Mark Psiaki received the 2021 Johannes Kepler Award. (Photo: ION)
The Institute of Navigation’s (ION) Satellite Division presented two prestigious awards Sept. 24 at its ION GNSS+ 2021 Conference, which took place in St. Louis, Missouri.
Mark Psiaki received the Johannes Kepler Award for setting a standard of rigor, clarity and thoroughness in addressing key estimation and signal processing problems in positioning, navigation and timing (PNT).
The Johannes Kepler Award recognizes and honors an individual for sustained and significant contributions to the development of satellite navigation. It is the highest honor bestowed by the ION’s Satellite Division.
Psiaki originated the technique of bit-wise parallel RF signal processing for use in general-purpose processors. This enabler of software-defined GNSS led to the first space deployment of a fully software-defined GNSS receiver on a general-purpose digital signal processor (DSP) and to the widespread adoption of software-defined GNSS across the aerospace industry.
Psiaki’s real-time software radio expertise also enabled the development of a spoofer cultivated in his research group. He led the development of spoofing detection algorithms based on cross-correlation of unknown P(Y) codes and based on direction-of-arrival sensing.
Psiaki was the lead signal processing designer/analyst for the iGPS program that combined Iridium L-band downlink signals, GPS signals and inertial navigation system (INS) data to enhance GPS anti-jam capabilities. Recent work on navigation based on low-Earth-orbit (LEO) satellites fuses observables from an existing global communications constellation with INS and other sensor data to provide a backup to GPS.
Another contribution demonstrates how Doppler-based navigation could replace pseudorange-based navigation if implemented using a large LEO constellation.
Psiaki has made many contributions to the practice of modeling, estimation, and detection applied to GNSS, including the study of GNSS carrier phase modeling for space-based applications. His campaign to decode the GIOVA-A L1 BOC(1,1) PRN codes enabled Galileo receiver manufacturers to test their systems before the ESA published the codes. His group’s work on ionospheric scintillations led to the first commercially-available scintillation simulators.
Psiaki holds the Kevin T. Crofton Faculty Chair of Aerospace & Ocean Engineering at Virginia Tech. He studied at Princeton University, completing a B.A. in physics in 1979 (magna cum laude) followed by an M.A. (1984) and a Ph.D. (1987) in mechanical and aerospace engineering.
He is a past recipient of the ION’s Burka Award, its Tycho Brahe Award, and the Pride at Boeing Accomplishment Award. He is a Fellow of both the AIAA and the ION.
PARKINSON AWARD
Lakshay Narula with Brad Parkinson. (Photo: ION)
The Institute of Navigation’s (ION) Satellite Division also presented Lakshay Narula with its Bradford W. Parkinson Award for his thesis, “Towards Secure & Robust PNT for Automated Systems.”
The Bradford W. Parkinson Award is given annually to an outstanding graduate student in the field of GNSS. The award, which honors Parkinson for his leadership in establishing both GPS and the Satellite Division of the ION, includes a personalized plaque and a $2,500 honorarium.
Any ION member who is a graduate student completing a degree program with an emphasis in GNSS technology, applications or policy is eligible for the award.
This is the sixth consecutive year of growth of the journal’s impact factor
The Institute of Navigation announces that its quarterly journal, “NAVIGATION: The Journal of The Institute of Navigation,” has recorded its sixth consecutive year of growth of the publication’s Journal Impact Factor (JIF).
The JIF, an index that calculates the yearly average number of citations to recent articles published in a journal, is considered a bellwether of the relative importance of a journal within its field. A journal with a higher impact factor generally is viewed as being more important than those with a lower impact factor due to its citation rate.
NAVIGATION’s JIF has now increased to 2.1, representing a consecutive seven-year increase.
NAVIGATION’s JIF growth reflects the continued focus and leadership of the Journal’s Editor, Richard B. Langley, who is also the editor of GPS World’s Innovation column. Also key to NAVIGATION’s growth is its editorial board, which includes: Penina Axelrad, Daniele Borio, Michael Braasch, Liang Chen, Pau Closas, James Curran, Naser El-Sheimy, Paul Groves, André Hauschild, Christopher Hegarty, Changdon Kee, Jiyun Lee, Sherman Lo, Gary McGraw, Michael Meurer, Thomas Pany, Boris Pervan, Jason Rife, Andrey Soloviev, Todd Walter, Zheng Yao and Zhen Zhu, and the Journal’s managing editor Lisa Beaty.
