Editor’s Note: This video was originally published on November 12, 2019.
Orolia debuted the GSG-8 advanced GNSS/GPS simulator, which is powered by Skydel simulation engine, at ION GNSS+ 2019 in Miami. Watch the video to get an overview of the GSG-8, which the company says was designed to deliver the highest standard of GNSS signal testing and sensor simulation performance in an easy-to-use platform.
Simulator vendors explain their evolution in response to changes in GNSS/PNT, comment on technical challenges they face, and outline principal markets.
GNSS receivers — which were never as simple as FM radio receivers or garage door remote controls — are becoming increasingly complex. The causes for this include continuing efforts to:
reduce their size, weight, and power (SWAP)
utilize new signals from up to four GNSS constellations
integrate them with other sensors, such as inertial measurement units (IMUs), cameras, and lidars
take advantage of a growing number of public and private, global, regional, and local correction services
meet the requirements of booming new markets, such as autonomous vehicles
mitigate the threats posed by the proliferation of unintentional and intentional RF interference, the latter better known as jamming, and by spoofing.
In short, receiver manufacturers must constantly adapt to a GNSS/PNT landscape that is, as one of the respondents to this Q&A put it, “ever evolving.”
In turn, the growing complexity of GNSS receivers requires increasingly sophisticated simulators to test receivers and their integrations in controlled conditions before field testing and deployment. Increasingly, this is achieved by replacing with software what was once done in hardware. Simulation remains a vital, though often underappreciated, segment of our industry.
On the following pages, five simulator vendors briefly explain their evolution in response to changes in GNSS/PNT, comment on the principal technical challenges they face, and outline their principal markets.
Spirent Federal Systems’ GSS6450 RF record and playback GNSS simulator is portable, for testing automotive applications in the field. (Photo: Spirent Federal)Lisa Perdue Product Line Director, Simulation Orolia
OROLIA
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
We have transitioned away from the GNSS simulator approach of using fixed, allocated hardware that we used in our early simulators to the more modern software-defined approach we use today. Given the ever-evolving PNT landscape, it is difficult to design hardware that will support all future GNSS and PNT simulation needs. Instead, we focus on the development of the Skydel software platform, which can then be used with the supported COTS hardware or turnkey system to generate the necessary signals. This gives us the benefit of maximum scalability and flexibility while being truly future proof.
The software-defined approach also allows us to offer Skydel in new and exciting ways. We aim to make PNT simulation accessible to everyone and we can do that through subscription and cloud-based simulation services.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today GNSS is only a part of the PNT picture. GNSS receivers are often tightly integrated with other sensors and many times the GNSS receiver cannot be isolated to test it on its own. Other sensors must also be stimulated or simulated and included as part of testing. Correction services are becoming more common, but many are proprietary with no public specification. With no common standards available, it can be technically challenging to create a one-size-fits-all test solution.
We tackle these challenges through our plug-in feature. The plug-in architecture allows you to expand the capabilities of Skydel by adding your own features or complex integration with other systems. It allows you to exchange information with the Skydel Engine and even integrates it into the Skydel UI. With our open-source SDK, which includes example plug-ins, you can create your data outputs synchronized to the GNSS simulation, such as IMU or correction services data.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
At Orolia, we say ‘Skydel Everywhere.’ Skydel is used in applications ranging from military encrypted receiver testing (SAASM, M-Code, PRS) to commercial applications supporting any of the GNSS signals available.
Skydel is used in systems that are found in labs, but you can also find Skydel at an individual engineer’s desk, or even home offices. In the field, Skydel has provided simulation and threat generation capability to authorized test ranges and field test events.
The broadsim software-defined GNSS is powered by Orolia’s Skydel GNSS simulator engine. (Photo: Orolia)
RACELOGIC
Julian Thomas Managing Director Racelogic
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Over the years, GNSS technology has changed significantly but our approach of identifying a need and creating a solution hasn’t changed since we launched our first LabSat GNSS simulator. We created LabSat because we needed a cost-effective, accurate and easy to use record and replay simulator that we could use for product development and production line testing for our VBOX Automotive and VBOX Motorsport technologies. This need could not be met by any other simulator manufacturer, so we developed our own solution, which in turn became LabSat. Although our approach has not changed, the needs of users, including our own engineers, have, so we continue to develop and improve LabSat to meet these needs.
With the increasing number of satellite launches in market segments such as communication and navigation, the number of requests for testing space-qualified receivers has increased dramatically. To test these kinds of scenarios, we have been making some major upgrades to simulate rocket launches and Earth orbit trajectories that require very different characteristics from land-based simulation.
As the number of constellations and signals has expanded very rapidly, the number of simultaneous signals that need to be simulated has put a far greater requirement on the computing power needed to render them. We have been working very hard on optimizing our routines to make the most of the new breed of high-performance multi-core processors. The result has been a big decrease in the time taken to create a scenario, and an increase in the number of signals that can be simulated in real-time.
What are currently the greatest technical challenges to GNSS/PNT simulation?
The biggest challenge is in simulating a large number of constellations and signals in real-time without using dedicated, expensive hardware to create them. The good news is that with the latest Intel Xeon processors boasting up to 40 cores and 80 threads, a much larger number of signals can now be created in real-time using off-the-shelf PC components.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
With the global pandemic causing national lockdowns, many engineers switched to working from home. Our largest growth in the simulator market has therefore been due to providing these engineers with a small, low cost, easy to use simulator that they can have on their desks at home, allowing them to continue to develop GNSS applications without having to go into the office. The markets these engineers work within are as varied as the markets that use GNSS technology.
We have also seen a big increase in the use of our simulators to test mass produced satellites used in providing global internet coverage. These satellites are being produced in large volumes, and the need for a low cost, reliable testing method on the production line has driven strong growth in this area.
Our simulators are often used in the field to gather data for in-lab testing, as small size and battery life are very important factors in this environment.
SPIRENT FEDERAL SYSTEMS
Phillip Bonilla Senior Systems Engineer
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Spirent has provided highly accurate simulation solutions since the early phases of GPS availability, starting with defined hardware for each signal type. As the GNSS landscape has grown, Spirent has worked closely with leading developers, adding key flexibility and functionality to adapt and provide a growing product portfolio. By adopting a robustly defined system architecture, and employing signal-agnostic hardware, Spirent simulators can generate any of the available constellations and frequencies, with no more than a few clicks of a mouse.
