Image objects/themes (“horizon”, “nature”) and landmarks (“savannah”) found by Google Cloud Vision service automatically added as tags.
The Nuxeo Platform is integrating with the Google Cloud Vision API, a new service providing information and insights automatically detected within images. The plugin is now available to download directly from the Nuxeo Marketplace, which offers optional packages to easily add new features to the Nuxeo Platform.
The Nuxeo Platform enables organizations to manage complex digital content at massive scale.
Using the plugin, the Nuxeo Platform exposes a powerful set of configurable image analysis features that can be applied upon file import, within a given workflow/business process, and/or on demand after a specific user action.
Nuxeo also applies Google Cloud Vision to videos using images (video frames) captured by the Nuxeo storyboard, identifying landmarks (“Eiffel Tower”) and objects/themes (“human action”, “mobile device”) saved as tags.
In addition to processing any image attached to content objects, the Nuxeo Platform also applies the capabilities to video, using images extracted from the video storyboard.
Image features detected by the Google Cloud Vision service are available for use with Nuxeo process automation and business logic, and can also be stored as metadata and tags on the content object, including:
Image labeling based on detection of common objects, landmarks, and/or brand logosFaces, if any, detected in the image, including simple sentiment recognition (e.g., “joy,” “sorrow”)
Text found within the image, extracted via OCR
Safe search detection of different types of inappropriate content
Other general image attributes, such as the dominant color
Additionally, the Nuxeo plugin enables developers to specify business logic for customized operations with the Google Cloud Vision service, such as invoking workflows based on the presence of automatically added image metadata.
“The Google Vision team has done exceptional work to develop this fast, reliable and incredibly valuable service,” said Eric Barroca, CEO at Nuxeo. “When the Google Cloud Vision API was placed in public beta last month, we recognized this was game-changing technology for media and digital asset management applications. We immediately went to work integrating this service into the Nuxeo Platform, and we’re proud to be among the first content management vendors to do so.”
Barroca added, “We strongly believe our integration with Google Vision greatly extends the strategic value of the Nuxeo Platform for our customers. By automatically adding a wealth of new, actionable metadata describing content within each image, Nuxeo enables a whole new level of image-based enterprise search, workflows and automation.”
The Nuxeo plugin, named Nuxeo Vision, has been developed to immediately support the Google Cloud Vision service, as well as other image recognition engines in the future.
The Google Cloud Vision API enables developers to understand the content of an image by encapsulating powerful machine learning models in a REST API.
GPS and GNSS have changed the world. Of that there can be no doubt. But in terms of sheer change, both qualitative and quantitative — we ain’t seen nothing yet.
We now witness the creation of an industry. This will be very disruptive. We’ve had change instituted by GNSS; we know what that looks like. We haven’t yet seen a true revolution.This is something entirely new, and there are many things about which we don’t yet have a clue .
What happens to that great American institution, the private car? The relationship between the individual and its four-wheeled extension?
And on the industrial side, do automakers disappear as OEMs — do they become Tier 1 suppliers to Google, Uber and Lyft?
Because of the massive impact of this particular rollout of GNSS-enabled capabilities, I am devoting this issue of the GNSS Design & Test e-newsletter to it, even though it is not in itself a system in space. It is the most radical transformation of life on Earth we have seen, driven by our systems in space.
The following are notes jotted during the Driverless Conference, March 23 in San Francisco.
“In the early 90s, when I was part of a government ride-sharing initiative, we used to talk about these new portable devices bringing data communication into … wherever we go. Now they’re here, and they’re well established. Very soon, this is going to change things, and enable many of the things we’ve only talked and dreamed about so far.” Thus spoke Steve Wollenberg of Automatiks, opening the conference.
“We’re at the confluence of great technological developments. We’re seeing great acceleration of all of them.”
Virtually all the speakers, all these driverless enthusiasts, really love cars. Some own up to collecting them, having multiples in their home garage(s). A bit wistfully, Wollenberg foresaw the new control technology taking over public roadways. “In ten years, racetracks may be the only place where you’re allowed to drive your own vehicle.”
Ride Share. “Four years is the entire lifetime of the ridesharing industry,” said Emily Castor of Lyft, who by virtue of her tenure there for that period, can be termed an industry veteran.
“We’ve seen a full-about turn in the regulatory environment. We see ride-sharing as the stepping stone to a world in which people no longer drive vehicles. Getting an autonomous vehicle on demand through a shared network will be much easier and cheaper than owning a private vehicle.”
Lyft talked with General Motors last year, and found a shared vision of shared use.
Amitai Bin-Nun from Securing America’s Future Energy (SAFE), a non-partisan advocacy organization with business leadership, introduced his organization’s broad mission: reducing U.S. petroleum dependence. Instability in parts of the world is fueled by petroleum dependence.
“This is a hard process. It takes a long time to overturn an established system.” A key obstacle is the lack of compelling new consumer experience, currently. Using connected and autonomous vehicles in a ride-sharing network is an opportunity to get this new experience, and drive the transformative process. Re-order the transportation system.
Mariel Devisa of Travelers Insurance announced that Travelers has launched a ride-share insurance product, live now in 16 states.
In two fairly conservative industries — automotive and insurance — with long-established partners and practices, the efforts to move and change are, frankly, surprising and faster than anticipated, according to moderator Wollenberg. “It’s a fun time.”
Freight and Fleets. Steve Boyd of Peloton made the case that trucking fleets can serve a critical role in pushing the technology forward, because some segments of the transportation industry move faster than others. Getting state approvals without having to go federal is the route pursued now, in terms of full-scale roadtesting of autonomous driving. That will enable early adoption heading into commercial pathways: freight-truck platooning and drafting. Volvo, Intel, Nokia, Denso, UPS and a number of other companies are closely involved.
Boyd announced a set of fleet trials this year, starting in Texas, “a very truck-friendly state.” Legislative approval for trials has passed or is pending in several other states, as many as a dozen. Prospective customers are already lined up in the freight space.
In Europe, an April 6 EU Platooning Challenge will take place in Rotterdam. The Netherlands is leading the EU in the current cycle to approve truck platooning by early 2018.
There’s “a platooning gap” developing between the U.S. and Europe, according to Boyd. Silicon Valley may lead on the technology, but if this is not matched by activity on the regulatory side, it will lose out to other areas that aggressively pursue approvals as well as technology.
