The breakdown of limestone cliffs generates landslides and loose debris that threatens the environment, people and wildlife below. These conditions make it impossible to safely operate traditional survey equipment from the ground for landslide detection. Using UAVs for direct georeferencing is an efficient way to take traditional survey efforts to the sky and enables users to accurately assess land formations while mitigating risk.
One way to implement direct georeferencing on UAV platforms is with the Trimble APX-20 UAV, which is a GNSS-inertial OEM solution that increases the mapping efficiency of small UAVs. It consists of small, low power, precision GNSS and inertial hardware components and POSPac UAV post-mission differential GNSS-inertial office software. The APX-20 UAV eliminates the need for ground control points and reduces the sidelap required to be flown per flight.
The APX-20 UAV contains a precision, survey-grade GNSS receiver and dual inertial measurement units (IMU), so it automatically supports integration on gimballed platforms without requiring an external interface to an autopilot or on a mount. It computes at 100 hz using the embedded IMU while simultaneously logging the raw IMU data from both the internal and external IMU at 200 hz for post-processing in POSPac UAV. The postprocessed position and orientation solutions are suitable for direct georeferencing of cameras, lidars and other sensors.
Trimble Applanix UAV Put to the Test
For fast and safe landslide detection, the Trimble Applanix APX-20 UAV for direct georeferencing was put to the test using a Multirotor M600 manufactured by French company L’Avion Jaune equipped with a VX-20 lidar sensor made by YellowScan, also a French company. This combination produces cost-effective and reliable high-resolution UAV lidar-derived DTMs and 3D models for hazard mitigation and planning.
L’Avion Jaune has performed more than 600 successful mapping missions globally. After pursuing mapping activities with mainly crewed aircraft, it began developing UAVs for long-distance applications for marine, tropical forest and polar regions such as the Multirotor M600/YellowScan VX-20, which offers high-precision, cost-effective and efficient aerial mapping.
The APX-20 UAV and the M600/YellowScan VX-20 were combined and deployed to evaluate landslide activities in France. The mission parameters for this configuration included: high point density; x, y, z precision of 5 cm; access to dangerous zones; map generation under dense vegetation area, and fast deployment. The goal of this project was to enable the implementation of safety and prevention plans for the protection of pedestrians, infrastructure, wildlife and more.
During the six-hour duration of the project, the APX-20 UAV and M600/YellowScan VX-20 configuration was flown four times for 15 minutes each during sunrise. It flew more than 75 ha in surface area with a flight speed of 5 m/s at 60 m in the air, following the topography. Checkpoints were surveyed with differential GPS following the conclusion of the flights. Data processing included computation of the georeferenced trajectory, matching flight lines and point cloud classification, which took two days.
The Results
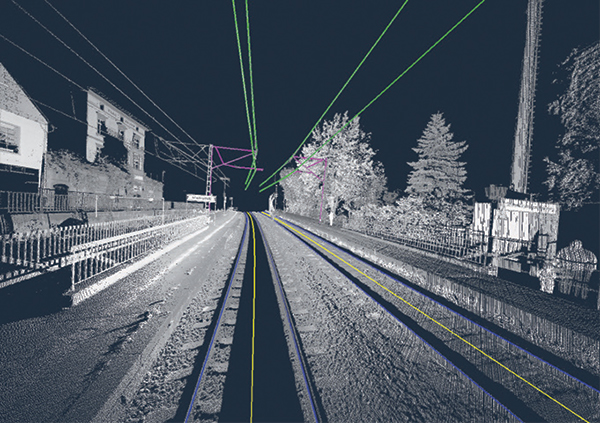
The flexible UAV deployment of resources enabled the acquisition of dense point clouds and the generation of DTM in less than three days. During this project L’Avion Jaune was able to optimize the choice of material and discover the best practices to collect and process lidar data for mapping in dense vegetation.