While broadening the support for the increasing number of constellations has been a focus, so too has the necessity to provide users with high numbers of available channels and auxiliary simulation needs. To complement GNSS simulation, significant effort is being devoted to resilient application testing, providing users with flexible solutions for introducing jamming and spoofing to the test environment. Our agnostic hardware supports signal generation using software defined radio (SDR), including interference sources and user-defined IQ signal data. As customer demands have grown, alternative RF and PNT sensors have been—and continue to be—incorporated, allowing users an expanded and comprehensive test environment.
The new spirent simulator generates alternative RF navigation signals concurrently with GNSS signals. (Photo: Spirent Federal)
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today, nearly all industries rely on GNSS or other PNT sources to some extent. With such varied and widespread use, laboratory testing is critical, and maintaining the highest levels of accuracy, reliability and robustness remains one of the greatest challenges. For modern hardware-in-the-loop configurations, simulation systems must be able to keep latency consistent to enable powerful post-processing of results. With this challenge in mind, we at Spirent design and manufacture our own hardware, ensuring precision and ultra-low latency.
Another significant test challenge posed by modern applications is the growth in vehicle speed and maneuverability. Creating a truly realistic test environment for supersonic and even hypersonic vehicles with high rates of spin and jerk places huge demands on a simulator. Spirent recently has introduced the industry’s first 2 kHz update rate, enabling the most accurate trajectories for the most mobile technologies.
Lastly, positioning engines are becoming more complex. In addition to GNSS and inertial, vision systems and a range of other sensors and signals-of-opportunity are providing developers greater opportunity for precision and robustness. Therefore, a core part of Spirent’s mission statement is delivering test equipment that is designed to be integrated into wider test benches and ensuring that equipment is always orders of magnitude more accurate than any device under test.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Spirent simulators are used in all phases of the product life cycle across nearly all applications. Receiver manufacturers use our solutions beginning with initial research and development, throughout product development, and well into production and field testing. Along with the ability to use Spirent’s simulators for live range testing, Spirent’s GSS6450 record and playback system enables users to record the real world in high dynamic detail for repeatable lab testing.
JACKSON LABS
Gregor Said Jackson President and CTO
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Initially, we saw a large demand for GPS-only solutions. We are shipping units into this market and it is growing more than 30% year over year for us. Recently, customers are looking to also supporting other constellations. There is an emerging market for LEO simulation capability. Many LEO constellations are becoming reality, such as OneWeb, Kuiper, Starlink, Iridium, Xona, and others, and customers are more frequently asking if we can support these types of signals in our simulators. Demand also is arising for additional base-band signals to accommodate the RF signals, such as synchronized raw IMU data and other observables. Jamming and spoofing signals also are being requested and reproducing these as faithfully as possible is a big challenge for synthesized simulation. Lastly, we see demand rising for mil-type secure applications, such as M-Code, PRS (Galileo) and P(Y) code SAASM of course. The complexity of future simulators will rise in lockstep with the complexity of the RF spectrum coming to us from space.
What are currently the greatest technical challenges to GNSS/PNT simulation?
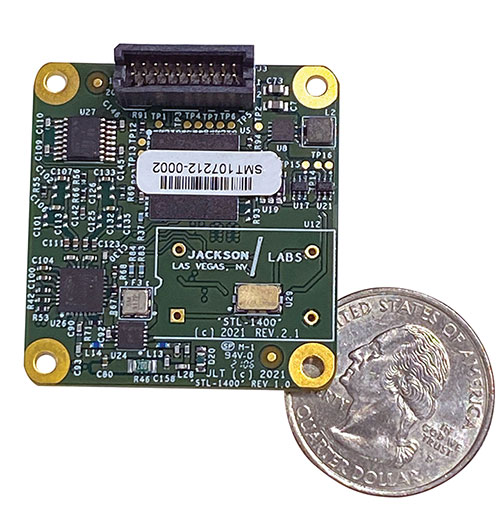
The STL-1400 positioning and timing receiver is designed for battery-operated low SWaP-C applications. (Photo: Jackson Labs)
A faithful reproduction of the real live-sky RF signals would rank high on this list. There are almost an unlimited number of out-of-band and in-band benign and adversary RF signals on a typical GNSS antenna these days, and more recently the sun has been acting up with solar flare activity that can disrupt GNSS signals. As GNSS receivers mature and become capable of tracking four, five or more carrier frequencies and constellations at once it becomes increasingly challenging to supply these types of signals from a simulator, and at a reasonable price-point. Sometimes, a wideband recording and playback system can do a better job at reproducing live-sky signals, however these systems are limited to playing back the same exact mission over and over again of course, and thus are not very flexible.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Our simulators are built for two different applications: the first is a traditional type of GPS signal simulation where a Windows application allows a user to set up static or dynamic scenarios, allows them to upload NMEA playback files, create jamming or spoofing signals, and generally tweak the RF signal in many ways, such as modifying power levels and antenna patterns and even creating space vehicle failures in real time. Our customers range from car, aircraft, and avionics manufacturers, to R&D labs, to the government and academia.
Our simulators also are used for a hardware-in-the-loop application that we call transcoding. It allows glueless retrofitting of existing GPS equipment with any and all the emerging PNT solutions such as LEO positioning and timing, celestial navigation, INS/IMU, CSAC holdover, and concurrent/multi-frequency GNSS using a 1×1-in. transcoder module. Our transcoders fly on Air Force aircraft, are used to retrofit telecom equipment, and allow deep-indoors and underground GPS reception. Transcoders created an entirely new market for simulators.
SYNTONY GNSS
Sylvain Daubas GNSS Simulators R&D Teams
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Manufacturers of GNSS receivers are targeting more precision and availability, especially in urban areas, which require acquiring more signals from more constellations and greater effort to minimize multipath errors. This confirms that an SDR design for signal generation is decisive to keep systems cost-efficient, as it directly benefits from Moore’s law. For instance, our new RTGS4-12 configuration is about four times more powerful (240 channels) than our previous standard configuration, for a similar budget level.