NAVIGATION is the leading peer-reviewed scientific journal publishing articles on all areas related to the science and art of positioning, navigation and timing (PNT) and is indexed and abstracted in
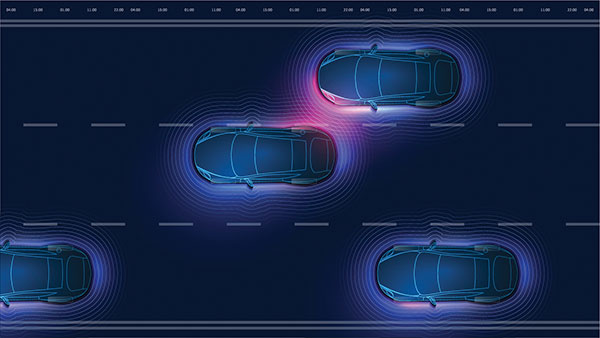
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following four focused on autonomous vehicle positioning for automobiles on city streets. The papers are available at www.ion.org/publications/browse.cfm.
Digital Maps with Tethered Positioning
The authors propose a new method for tight integration of digital map and dead-reckoning (DR) system (inertial measurement unit plus wheel odometer) to provide reliable navigation solutions in challenging GNSS environments for extended periods. Integrated DR and GNSS have been widely used as the backbone of any navigation system for the internet of things (IoT) and vehicle navigation applications. Dollar-level micro-electro-mechanical system (MEMS) inertial measurement units (IMUs) aided by vehicle-wheel odometers have been recently used as low-cost DR systems to bridge GNSS gaps in harsh environments, such as urban canyons, tunnels and under bridges.
However, DR drift errors rapidly increase over time and cannot satisfy most IoT and land-vehicle navigation requirements. Plus, the GNSS receiver may fail to provide accurate position or even experience a complete outage for more than 15 minutes, causing the tethered positioning error to reach several hundred meters. Because land vehicles are supposed to travel on roads, feedback from a digital map can be used to constrain their position.
The authors used a fuzzy-logic map-matching algorithm to identify the correct road segment on which the vehicle moves. A feedback filter senses a correct map-matched position as well as the road segment as measurement updates to the Kalman filter (KF) of the tethered positioning system. The proposed tight integration of digital maps and a DR system is evaluated using datasets collected by Profound Positioning Inc. in Calgary, Alberta, Canada. Results show the proposed method has an average of 0.15% of relative horizontal position error for Calgary datasets — a considerable improvement over the tethered-solution-only with 3.3% of relative horizontal position error. The average azimuth error of the proposed system is 1.3 degrees, while the tethered positioning system shows an average azimuth error of 9.7 degrees.
Citation. Yashar Balazadegan Sarvrood, Haiyu Lan, Aboelmagd Noureldin, Naser El-Sheimy and Profound Positioning Inc., Calgary, Alberta, Canada. “Tight Integration of Digital Map and Tethered Positioning and Navigation Solution for IoT applications and Land Vehicles.”
5G Signals for Opportunistic Navigation
This paper presents a navigation framework in which 5G signals are used for navigation purposes in an opportunistic fashion. A carrier-aided code-based software-defined receiver (SDR) produces navigation observables from received downlink 5G signals. The SDR produces navigation observables from 5G signals and a navigation filter in which the observables are processed to estimate the user equipment’s position and velocity.
An experiment was conducted on a ground vehicle to assess the navigation performance of 5G signals. In the experiment, the vehicle-mounted receiver navigated using 5G signals from two 5G base stations (also known as gNodeBs, or gNBs) for 1.02 km in 100 seconds. The proposed 5G navigation framework demonstrated a position root-mean-squared error of 14.93 m, while listening to signals from only two gNBs.
Citation. Ali A. Abdallah, Kimia Shamaei and Zaher M. Kassas, “Assessing Real 5G Signals for Opportunistic Navigation.”
Using Low-Cost Onboard Sensors
For autonomous vehicles, accurate positioning must be ubiquitous — reliably available at all times and in all places in which the vehicle is expected to operate. While GNSS commonly provides the basis for absolute positioning, it suffers from the problem of availability whenever a direct view of enough satellites is not possible. To address this failure mode, additional complementary sensors can be added to the overall navigation solution through a technique known as sensor fusion. Sensors such as inertial measurement units (IMUs), cameras, lidars, radar and more can be selected in such a way that the individual shortcomings of each sensor are mitigated, and the overall robustness and reliability are improved.