Traditionally, the automotive and trucking OEM industries have been very competitive, but now they are seeing the necessity to collaborate to push the policy side forward. This is happening in the insurance industry, too. Competition will certainly still be there, but to enable vehicle-to-vehicle communication a broad measure of collaboration will be necessary.
The road environment today is very imperfect, with many thousands of fatalities and countless more serious injuries. Trucks drive too close together. Highway safety needs innovation and regulatory change in order to improve.
The Long Vision. An autonomous car can’t count on the ability of the driver to retake control of the vehicle in 5 or 10 seconds. So the vehicle needs to be able to take care of itself — fully. Therefore, an evolutionary approach to installing autonomous capabilities may not work.
Some initiatives, however, continue to bring services into the vehicle one by one, gradually. How engaged will the driver be, and in what timeframe? There’s debate, and a shift in thinking may currently be underway.
Traditionally, a 5- to 7-year product cycle in automotive starts when new features are introduced in upmarket vehicles. Examples: adaptive cruise control (to follow the car in front of you at a set distance), lane-keeping assistance. Gradually, these new features are installed in lower price-point models until they become standard throughout the line. With multiple products and product cycles, it will thus take multiple decades. 220 million vehicles are owned by households. An integrative approach to autonomy will take a long, long time.
There is a rising tide for autonomy may take a different approach: autonomy first, that is, full autonomy will take over the vehicle — and as many vehicles as possible.
(Something that no one has mentioned but I can’t help thinking: Given the longstanding and extremely virulent controversy in this country over private gun ownership… What does this bode for something shaping up as a massive social, structural change, not just a new technological wrinkle? What is more American than a gun? A car.
If you thought the Internet, or smartphones, or for heavensakes even GPS/GNSS have radically altered the world — again, we ain’t seen nothin’ yet.)
Attention-grabbing graphic from “Navigating Autonomous Requirements” at ION-ITM.
The talk veered off into rather heady philosophical realms at the plenary session for ION’s International Technial Meeting in late January. Two of the three speakers had been encouraged to go well outside the box — and not to employ any equations in doing so — to address or envision the autonomously navigated future.
We are caught in the act of seeing ourselves become obsolete, at least behind the steering wheel of an automobile. The Google driverless car has logged more than a million miles, exploring the traffice terrain that will soon be home to millions of autonomous vehicles. What has it found? That the human in the loop (HiL) is the biggest source of error and catastrophe.
There remain a few technical issues to sort out before this particular future is upon us. One of these, one that excites John Fischer of Spectracom, is the time-sensitive network concept: a standard and securable network that provides a platform for connecting critical system infrastructure with IT features. These networks deal in velocity accuracies of centimeters per millisecond, The V2V and V2X (vehicle-to-vehicle and vehicle-to-network) systems that will support autonomous driving must reduce latency to nearly imperceptible levels for functions like crash avoidance and lane awareness to work reliably.
We were encouraged to consider the ethics of autonomous navigation by Mikel Miller of the Air Force Research Lab, Sensors Directorate. Once the vehicle becomes autonomous, it decides for the driver — including life or death choices.
Imagine a situation that could actually happen less than a decade from now. Riding in a driverless car on a curving coast highway, you round a curve to see a group of children crossing the road. Detecting them, the car begins to brake, but quickly calculates it cannot stop in time. Programmed to avoid collisions with pedestrians and other vehicles, it is also programmed to protect its passengers. It must choose between carnage on the highway or driving you off the adjacent cliff into the ocean.
Which to choose? Four lives versus one. Other ethical dilemmas have arisen in the history of GPS, GNSS, and precise PNT, chiefly concerning privacy. We are about to enter a more difficult realm.
Wireless LBS Contributing Editor Kevin Dennehy sits in Delorean connected vehicle on “Back to the Future Day” Oct. 21 sponsored by ITS America.
The battle over when autonomous vehicles will be on the road for consumers seems to be divided along government/big auto companies/academic institutions vs. such technology companies as Google, Uber, Tesla and others. Two recent Washington events highlighted the gulf in expectations for full autonomous vehicle rollout. The question is, why are the two groups so far apart? Funding? Safety? Cyber Security?
WASHINGTON — A panel of business and auto experts discussed the quick rollout of autonomous vehicles and the implications on business and consumer mobility at an Oct. 14 National Press Club meeting here. In terms of the time for consumer rollout, Google founders Larry Page and Sergey Brin attended a DARPA autonomous vehicle challenge in 2007 and determined they didn’t want to wait 15-20 years to roll out a business, said Larry Burns, Univ. of Michigan professor and Google consultant.
Burns said that when he was the vice president of research and development at GM, it would have been hard to convince company execs and lawyers to go ahead with full-blown autonomous technology, while such technology companies as Google are forging ahead.
Burns acknowledged the technology has to work as the automobile is a complicated and sophisticated machine. “Google has driven over a million miles. They have engineers and technicians capture any real-time incidents and take them back to a lab to create computer programs. I can tell you the technology is very close,” he said. “I think we need to get a small fleet on the road in one place, because the technology has to be proven on real roads, to see what human drivers have to deal with. We have the tendency to rush to large volumes because we think it is the answer, but we need to learn on a small scale — and share the data between regulators and legislators.”
While Burns concentrated on the usual story — autonomous vehicles will dramatically decrease worldwide highway fatalities — he said that a new automotive DNA will shape a new market that will focus on the rise of electric vehicles and a sharing economy. “There will be more shared vehicles and the opportunity to created tailored vehicles. Average speeds are 25 miles per hour and most trips are less than eight miles,” he said. “It will change our dependency on oil, land use, parking and access.”
With automated technologies, a car will be able to decrease in size to 1,000 pounds, which allows an electric car’s battery to work more efficiently, Burns said.
Although they do not have an autonomous vehicle strategy, one Domino’s Pizza executive said that the technology would be important for their own fleets, but the franchisees would have to see a return on investment to purchase their own fleet.
“We own supply chain centers and drive 22 million miles delivering food to thousands of stores,” said Lynn Liddle, Domino’s executive vice president of communications, investor relations and legislative affairs. “The pizza industry has not been on the forefront of transportation. When we were founded, the goal was to get pizza to a dorm in 30 minutes. We are now into tech — quick ordering and texting through Ford Sync. Our Australian franchisees are using GPS-enabled systems that allow [customers] to know when their pizza is coming.”
Burns said he could see a two-person pod swinging by a Domino’s, hitting the post office and Fedex as part of the same trip. “The challenge of bringing goods to my door that weigh less than a pound in the last mile is formidable,” he said. “This is an exciting opportunity for the trucking industry. We may see this Class A trucks shortage of truck drivers [go away]. There is a great early opportunity for goods movement with a very good payback.”