Regarding precision and RF quality, our simulators benefit from the same RF cards as Echo, our high-fidelity record and playback equipment, with a state-of-the-art RF front end: three channels at a 100 MHz sampling rate and a 16 bit IQ. The capacity to simulate protected signals is also crucial: with PRN Link, Constellator is ready for any present or future signal with encrypted spreading codes.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Building a CRPA simulator is not an easy task, as this requires extreme levels of phase and time synchronization between several RF outputs, typically four, seven or more. This can be done in two ways: with a dedicated new RF board running with a single synthesizer for all channels or using the classical one, to which one should add a complex calibration mechanism. SYNTONY has made the tough choice, investing more at first in a mono-synthesizer version. However, this will benefit our customers, for which the usage will be simplified and it will save them a lot of time by shortening the calibration phase. This version already is available for sale.
On another note, it is a significant challenge to keep our product and its interfaces user friendly while also enabling our clients to configure each of the more than 500 parameters available (at the last count). We also keep in mind that new signals may appear, from LEO constellations for instance, answering to new needs such as autonomous driving. Constellator is HW ready for them, only requiring a software update.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Constellator currently is mainly used in laboratories, in many market segments. Because it was initially built in partnership with spacecraft manufacturers, it benefits from the high standards of performance of space industries and includes several advanced space-dedicated features.
On top of the typical usage inside the labs, two other SYNTONY simulator products that are directly derived from Constellator are used in the field:
ECHO Recorder & Playback is used to record the GNSS environment with ultra-high fidelity: today @ 100Mhz, and before the end of 2021 even up to @ 200Mhz. ECHO has been used by our customers in cars, trains and often in aircraft test flights. Another usage of ECHO is to detect and record scintillation phenomena, as we will soon do in Brazil.
SubWAVE (GNSS coverage extension for underground places) allows indoor positioning with precision, directly compatible with standard GPS receivers, which can be crucial for safety or operational reasons. We have installed SubWAVE inside subways stations and tunnels (for example, in Stockholm, Paris and New York), in road tunnels (soon in France, in the “Tunnel du Mont Blanc”), in an underground bus terminal (also in Stockholm), in underground train stations (in Switzerland), and before the end of 2021 also in an underground mine (in Finland).
Integrated solutions address GNSS test requirements defined by 3GPP and major U.S. carriers
Orolia and Keysight Technologies Inc. have joined forces to advance 5G services by addressing GNSS test requirements defined by 3GPP and major U.S. carriers.
Working with Orolia allows Keysight to extend its 5G device test solution portfolio with advanced GNSS simulation capabilities. As a result, existing users of Keysight’s 5G device test solutions can easily address GNSS-related 3GPP protocol conformance and carrier acceptance test requirements by upgrading the software in Keysight’s E7515B UXM 5G Wireless Test Platform and combining it with Orolia’s GSG-8 simulator.
Skydel GSG-8 (Photo: Orolia)
The efforts of Keysight and Orolia will enable chipset and device makers to verify functionality to accurately position mobile phone users within a geographic area.
“Working with Orolia has enabled Keysight to deliver GNSS-based LBS test solutions for 5G protocol conformance and carrier acceptance validation,” said Muthu Kumaran, general manager of Keysight’s device validation solutions business. “Keysight’s LBS solutions also support assisted GNSS test functionality, enabling users to comprehensively address 5G new radio conformance requirements mandated by both the Global Certification Forum (GCF) and PTCRB.”
Accurate positioning is important in a wide range of sectors including healthcare, road and aerial transportation, entertainment and homeland security.
Future applications, such as drones and autonomous vehicles, will depend on highly precise positioning services for reliable navigation and safe transportation of people and goods. Mobile operators use GNSS technologies and non-GNSS technologies, such as beamforming, angle-based positioning and round-trip time to deliver personalized services and support emergency calls.
Keysight’s UXM 5G Wireless Test Platform. (Photo: Keysight Technologies)
The GSG-8 simulator, powered by the Skydel Simulation Engine, offers high performance, flexibility and an easy-to-use software-defined platform to deliver superior jamming and spoofing options that can help ensure accurate, continuous operations for critical applications during interference or signal loss. Automated and scalable, the simulator supports GPS, Galileo GLONASS and BeiDou, with upgrade paths for future constellations.
Keysight offers in-built positioning capabilities in the UXM 5G wireless test platform for non-GNSS positioning test requirements.
“We are pleased to collaborate with Keysight on developing solutions that improve PNT testing for 5G communication networks and devices,” said Lisa Perdue, Orolia’s Simulation Product Line director. “Our GSG-8 simulator, powered by Orolia’s Skydel Simulation Engine, offers ultra-high performance and unmatched flexibility. The easy-to-use software-defined platform also delivers superior jamming and spoofing options that can help ensure accurate, continuous operations for critical applications during interference or signal loss.”
Orolia has been awarded €70 million in two contracts to provide atomic clocks for the first 12 satellites of the Galileo Second Generation System (G2S). The first was from the European Space Agency (ESA) and the second from Leonardo.
Each of the new G2S satellites, designed to provide unprecedented accuracy worldwide, will contain three Orolia Rubidium Atomic Frequency Standards (RAFS) and two Orolia atomic clock physics packages integrated with Leonardo’s Passive Hydrogen Masers (PHM).
“We are truly honored to be selected by the European Commission, ESA and Leonardo to continue to supply our advanced space atomic clocks for the next generation of Galileo,” said Jean-Yves Courtois, CEO of Orolia. “Our dedication, hard work and innovative design for all the clocks in the current Galileo constellation have contributed to the most accurate GNSS system in service today. We look forward to continuing to support the Galileo program with the most advanced GNSS timing technology available in the world.”
Orolia’s RAFS is an ultra-stable rubidium atomic clock able to deliver a frequency stability of about 2 x 10-14 over averaging intervals of 10,000 seconds. The Leonardo PHM, with its excellent frequency stability performance, is the master clock for the Galileo satellite payload. The maser technology embedded on Galileo offers superior stability compared to all other types of clocks onboard navigation satellites, according to Orolia.
The RAFS Flight Model atomic clock will fly aboard the second generation Galileo satellites. (Photo: Orolia)
Orolia has delivered more than 140 RAFS Flight Models worldwide, with 114 flying on GNSS satellites. In addition, 100 PHM Flight Models have been delivered worldwide, and 56 are flying on the current Galileo constellation.
