NovAtel’s Peter Soar shares on the company’s GAJT (“Gadget”), a single unit GPS anti-jam antenna for use in UAVs (unmanned aerial vehicles). GAJT nullifies jammers, ensuring satellite signals necessary to compute position and time are always available.
GAJT may integrate into unmanned vehicle platforms or can be retrofitted with GPS receivers and vehicle navigation systems on military fleets.
High-Precision GNSS Needs Help for Continuous Localization Reliability
By Siamak Akhlaghi
Automotive safety and comfort functions, known as Advanced Driver Assistance Systems (ADAS), have become an essential part of modern vehicles. These functions assist drivers in the driving process, providing capabilities such as adaptive cruise control or highway driving mode. To achieve a desired level of performance, the position of the vehicle must be known. Precise positioning supports the vehicle’s systems with planning, executing and monitoring of a particular maneuver.
Position determination, or localization, is the estimation of the location, heading, velocity and acceleration of a vehicle with respect to a fixed coordinate system. High-precision GNSS provides an excellent, worldwide, absolute position reference for localization. However, GNSS technology alone has limitations that must be overcome to make it suitable for use in autonomous systems. For instance, GNSS signals may become blocked or lost due to: obstructions such as in urban canyon or tunnels; multipath, where signals are reflected off the vehicle body; or signal interference from other RF signal sources.
Siamak Akhlaghi
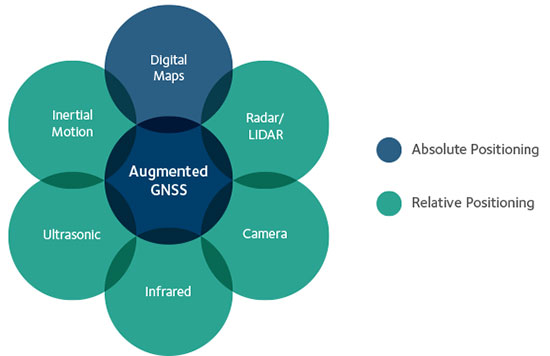
GNSS correction data and data from other sensors on the vehicle can be used to improve the accuracy and reliability of the vehicle localization solution both globally and with respect to the local environment. To achieve the localization performance, accuracy and integrity required for autonomous vehicles, a multi-system, sensor fusion approach seems to be the most promising. Localization systems will require absolute positioning references like precision GNSS as well as local or relative positioning inputs from inertial sensors, odometers, radar, LiDAR, cameras, infrared and ultrasound sensors. It is clear that no single technology will make highly automated driving possible. Rather, the fusion of the entire vehicle’s sensing technologies will provide the localization accuracy and reliability required.
Achieving Accuracy and Reliability with GNSS
GNSS has revolutionized localization in many applications, from precision survey to agricultural guidance. For autonomous driving applications, localization accuracy of 30 centimeters (cm) or less is required. The single-frequency, auto-grade GNSS receivers that have been used in vehicles up to now cannot achieve this level of accuracy. Multi-frequency GNSS receivers utilizing Precise Point Positioning (PPP) correction techniques can achieve accuracies better than 10 cm. PPP algorithms combine GNSS satellite clock and orbit correction data from a global reference station network with high precision GNSS receiver satellite observations to yield robust sub-decimeter positioning without the need for local base stations. Since the PPP corrections can be delivered via satellite, the solution is ideal for highly automated driving where communications infrastructure is costly and in some areas may not be available. Recent advances in PPP techniques provide robust positioning and the ability to quickly regain full accuracy following a temporary loss of GNSS signals, for instance under foliage or highway overpasses.
Figure 1. High-precision / localization with sensor fusion.
Sensor Fusion
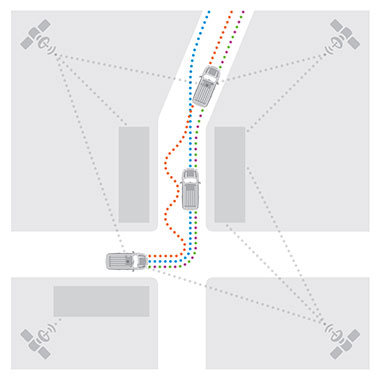
Occasional instantaneous irregularities and temporary outages of GNSS can be compensated for by incorporating measurements of the vehicle motion from inertial sensors mounted in the vehicle. An advantage of a tightly coupled GNSS-inertial solution is that the low frequency errors inherent to inertial sensors can be compensated for and removed from the solution. As a result, sensor fusion algorithms provide a highly robust and stable localization solution at data rates as high as 200 Hz. Other sensors in the vehicle, such as odometers, cameras or LiDAR, can also give information about the relative motion of the vehicle and can add to the redundancy, reliability and stability of the localization solution.
Figure 2. With a tightly coupled GNSS-inertial solution, low-frequency errors can be removed from the localization solution. The brown dots are the GNSS solution, the blue dots are the inertial solution, and the combined colors represent the tightly coupled solution.
High-Precision GNSS Antenna
Antennas play a critical role in achieving precise localization with GNSS. While GNSS antenna requirements differ depending on the application, ideally the antenna should receive only signals above the horizon, have a known and stable phase center that is co-located with the geometrical center of the antenna, and have perfect circular polarization characteristics to maximize the reception of the incoming signals. Highly automated driving applications demand high performance as well as compact size and strong interference rejection. Achieving the required performance amidst these challenging constraints will require innovative new GNSS antenna designs.
Autonomous driving will be a reality in the not-too-distant future. Innovation in the suite of sensors and fusion algorithms used for solving the localization challenge will be paramount to making safe and reliable autonomous vehicles. Further, innovation developed for automotive autonomy will support new autonomous vehicle applications in other segments.