Although current autonomous-vehicle applications employ sensor-fusion techniques, they tend to rely on high-performance sensors to meet the accuracy requirements. These high-performance sensors tend to induce a much higher cost burden than would be acceptable for commercial production, and therefore make mass autonomy too expensive.
This paper focuses on using the lower cost sensors already available on most modern vehicles. These include low-resolution odometry and consumer-grade IMUs currently used for dynamic stability control and wheel-slip detection. A novel approach for combining vehicle speed, steering angles, transmission settings and multiple odometry inputs is presented along with achievable results while operating under a GNSS-denied environment. The test trajectory mimics a typical parking structure with many corners and short, straight segments. The only a priori information required for the filter is the wheel track and wheelbase (separation distance of the wheels).
A 90% performance improvement compared to the stand-alone GNSS/INS solution was observed during GNSS outages of up to 30 minutes. Furthermore, up to a 50% improvement was observed when comparing the multi-odometry to the single-odometry outages during the same 30-minute outage condition. Beyond GNSS outage performance, this paper shows how the use of the extra input to the filter can improve the positioning system’s protection levels to allow for more frequent engagement of the autonomous navigation system.
Citation. Ryan Dixon, Michael Bobye, Brett Kruger and Jonathan Jacox, “GNSS/INS Sensor Fusion with On-Board Vehicle Sensors.”
Radar and INS/GNSS
An autonomous vehicle requires a ubiquitous, accurate, precise and reliable localization system. Many sensors can be used for positioning and navigation, each with its strengths and weaknesses. Inertial measurement units (IMU) are usually used to build inertial navigation systems (INS). INS can be accurate for short durations; however, an INS accumulates errors and loses its accuracy quickly, especially when using low-cost MEMS-based sensors. GNSS can provide an absolute position and velocity to update the INS over time. A barometer provides absolute elevation information, and an odometer provides a speed update.
An integrated navigation solution consisting of an IMU, a GNSS-RTK receiver and odometer can perform well in open-sky areas and on highways. This system can achieve lane-level accuracy most of the time based on the condition of the sensors and the quality of the measurements. However, in downtown and urban environments, the degradation, multipath and blockage of the GNSS signal leads to poor performance for such an integrated navigation system, which is challenged to maintain lane-level positioning.
This paper presents a version of AUTO (formerly known as Coursa Drive), a real-time integrated navigation system that provides an accurate, reliable, high-rate and continuous navigation solution for autonomous vehicles by integrating INS, RTK GNSS, odometer and radar sensors with TomTom’s HD Maps. AUTO performs a tight nonlinear integration of the radar data and maps with the INS/GNSS/odometer system.
Results demonstrate that radar measurements and HD Maps can be tightly integrated with INS/GNSS in an effective manner, such that the integrated system can provide a high-rate, accurate, reliable and robust navigation solution. This is a crucial requirement for realizing a fully autonomous vehicle that can operate in urban environments under a wide range of conditions, including adverse weather and lighting conditions, even in downtown areas with degraded or denied GNSS signals.
Citation. Abdelrahman Ali, Billy Chan, Amr Shebl Ahmed, Medhat Omr, Dylan Krupity, Qingli Wang, Amr Al-Hamad, Jacques Georgy and Christopher Goodall, “Tight Coupling Between Radar and INS/GNSS with AUTO Software for Accurate and Reliable Positioning for Autonomous Vehicles.”
The ION GNSS+ 2021 technical program is online, and registration for the event is now open. ION GNSS+ 2021 takes place Sept. 20-24 at the St. Louis Union Station Hotel in St. Louis, Missouri.
ION GNSS+ 2021: GNSS + Other Sensors in Today’s Marketplace, is the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, and the world’s largest technical meeting and showcase of GNSS and GNSS-related technology, products and services.
“It’s exciting to be meeting in-person in St. Louis,” said Lisa Beaty, ION executive director. “We are expecting a pent-up demand as the community is eager to convene and get caught up. The ION GNSS+ 2021 technical and commercial exhibit is the best opportunity of the year to see what’s been happening in PNT [positioning, navigation and timing].”