According to ESA, the G2S satellites will revolutionize the Galileo constellation, joining the 26 first-generation satellites currently in orbit. They will be much larger than the existing Galileo satellites, use electric propulsion for the first time, and feature a more powerful navigation antenna. The G2S constellation should achieve decimeter-scale positioning precision.
In May, the European Commission and ESA announced the selection of Orolia to provide its Skydel GNSS signal simulation core engine for the G2S radiofrequency constellation simulator.
The Galileo program is managed and funded by the European Union. The European Commission, ESA and EUSPA have signed an agreement by which ESA acts as design authority and system development prime on behalf of the commission and EUSPA as the exploitation and operation manager of Galileo.
UNMANNED SOLUTION, a South-Korean company based in Seoul, develops autonomous vehicles, including driverless shuttles, autonomous agricultural equipment, robots, and educational platforms. (Image: SBG Systems)
What is complementary / alternative positioning, navigation, and timing (PNT)? In this month’s cover story, five of our marketing partners share their perspective on this question and explain how their products address it.
The four global navigation satellite systems (GNSS), two regional navigation satellite systems and public and private augmentation services continue to provide exceptional levels of accuracy and reliability for positioning, navigation and timing (PNT). Yet their well-known vulnerabilities also continue to fuel the need for alternative/complementary sources of PNT data, especially for new and rapidly expanding user segments such as autonomous vehicles.
What constitutes a complementary service to GNSS for PNT and what constitutes a true alternative is partly a matter of definition and opinion. In a January report, the U.S. Department of Transportation stated
…suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS. To achieve the parallel objective of resilience, as described in Executive Order (EO) 13905, that path should involve a plurality of diverse PNT technologies. Promoting critical infrastructure owner/operator use of those technologies that show strong performance, operational diversity, operational readiness, and cost-effectiveness is worthwhile. Based on this demonstration, those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber optic time services to transmitters/control segments. (Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.)
A portion of the former USCG Loran Support Unit in Wildwood, New Jersey, with its iconic Loran antenna. (Image: UrsaNav, Inc)
For this year’s Q&A on complementary / alternative PNT, I asked five companies in the GNSS/PNT space to tell us how they define the issue, what solutions they prioritize, what markets they target, and which of their products specifically address the need to make PNT more resilient.
Roger Hart: The deep adoption of the state-sponsored, space-based global navigation satellite systems (GNSS) defines them as the primary PNT source at this time. Inertial navigation, long predating GNSS, does provide an independent navigation solution but does not provide time. In today’s conversation, alternative PNT generally refers to deriving position and timing from existing signals not purposed for navigation, to ground-based location systems, and also to emerging satellite systems that operate at higher power — or out of the GNSS band — to provide a diversity of PNT sources.
David Sohn: Simply put, alternative PNT is usually anything that is not GNSS. So, this includes PNT derived from low Earth orbit (LEO) satellites; vision, radar, lidar combined with inertial measurement units (IMUs) and map matching; positioning off cellular WiFi, digital TV signals and other signals of opportunity; legacy nav aids like VORTAC, ILS, DME and eLoran; and new dedicated infrastructure positioning systems like Locata, NextNav or RFID.
Matthieu Noko: Here at SBG Systems, for 15 years we have been developing navigation systems based on smart coupling of GNSS technology and inertial sensors. From our perspective, inertial sensors as well as sensors such as odometers or DVL, combined with high-end algorithms and RAIM, build consistent alternatives to GNSS-only systems in the vast majority of outdoor applications. Inertial sensors dramatically enhance GNSS-only navigation systems, making it possible to provide navigational data during GNSS outages in urban environments or to reject false GNSS measurements due to multipath effects.
As its entry into the driverless category of the Formula Student Germany car race, AMZ modified the car it has used in competition since 2015 to be driverless. (Image: SBG Systems)
The hybridization of several technologies makes it possible to reach a sufficient reliability level for the majority of commercial applications. However, in some indoor applications or in case of intentional jamming or spoofing, a higher resiliency is required. Using visual odometry can then complement quite effectively the navigation system, although this technology is still at a research level. Compared to infrastructure-based alternative PNTs — such as WiFi, Bluetooth or ultra wideband (UWB) ranging — visual odometry has the great advantage of not requiring any infrastructure.
Jacob Amacker: GNSS remains the dominant method of PNT in terms of market applicability and performance, but there are many rival technologies that have great potential and will compete with GNSS going into the future. The most important changes in PNT will be methods of position localization that are able to replace GNSS, and we will likely see these technologies integrated into huge systems, making use of ubiquitous technologies such as lidar. Whereas GNSS still provides the most accurate timing, as systems get more complex, time synchronization becomes a bigger issue, so different methods of this need to be explored.
There are many ways of improving the navigation data overall. Most commonly an IMU and a Kalman filter will be employed to stabilize any errors in the position localization method. A Kalman filter is a method of processing data from a range of sources—say, GNSS, an IMU, and a wheel speed sensor—and using them in such a way as to arrive at the position with a greater accuracy and precision than either source alone would be able to achieve. This process, however, requires precise timing for each data stream. Therefore, one area in which alternative PNT has to compete with GNSS is timing precision. GNSS makes use of atomic clocks used on satellites that are as accurate as you will get. There are also several ways of synchronizing time. A timing system can only be as precise as the most precise clock on the network, but there have been developments, such as Precision Time Protocol (PTP) that can synchronize timings across a network of clocks over Ethernet connections. Traditionally, PPS has been used and whereas this is still very precise it is not able to compete with PTP on convenience or sophistication.
Charles Schue: The common definition these days for “alternative PNT” seems to be with respect to, or as compared to, GPS or GNSS. Even the U.S. DOT’s website speaks to PNT as related to GPS.
I used alternative, complementary and backup somewhat interchangeably during my entire career with the U.S. Coast Guard. In recent years, I injected “co-primary” into the conversation as well. Prior to GNSS becoming ubiquitous, alternative, complementary and backup were not technology-based terms, but were instead operationally based. For example, “the prudent mariner” or “the prudent aviator” should use all means at their disposal to safely navigate their platform. For the navigator, this would include visual, audible and electronic signals or aids. The solution of choice obviously was the one that provided the highest accuracy, availability, integrity and continuity. However, prudence required always checking the solution of choice against other readily available alternatives, preferably that complemented each other, to ensure safety and continuity of operations. At one time, shipboard navigators might have at their disposal Loran-C, OMEGA, GPS, INS, radar, sextant, visual bearings (such as lights and landmarks), beacons, and soundings. Similar alternatives were available on aircraft.