High-precision antennas are key.
Siamak Akhlaghi is segment manager for Autonomous Systems at NovAtel. He has 20 years of professional experience working for high-tech sectors with broad experience in inertial sensors and navigation systems.
NovAtel Inc. has launched the GPS-704-WB wideband antenna, which supports L-band and the frequencies of all current GNSS constellations (GPS, GLONASS, Galileo and BeiDou), including B3 and E6 signals. Customers can use the antenna for GPS-only or multi-constellation applications, giving application developers flexibility, NovAtel said.
The phase center offset of the antenna remains constant as the azimuth and elevation angle of the satellites change, making it a good choice for baselines of any length. Installation is easy, NovAtel said. because the antenna shares the same form factor as other NovAtel GPS-700 series antennas. It is enclosed in a durable, waterproof housing. Its compact, lightweight size makes it suitable for a wide variety of environments and applications, the company said.
NovAtel’s SMART6-L attaches to the Relay RTK radio module to create a single unit for easy system integration.
NovAtel Inc. has launched the Relay RTK radio module, a docking station that provides radio connectivity for its SMART6-L L-band capable GNSS receiver.
The Relay RTK module combined with NovAtel’s SMART6-L receiver creates a compact, easy to integrate positioning solution, NovAtel said. It is available in four radio versions: 400 MHz UHF licensed band; 900 MHz UHF unlicensed band; HSPA (3G) cellular; and CDMA (1xRTT/EV-DO) cellular. The CDMA version is approved for use on the Verizon cellular network.
The 400 MHz and 900 MHz versions support both base and rover configurations. The base station is configured via the integrated web-server/Wi-Fi access point using the web browser on any compatible personal computer, tablet or smartphone. The cellular radio versions support the reception of NTRIP and RTK corrections over the cellular network.
SMART6-L customers can connect to the Relay using their existing SMART6-L interface cables. Relay has support for both screw and magnetic mounting; optional mounting plates are available for roof and pole mounting. NovAtel’s SMART6-L with Relay provides the same level of performance as a standalone SMART6-L unit with the added convenience of radio connectivity to support RTK and NTRIP corrections.
The GPS World Galileo Product Showcase, from the April 2015 issue, features the latest products from seven top companies.
GPS/GLONASS/Galileo Receiver
Septentrio AsteRx3 Photo: Septentrio
The AsteRx3 is a multi-frequency GPS/GLONASS/Galileo receiver is designed for demanding industrial applications. AsteRx3 features simultaneous high-quality GPS, GLONASS and Galileo tracking and a range of innovative features, such as the patented Galileo AltBOC tracking, the advanced multipath mitigation algorithm APME, LOCK+ tracking for exceptional tracking stability under high vibration conditions, RTK+ for extended RTK baselines and faster initialization, and AIM+, Septentrio’s Advanced Interference Mitigation technology, offering centimeter-level measurement quality for high-precision positioning, even in challenging environments.
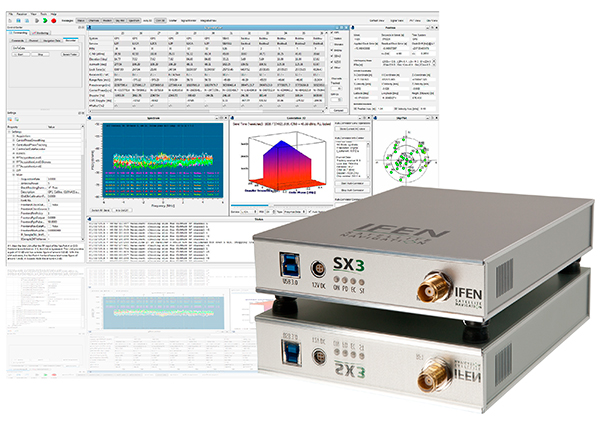
The IFEN SX3 multi-GNSS software receiver Photo: IFEN
IFEN’s SX3 multi-GNSS software receiver tracks all known GNSS signals in view, including Galileo signals, in real time on a standard laptop now and in the foreseeable future (up to 1,000 channels in parallel on a core i7). The included RF front end offers four RF frequency paths with 50-MHz bandwidth each, covering the entire GNSS L-band spectrum. The USB 3.0 interface enables high-speed data transfer with up to 8-bit quantization. An optional dual RF input front end can be used for attitude determination, reflectometry and other applications requiring the synchronized input from two antennas. An optional built-in shock and vibration robust OCXO reference oscillator (MIL-STD 202G) is available, which replaces the standard high-quality TCXO normally used.
The SX3 software lets users configure the data processing, including changing loop bandwidths, integration times and the main processing rate, and choosing between different correlation types. The software includes a multi-correlator providing a two-dimensional (code and Doppler) correlation function visualization in real-time. The receiver comes with several powerful processing algorithms like vector tracking, to improve the tracking of weak signals in degraded environments.
The NEO-M8L Automotive Dead Reckoning (ADR) module by u-blox has integrated motion, direction and elevation sensors. The module integrates gyro and accelerometer with u blox’ GNSS platform M8 to achieve high indoor/outdoor positioning performance for road vehicle and high-accuracy navigation applications.
The module is able to track all visible GNSS satellites including GPS, GLONASS, BeiDou, QZSS and all SBAS, with Galileo to be supported in a future firmware version. Concurrent reception of two GNSS systems is supported. The NEO-M8L module can output a position up to 20 times per second.
In addition to accessing the integrated module’s gyro and accelerometer data, accident reconstruction systems can provide the location of an accident to facilitate insurance claims even if a collision occurs in a tunnel or park house. High-end navigation devices are able to guide drivers through tunnels of several kilometers because of the accuracy of u-blox’ ADR system. Stolen vehicles can be located instantly due to continuous monitoring of sensor data and storage of location in non-volatile memory.