ION GNSS+ 2021 features more than 300 technical presentations under two technical tracks: Commercial and Policy, and Research. The opening Plenary Session will feature two keynote addresses: “Towards a Smart Digital Reality: Building a Sustainable Future,” presented by Burkhard Boeckem, and “Artemis: Return to the Moon” presented by Steven Clarke, NASA.
For those unable to attend in person, ION GNSS+ 2021 will include a virtual option. Registration offers access to all on-demand conference content, live streams of select sessions, proceedings, as well as recordings of the sessions that were live streamed during the conference. ION GNSS+ Virtual Registration includes virtual contact with ION GNSS+ exhibitors and CGSIC’s technical program.
To view the ION GNSS+ 2021 technical program and to register, go to ion.org/gnss.
The Institute of Navigation (ION) is hosting a webinar April 20 on “GNSS interference mitigation: A measurement and position domain assessment.”
The webinar takes place at 11 a.m. EDT and is presented by Daniele Borio and Ciro Gioia, authors of a paper on the topic.
Summary
Modern GNSS receivers have to withstand significant levels of interference in order to operate under harsh conditions, such as in the presence of jamming and of other Radio Frequency (RF) threats. A possibility is to implement pre-correlation interference mitigation techniques that operate directly on the samples provided by the receiver front-end. The speakers’ paper provides an assessment of five interference mitigation techniques at the measurement and position level.
The analysis focuses on the adaptive notch filter (ANF) and on four robust interference mitigation (RIM) techniques. Several data collections were performed in the presence of jamming, and the data were used for the analysis that shows that RIM techniques do not introduce biases at both the measurement and position level. While the ANF delays pseudorange measurements, the biases introduced are predominantly common to all the observations with a negligible impact on a single point positioning (SPP) solution.
The webinar will be presented by Gerhard Kruizinga, navigation engineer, Mars 2020 Navigation Team chief, NASA’s Jet Propulsion Laboratory, and moderated by Frank van Diggelen, ION president.
“We are honored to have the Navigation team chief of this historic mission, Gerhard Kruizinga, present his first-hand account of getting NASA’s Mars 2020 Perseverance Rover from the launch pad to a safe landing on Mars,” van Diggelen said.
The precision landing required very high-precision interplanetary navigation and accommodation of entry guidance target requirements, planetary protection requirements and propellant allocation for trajectory correction maneuvers.
The main navigation objective was to predict the trajectory accuracy at atmospheric entry, such that the entry descent and landing system requirements were satisfied for a safe landing. This presentation discusses the planning to meet all navigation requirements and the actual navigation performance during cruise and landing.
The Institute of Navigation (ION) has announced the new members of its Executive Committee, Council and Standing Committee Chairs following its Annual Awards during the ION International Technical Meeting and Precise Time and Time Interval Systems and Applications Meeting, both held virtually Jan. 25-28.
The ION Executive Committee, Council and Standing Committee Chairs will serve a two-year term.
“ION has a distinguished and passionate group of positioning, navigation and timing professionals in key positions to advance the goals of the organization.” said Lisa Beaty, executive director at ION.
The new members include:
ION Executive Committee
• President: Frank van Diggelen, Google
• Executive Vice President: Sherman Lo, Stanford University
• Treasurer: Frank van Graas, Ohio University
• Eastern Region Vice President: Jason Rife, Tufts University
• Western Region Vice President: Tim Murphy, The Boeing Company
• Satellite Division Chair: Patricia Doherty, Boston College
• Military Division Chair: John Langer, The Aerospace Corporation
• Immediate Past President: Y. Jade Morton, University of Colorado at Boulder
Council members
• Eastern Council Member-at-Large: Seebany Datta-Barua, Illinois Institute of Technology
• Eastern Council Member-at Large, Sanjeev Gunawardena, Air Force Institute of Technology
• Western Council Member-at-Large: Paul McBurney, OneNav
• Western Council Member-at-Large: Jihye Park, Oregon State University
Technical representatives
• Fabio Dovis, Politecnico Di Torino, Italy
• Christoph Gunther, German Aerospace Center, Germany
• Allison Kealy, RMIT University, Australia
• Nobuaki Kubo, Tokyo University of Marine Science & Technology, Japan
• Alexander Mitelman, AMM Technical Consulting
• Madeleine Naudeau, Air Force Research Laboratory
• Laura Norman, NovAtel, Canada
Standing Committee Chairs
• Awards Chair: Michael Meurer, German Aerospace Center, Germany
• Bylaws Committee: Deborah Lawrence, Federal Aviation Administration
• Ethics Chair: Heidi Kuusniemi, University of Vaasa & Finnish Geospatial Research Institute, Finland
• Fellow Selection Chair: Terry Moore, United Kingdom
• Finance Chair: Gary McGraw, Collins Aerospace
• Meetings Chair: Jeff Martin, Spirent Federal Systems
• Membership Chair: Okuary Osechas, German Aerospace Center, Germany
• Nominating Chair: Y. Jade Morton, University of Colorado at Boulder
• Publications Chair: Richard B. Langley, University of New Brunswick, Canada
• Technical Committee Chair: Sherman Lo, Stanford University
The Institute of Navigation (ION) presented its Annual Awards during the ION International Technical Meeting and Precise Time and Time Interval Systems and Applications Meeting, both held virtually Jan. 25-28.