Although always in the mix, timing was often in the background until around 2000. Then it started to become as important as positioning and, in many areas, even more important than positioning. Today’s incredible dependence on technology, and interdependence between technologies, means that knowing your “when” has become as important as knowing your “where”.
Whatever the terminology, the definition of alternative PNT should include some key features. Firstly, we should accept that the solution of choice today is GNSS, and we should define it as primary or co-primary. Next, we should acknowledge that when the primary solution is available and trustworthy, it should always be used, or at least considered. Finally, the primary solution should continually be compared with alternatives to ensure safe and secure provision of PNT to the user. Thus, an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from alternatives to withstand the effects that might be affecting the primary solution.
Do you agree with the U.S. DOT’s assessment, cited above, of what it will take to make the national PNT much more resilient and reliable? If you do, how do your offerings fit into that framework?
RH: While there are intricate differences in the signals generated by the primary PNT systems, they are all quite similar in terms of frequency and power and are all vulnerable to the same types of interference. Achieving the most resilient solutions will require the use of alternative RF bands and non-RF sources. Having a variety of alternative PNT sources will allow users to integrate the method most applicable to their platform constraints. Integration across the various PNT sources will need time synchronization to take full advantage of the alternate PNT systems. Our offerings work concurrently with GNSS, providing simulation and testing of GNSS and alternative PNT as true complements, while also offering the ability to measure timing accuracy in real time.
DS: Yes, we agree with the DOT’s assessment. However, to be clear, the DOT does not require “LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber-optic time services to transmitters/control segments.” It stated that to achieve resilience, systems “…should involve a plurality of diverse PNT technologies…that show strong performance, operational diversity, operational readiness and cost-effectiveness.” Their demonstrations showed that those technologies they called out meet these criteria. Our solutions have been leading this resilient approach by offering several diverse, alternative PNT references.
We have fielded time-server equipment that operates from both GNSS and eLoran. Our standard offering time servers are equipped with multiple references from GNSS, network-based time services from NTP, PTP and PTP WR; internal references from disciplined atomic clocks; wireline references from IRIG, 1PPS or ASCII time code; and LEO PNT reference from the STL signal.
(Image: SimonSkafar_E+_Getty Images)
L-band or more generally the use of geostationary satellites was until very recently the only communication link for PNT augmentation services, although these signals are weak and easily disturbed or masked, especially at high latitudes. Resilient navigation will clearly need to allow multiple downlinks for corrections such as terrestrial networks (4G/5G) or satellite-based internet. In the mid-term, we expect the correction delivery over IP to become the standard, and L-band corrections to be used as a backup only. All our high-performance products already include an NTRIP client able to handle the IP corrections very easily.
JA: This is certainly one option. Largely, it is borne out of a need to compensate for the disadvantages of GNSS. This larger range of frequencies would provide a range of satellite-borne signals that have different penetration characteristics and information carrying properties but the same core purpose. Therefore, somebody making use of such a system will be better able to receive these signals even when under obstructions. Of course, some obstructions will still be impenetrable to GNSS signals and there is a long way to go to developing a comprehensive solution that can deal with timing differences when the signals travel through objects. It is likely that some other source of timing information, for example through the proposed fiber-optic services, will be necessary to smooth out these issues. Although we will see this much-needed upgrade to cover the shortfalls of GNSS employed, many other alternatives will start to take prominence. It is difficult to say which solution will win out, and it is likely that an upgraded GNSS will continue to dominate for the next decade or two at least. In terms of our offerings, we are exploring all possibilities and keep our core technology open to any position localization method. Of course, we will welcome any new technology that is a viable and improved method of PNT.
CS: I have long been an advocate of a system-of-systems approach simply because there is no PNT solution available yet that works everywhere, under all conditions, for all users, all the time. Many solutions provide only a component of PNT: an INS provides position (the “PN”), and an atomic clock provides time (the “T”). However, an INS does not know “where” it is without initialization and updates, and an atomic clock does not know “when” it is without initialization and updates. Fiber is awesome but is not wireless. Many alternatives depend upon GPS/GNSS as a necessary input. Others are augmentations that depend upon GPS/GNSS as inputs and not direct alternatives, such as space-based or land-based augmentation systems. Some are mode-dependent — such as VOR, DME, ILS, and TACAN for aviators — and thus not useful to other modes: time/frequency, maritime, land-mobile or handheld.
So, yes, we agree with the government’s assessment that low-frequency (LF), generally referring to eLoran in the United States, is the best, very wide area, terrestrial, wireless alternative, and is an essential component of any resilient PNT framework. Irrespective of whether the implementation is Loran-C, eLoran or LFPhoenix, LF is the lowest cost terrestrial PNT solution per million square miles of coverage. All our offerings are focused on the LF portion of the resilience framework. Our offerings easily integrate with any existing PNT technology and have proven in real-world government testing their ability to survive heavy jamming and spoofing environments.
What markets and applications do you target?
RH: Spirent Federal provides simulation test solutions to U.S. government and affiliated organizations. Applications range from core GNSS receiver development to real-time, hardware-in-the-loop system integrations. We have a long history of supplying the U.S. government and contractors with first-to-market products, from Y-code, SAASM, inertial and M-code, to sensor fusion of the latest alternative signals and sensors. We provide test solutions to safety-critical applications that are expected to have the same level of operational performance both in GNSS-available and GNSS-denied environments. Providing a single test platform that can help validate performance in both environments has received positive responses from users in the autonomous vehicle industry.
DS: Aerospace and defense, data-center and communication networks, public safety, industrial control, search and rescue, and space.
Autonomous self-driving mobility solutions move people and goods at appropriate speeds in urban and campus environments. (Image: SBG Systems)
MN: SBG targets a large range of applications including from a relatively small BVLOS drone for remote operation to large hydrographic vessels or airborne survey. We divide the applications into two main categories:
Surveying and mapping, where the inertial navigation system is used to stabilize the measurements from a lidar, sonar or camera to generate high-precision maps.