The NovAtel FlexPak6D enclosed GNSS receiver is a flexible dual-antenna solution for application developers seeking a high-precision heading-capable positioning engine for space-constrained applications.
Designed for efficient and rapid integration, the compact receiver tracks Galileo as well as GPS, GLONASS and BeiDou. Antenna placement is flexible: the antenna baseline can be set according to space available on a vehicle and heading accuracy required. The modular OEM6 firmware enables users to configure the receiver for unique application needs. Scalable for sub-meter to centimeter-level positioning, the FlexPak6D delivers NovAtel’s ALIGN precision heading and relative heading firmware, as well as its GLIDE firmware for smooth decimeter-level pass-to-pass accuracy and RAIM for increased GNSS pseudorange integrity.
The GNSS simulator in the vector signal generator R&S SMBV100A Photo: R&S
The GNSS simulator in the vector signal generator R&S SMBV100A is designed for development, verification and production of GNSS chipsets, modules and receivers. The simulator supports all possible scenarios, from simple setups with individual, static satellites up to flexible scenarios generated in real time with up to 24 dynamic Galileo, GPS, GLONASS, BeiDou and QZSS satellites. The simulator also supports Assisted GNSS (A-GNSS) test scenarios, including generation of assistance data for Galileo.
The simulator offers real-time simulation of realistic constellations with up to 24 satellites and unlimited simulation time. Flexible scenario generation includes moving scenarios, dynamic power control and atmospheric modeling. Users can configure realistic user environments, including obscuration and multipath, antenna characteristics and vehicle attitude.
The all-in-one TRIUMPH-LS by JAVAD GNSS combines a high-performance 864-channel GNSS receiver, all-frequency GNSS antenna, and a modern featured handheld. The 864 all-in-view channels include Galileo E1/E5A/E5B, GPS L1/L2/L5, GLONASS L1/L2/L3, QZSS L1/L2/L5, BeiDou B1/B2 and SBAS L1/L5.
The TRIUMPH-LS offers GUIDE data collection, Visual Stake-out (VSO), navigation, six parallel RTK engines, more than 3,000 coordinate conversions, advanced CoGo features, and rich attribute tagging on a high-resolution, bright, 800 x 460 bright display. Two 3-megapixel cameras enable recording of images along with GNSS data.
With VSO, the virtual location of a point to be staked can be seen by a “flag” shown on the Triumph-VS camera image. This visual aid helps users navigate quickly to a point and makes stakeout jobs fast and easy. VSO can be used as a convenient way to get close to a target point before switching to the regular stakeout mode to perform precise measurements.
More than 100 channels are dedicated to continuous interference monitoring. The Triumph-LS monitors and reports interference graphically and numerically with patent-pending interference protection. Interference awareness allows safe GNSS operation in a city, airport and military environment.
The unit can serve as base or rover. It has a GSM modem, UHF transmit and receive, and an internal high-performance geodetic antenna.
The TRIUMPH-LS automatically updates all firmware when connected to a Wi-Fi Internet connection.
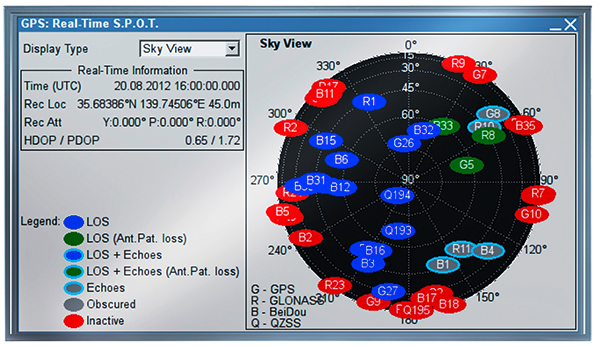
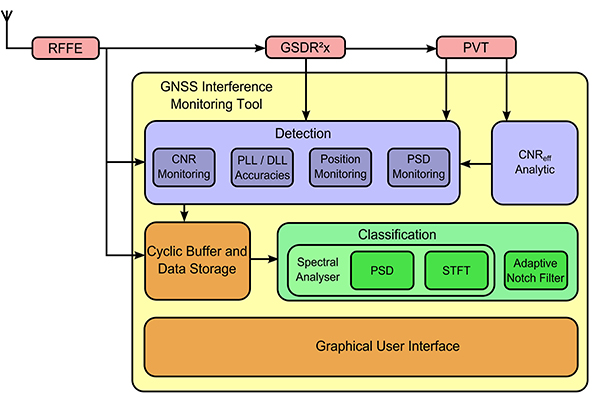
TeleOrbit’s software-defined radio receiver and GNSS interference monitoring tool receives and processes all available Galileo signals. Signals that are not yet transmitted and interference sources can be simulated and processed within the software tool.
Within a software-defined radio framework, the analog-to-digital converter is moved as close as possible to the antenna to perform most of the signal processing in software. This leads to adaptable solutions with lower hardware costs that can be easily extended to new signals and systems with only a software update.
The GNSS Software Defined Radio Receiver (GSDR2X) developed by TeleOrbit’s sister company TeleConsult Austria can track most readily available signals from Galileo, GPS and SBAS. By utilizing input from TeleOrbit’s GNSS multi-system performance simulation environment (GIPSIE), even signals not yet transmitted by satellites can be tracked and processed by the GSDR2X. Furthermore, input data can be read from various radio frequency front-ends, either directly or from file.
