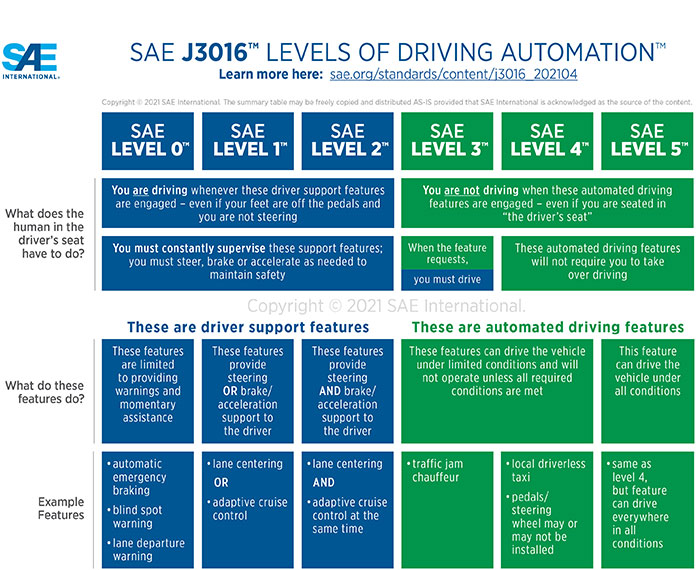
An area demanding particular attention is high-precision positioning. The Society of Automotive Engineers published a six-level automation scale. For vehicles at the higher end of the scale to become reality, they need to be able to reliably pinpoint their location to within centimeters, at all times.
Society of Automotive Engineers’ six-level automation scale. (Image: SAE International)
The positioning systems in most modern cars — which typically use GNSS receivers coupled with an inertial measurement unit (IMU) and the odometer — can’t get close to this level of accuracy. Even in the most favorable conditions for GNSS satellite signal reception, accuracy is between 2 and 5 meters horizontal circular error probable (CEP) without a correction service. In more challenging environments, such as urban areas or indoors, this is significantly reduced.
Using UWB and V2X to complement GNSS
Various solutions are being developed to address this GNSS shortcoming, but all currently have their limitations or don’t offer a solution that’s workable in all environments. Future autonomous vehicles will therefore invariably need to rely on hybrid solutions that blend multiple technologies.
One area where relatively little research has been done to date is in combining GNSS with terrestrial radio signals to enhance automotive positioning accuracy. Cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X, its successor 802.11bd and ultra-wideband (UWB) can all be used for short-range distance measurements. V2X ITS communications technology is listed as a potential positioning solution in EN 302890 (Intelligent Transport Systems), while UWB technology is gaining momentum for indoor applications, as well as by vehicle manufacturers for keyless entry.
These technologies are all ripe for further investigation as complements to GNSS and IMUs, to ultimately support higher levels of vehicle autonomy. U-blox recently ran a study to evaluate the terrestrial-ranging strengths and weaknesses of IEEE 802.11p V2X and UWB as part of a hybrid solution with GNSS for automotive navigation. Our aim was to establish their feasibility for this application, and identify where further research needs to happen for this type of hybrid navigation solution to become part of future autonomous vehicles.
A terrestrial-ranging system requires a network of fixed ground stations (typically referred to as roadside units, or RSUs, in V2X systems) at known locations. V2X or UWB signals sent out by the vehicle are returned by the RSUs, enabling the vehicle to measure the roundtrip time, and consequently calculate the distance between itself and the anchor point. Do this for three or more RSUs that are geometrically dispersed relative to the vehicle, and you can determine its position.
The need to simulate
Mass deployment of the RSUs required for this type of solution has not yet happened. Installing a suitable network of ground stations in an urban setting on public land wasn’t feasible for our research, in part because the regulatory landscape around UWB in this context is still evolving.
Instead, we set up anchor points around various private estates, from open fields to areas representative of urban environments, such as a business park. We took extensive measurements of the UWB and V2X signals’ behavior in these environments, which enabled us to extract performance statistics such as noise, and subsequently create a behavioral simulation model for the ranging performance.
Our test methodology
Having established our behavioral simulation model for different types of environments, rural, urban and indoor settings, we did a number of real-world test drives. These covered a wide range of driving conditions. We took in high-speed sections of open road, dense urban areas, start-stop congested traffic, numerous corners, and places with limited or no GNSS reception such as tunnels.
During these drives, we collected both GNSS measurements and ground truth. For the former, we used a u-blox NEO-M8L module with built-in IMU. To establish the ground truth, we used a high-grade real-time kinematic (RTK) receiver, GNSS augmentation data service and a high-spec IMU.
We classified each section of the test drives based on the environment — dense urban, tunnel, open countryside and so on — to enable us to apply the appropriate noise models in our simulation.
Next, we allocated RSU positions based on chosen density and placement rules, and added 2 m of random height variation, to ensure we avoided a fully planar deployment. We tested with various numbers of RSUs, to help understand how many would be required to achieve the necessary levels of location precision.