Control applications, where the PNT and orientation solution is used in real time to feed autopilot or to stabilize a camera. These applications include unmanned vehicles, machine control, camera pointing and more. High resilience is then critical to ensure safe navigation.
JA: Two main applications we are targeting with alternative PNT are surveying and ADAS systems. Both of these applications often make extensive use of lidar systems. We are therefore looking at lidar-based simultaneous localization and mapping (SLAM) algorithms to aid PNT or to provide relative position localization without GNSS. In cases when GNSS is totally unavailable, it is usually possible to set up ground control points. Although these cases are limited, they give much more flexibility in options. Anticipating a future where autonomous driving is the norm and not the exception, new building projects will need to be planned with the adequate systems in place to allow for them, and this will include a system such as UWB.
CS: Our employees have been involved in the design, development, deployment or sustainment of every Loran-C and eLoran system site in the world (transmission, control or monitor) since the mid-1970s, including components of the Russian Chayka system. Our service provider and end-user technologies are operationally proven in commercial and military environments. We specifically target the maintenance and upgrade of existing systems, as well as the implementation of new systems, globally.
Which of your products directly address the need for alternative PNT?
RH: In a broad sense, Spirent offers a market-proven and innovation-driven solution portfolio for the simulation of inertial sensors through the SimINERTIAL and SimSENSOR product lines, seamlessly integrated with our GNSS simulation. Spirent is actively engaged with several alternative RF vendors to incorporate signal simulation capability and will offer an alternative RF navigation product in 2021 called SimAltNav Replay. This product will allow for concurrent GNSS and alternative RF signal simulation. Additionally, Spirent offers many other alternative PNT solutions for testing resilient systems for connected vehicles and sensor-fusion algorithms for tactical and military-grade systems. We are developing new products to incorporate an open Ethernet interface allowing for open-source Ethernet-based sensor simulation.
Remotely controlled rovers are used to test and practice complex tasks in Mars-like desert environments. (Artist’s Rendering: Stocktrek Images_Stocktrek Images_Getty Images)
DS: Our time servers are equipped with high-quality precise internal time references such as OCXOs or atomic clocks and then disciplined by external references such as GNSS. They are resilient because they can operate precisely for long periods in GNSS-denied situations as standalone devices in holdover mode or from multiple alternative references, such as:
network-based NTP, PTP and PTP WR time services
wireline references from IRIG, 1PPS or ASCII time code
LEO PNT reference from the STL signal
eLoran when available
They are also resilient because they detect and mitigate interference from the GNSS signal before it can corrupt the PNT solution.
Our GNSS simulators are adding alternative PNT features to provide a complete test and evaluation solution for resilient PNT systems. We have recently added INS/IMU test features and have integrated with Anritsu’s cellular test stations to evaluate and qualify combined GNSS/cellular location functions. Orolia GNSS simulators support generation of custom GNSS signals and playback of IQ waveforms, and provide complete toolsets for GNSS jamming and spoofing testing. This allows creation of the threat environment to allow evaluation of alternate PNT signals as backup or alternative to GNSS. Orolia offers an open-source framework allowing any end user to develop their own sensor plug-in leveraging the Skydel simulation engine.
Our Resilient PNT for Defense product line includes the VersaPNT, which uses alternate non-GNSS PNT sensors such as IMUs, barometers, wheel ticks, INS and non-GPS-based LEO satellites. Alternate RF navigation or non-GNSS sources of radio frequency (RF) are of interest in highly degraded or contested signal environments. Interest is focused on low-Earth-orbit (LEO) constellations. These systems offer high receiver signal power (relative to GNSS) and a secure and resilient link to augment GNSS.
MN: All our products are designed to answer to challenging GNSS conditions, starting with our Ellipse series, which includes an industrial-grade IMU capable of coping with short-term GNSS outages. Its miniature size allows integration in robotics and also makes it suitable for cost-sensitive applications. Our Apogee and Horizon series, with their navigation-grade IMUs, are the most resilient systems in the event of GNSS outages. These products reach very high-end performance in real time, but become exceptional when used with our post-processing software Qinertia. Tightly coupled algorithms make the solution capable of coping with long-term GNSS outages.
JA: We have previously created solutions using retroreflective strips for path following with driving robots. and we are also compatible with Locata’s system, a large infrastructure solution popular for automation in shipping ports. More recently, we have released an offering for UWB in an integration with Pozyx. This is perfect for GNSS-denied environments as a direct replacement for what GNSS can provide in terms of position information. We are also exploring alternative ways to synchronize clocks and get timing information. This year we have developed PTP functionality on all of our devices. Alternative PNT is going to be vital as we look to the future of navigation and thinking about how we can navigate flawlessly anywhere and address more complex environments, particularly urban areas.
CS: We are focused on the provision of terrestrial low-frequency equipment and systems for primary, co-primary, alternative, complementary and backup PNT. We provide all the products and services required to design, develop, install, certify, operate and maintain Loran-C, eLoran and LFPhoenix equipment and systems. We provide the technology to perform coverage diagrams and site surveys; all the equipment required at a transmission site; all the equipment required at a differential reference station or quality-of-service site; all the equipment required for a monitor and control site; ASF measurement and analysis equipment; and various models of end-user equipment (including receivers and antennas) for the timing/frequency, maritime, aviation, land-mobile and handheld markets.
Orolia Defense & Security delivers M-code-enabled timing and synchronization to Lockheed Martin
In September 2019, Lockheed Martin was awarded a contract to develop the U.S. Army’s Sentinel A4 radar system, an air and missile defense radar that will provide improved capability against dynamic threats.
The following November, Orolia Defense & Security announced the availability of M-code military GPS receivers in its flagship SecureSync — the first time server approved by the Defense Information Systems Agency.
Orolia is supplying SecureSync units for Lockheed Martin’s Sentinel A4 radar. (Photo U.S. Army)
This May, Orolia delivered a shipment of M-code-enabled SecureSync mission timing and synchronization units to Lockheed Martin, marking a key milestone for the Army program. SecureSync with M-code provides enhanced resilient positioning, navigation and timing (PNT) capabilities and improved resistance to existing and emerging GPS threats, such as jamming and spoofing.