The modular GSDR2X framework enables new capabilities, such as the GNSS Interference Monitoring Tool (GIMT), which enables the GSDR2X to detect and classify interfering and jamming signals (see figure).
First and foremost, let’s give a big hand to Adam and Anastasia, the two Galileo FOC satellites that were successfully launched on March 27. Following the not-so-successful Galileo launch in August, it was imperative that this go smoothly.
Although the Double-A launch occurred after the conclusion of this year’s Munich Satellite Navigation Summit, anticipation of the event set the context for the entire convocation. The summit is a fixture on the European and global GNSS calendar. It is always intense, often spectacular and sometimes leaves one with contradictory feelings. This year it took place March 24-26 and sought to determine the future of PNT, encouraging delegates to look into the crystal ball and predict developments.
If we go by the number of times these words were repeated during the three days of the summit, the future will hinge around compatibility and interoperability. The multi-constellation GNSS is already here. The elephant in the room remains, as always, interference, but here integration of alternative sensors and signals should hold the key to continuous and possibly resilient operations.
As usual the summit kicked off with a high-level plenary in the imposing Allerheiligen-Hofkirche (Court Church of All Saints) in the Residenz München, the Bavarian royal palace. The welcoming speeches and presentations were interspersed with some pleasant jazz, and the atmosphere was relaxed.
Into the Crystal Ball
Matthias Petschke, director of EU Satellite Navigation Programmes at the European Commission, admitted that 2014 had been difficult, but he was looking forward to 2015. Clearly the deployment of the Galileo infrastructure — especially the space segment — was critical, and the March 27 launch was very much on his mind. However, he expressed confidence that the launch would be fine and that satellite production was, and would remain, on schedule. In the long view, he stated: “We will make it for 2020,” signifying full operational capability (FOC).
He also talked about stimulating global markets to foster uptake of Galileo and EGNOS, and this was discussed by Carlo des Dorides, executive director of the European GNSS Agency (GSA). The ground infrastructure is very much in place and preparing for the Galileo exploitation phase. A significant milestone in that process would be finding the right partner to lead Galileo operations for the next ten years. A tender was now in process to find that organization or consortium. Des Dorides described the process as a competitive dialogue with the emphasis on finding a partner who can inspire new ideas and provide innovative solutions. The contract is big, worth around 1 billion euros.
Carlo des Dorides, Executive Director of the European GNSS Agency (GSA), discusses the 1 billion euro tender, now in process to find the organization or consortium to lead Galileo operations for the next ten years. Photo: GSA
He also emphasized the successes for EGNOS in the year. Almost 180 airports now benefit from EGNOS-enabled approaches and more than 70 percent of “GNSS-enabled” farmers in EU use the EU’s SBAS.
Johann-Dietrich Wörner, chairman of the German Aerospace Centre (DLR) — and the nominated next Director-General of ESA – highlighted the growing dependence of critical services on GNSS. In this context multiple systems were not a question of competition; it was all about redundancy and safety. Multi-GNSS improves availability, accuracy and reliability.
The view from the United States was given by Harold “Stormy” Martin, Director, National Coordination Office for Space-Based Positioning, Navigation, and Timing in Washington, D.C. The GPS fleet was now 30 strong in orbit including four successful launches in 2014 and he stated the 2014 averaged user range error to be 70 cms — the best ever — and improving year on year.
One major upcoming trend is a realization that there’s a need to establish a U.S.-wide backup coverage for GPS outage due to natural or man-made interference. The U.S. is currently assessing alternatives with a decision likely in summer 2015.
There was a particularly warm welcome from the audience for Michael Khailov, deputy head of Roscosmos and co-ordinator for GLONASS. Last year the Russians were conspicuous by their absence at the Munich Summit, but for 2015, despite the intervening local difficulty in Ukraine, they were back in force. Khailov claimed that the sustainable development of the world depends on GNSS. On more esoteric ground he stated that GLONASS had maintained stable operations in 2014 and three more satellites had bene launched. Further launches would depend on operational circumstances. The user domains for GLONASS were continuously expanding. Continuing the summit text he said that it was better [working] together than separately — in fact separately often doesn’t work at all and therefore we must continue to promote interoperability and the Munich Satellite Summit is a good forum for this.
Jianyun Chen of the China Satellite Navigation bureau also took up the theme of all GNSS together. Sixteen Beidou (pronounced — for the avoidance of doubt — as ‘bay-doe’) had been launched since 2007 and the Chinese had been in discussion with Russia to ensure full interoperability with GLONASS. This process will be repeated with GPS and Galileo.
GNSS Updates
One of the idiosyncrasies of the Munich Summit is its very discreet signage. If you don’t know where it is — and specifically the correct side door that brings you up two floors to the main Max Joseph Saal venue — it is highly likely you’ll miss it! But once you are in it is two full-on days of updates on systems and discussions on a vast range of topics that impinge on the development and implementation of GNSS around the world.
Discreet signage. Photo: GSA
The first two session of the summit proper gave updates on the GNSS systems in operation and under development as well as the regional and augmentation systems. Much of the material was slightly more detailed versions of presentations at the plenary but a few news snippet emerged.
“Stormy” Martin said that a modified battery charge control had been implemented that would extend operational life for some of the fleet by one or two years. He also reiterated the improving accuracy performance of GPS which was now much better that its published standards. He predicted that the first GPS III would be available for launch in 2016 and said that GPS was improving every day.
Eric Chatre from the European Commission reiterated that Galileo was still expecting to start early services in 2016 with full operational capability in 2020. He expected 18 satellites to be launched by 2018. The new Ariane 5 launcher will enable the launch of four satellites at one time and the first launch with this system would be in 2016. In terms of the ground segment only one station in the Pacific was yet to be established.