We then set additional simulator variables, such as the accuracy of the timestamp on the ranging measurements.
Having done all of this, we generated simulated ranging measurements between the RSUs and the truth position for every ranging epoch. To these, we added noise on a sample-by-sample basis, and merged the resulting noisy simulator measurements with the GNSS measurements we recorded en route.
Key findings
The output of the simulator enabled us to generate performance statistics that facilitated a comparison between the hybrid GNSS + V2X and GNSS + UWB solutions and a conventional GNSS + IMU solution, similar to those found in mainstream vehicles today.
The table below shows performance of the three solutions.
UWB
V2X (IEEE 802.11p)
GNSS+IMU
Ranging update rate
0.67 Hz
(1.5 s interval)
10 Hz (0.1 s interval)
n/a
Horizontal accuracy
0.1 – 2.5 m (Hybrid)
1.1 – 4.2 m (Hybrid)
1.2 – 5.5 m
Height accuracy
0.4 – 5 m (Hybrid)
5 – 10 m (Hybrid)
2 – 7 m
Frequency of operation
6.5 GHz
5.9 GHz
n/a
Signal bandwidth
500 MHz
10 MHz
n/a
Performance of the three navigation solutions on test.
At a very high level, we found that the GNSS+V2X (IEEE 802.11p) system achieved performance similar to a conventional GNSS+IMU(DR) solution using standard positioning. In situations where there is no GNSS reception, or where this is seriously degraded, an IMU also loses its value, given its reliance on continual GNSS reception to remain aligned. Here, a V2X-based positioning solution would be of value for navigation guidance.
However, more work will need to be done, including into the role of the IMU in high-integrity, high-accuracy positioning, to achieve the levels of accuracy and integrity that autonomous applications require.
The GNSS + UWB hybrid system delivered significantly better performance, approaching the levels that can be achieved using an RTK-based GNSS augmentation service. Our test system ran at 0.67 Hz, and was able to deliver precision close to 10 cm, though we would expect future production systems to align with the more common 10-Hz refresh rate broadly used in V2X.
By pairing a 10-Hz UWB ranging system with a high-accuracy GNSS system using correction data, it should be possible to achieve 10 cm-level accuracy in most situations. GNSS with correction data is already proven to be capable of delivering this level of precision in open areas and motorways. A network of RSUs deployed in urban environments would enable UWB to complement high-accuracy GNSS in situations where satellite reception is challenging.
However, the limited range of UWB, coupled with current regulatory restrictions around outdoor use, limit its usefulness at the present time. That said, micro-navigation in indoor areas, such as parking garages, could be a good fit for this technology.
Other lessons learned
The research brought to light a number of other important findings. First, having even just two RSUs visible, in addition to GNSS, provided significant benefit in the hybrid solution.
Second, height variation in the RSUs is essential if the navigation system is to determine the vehicle’s height accurately, particularly with V2X technology. This will be particularly important when it comes to enabling vehicles to safely operate where there are different levels of road one above the other, such as at multi-level junctions.
Third, we were successfully able to build a hybrid filter to process the signals from the V2X, UWB and GNSS systems, and seamlessly handle the transition between areas with GNSS only (where there were no RSUs deployed) and terrestrial ranging only (such as tunnels).
Fourth, despite the promise it showed for this application, terrestrial ranging is far from immune to environmental effects and multipath. Even UWB would sometimes suffer from non-line-of-sight signal propagation.
Finally, accurate time alignment between the GNSS and terrestrial ranging measurements also emerged as a critical factor. Where we had initially anticipated that alignment to within a few milliseconds would be sufficient, in reality we found we needed to be below 100 microseconds.
What next?
This research has shown the potential of using terrestrial-radio ranging to complement the existing positioning technologies and services being deployed in vehicles today. That said, more needs to happen, not least on the regulatory front, for this technology to genuinely become one of the enablers of future autonomous vehicles.
Outdoor UWB use needs to be permitted for this application, for example, and there needs to be widespread deployment of UWB-capable RSUs. Moreover, when RSUs of any kind are being deployed, thought needs to be given to their possible use as positioning anchors, rather than simply as communication devices.
In addition, more spectrum and wider channels need to be allocated to V2X. And we need to see positioning primitives and signals incorporated into the V2X standards. (Positioning primitives allow a car to know in what direction it is headed — up/down/left/right — relative to a point of reference. It uses signals from the sensors to calculate these values.)
A related area that merits further investigation is the use of UWB ranging to protect vulnerable road users such as people walking, wheeling and cycling. With modern smartphones and cars both now including UWB technology, there are opportunities to use this to make autonomous vehicles more aware of the position of people in their surroundings.
If you’d like to find out more about the research, our methodology, or the results, we’d be delighted to discuss these with you. Please email [email protected] to get in touch.