Lockheed Martin selected Orolia’s SecureSync M-code as the A4 system’s resilient time and frequency reference solution in part due to its modular, open architecture – the same characteristics that are the cornerstone of the radar’s design – making integration a simple process and ensuring future upgrades.
“As a trusted Lockheed Martin partner, Orolia is proud to support the development of the Sentinel A4, which will be a key asset to our warfighters for decades to come,” said Hironori Sasaki, president of Orolia Defense & Security. “Making M-code available now in a readily configurable and scalable form factor is a critical step in advancing our forces out in the field, whether in the air or on the ground,” Sasaki added.
The next-generation of U.S. military systems are fortified with M-code, and Orolia leads the industry in M-code solutions for navigation warfare (NAVWAR) environments.
Orolia is supplying SecureSync units for Lockheed Martin’s Sentinel A4 radar. (Photo U.S. Army)Image: Orolia
The new cost-effective small form factor is designed for NTP and PTP functionality
Photo: EdgeSync
Orolia has introduced EdgeSync, a new cost-effective network timing platform that provides Network Time Protocol (NTP) and Precision Time Protocol (PTP) Grandmaster and Boundary Clock functionality for real-time edge applications.
High performance, scalability, ease of use and manageability make EdgeSync particularly suitable for a wide range of applications, including data centers, finance, mobile edge computing, enterprise, smart grid, industrial internet of things (IoT), process control or telecommunications.
“EdgeSync is a great addition to Orolia’s timing product line because it’s ideally suited to meet the demanding requirements of today’s modern networks, including 5G infrastructure,” said Jeremy Onyan, director of Time Sensitive Networks at Orolia. “It delivers NTP and PTP capability to industries like process control, broadcast and telecom in a cost-efficient form factor that doesn’t sacrifice performance while taking advantage of the growing demand for edge applications.”
EdgeSync uses a multi-GNSS receiver (GPS, Galileo, GLONASS, Beidou and QZSS), PTP and Synchronous Ethernet (SyncE) as input references and generates PTP, SyncE, NTP and timing signals (10 MHz, 1 PPS and Time of Day message) as outputs. It features dual 1 GbE ports for both copper RJ45 and optical network timing connections.
EdgeSync also can provide IEEE 1588-2008 (PTP) Grandmaster and Boundary Clock functionality. The device leverages unique PTP algorithms to deliver stringent timing for demanding, precise applications and supports multiple industry PTP profiles for interoperability. An enhanced oscillator and PTP slave capacity option allow users to choose the EdgeSync performance level to meet their specific needs.
EdgeSync is available both in the Orolia Online Store (shipping to U.S. addresses only) and directly from Orolia technical sales representatives.
Latest advancement from Skydel uses software-defined advantages to deliver real-time performance
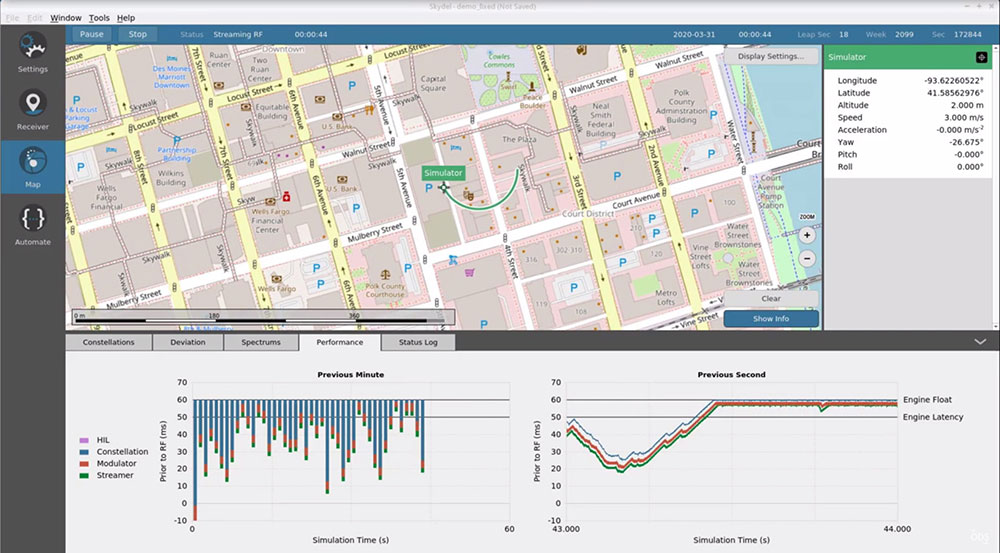
The Skydel Real-Time Performance graphs illustrate the software-defined engine’s low latency during a GNSS simulation. (Screenshot: Orolia)
Orolia has announced the launch of its Real-Time Performance capability, which achieves an ultra-low latency of five milliseconds. The feature will be standard on all Skydel-powered GNSS simulators.
Skydel is a software-defined simulation engine that powers Orolia’s advanced GNSS simulators including its BroadSim (available via Orolia Defense & Security) and GSG product lines.
“Skydel is known by users for its intuitive nature and ability to be quickly redeployed for a variety of projects,” said Tim Erbes, director of engineering for Orolia Defense & Security. “Delivering Real-Time Performance with latency as low as five milliseconds further shows that Orolia is a market leader empowering our customers by exceeding their expectations.”
Skydel’s software-defined architecture is designed to meet the demanding GNSS simulation testing requirements in the automotive, military, space and other high-tech industries. Skydel also supports hardware-in-the-loop simulations without sacrificing ultra-low latency and high-end performance.
The user interface has a sophisticated dashboard showing Real-Time Performance graphs. The tool enables users to grade the simulator’s performance, interpret data, diagnose inefficiencies, and optimize scenarios on the fly. In a video tutorial, Orolia demonstrates how the simulation engine processes data and how easy it is to read the graphs through its visualization and precise indications. As the system reaches its limits, it remains stable and fully operational, preserving the integrity of the simulation.
Erbes said the Real-Time Performance graphs not only instill confidence in the simulator, but also allow for better integration in the testbed.