Sergey Karutin of Roscosmos talked about a four-fold accuracy improvement for GLONASS with the use of new clocks and the introduction of new CDMA signals that will improve accuracy and access. According to Dongfeng Yu of the China Satellite Navigation Office the BeiDou constellation is moving from “regional to global, active to passive” and is aiming for global coverage by 2020.
U.S. SBAS developments were covered by Deborah Lawrence of the Federal Aviation Administration (FAA). The Wide Area Augmentation System (WAAS) now has 100 percent coverage for LPV200 in CONUS. More than 41,000 runway ends are now included, and she predicted full completion in 2016.
Jean-Marc Pieplu of the GSA talked about EGNOS status. The next system release (2.4.1) should be published in Q3 2015 and will include a significant input on ionospheric corrections. Further service evolution includes a plan to declare LPV 200 in Q4 this year and EGNOS coverage will be extended to 72 deg North and ensure full coverage of the 28 EU member states.
The Russian Augmentation system SDCM performs at 0.8 metre accuracy according to Grigory Stupak of JSC / Russian Space Systems. He noted new validated SDCM ground stations had been established in Antarctica and Brazil and stated that global exploitation was a key objective for SDCM as its satellite coverage was very wide. GLONASS and GPS together could ensure complete coverage. He also indicated that work was in hand for SDCM SBAS service certification for LPV 200 and he called for providers of all WAAS to work closely together.
2020 Vision
After lunch we were offered the chance to hear some expert views on the future of GNSS and PNT with Prof Vidal Ashkenazi of Nottingham Scientific Limited asking for their vision of GNSS in 2020. By that year there should be 100-120 GNSS satellites in orbit, multi-constellation receivers would be the norm, but what would be the new applications and what were the challenges?
Jamming and spoofing would still be issues. Pierre Bouniol of Thales thought that in civil aircraft receivers would probably incorporate jamming indicators by 2020 to inform users when signals may be compromised. For Stuart Riley of Trimble the key was integration of other sensor signals to bridge any GNSS signal outage. Gang Mao of Unicore Communications Inc. in China considered multiple frequencies to be a big help in reducing the threat of jamming. Nigel Davies of QinetiQ agreed saying there were a host of technical solutions but key for success would be solutions that use low power, are low cost and feature high usability. He also noted that safety certification of receivers for use in driverless vehicles would be required and this challenging application would need the provision of robust continuous navigation — and sub-metre accuracy.
The future market for GNSS was also discussed in a session that unveiled the GSA’s 4th Issue of its comprehensive GNSS Market Report. With almost four billion GNSS devices used worldwide and all regions experiencing growth, GNSS represents an unprecedented business opportunity. Over the past 15 months the GSA’s team of market monitoring experts has taken a close look at all aspects of the GNSS marketplace with analysis of both hardware and software market opportunities, technology trends and future developments.
Gian-Gherardo Calini, Head of Market Development at GSA, gives highlights of the comprehensive GNSS Global Market report. He will deliver this information in an April 16 webinar hosted by GPS World. Photo: GSA
The top-line results were presented by Gian-Gherardo Calini, Head of Market Development at GSA. GNSS is one of the few growing markets in the world showing 12.7 percent CAGR. It is a very attractive market with volumes and revenues driven by mass market segments: the dominant two being Location-based services and transport applications. This latest edition includes information a new market segment: Timing and Synchronisation. One area that is not included is security and government applications. Mr Calini indicated that this information has been collected by the GSA team but as it is essentially for users of the Public Restricted Service (PRS) it was not included in the open report.
Although the report is very much “Galileo flavored,” its findings are of great importance and value to whole GNSS community and will be the subject of a GPS World webinar with Mr Calini and myself on 16 April. You can register — free — for this informative global perspective now.
A panel discussion followed and covered a range of topics and applications from aviation to agriculture. Again the consensus was that chips would become multi-constellation and quickly. Philippe Prats of STMicroelectronic outlined automotive applications from insurance applications to advanced driver assistance systems (ADAS).
The role of government mandates in establishing markets was seen as positive. The e911 mandate in the states had provided the seed for GPS integration into smartphones. Similarly authentication was also seem as a significant future market driver.
Multi frequency was also showing on industry’s radar and in a couple of years will be a reality thought Philippe Prats with the main motivation being better accuracy. Frank van Diggelen of Broadcom highlighted the recent GPS World feature demonstrating cm accuracy on a smartphone.
Legal Issues
A dedicated session on legal issues was not the best attended part of the conference, which is a shame as it had some serious points to raise and highlighted a gap that is opening up between our technical abilities in GNSS and the legal basis for its use. The Munich Summit is to be commended for its commitment to providing a platform for these issues every year; they are often ignored elsewhere.
Oliver Heinrichs, a partner at BHO Legal in Cologne, emphasised the need to establish a firm regulatory framework and to ensure that any decisions did not cross World Trade Organisation (WTO) provisions and the General Agreement on Tariffs and Trade (GATT). In particular the idea of mandating a specific GNSS for applications such as emergency response systems in cars may well be incompatible with WTO rules.
Amedeo Arena of Universitá degli Studi di Napoli Federico II in Naples noted that all GNSS players were members of the WTO and considered that GNSS services and their trade was definitely “caught by the GATTs” so no favouritism for ‘home’ systems should be allowed.
Another area of controversy is automated vehicles. In discussion after the session I learnt that current international conventions governing the use of motorised vehicles require a human supervisory role at all times. There will need to be some fundamental legal groundwork done before the first driverless vehicles will be allowed out on the road for real.