The ION Annual Awards Program recognizes individuals making significant contributions or demonstrating outstanding performance relating to the art and science of navigation.
Robert Odolinski received the Per Enge Early Achievement Award for development of multi-GNSS models for precise real-time kinematic positioning and for the sustained dedication to the research community, future surveyors and navigation professionals. The Per Enge Early Achievement Award is presented in recognition of outstanding contributions made early in one’s career.
Capt. Andrew P. Zimmerman received the Superior Achievement Award for validating critical navigation processes and collaborating with Air Force tacticians to provide the highest standards of navigation and protection for the Air Force’s premier electronic attack asset. The Superior Achievement Award is presented to recognize an individual who has demonstrated an outstanding performance as a practicing navigator of any vehicle, in any medium — marine, land, air, undersea and space.
Michael A. Lombardi received the Distinguished PTTI Service Award for system development and leadership in the successful delivery of the U.S. time and frequency standards signals to a variety of domestic and international PTTI users. The Distinguished PTTI Service Award is presented to recognize outstanding contributions related to the management of PTTI systems.
Jennifer E. Donaldson, Joel J. K. Parker, Michael C. Moreau, Dolan E. Highsmith and Philip D. Martzen received the Dr. Samuel M. Burka Award for their paper “Characterization of On-orbit GPS Transmit Antenna Patterns for Space Users.” Their paper was published in the Summer 2020 issue of Navigation, Journal of The Institute of Navigation, Vol 67, No. 2. The Dr. Samuel M. Burka Award recognizes outstanding achievement in the preparation of a paper advancing the art and science of positioning, navigation and timing.
Charles K. Toth received the Captain P. V. H. Weems Award for significant contributions to the development and implementation of multi-sensor integrated navigation systems and for demonstrated excellence as an academic mentor and professional leader. The Captain P. V. H. Weems Award is presented to individuals for continuing contributions to the art and science of navigation.
Karen L. Van Dyke received the Norman P. Hays Award for her significant contributions to civil GPS applications, for her lead role directing the Adjacent Band Compatibility study, and for her commitment to international PNT coordination. The Norman P. Hays Award is given in recognition of outstanding encouragement, inspiration and support contributing to the advancement of navigation.
Mingquan Lu received the Thomas L. Thurlow Award for significant and sustained contributions to the BDS-3 signals design and BDS-3/GNSS interoperable receivers development. The Thomas L. Thurlow Award recognizes outstanding contributions to the science of navigation.
Finally, Y. Jade Morton received the Distinguished Service Award for extraordinary service to The Institute of Navigation. The Distinguished Service Award recognizes extraordinary service to The Institute of Navigation.
The conference will be hosted by the Military Division of the Institute of Navigation for the Department of Defense and Department of Homeland Security. Its theme will be “Enhancing Dominance and Resilience for Warfighting and Homeland Security PNT.”
The FEDCON U.S.-only sessions will take place at the Northern Kentucky Convention Center in Covington, Kentucky, Aug. 24-26; and the U.S.-only secret sessions will be held at the Air Force Institute of Technology, WPAFB in Dayton, Ohio, Aug. 27. The JNC 2021 exhibit hall will be open Aug. 25-26.
This decision to change the date and host the conference in person was made in consideration of the forecasted Spring 2021 global accessibility of the COVID-19 vaccine.
“We have made this decision to ensure our attendees feel safe gathering at ION events,” said Lisa Beaty, executive director at ION. “There appears to be good reason for optimism that our military PNT community will be able to gather again soon.”