One panel member from Securing America’s Future Energy, or SAFE, said the organization is establishing an Autonomous Vehicle Task Force, a group of industry experts that will assess the social, political, market and regulatory challenges of the new technology.
“It’s important to not be dependent on one fuel source, which is run by very high-priced cartels and national oil companies,” said Robbie Diamond, SAFE president and CEO. “This is the first time we have seen the convergence of technology and business models, not just the safety concerns. This is a once-in-a-century opportunity to have a better mobility system.”
Not Everyone Believes Autonomous Vehicles Will Be Ubiquitous By 2020…
Delorean connected vehicle at “Back to the Future Day” sponsored by ITS America.
Some transportation industry veterans don’t buy that the autonomous vehicle will have a quick rollout. While autonomous vehicles are great for short trips, they may not be the solution for families who live in rural areas, said Thomas Dingus, Virginia Tech Transportation Research Institute, at a Capitol Hill panel sponsored by ITS America Oct. 21.
“The bestselling car today is a pickup. Why would you want an automated vehicle if you live in the country?” Dingus said. “Some [autonomous vehicle] adoption will be at a lower rate, some not at all. We will still have drivers on the road. There is no doubt that automated vehicles are coming, but it will be slower than people think.”
Dingus’ Virginia Tech entity is part of the Virginia Connected Corridor Project, which tested autonomous vehicles on two interstate highways in the Washington, D.C., area recently.
One panel topic is the need for better highway infrastructure in order for automated systems to work. Case in point was the problems Tesla has been having with its new lane-control feature because it cannot read the on-the-road markings. “Automated vehicle technology doesn’t work when you don’t have good lane markings. People who said the technology is ready today are wrong,” said Hillary Cain, Toyota director of technology and innovation policy. “We really need to make better investment in our infrastructure.”
Cain also said that the industry is far away from achieving National Highway Safety Testing Administration Level 4, or full self-driving automation. “We are much farther away than we think we are,” she said.
Despite a nationwide shortage of drivers, one trucking industry executive on the panel didn’t seem sold on autonomous vehicles. “The [automated] solution has to be 99.9 percent safe. You have to prove you could have done better than with a human being driving,” said Alan Korn, Meritor WABCO director of advanced brake systems integration.
Also at the panel, Sen. Gary Peters, D-Mich., gave his opinions of the Google car and the new Michigan Mobility Transformation Center, and said the new autonomous technologies will be disruptive to whole industries. “The number-one job at risk is drivers. But the most dangerous vehicle on the highway will be driven by humans,” he said. “I had the opportunity to ride in the Google car, it’s a bit freaky.”
In other news:
Driverless, the Business of Autonomous Vehicles, will be held March 22-23, 2016, at the Crowne Plaza Hotel-San Francisco Airport. More than 30 speakers will discuss worldwide autonomous vehicle markets, safety and security, new technologies and other topics. Go to www.driverlessmarket.com for more information.
Google is reorganizing under a new name, Alphabet, separating its moneymaking businesses from its cutting-edge ventures such as the self-driving car and drone delivery service. The move is being made because Google’s penchant for experimentation made traditional investors nervous, according to the New York Times.
Alphabet would be the parent entity, housing several companies, with Google the biggest among them. Alphabet Inc. will replace Google Inc. as the publicly traded entity and all shares of Google will automatically convert into the same number of shares of Alphabet, with all of the same rights. Google will become a wholly-owned subsidiary of Alphabet.
“For Sergey and me this is a very exciting new chapter in the life of Google — the birth of Alphabet,” Larry Page, the chief executive of Google, wrote in a blog post on Monday. “We liked the name Alphabet because it means a collection of letters that represent language, one of humanity’s most important innovations, and is the core of how we index with Google search. We also like that it means alpha‑bet (Alpha is investment return above benchmark), which we strive for!””
“Sergey and I are seriously in the business of starting new things.” Page writes in the blog. “Alphabet will also include our X lab, which incubates new efforts like Wing, our drone delivery effort. We are also stoked about growing our investment arms, Ventures and Capital, as part of this new structure.”
Chris Urmson, Google, speaks at ITS America on the future of the self-driving car.
Plus: Resurgence in indoor location-based marketing, ITS America annual meeting report
Autonomous vehicle technology has made industry-smart people pause and think what the consequences will be if cars and other platforms drive themselves. Will there be a huge increase in traffic when everyone decides to call their cars to grab a loaf of bread at a store? Many of these topics were discussed at the ITS America annual meeting held in Pittsburgh May 31-June 3. In other location news, there seems to be a resurgence in location-based marketing and indoor positioning conferences, leading one to believe that large retailers are finally taking notice.
By Kevin Dennehy
Kevin Dennehy
PITTSBURGH — Chris Urmson, Google’s self-driving cars director, told autonomous vehicle proponents what they wanted to hear during his keynote presentation at the recent Intelligent Transportation Society of America’s annual meeting here. He told them that self-driving vehicles will cut down on the 33,000 U.S. traffic deaths each year (“the equivalent of a 737 falling out of the sky five days a week,” he said) and save time and productivity wasted.
Urmson also said his goal, and his team’s goal, at Google was to ensure son doesn’t have to get a driver’s license, a trend that has become popular with urbanized youth.
The message was upbeat and timely for the crowd of government and university transportation attendees. However, liability issues continue to surround autonomous vehicle development.
“In the end, you are always going to have that guy with the ’57 Chevy in his garage. How do you make the autonomous vehicle work with it? It’s akin to the horse and car,” said Ken Leonard, U.S. Transportation Department ITS Joint Program Office director.
Urmson said he has had “long conversations with insurance companies.” He said that insurance companies are trying to accurately assess risk, and while the model may change, money will still flow, just through a different path.
One ITS America panel discussed security and privacy issues surrounding connected and autonomous vehicles. One panelist said that while privacy may be dead, security is the real big deal with recent reports indicating that cars’ electronics can be compromised.
Others believe it’s going to take more time than Google’s assertion that autonomous vehicles will be on the road in five years. “Lessons from the past temper our optimism. While air bags were patented in 1953, and were introduced on luxury models in the 1970s, it wasn’t until the 1990s before there were big penetrations,” said James Anderson, Rand Corp. senior behavioral scientist. “Key takeaways are automaker opposition about the liability [of new technology] and lack of consumer support.”