These are legally complex issues and certainty will only come from test cases. Talking of complexity Aleksey Bolkunov of the Russian Federal Space Agency revealed that the legal, regulatory and standardisation measures governing GLONASS and GNSS in Russia consisted of more than 900 documents originating at various different levels of the state. This clearly gave great scope for “regulatory collisions” and he is involved in work to develop a single regulatory framework that should eliminate the remaining barriers to GNSS use in Russia.
Emerging Applications
Peter Grognard of Galileo Services chaired a final session of the day on emerging applications. Bruno Bougard of Septentrio saw dependable accuracy as key to emerging markets. He thought high precision driven by surveying was becoming more and more mainstream. For autonomous driving the challenge was to provide cost-effective, dependable accuracy at 10-30cm that was safe, reliable, and always available. This would require multi GNSS, multiple signals, highly integrated sensors and transparent and open augmentation.
For Neil Gerein of Novatel the mantra is “Accuracy, availability, assurance.” Users needed availability to their PNT solutions at all times. He also saw future applications integrating GNSS with inertial sensors and correction systems for high accuracy without the need for a base station.
or Neil Gerein of Novatel the mantra is “Accuracy, availability, assurance.” Photo: GSA
Lionel Garin of Qualcomm Inc talked about ADAS. Safety was paramount and he foresaw the need for rigorous design and certification procedures similar to that required for the aviation market. Fortunately the industry has lots of expertise here. Philip Mattos of u-blox UK argued that a volume market is in femtocell and small cell synchronisation in mobile networks where GNSS is the lowest cost solution.
Tom Stansell praised geometry as the most important and unique ingredient supplied by multi constellation GNSS. And the second most important ingredient was interoperability. He doubted users would care where their signals originated and devices would still be generically described as ‘GPS’ into the future. Application growth will be stimulated by the better geometry supplied by multi-GNSS constellations. When the E6 signal became available he predicted that 10cm accuracy would enable reliable lane keeping for ADAS.
And Galileo will supply E6 for free said Ignacio Fernandez Hernandez from the European Commission. Ignacio works on the Galileo Commercial Service design and outlined some significant differentiators of the European system including its broad signal for high accuracy and better multipath resilience, more stable clocks and improved ionospheric modelling compared to GPS.
Lionel Garin sounded a note of caution at the end of the session when he noted that multi constellation ability was good, but he was not sure what was actually gained beyond two, or perhaps three, constellations.
GNSS for Weather
The final day of the conference saw a few fragile heads courtesy of the previous evening’s Summit Space Night 2015 sponsored by Airbus Defence & Space, which took place at the Filmcasino am Hofgarten close to the conference venue. And the first session, chaired by Oliver Montenbruck from the DLR, certainly required a clear focus as we were taken through the use of GNSS in space geodesy, space navigation and reflectometry.
Roland Pail from the Technical University, Munich described results from the satellite gravity missions GRACE and GOCE that looked at mass transport processes on our dynamic Earth. A particularly sobering animation showed the extent of ice mass loss from Greenland over the past decade. But what is role of gnss here? The ability to give precise positioning of the satellites and the fact that the satellite orbits carry information on the gravity field.
Atmosphere sounding using GNSS radio occultation allows precise atmospheric profiles with global coverage in all-weathers. Jens Wickert of the Helmholtz Centre Potsdam said that since 2006 these high vertical resolution profiles had been making a significant impact on the world’s weather forecasting including improved hurricane forecasts. It was also a bias free technique for observing global temperature change. With a multi-GNSS future new missions could be planned as more signals would reduce noise. Combining GNSS and reflectometry could enable accurate tsunami detection from space. Similarly Prof Antonio Rius from Barcelona was using reflected GNSS signals to determine data on the surface of the sea such as surface roughness, extent of sea ice and early warning of a tsunami.
Stefan Sassen of Airbus Defence & Space described the LION GNSS navigation receiver for MEO and LEO platforms. The unit was qualified since 2014 and now 50 were on order. LION is highly flexible with multi-frequency, multi-constellation and multi-antennae configurations possible. It was accurate enough for autonomous orbit raising (a few kms) and or station keeping (to within 100cm).
Finally Manfred Sust of RUAG Space GmbH said that space borne gnss receivers were true enabling technologies for Earth Observation missions as precise orbit determination was key to capturing sharper images.
Alternatives
The second session of the day returned to the practical issues around possible alternative or complementary PNT (APNT) systems. As GNSS becomes ubiquitous many terrestrial PNT systems are being decommissioned (LORAN, VOR), but the potential vulnerability of GNSS signals to interference is highlighting the need for backup. The challenge being to balance functionality and cost in the search for “plan ‘B’ for GNSS” as chairman Michael Meurer from DLR described it.
The FAA’s Deborah Lawrence reiterated her plans for scoping and implementing a backup system to cope with a GPS outage in the US. The FAA is currently engaging with stakeholders to define what the minimum operational target for a GPS outage should be to set the basis for procurement activity. The timeline for a final investment decision was now December 2018.
For Europe Gerhard Berz of Eurocontrol thought there were many potential APNT in place and the topic was in the SESAR 2020 research programme. He thought existing DME could potentially do the job in Europe as it had good coverage, but the challenge is to get good geometry and coverage at low altitudes, in remoter areas and over water.
Prof Per Enge of Stanford University “put the moose on the table” and pointed to the 978 and 1030 ranging frequencies as an existing system that could be used for positioning. But how accurate was it? Airborne experiments had shown good agreement with GPS positioning with an accuracy of around 100m and in turns 300m, which was good enough in an emergency. Further tests using a UAV at spider infested Camp Rogers had demonstrated APNT in flight with 50m error. The UAV itself was specifically developed to navigate using APNT while looking for GNSS jammers.