According to ION, JNC is the largest U.S. military positioning, navigation and timing (PNT) conference of the year with joint service and government participation. The event focuses on technical advances in PNT with emphasis on joint development, test and support of affordable PNT systems, logistics and integration.
The conference will feature two tracks: commercial and policy, and research. The commercial and policy tracks include high performance and safety critical applications; status and future trends in GNSS; and mass market and commercial applications. The research tracks include multi sensor and autonomous navigation; algorithms and methods; and advanced GNSS technologies.
The conference will also feature a new competition, the High Precision GNSS Positioning on Smartphones Competition. According to ION, participants will use a pool of GNSS datasets collected from smartphones and accompanied with high accuracy ground truth to achieve the best accuracy with the datasets provided. The winner will be based on the accuracy of the results. Team winners will win a cash prize, the opportunity to present their results during ION GNSS+ 2021 and be recognized during the ION GNSS+ Awards Ceremony, ION added.
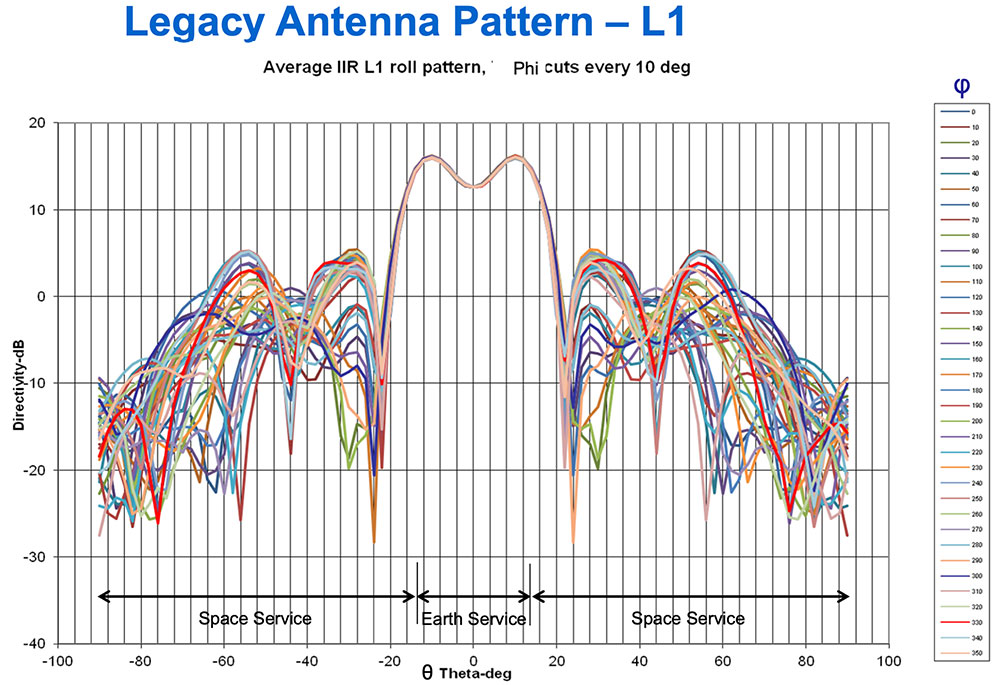
Partnering with the U.S. Coast Guard Navigation Center (NAVCEN), U.S. Space Force and Lockheed Martin Space have released the GPS IIR/IIR-M satellite antenna patterns for worldwide public use.
Additionally, the Institute of Navigation has offered a related ION journal article free to the public to accompany the antenna patterns.