“For example, instead of just hoping their hardware-in-the-loop configuration is working, users can view the real-time data and see that low latency is being maintained,” he said. “This feature provides enhanced visibility not only into the performance of the simulation, but also into the reliability of the hardware-in-the-loop integration, resulting in a more robust solution. This is critical when generating complex environments with high dynamics, jamming, spoofing, repeating, and alternative PNT sensors.”
The European Commission and the European Space Agency (ESA) have selected Orolia to provide the core GNSS simulation engine for the Galileo Second Generation (G2G) RF Constellation Simulator (G2G RFCS).
While the first launched Galileo satellites are reaching the end of their theoretical operational life, the G2G initiative includes the preparation of a future generation of Galileo global infrastructure, from satellites to ground segments, to maintain current services as well as provide improved performance and Required Navigation Performance (RNP) features to all users.
In this context, Orolia has been selected to participate in the G2G RFCS activity, which will support G2G signals evolution requirements.
The primary objective of the G2G RFCS initiative is to design, develop, manufacture and test an enhanced radio-frequency constellation simulator dedicated to Galileo engineering and experiments. This simulation technology will enable scientists and industries to verify, demonstrate and validate the future G2G configuration.
To meet these requirements, Orolia will provide the core GNSS simulation engine based on its Skydel software technology, within a custom hardware configuration, to simulate all Galileo signals including Open Service (OS) and Public Regulated Service (PRS). Orolia’s GNSS simulators offer the high-end performance level and flexibility required to configure this new testing infrastructure in a software-defined solution.
“With this project, Orolia demonstrates the Skydel platform’s exceptional flexibility to meet critical application requirements and serve as the core engine to design the next generation of GNSS signals,” said Orolia CEO Jean-Yves Courtois. “We are very proud to work with ESA, GMV and Tecnobit to help develop the next generation European Galileo constellation.”
Anritsu Corporation and Orolia announce immediate support of assisted GPS (A-GPS) test functionality to meet 5G New Radio (NR) Carrier Acceptance Testing (CAT) requirements for multiple North American operators on the Anritsu ME7834NR 5G mobile device test platform.
As part of the strategic partnership between the two companies, Anritsu leverages Orolia’s GNSS simulation capabilities to deliver A-GPS CAT testing platforms featuring the new Orolia GSG-SKY-ANR solution. The Anritsu MR7834NR supports A-GPS, FR1, FR2, FR1+FR2 NSA and SA US operator signaling requirements on the same platform.
The ME7834NR 5G NR mobile device test platform. (Photo: Anritsu)
The A-GPS simulation component of Anritsu’s ME7834NR-based test solution leverages Orolia’s GSG-SKY-ANR simulation platform. The GSG-SKY-ANR is powered by Orolia’s award-winning SKYDEL simulation engine, which delivers flexible, scalable, and efficient GNSS/GPS simulation solutions. The GSG-SKY-ANR GNSS simulator is exclusively available to Anritsu ME7834NR customers.
Anritsu ME7834NR A-GPS-enabled solutions for 5G NR CAT requirements are available immediately. The test solutions support the rollout of nationwide 5G networks by helping to ensure device compliance and optimum operability.
“Anritsu continues to address the needs of our customers globally,” said Shinya Ajiro, general manager of Anritsu Corporation. “By partnering with Orolia, a worldwide leader in GPS simulation technology, we are introducing a reliable, accurate, and cost-effective A-GPS CAT solution that conforms to operator requirements and delivers repeatable results. We remain committed to provide the validation tools necessary for mobile operators, device makers, chipset manufacturers, and test houses to verify designs and ensure product performance. This benefits everyone in the mobile ecosystem.”
“Orolia is proud to support North American operators through our partnership with Anritsu,” said Lisa Perdue, simulation director at Orolia. “Our resilient GPS simulation solutions deliver proven high-end capabilities for critical technology challenges such as the implementation of 5G.”
The world is moving quickly toward 5G communication networks and devices to reach better performance with exponentially higher data speeds and greater reliability. However, these systems require the right combination of hardware, signal and software compatibility to work, and operating standards vary depending on the environment and the required transmission speed.
With these variables in play, global telecom, defense, and critical infrastructure organizations are in the process of thoroughly testing the functionality of this new technology on their particular systems in the appropriate operating environment before deploying 5G.
The fifth-generation technology standard for telecommunications is here, and it is already being tested and deployed in locations worldwide. This informative webinar will provide updates on the testing and implementation of 5G infrastructures, highlighting use cases in automotive and other mission-critical applications.
Panelists will discuss key factors for the successful implementation of 5G, the testing requirements needed to ensure consistent operations, and resilient positioning, navigation and timing (PNT) technologies that can help ensure accurate, continuous operations for critical applications during interference or signal loss.
What: Orolia Presents: GPS World Webinar, “Resilient PNT for a 5G World” When: May 20 at 1 p.m. EDT Where: Online, Register here
Confirmed panelists:
Lisa Perdue, Product Line Director, Simulation, Orolia
The European Space Agency has selected GMV to supply the radio-frequency constellation simulator (RFCS) for the Galileo second generation (G2G) program.
According to GMV, this is the multinational’s largest contract in Portugal.
From Portugal, GMV will lead a consortium to supply an RFCS covering both the first and second Galileo generations. The Galileo first generation (G1G), running since December 2016, consists of space infrastructure (26 satellites to date) and ground infrastructure.
Under the G2G RFCS contract, GMV teams in Portugal and Spain — partnering with Orolia and Tecobit — will develop an RFCS covering both Galileo generations as well as Galileo Open Service and Public Regulated Service (PRS). The RFCS will simulate the progressive deployment of the G2G with its new signals and will be key to supporting development of G2G infrastructure and testing of experimental user receivers.
The G2G aims to phase in new services, improve existing services, and boost system robustness. It also will enhance security while cutting operating and maintenance costs.
The RFCS will cover user characteristics such as dynamic behavior, signal impairments such as multipath and interference but also solution hybridization (for example, inertial sensors) and signal distortions. It will be designed to guarantee flexibility, configurability, modularity and scalability, as well as segregation of need-to-know information. For this purpose, the RFCS will be built with consumer-off-the-shelf products and follow a software-defined radio approach.
The project is closely linked with other PRS activities within GMV, identified as strategic for the maintenance of GMV’s European leadership position in the Galileo program.