Wouter Pelgrum of Ohio University discussed the relative merits of eLORAN, which has high power – and therefore difficult to jam – and beyond line of site accuracy of less than 10m, and alternatives such as collocation of pseudolites with mobile phone cell towers. This could also enable high accuracy indoors positioning applications. He believed that APNT will need to be context specific and there was no single solution.
Belabbas Boubeker of the DLR discussed modular APNT concepts while Nick Ward of the UK’s General Lighthouse Authorities indicated there was no coordinated policy on resilient PNT in the European maritime sector at present but his authority and others were exploring the possibility of using eLORAN as a commercial enterprise. Nine transmitters were operational in Europe and the service had been declared in 2014.
Michael Hoppe of Fachstelle der WSV für Verkehrstechniken said resilient PNT was a core element of e-navigation for waterways. A combination of techniques such as medium frequency RF, AIS and eLoran could give good accuracy in areas of highest traffic. First results of trials were encouraging.
Processing Power
The final session of the Summit to grab my full attention was chaired by Frank van Diggelen of Broadcom. He led a wide ranging debate on GNSS receiver architecture trends and more generally the future of chip design and fabrication: are we approaching the end of Moore’s law and if so — what next?
Recently “The balance of power has moved back onto the GNSS chip” to enable lower device power use. To highlight current developments Frank described a couple of Broadcom products: the Broadcom 4773 “location hub” that is at the heart of the Samsung Galaxy 6 “super smart phone” and the 4774 that can access signals from all four GNSS constellations and will be shipping in early 2016 on new smartphones.
In fact earlier this year the 4774 was used to make a first fix using signals from four different GNSS constellations (with signals from one each of GPS, GLONASS, Galileo and BEIDOU satellites) and a significant event in terms of our multi-constellation future.
Greg Turetzky of Intel talked about the benefits and challenges for GNSS in advanced silicon processes. He noted that Intel is now shipping 14nm technology and plans were in hand for the next two generations (10nm and 7nm). Moore’s law has been a great enabler for modern society. If automobiles had taken a similar development in the same timeframe we would all be driving cars with a maximum speed of some 300 000 km/hour that cost us around 4 cents to buy!
The big challenge for GNSS architecture was to take advantage of the smaller geometries while greatly reducing standby power. The integration of multiple radio sources to provide a single location solution was key giving ubiquitous location capability that will improve the experience of every mobile product.
Looking into his crystal ball, Peter Anderson of Integrated Navigation Systems in the UK saw that integrating signals from complimentary technologies and sensors would be important but would lead to a greater demand for digital processing. He predicted that multiband receivers would become standard in consumer devices. He also pointed out that the worst potential source of GNSS jamming for a smartphone was the phone itself! The move to dual frequency would be helpful here.
An overview of the Chinese XIHE system for seamless outdoor and indoor location was given by Dongkai Yang of Beihang University. This Beidou Innovative application provides a LBS system based on gnss and mobile communication networks to give a “fusion of communication and positioning for indoor positioning”. The system is being demonstrated in four areas in China in shopping malls. The target for positioning accuracy in the system is for less than 3 metres indoors and less than 1 metre outdoors.
Franz Kreupl of Munich Technical University gave a sobering view of “life after silicon” – essentially it looks like there isn’t one. He outlined the limits to silicon technology such as tunnelling current and predicted some further progress could be made in reducing interconnect sizes and via circuit design. But new candidate materials for semiconductor electronics from carbon nanotubes to widely hailed 2-D materials graphene and MoS2 all suffer major issues that seem to make them non-starters.
But do we need to keep on miniaturizing? Norbert Schuhmann of Fraunhofer IIS in Nuremberg thought that technology downscaling would have an end in terms of the physics, but especially in terms of reasonable cost. He thought 7nm and 2020 was the end point for the physics but that in fact 28nm should be seen as the actual last node in Moore’s law as from then scaling has no longer also been the path for cost reduction. He saw silicon on insulator technology and monolithic 3-D integration as possible paths forward, but the technology sweet spot — and well suited for GNSS — was 55nm and a format that was already extensively used in automotive applications.
NovAtel has announced significant performance improvements to its precise point positioning (PPP) solution. NovAtel CORRECT with PPP will now offer the new TerraStar-C correction service as its exclusive source for satellite-delivered PPP correction data.
TerraStar-C contains an enhanced correction data set that enables up to 4-centimeter accuracy and instant re-convergence when combined with the receiver error models and positioning algorithms offered by NovAtel CORRECT. This new level of PPP performance is available on NovAtel’s OEM6 receivers with firmware version 6.600.
NovAtel CORRECT is the positioning algorithm on NovAtel’s GNSS receivers that handles corrections from a variety of sources, including real-time kinematic (RTK), PPP, spaced-based augmentation systems (SBAS) and differential GPS (DGPS). NovAtel CORRECT with PPP combines GNSS satellite clock and orbit correction data from TerraStar’s global reference station network with NovAtel’s receiver algorithms to yield robust sub-decimeter positioning without the need for nearby base stations.
Correction data provided by TerraStar is delivered to the end user via Inmarsat satellites. With satellites visible globally, PPP is an ideal solution for precision applications where communications infrastructure is either unreliable or not available. In addition, applications where signal interruptions are common will benefit from a more robust positioning solution with the ability to quickly regain full accuracy following a temporary loss of GNSS signals, NovAtel said.
NovAtel customers with current TerraStar-D subscriptions have the option to upgrade to the new TerraStar-C service level free of charge. The new NovAtel PPP performance level is available immediately.