The ITS America show floor before the crowds arrive.
Anderson said that yes, the lives saved will be a big driver of autonomous vehicles, but congestion will increase, making way for super commuting. “Public transit will also go through big changes. An economic disruption will occur — do you know how much New York City makes from parking alone?” he said. “Safety doesn’t sell in the early stages, as many benefits don’t go directly to the user.”
Steve Bayless, ITS America vice president of technology, said the solution is not to kill all the lawyers, as there will be continued liability surrounding new in-car technology. “Embedded devices were developed at a time when they were not connected, but the environment has shifted around systems,” he said. “The systems are usually vulnerable because there are poor requirements. Companies have no explicit security policy, or it is poorly specified, or specified too late after design and development.”
Uber Gets Into Autonomous Game
The ITS America’s closing keynote speaker was Uber’s head of global public policy, Corey Owens, who said that one of the best cases for autonomous vehicles was the lack of use by consumers of their cars. “In some areas, owning a car is non-negotiable. But how little these cars are used — as many as 95 percent stand idle,” he said.
Uber announced that Google former head of mapping, Brian McClendon, is joining the company as it develops its own navigation, mapping and transportation systems.
It’s no secret that Uber is targeting continued autonomous vehicle interest, as it created an Advanced Technologies Center in Pittsburgh. It was also rumored that it was a bidder, with Baidu, to buy Nokia’s HERE digital mapping company. (See more on Baidu in Janice Partyka’s June blog.)
One major company trying to find its way into connected vehicles, Xerox, exhibited at ITS America in the show’s Entrepreneurial Village. Xerox has installed its smart parking products in such systems as LA Express Park, ParkyIndy and others.
Xerox has partnered with the University of Michigan Transportation Research Institute in Ann Arbor for testing connected and autonomous vehicles. The company is working with automotive OEMs on electronic tolls, parking, mobile payment and other projects, said David Cummins, Xerox senior vice president and managing director of parking and mobility solutions.
The U.S. Department of Transportation booth at ITS America focused on the connected car.
Cummins moderated a panel where small companies talked about new technologies and applications like cities without bus stops where a bus is continually moving to the riders on demand.
In terms of autonomous vehicle use, Cummins envisions an increase in ride-sharing over the next 5-10 years in urban areas. “Initially, there will be a spike in congestion [from autonomous vehicles]. But ultimately, there will be less car ownership,” he said.
Thoughts on ITS America’s Annual Meeting
ITS America celebrated its 25th annual meeting in Pittsburgh to an enthusiastic crowd of 2,000 attendees and 125 exhibitors. However, I am not sure if this conference has grown at all, despite claims it had the largest attendance last year (co-located with the larger, and more private-company-friendly, ITS World Congress in Detroit).
Despite two decades of rhetoric that it is a private-public partnership, the meeting has the feel of a government and university gathering with a few private companies thrown in who want to do business with them. This is a sad thing, as ITS America has embraced the future of autonomous vehicles with excellent speakers.
Having the meeting in the Bay Area next summer will be a good start to altering the perception that ITS America’s annual meeting is just a government show to “show-the-flag” for private companies.
Mid-Year Report on Indoor Location
Earlier this month, executives attended the Place Conference in New York to get an update on indoor location markets and technology for store chains, large department stores and malls. It was also a chance for technology vendors to show new capabilities that have recently reached the market, said Bruce Krulwich, Grizzly Analytics president, who has authored a report on 150 indoor positioning companies.
Krulwich said, as the year reaches it’s the halfway point, new and more accurate systems are hitting the market. “This includes LED lighting-based systems from Acuity and GE Lighting, and proprietary radio technologies from companies like Quuppa, all of which deliver accuracy of around 10 centimeters with very fast response,” he said. “Some companies, including New York-based Spreo, are improving the quality using standard approaches, like beacons and motion sensing. They are achieving strong accuracy and responsiveness through software improvements. At the same time, hardware-based indoor location technologies, such as Ireland-based DecaWave’s chip and other UWB systems, are coming to market inside highly innovative consumer devices.”
Going forward, the biggest challenge is moving from the lab to the real world, Krulwich said. “Deployments such as Game Stop stores and Taubman malls are great moves in this direction,” he said.
In other location industry news:
Note to meeting organizers: Do your due diligence to ensure conference dates don’t overlap. Having two major transportation conferences on the same week was challenging to attend: ITS America Annual Meeting and Telematics-Detroit.
The brass at Nokia continue to court a consortium of German car makers to buy its HERE navigation business, according to Bloomberg. The consortium, which consists of Audi, BMW and Daimler, is hung up on the price tag of $4.5 billion — and the deadline for bidders has passed, according to the story.
The race for the automated vehicle is on. This time, it’s not about whether automotive OEMs or tech will own the vehicle. It’s a battle between Baidu, China’s web giant, and Google, and it isn’t clear who will win. Baidu has announced it will launch an unmanned car in the second half of this year. Despite speculation that Baidu will be working with BMW, Baidu hasn’t announced its automotive partner. The Baidu vehicle will provide the flexibility of some conventional controls, such as pedals, coupled with automation, unlike Google’s approach of being completely autonomous, without pedals and steering wheel.
One of the most practical uses of artificial intelligence is in the automated vehicle, as cars need to recognize and sort images they “see,” and make quick safety decisions. In a recent TED talk, Chris Urmson of Google revealed a few of the unusual things that Google cars have had to process while driving. The cars have successfully encountered a woman in an electric wheelchair chasing a duck on the road and a child driving a toy car in the road. I wouldn’t be surprised if there are some even weirder encounters that Google is shielding us from.
Artificial intelligence is critical to the automated vehicle. This year Baidu won a prestigious international artificial intelligence competition at Stanford, but was just stripped of its title and barred from competing in 2016. Apparently, the Baidu team broke the rules on how many tests they could run. In the competition, computers had to recognize and sort images and classify objects into 1,000 different categories. The teams were allowed to run a limited number of tests to train their programs on identifying objects. The Baidu team exceeded the limits by submitting their program using different accounts. In an article in the New York Times, Jitendra Malik, an expert in computer vision, compared the actions of the Baidu team to drug use during a sports competition. “If you run a 9.5-second 100-meter sprint, but you are on steroids, then how can your result be trusted?” Malik said.