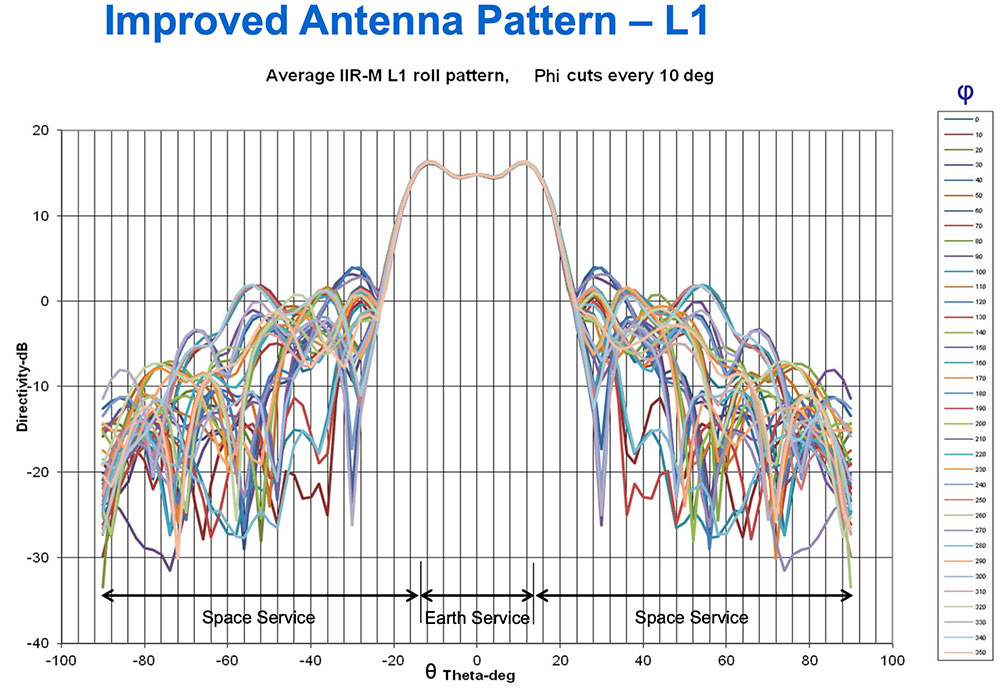
The GPS Block II Replenishment (IIR) space vehicle (SV) began improving upon its baseline design in 2003 with the launch of the first Block IIR SV retrofitted with a redesigned antenna panel. This is the Earth-facing panel providing the GPS L-band broadcast signal. The improved antenna panel includes redesigned L-band elements mounted on the SV Earth-facing structure in the same manner as the original antenna panel.
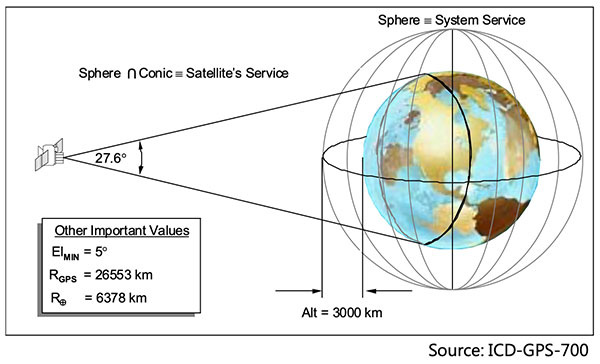
The Earth Terrestrial Service Volume is the near-Earth region up to 3,000 km altitude. (Diagram: NAVCEN/Lockheed Martin)
Spacecraft Navigation
The use of GPS signals for spacecraft navigation has increased in general over the last few decades. Navigation employing GPS observations for spacecraft in low-Earth orbit is now considered routine.
However, the situation is quite different for spacecraft that fly in the Space Service Volume above the GPS constellation, including medium-Earth orbit (MEO), geostationary orbit (GEO) and high-Earth orbit (HEO) satellites, as well as missions to the Moon and beyond.
For these spacecraft, reception of GPS transmit antenna side lobe signals is essential to improve availability and performance of on-board navigation and timing. In this context, the knowledge of the full antenna pattern (main lobe and side lobes) from the transmitting antennas of each of the GPS satellites is essential.
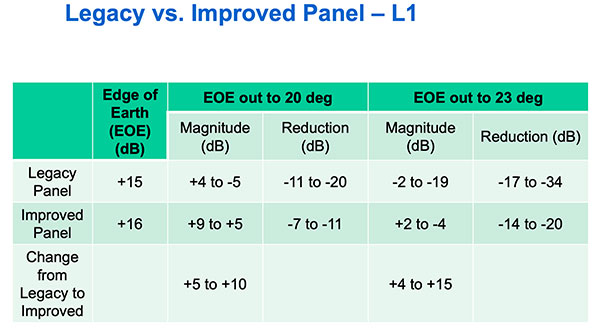
These published antenna patterns and associated ION citation describe both IIR and IIR-M antenna panel versions, their broadcast signal patterns, the performance observed in factory testing, and their on-orbit performance.