NovAtel Inc. has announced the FlexPak6D enclosed GNSS receiver, a flexible dual-antenna solution for application developers seeking a high-precision heading-capable positioning engine for space-constrained applications.
Designed for efficient and rapid integration, the compact, lightweight receiver tracks GPS, GLONASS, Galileo and BeiDou. Antenna placement is flexible, which means the antenna baseline can be set according to space available on the vehicle and the heading accuracy required. In addition, the modular nature of the FlexPak6D’s OEM6 firmware provides users with the ability to configure the receiver for their unique application needs.
Scalable for sub-meter to centimeter-level positioning, the FlexPak6D delivers NovAtel’s ALIGN precision heading and relative heading firmware, as well as its GLIDE firmware for smooth decimeter-level pass-to-pass accuracy, and RAIM for increased GNSS pseudorange integrity.
“Our FlexPak6D builds on our popular lightweight FlexPak form factor,” said Jason Hamilton, vice president of marketing for NovAtel. “The modular, flexible design makes it easy to integrate into land, air and marine-based industries, particularly for low payload UAV and robotic applications.”
The FlexPak6D will be available for shipping February 2, 2015.
LoJack Corporation is collaborating with Novatel Wireless to develop robust positioning and accuracy capabilities in the LoJackConnect for Inventory Management system. The system helps sales personnel at dealerships accurately track and actively monitor vehicle inventory across multiple lots, helping to minimize the time required in the regular dealer inventory process. Accessible via computer, tablet and mobile phone, users can verify vehicle location, access relevant vehicle information, track test drives and receive early warning alerts if a vehicle is moved from a geofenced location.
LoJack Connect for Inventory Management is powered by the Novatel Wireless 3060 OBDII solution for HSDPA/GSM/GPRS. The MT 3060 is a specialized OBD II telematics solution that offers advanced technology and a sophisticated feature set, combined with high quality and compatibility testing standards, Novatel Wireless said. With dual accelerometers, GNSS support, an open platform, and the N4A Content Cloud Management System, the MT 3060 enables LoJack to offer a reliable telematics solution to dealerships nationwide.
NovAtel, Inc.’s Calgary facility has been awarded the prestigious 2014 Manufacturing Excellence Award from the Association for Manufacturing Excellence (AME). The award acknowledges North American facilities that have demonstrated excellence in manufacturing and business, and recognizes NovAtel’s dedication to continuous improvement, best practices, creativity and innovation.
A representative of the AME presented the award to NovAtel at the company’s Calgary headquarters on October 23. NovAtel will also be recognized at the 2014 AME International Excellence Inside Conference, November 10-14 in Jacksonville, Florida.
NovAtel Inc. designs and manufactures high-precision, OEM, global positioning products and employs more than 400 people.
During their evaluation, the AME assessment team highlighted NovAtel’s work culture, observing that improvement systems were evident throughout the organization. They also praised the company’s commitment to creating a continuous improvement culture and systems. The assessment team remarked, “NovAtel leadership and plant employees can be proud of the site’s manufacturing excellence achievements to date.”
“We are very proud to receive an award which recognizes NovAtel as a leader in Enterprise Excellence in North America,” said Michael Ritter, president and CEO of NovAtel. “Fostering a culture of innovation, excellence and continuous improvement, in all aspects of our business, is something we strive for every day.”
Ritter added, “Our lean manufacturing initiatives are just one of the many ways we strive to add value for our customers. Making data-driven decisions in combination with fostering employee teamwork, mutual respect and accountability, throughout all levels of our organization, is essential to our long-term success in a global marketplace.”
“This award confirms that we are indeed on the right path 11 years into our ‘Lean’ journey,” said Mike McAloney, VP Operations for NovAtel. “We view ‘Lean and Continuous Improvement’ initiatives as the foundations of the operational excellence that lets us achieve our corporate mission: to generate customer success by providing precise positioning and augmentation technologies that are easy to integrate and provide exceptional return on investment.”
NovAtel is offering a sneak peak at its Velocity 2014 magazine, which features an informative technical article on precise point positioning, or PPP. The article, “Advanced GNSS Positioning Solutions with Precise Point Positioning,” discusses how NovAtel CORRECT is designed to optimally handle GNSS constellations and corrections to deliver the best possible positioning solution.
The new Velocity magazine is available at the ION GNSS+ conference in NovAtel’s booth, Booth J.
Anyone not able to attend ION GNSS+ will find Velocity 2014 bundled with the next issue of Inside GNSS, or can email NovAtel.
NovAtel is also offering a significant cost savings on the NovAtel CORRECT with TerraStar PPP positioning solution through September 30.
The NovAtel GPS-702-GG-HV high-performance pinwheel antenna comes in three colors. Photo: NovAtel, Inc.
NovAtel, Inc., has introduced the GPS-702-GG-HV to its line of high-performance Pinwheel antennas. Tracking L1/L2 GPS and L1/L2 GLONASS frequencies, customers can use the same antenna for GPS-only or dual constellation applications, reducing equipment costs and need for future redesign, the company said.
With the same form-factor and choke ring performance as the company’s other pinwheel antennas, the GPS-702-GG-HV has been enhanced even further to provide the robustness needed for use under high-vibration conditions.
The phase center of the antenna remains constant as the azimuth and elevation angle of the satellites change. Signal reception is unaffected by the rotation of the antenna or satellite elevation, so placement and installation of the antenna can be completed with ease. With the phase center in the same location for both the L1 and L2 signals and with minimal phase center variation between antennas, this antenna is designed for baselines of any length.
Enclosed in a durable, waterproof housing, the GPS-702-GG-HV comes in three colors: NovAtel standard grey, as well as desert tan and olive drab for military customers. The antenna is available for order beginning September 12.