Automated vehicles aren’t the only location market Baidu is aggressively pursuing. With technology from IndoorAtlas, Baidu has rolled out indoor location to 270 million active users of its map application. The solution uses mobile device technology to create geomagnetic maps of indoor places to enable indoor search and to power store and product search, as well as way-finding. A physical map of a building is uploaded into an app on a mobile device, like a smartphone. Using the app, a person walks all corridors in a building, thereby adding location positioning and creating a map.
Let’s return to the topic of automated vehicles. Earlier this month, Uber suffered a blow when the California Labor Commissioner’s Office ruled that drivers are employees and not contractors, and therefore need to be so compensated. Taxi and limo services had been hurt by services like Uber, and they pressed for redress from what they felt was unfair competition.
Like Uber, the automated vehicle market will likely hit intense push-back from a number of industries that will be disrupted. These include insurers, taxi and truck drivers, and personal injury and traffic litigation attorneys. These groups may try to build regulatory roadblocks for automated vehicles. And as their businesses may suffer, the automated vehicle industry needs to think now about how to mitigate the damage and create allies. With a completely different political process, Baidu may encounter no such resistance in China — quite an advantage. Perhaps Baidu will be first out of the gate, but may not be the long-term winner. Think Ford Sync.
In coordination with Google, Esri is providing replacement software and training to customers and partners using Google’s enterprise geospatial technology.
NT Concepts, an experienced Google integrator, is announcing a new partnership with Esri to help customers that have implemented Google Earth Enterprise and Google Maps Engine make a smooth transition to the ArcGIS platform with minimal interruptions to their operations.
Esri is a longtime provider of geospatial solutions to the defense and intelligence communities and has developed more than 40 specialized applications for their use.
“NT Concepts has mapped the functionality of Google to Esri’s ArcGIS platform. The current users of Google’s enterprise geospatial products will find the Esri platform to be a key option for meeting their geospatial requirements,” said Chris Powell, chief technology officer at NT Concepts.
For Google Earth customers that would like to transition to the ArcGIS platform, Esri is offering the new ArcGIS 10.3.1 for Server and related client/app technology. In addition to other advanced functionality, these will allow users to publish 2D data, 3D buildings, and KML files throughout the enterprise.
“Esri is delighted to have NT Concepts as our trusted partner for this important work,” said Patty Mims, Esri director for intelligence. “The company provides key skills needed to work with both Esri and Google technology.”
The 1-million-mile milestone was for modified Lexus RX 450h SUVs equipped with the self-driving technology, but the car pictured here — built entirely by google — is more fun to look at. (Image: Google)
Google’s self-driving car has driven itself one million miles. Google announced the milestone June 4 on Google Plus. “Our software has now self-driven the equivalent of 75 years of typical U.S. adult driving! Along the way, we’ve navigated more than 200,000 stop signs, 600,000 traffic lights, and seen 180 million vehicles — with several thousand traffic cones, some fluttering plastic shopping bags, and a rogue duck thrown in for good measure.”
In May, Google announced that the car had driven 1.7 million miles, but that number was for both autonomous and manual driving, The one-million-mile milestone the car just reached is for autonomous driving only.
“We’ve come a long way since +Larry Page [Google president and CEO] first challenged us to demonstrate that self-driving technology had long-term potential. Back in 2009, he gave us two audacious goals. The first was to drive 100,000 miles on public roads; in 2009, this was about 10x more miles than had ever been completed by any autonomous driving team. The second was to drive 10 sets of 100 interesting miles — well-known California routes that included crossing the Golden Gate Bridge, navigating the curves of Lombard Street in San Francisco, and traversing the 200+ traffic lights of major boulevard El Camino Real.
“We met those early goals, but it was hard to imagine we’d ever cruise the boulevards of Mountain View, Calif., as smoothly as we do today. We’re taking this million mile milestone as further proof that fully self-driving vehicles will become a reality, and we’re looking forward to finding out where the next million miles will take us.”
Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
By Gilles Boime, Emmanuel Sicsik-Paré and John Fischer
Land-vehicle autonomous navigation requires centimeter-level qualification tools to enable confidence build-up for delivery to open-road traffic insertion. External positioning sensors over a dedicated road section can be replaced with an embedded high-accuracy, highly responsive epoch-by-epoch differential GNSS receiver coupled with an inertial navigation system. The demonstrated absolute accuracy and mobility extends the potential test area and minimizes cost for multi-environment validation.
Cover courtesy of Mercedes.
Personal cars and commercial trucks are continuously improving the driver experience and safety thanks to integration of more significant and machine-assisted control systems. Advanced driver-assistance systems (ADAS) are now integrated in all luxury cars and moving into mainstream products. Technologies covered by ADAS are specific for each car integrator, but increasingly they include now involving more safety features, such as driver assistance and partial delegation to autonomous control for small maneuvers such as lane control. The generation of ADAS systems introduced in early 2015 on high-end models are engaging more intelligence from the control system such as:
Lane departure warning system
Speed assistance and control
Driver assistance and control
Autonomous emergency braking.
It is not only individual drivers who want this technology, but also governments that are getting involved to prevent accidents and minimize the economic impact associated with them. In the European Union, the general safety regulation 2009/661 was the first step to engage member-states to act as a regulator to mandate car safety improvements. The European Transport Safety Council, a non-profit private association, released in March 2015 a position paper titled “Revision of the General Safety Regulation 2009/661.” It promotes the introduction of lifesaving technologies like intelligent speed assistance, autonomous emergency technology including all speed and pedestrian detection, and lane-departure warning systems as the next step of regulation.
Car manufacturers are not far behind. They understand their customers’ expectation of minimized risk and enhanced driving experience. Telematics is also a path to convert a single vehicle into a fully intelligent, connected and entertainment object with an associated high value. So every car manufacturer is willing to be seen as a technology master.
Toyota, for example, plans to integrate collision-prevention technology in all its mainstream and luxury cars by 2017. The ADAS new generation focuses on radar-activated cruise control technology for the collision-prevention system. The control system maintains distance from a vehicle ahead and can stop the car if driver doesn’t react. The next step is to monitor driver attention with sensors like cameras focusing on the driver’s eyes, and the pressure of the hand on the steering wheel.
However, no fully driverless car is expected in the next 10 years. This technology is limited by legal issues and the lack of reliable nationwide mapping data.
Since the technology must be fully proven to prevent any lethal threat on the user and other drivers, most car and truck companies are working actively on qualifying driverless technology today. Nissan began testing driver-assist technology on open-road traffic in Japan in late 2013. It enables highly advanced systems such as lane-keeping, automatic lane change, automatic exit, automatic overtaking of slower or stopped vehicles, automatic deceleration during congestion on freeways, and automatic stopping at red lights. This is a step towards attaining fully automatic driving, targeted for 2020 by Nissan.