Chart: NAVCEN/Lockheed MartinChart: NAVCEN/Lockheed MartinChart: NAVCEN/Lockheed Martin
These patterns represent the current capability of the GPS IIR/IIR-M Space Vehicles. Receiver designers should consult the IS-GPS-200 specifications for use in receiver design and not base design on current signal performance.
GPS technical documents are also available at the NAVCEN website and linked from the GPS.gov website.
Legacy antenna panel on the GPS IIR satellite. (Photo: NAVCEN/Lockheed Martin)
The Institute of Navigation’s (ION) Satellite Division presented several annual awards Sept. 25 during the ION GNSS+ Virtual Conference.
Morton Honored with Kepler Award
Y. Jade Morton received the Johannes Kepler Award for advances in scientific and navigation receiver technology, automated data collection, robust carrier phase tracking, remote sensing, and profound impact as an educator and author.
Morton is the director of the Colorado Center for Astrodynamics Research at the University of Colorado, Boulder ,where she mentors students, faculty, staff and an ever-expanding international network of collaborators throughout the world. She is a prolific author with more than 270 publications. She was awarded her Ph.D. in Electrical Engineering at Pennsylvania State University. She has also authored articles for GPS World.
Receiver Technology Pioneer. Morton has made pioneering contributions to the advancement of GNSS receiver technology and utilization of these enhanced capabilities for scientific discovery. Her work brings together scientific rigor with state-of-the-art engineering innovations to simultaneously improve PNT, while revealing remarkable new applications for GNSS.
Morton’s lab-developed event-driven GNSS data acquisition systems (EDAS), designed to capture severe space weather and ionosphere disturbances of GNSS signals, which could not be handled by existing GNSS monitoring receivers. Her lab designed and built remotely-configurable, multi-GNSS, multi-band, SDR hardware using off-the-shelf components; and developed software including machine-learning algorithms for automatic event detection to trigger raw data recording during these events.
Network established. Her lab deployed these receivers worldwide. The network has enabled unprecedented studies and forecasting of ionosphere/space weather phenomena, detection of satellite oscillator anomalies, and development of advanced GNSS receivers for navigation and remote sensing under challenging conditions.
Morton’s group has made groundbreaking advances in GNSS carrier-phase processing and established theoretical performance bounds. Her group developed optimal carrier tracking loop architectures and implementations, and successfully applied the techniques to processing signals experiencing strong ionospheric scintillation for ionosphere and space weather research; radio-occultation signals traversing moist lower troposphere for weather and climate modeling; weak coherent reflected signals from ocean, land, and sea ice for precision altimetry applications; and navigation in urban canyons and on high dynamic platforms.
Morton is an expert on space weather and ionosphere monitoring. Her research findings range from climatology and morphology of ionospheric plasma irregularities to spatial, temporal and frequency domain characteristics; cause-effect relationships between solar-geomagnetic activities and GNSS signal disturbances; and radio wave propagation theory and simulation. The studies, based on data from her GNSS networks, magnetometers, radar and satellite-based measurements, cover the globe from the arctic to the equator and span an entire solar cycle.
Volunteer service. Morton has served numerous organizations with thousands of hours of volunteer service including organizing each of the ION’s large technical conferences and leading over 10 student teams participating in ION’s autonomous lawn mower and snowplow competitions, is credited as one of the co-organizing founders of the ION’s Pacific PNT conference, has served as the ION Satellite Division Chair and is the current ION President. Dr. Morton is a past recipient of the IEEE Kershner Award and the ION’s Burka and Thurlow Awards. She is a Fellow of the ION, RIN and the IEEE.
The Johannes Kepler Award recognizes and honors an individual for sustained and significant contributions to the development of satellite navigation. It is the highest honor bestowed by the ION’s Satellite Division.
Kimia Shamaei Honored with Parkinson Award
ION’s Satellite Division presented Kimia Shamaei with its Bradford W. Parkinson Award Sept. 25 for her thesis, “Exploiting Cellular Signals for Navigation: 4G to 5G.”
The Bradford W. Parkinson Award is awarded annually to an outstanding graduate student in GNSS. The award, which honors Dr. Parkinson for his leadership in establishing both the U.S. Global Positioning System and the Satellite Division of the ION, includes a personalized plaque and a $2,500 honorarium.
Any ION member who is a graduate student completing a degree program with an emphasis in GNSS technology, applications, or policy is eligible for the award. ION thanks the altruistic experts who served on this year’s selection committee.