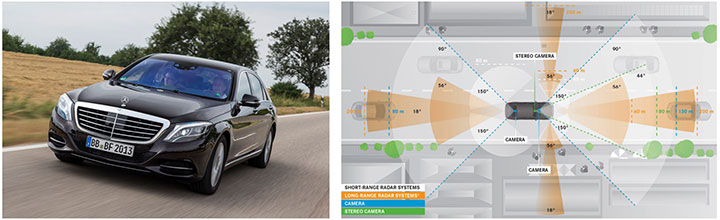
Some European manufacturers such as Daimler Benz are also early adopters. Daimler/Mercedes uses the Bertha Benz prototype car to test autonomous driving technologies. It merged multiple vision, radar and GPS sensor with digital map to monitor an open-road 100-kilometer trip in August 2013 (Figure 1).
Figure 1. Bertha Benz test car, left, running fully autonomous 103-kilometer trip in open road including 27 percent narrow urban roads. Right, networked sensor systems of the S 500 Intelligent Drive research vehicle.
All manufacturers are building driverless capability into their technology demonstration concept cars:
Mercedes with F 015 Luxury presented at the Consumer Electronic Show, early 2015;
Audi with Prologue, an extrapolation of test car RS7 concept equipped with SuperFast driverless pilot;
BMW’s electric i3 car is integrating ActiveAssist technology that enables portions of drive to be without any manual intervention, such as car parking and autonomous rally to a meeting point;
Google’s self-driving vehicle that conforms to California license requirements for driverless tests in open traffic;
Tesla model SD autonomous test car.
Although most market leaders agree that this is not a technology for mainstream production in the next few years, they all work very efficiently to master the technologies. It is a big challenge to integrate all the sensors and the navigation functions to autonomously and accurately position the vehicle on a map. The whole system must be certified to prevent any liability in case of a crash, a case that would engage the solution provider and the vehicle manufacturer.
A large part of the qualification task will benefit from simulations and integration testing platforms in realistic conditions. At the very least, a very robust final open-space validation test must take place. Car manufacturers/integrators are using private test facilities in open air to perform serious trials before proceeding to real traffic conditions. Renault uses a 10-square-kilometer facility in France (Figure 2) to perform private tests in a protected area.
Figure 2. Renault outdoor test center at Aubevoye, France.
New autonomous car drive tests have mandated equipment enabling measurement of the car’s position on the track with an extremely high precision and repeatability. There are two competing technologies to do this:
Install many location sensors on the test track;
Use a general absolute positioning system.
Here we focus on an absolute positioning system that is affordable, easy to install and low maintenance. It is based on two main assertions:
The autonomous pilot can position accurately on the test track;
The test track is accurately referenced to the absolute positioning system.
We focus more closely in this article on the first assertion; the second one can be covered with a specific calibration trial where equipment, as discussed further, can be used in quasi-static mode and experience consistent accuracy. Let us have a deeper look at the candidate position technologies to verify autonomous pilot accuracy.
Positioning Technologies
Many technologies have been proposed to obtain vehicle position on the course. However, they all must be compatible with a reliable mapping database. Given the lack of consistent road infrastructure equipment with alternative capabilities, GNSS positioning is the sole enabling method to fit to a map every place around the world. That is why driverless systems always include a GNSS sensor to help other data matching with the map. The versatility and low cost of GNSS positioning makes it a candidate for open-air validation as well.
Standalone Standard Positioning Service GPS. The SPS single-frequency GPS receivers are included in so many nomadic appliances today that they are a commodity. Since their introduction 20 years ago, their performance is well understood. Some trials were performed in different area profiles with satellite constellation position dilution of precision (PDOP) < 2. Worse results were obtained from deep urban canyons in downtown Seattle, Wash.
For every technology, the relevant performance for the test course is the lateral error to the expected center of the lane in the two horizontal dimensions, referred to as 2D or N/E for orientation north and east.
For standalone SPS GPS, the lateral error standard deviation in 2D can be as high as 46 meters and have peak errors up to 660 meters. Lateral error in 3D can be as high as 20 meters with peak errors up to 175 meters.
Such performances are out of range for any positioning verification. It can only deliver a rough estimate of the point on the map, but would not provide tight correlation with other sensors for the navigation system.
Hybridized IMU and SPS GPS. Coupling of an absolute navigation GPS receiver with an inertial measurement unit (IMU) can mitigate corruption of the navigation solution when intermittent GPS signal outage is encountered. The hybrid approach is beneficial on any difficult signal transmission path from the satellite that is not line-of-sight: in urban canyons, deep foliage, under bridges, tunnels and in any multipath area. It also yields benefits in the very short term (less than a few seconds) for dispersion on the position computed from the sky.
Over the last 10 years, the combined benefits of micro-electro-mechanical sensors (MEMS) and tight coupling algorithms have raised the bar of positioning accuracy. It enables smoothed position along track and dead reckoning (DR) in case of GNSS signal outage.
Lateral error standard deviation in 2D is lowered to 2.3 meters and peak error up to 10 meters. However, this performance is still too poor to validate a vehicle position in the lane.
Hybrid Differential Single Frequency and IMU. The next step to mitigate systematic errors of the GNSS system is to use a set of multiple reference receivers in the vicinity of the area covering the test course. The reference receivers are static. The position of the reference is determined using long-term averages to mitigate constellation errors. A minimum for a position fix of 20 minutes is commonly reported. Then the position error standard deviation in 2D is less than 2 centimeters for baselines shorter than 100 kilometers.
For a MEMS integrated with a standard SPS GPS single-frequency receiver with DGPS correction on a mobile platform moving at less than 70 km/hour with HDOP < 1.4, Table 1 compares performance in a 2013 test.
Hybrid Differential Dual-Frequency Carrier Phase and IMU. The GNSS solution can be further improved, taking into account both L1 and L2 frequencies to mitigate propagation error and carrier phase to achieve ultimate signal accuracy. The combination of both helps solve ambiguities associated with the carrier-phase technique. When combined with a MEMS IMU, accuracy confirmed with HDOP < 1.6 is:
Lateral error standard deviation down to 0.18 meters;
Peak error of 0.6 meter.
However, this is still insufficient accuracy when compared to 0.1 meter required for verification testing.
With such low-cost IMU, GPS outages produce a rapidly increasing lateral error over elapsed time. The lower the speed, the poorer the position result.
Another limitation common to many differential solutions is the turn-on delay for the solution. It is also a repetitive issue in case of disruption of the GNSS solution. It extends the delay to recover from DR situation.
Geodetics’ Epoch-by-Epoch
Geodetics Inc. has developed a new class of instantaneous, real-time precise GPS positioning and navigation algorithms, referred to as Epoch-by-Epoch (EBE) and employing hybridized dual-frequency differential GPS with a high-performance IMU.
Compared to conventional real-time kinematic (RTK), integer-cycle phase ambiguities are independently estimated for each and every observation epoch. Therefore, complications due to cycle slips, receiver loss-of-lock, power and communications outages, and constellation changes are minimized. There is no need for the initialization period (several seconds to several minutes) required by conventional RTK methods.
More importantly, there is no need for re-initialization immediately following loss-of-lock problems such as those that occur when a mobile GPS receiver passes under a bridge or other obstruction, or when it loses satellite visibility during a shaded portion of road. In addition, EBE provides precise positioning estimates over longer reference-receiver-to-user-receiver baselines than conventional RTK.
This feature supports testing for long-range operations, for example, such as positioning a vehicle on a lane. The reference receiver is set in the vicinity of the test center track.
EBE requires the use of a minimum of two receivers, each of which is tracking a common set of five or more satellites and providing simultaneous dual-frequency phase data. Typically, one of the receivers is stationary, but this is not a requirement.
EBE has been proven utilizing dual-frequency receivers and operating at distances of up to 50 kilometers from the nearest base station in unaided mode. Additionally, the EBE algorithms operate in a network environment and make optimal use of all GPS measurement data at each epoch, gracefully degrading the position accuracies when some measurement data are not available. Furthermore, the system will make use of an IMU system, compensating for outages when line-of-sight to the satellites is blocked. This produces a robust and more reliable system.
Epoch-by-Epoch can deliver several benefits including:
Computationally efficient algorithms that provide a position estimate based on a single epoch in several milliseconds. This allows the real-time position estimate to be computed on the user platform (assuming reference station data is sent to the user platform).
An initialization period is not required. Since RTK requires some period of time (that can be measured in seconds to minutes) to perform ambiguity resolution, this is an important capability for platforms that:
require high accuracy (for example, for end-game scoring);
cannot see the satellites until launch;
have short flight or test course duration;
A re-initialization period following loss-of-lock is not required, unlike RTK, which needs to restart the integer-cycle phase ambiguity resolution process. This is another important capability because vehicle monitoring is considering EBE for dynamic applications where loss-of-lock and loss-of-data are likely.
However, it must be mentioned that many of the GPS receivers in use by the test (and training) community today do not support this dual-frequency requirement. Hence, those systems could not realize the maximum benefit.
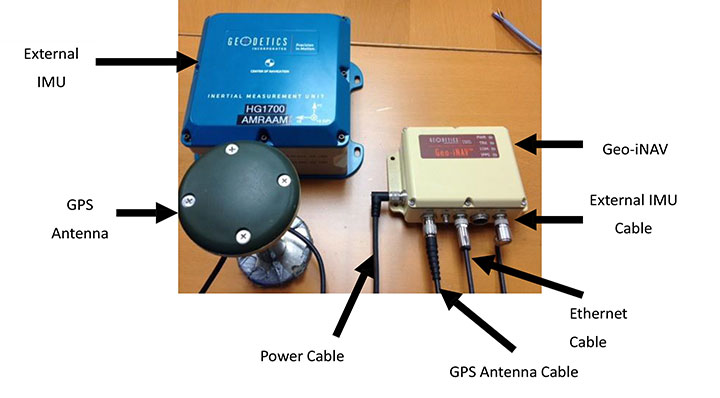
This technology is implemented in a rugged modular platform (Figure 3) with three main units:
A dual-frequency GPS antenna,
An integrated INS coupling GPS receiver with either an internal MEMS IMU or external IMU,
An external fiber-optic gyroscope (FOG) IMU for high-end accuracy and reliability. The external IMU is optional and dedicated to increasing the DR capability.
Figure 3. Dual-frequency differential navigation unit hybridized with external fiber-optic gyro.
Performance. Tests have been performed in conditions close to the land-vehicle navigation validation. It is based on measurements on-the-fly with no post-processing except for evaluation of the error.
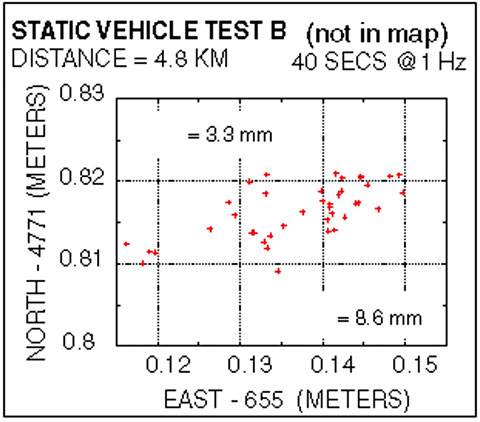
The first case is a static position of the rover 4.8 kilometers away from the reference receiver. Positions are updated once per second. The system includes a FOG IMU. the lateral error peak is less than 4 centimeters. Bias error is less than 1 centimeter. See Figure 4.
Figure 4. Single point error when rover is static.
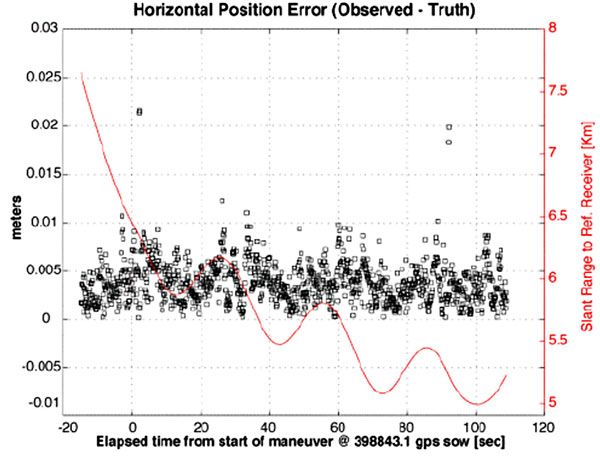
The second test case is with a high-dynamic mobile platform, moving at a speed of 200 km/h, with an average distance from the reference to the rover of 6 kilometers. Lateral error standard deviation is 0.5 centimeters, peak error is less than 2.2 centimeters. Bias error is lower than 0.2 centimeters (Figure 5).
Figure 5. Dynamic trial test single point error.
The performance in these test cases meets the expected accuracy for validation of autonomous navigation.
One last method to increase accuracy is to switch to a different class of IMU performance, from tactical grade to advanced. When in the line-of-sight of the GNSS sky-view, the performance is the nearly the same.
Conclusion
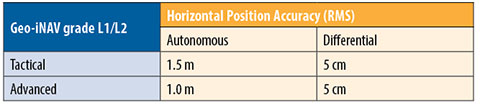
A real-time, differential Epoch-by-Epoch, dual-frequency carrier-phase GPS receiver, tightly hybridized with a high-performance IMU can provide absolute error lower than 5 centimeters in the 10-kilometer baseline range of the reference static receiver. This is fully adapted to the qualification of driverless auto-pilot systems for the targeted year of 2020. It can avoid the need to use complex theodolite and vision calibration systems. It provides maximum flexibility and minimum sustaining costs.
Acknowledgment
This study has been made possible thanks to materials provided by Geodetics Inc. and the advice of Jeffrey A. Fayman, vice president, Business & Product Development, Geodetics Inc. The results displayed in Figures 4 and 5 are from a test with a medium-sized UAV from Allied Drones, model EF44 high-endurance quad.
Manufacturers
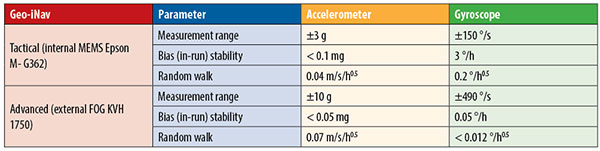
The Geo-iNAV family is a range of GPS-aided INS solutions available in different configurations, including various GPS receivers (L1, L1/L2 RTK, SAASM), internal MEMS or external FOG IMU. As part of this family, the Geo-RelNAV provides differential GPS relative navigation capability, the Geo-hNAV includes a dual GPS antenna receiver for static heading measurement capability, and the Geo-PNT combines position and attitude measurement with precise timing distribution.
Gilles Boime is is chief scientist for Spectracom. He is involved in GNSS signal generator, hybridized navigation platforms, GNSS timing and synchronization innovative solutions build-up. He holds an engineering diploma in telecommunication from Institut Superieur d’Electronique de Paris.
Emmanuel Sicsik-Pare is strategic product manager for Spectracom. He is involved in timing and navigation products and systems definition and application market monitoring. He holds a M.Sc degree from Telecom Bretagne.
John Fischer is CTO of Spectracom. He has more than 30 years experience creating navigation and communications systems, received his master’s in electrical engineering from SUNY at Buffalo. Prior to joining Spectracom, he worked in radar, command and control, and wireless systems.
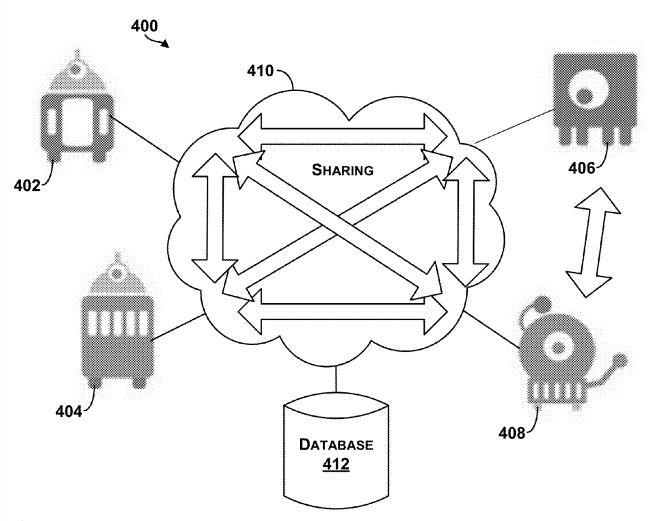
The Google patent shows an example system in which robotic devices interact with the cloud and share information with other cloud computing devices.
In a patent awarded April 14, Google describes “systems and methods for allocating tasks to a plurality of robotic devices,” reports Nextgov.com.
Google’s patent (Patent #9,008,839)outlines methods for connecting a series of robots over the cloud to complete tasks. A robotic device configured to perform a task could make use of a GPS receiver to determine its location. It might also use other sensors, such as a gyroscope or an accelerometer to measure movement. Other sensors could be encoders, infrared sensors, optical sensors, biosensors, Radio Frequency identification (RFID) systems, wireless sensors and compasses.
The patent suggests that the robots could be controlled by a smartphone — from anywhere in the world.
The patent could have value for Google’s self-driving car project, allowing the vehicles to communicate with each other.
In another patent (Patent #US008996429), awarded on March 31, Google describes how a robot’s personality can be defined using sensors and the cloud. According to the patent, “methods and systems for robot and user interaction are provided to generate a personality for the robot.” One aspect includes basing the robot’s personality on identifying the user’s location.
The personality and state may be shared with other robots so as to clone this robot within another device or devices. In this manner, a user may travel to another city, and download within a robot in that city (another “skin”) the personality and state matching the user’s “home location” robot. The robot personality thereby becomes transportable or transferable.
Again, GPS is mentioned as a possible sensor for use either in the user’s smartphone, the robot, or both.
So, in the future, when you leave home, you may be able to take an interactive non-human friend along. Talk about location-based services!
Driverless cars are now traveling Britain’s public roads, according to a report in the Providence Journal. Four prototype self-driving cars took to the country’s highways, launching Britain’s first public trials. Still, with regulatory and legal hurdles, officials said fully driverless cars are unlikely to be used on British roads until 2030.
Four types of autonomous vehicles are being tested, including a shuttle that looks like a larger golf cart and a compact two-seater “pod.” Journalists took rides on the shuttle, which traveled a public square outside central London’s O2 Arena.
The project was “still in the early days,” Transport Minister Claire Perry told the Associated Press, but she added the new technology has the potential to make roads safer and attract global investment.
Driverless cars are also being tested in U.S. cities by companies including Google, and Apple and Sony are at least exploring autonomous vehicles. Meanwhile, automakers such as Audi, Mercedes-Benz and Nissan are developing autonomous cars, and Volvo expects to test its self-driving cars on customers by 2017. The widely discussed goal is to have autonomous vehicles on the market by 202o.