By Pere Molina, Ismael Colomina, Markus Troger, Bernhard Hofmann-Wellenhof, and Carmen Aguilera
A pocket tracker for elderly people and Alzheimer’s patients consists of a smartphone using GNSS, WLAN, RFID, and GSM for basic positioning, communication channels, and an accelerometer triad for collapse and motion detection. It seeks to determine not only the quantitative where but the qualitative how: has the user lost balance, fallen, or ceased moving?
Accidents involving senior citizens and handicapped people have increased dramatically over recent years. Elderly people, especially those with Alzheimer’s disease, often get in situations where they need assistance due to disorientation or after a physical collapse. The Infrastructure Augmented Galileo/GNSS Receiver for Personal Mobility (IEGLO) project incorporates seamless indoor and outdoor positioning and emergency call services for healthcare applications.
Positioning is very important in such applications, but this target group has another key requirement: 30 percent of elderly people fall at least once per year. Furthermore, falls are responsible for 70 percent of accidental deaths in persons more than 75 years old. 71 percent of falls had physical consequences: 7.7 percent caused broken bones, and 21.7 percent needed medical aid. Moreover, 64 percent of fallers feared of falling again.
IEGLO seeks to establish automatic and reliable fall detection, through a personal device that can indicate a loss of balance of the carrier. This navigation enhancement — traditional orientation plus information about the personal behavior — has been called qualitative motion analysis (QMA).
System Overview
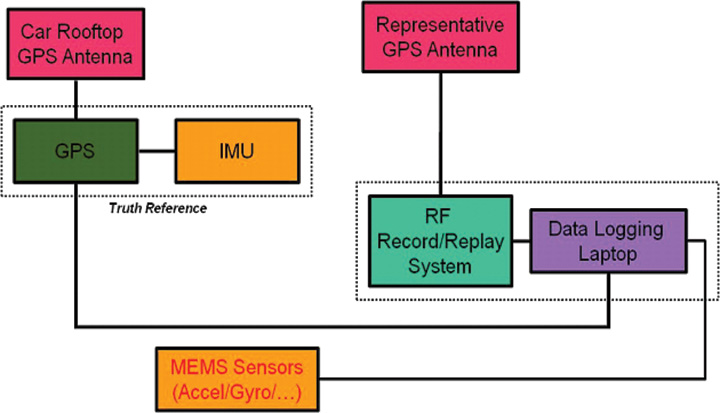
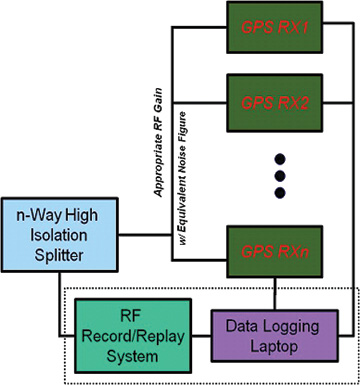
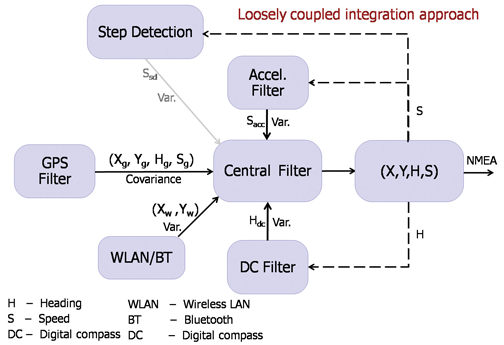
The IEGLO system concept, shown in Figure 1, consists of three parts: a mobile unit with an external sensor unit; a communication gateway/positioning server (CG/PS), and a service center.
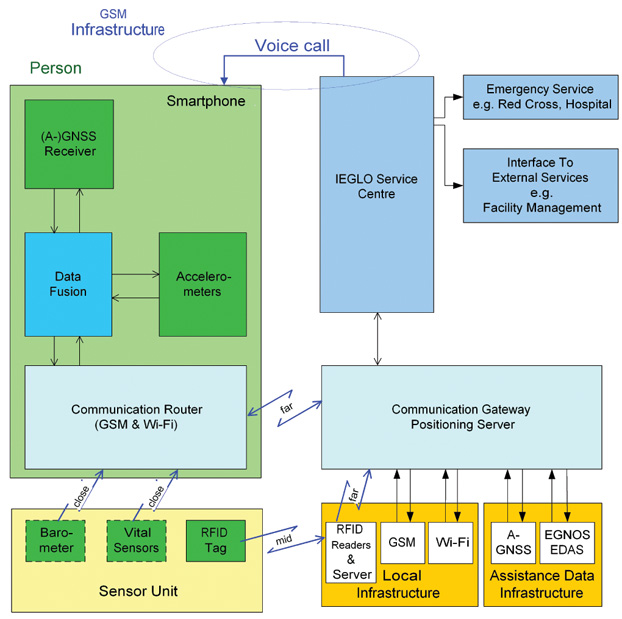
A commercial-off-the-shelf smartphone with integrated sensors and an RFID transponder represent the components of the mobile unit located at the monitored person. The mobile device cannot be fixed to the body in an precise initial attitude, but must move along with the person in order to capture his/her movements. Distress situations are detectable and alert messages can be generated manually or automatically at the mobile unit.
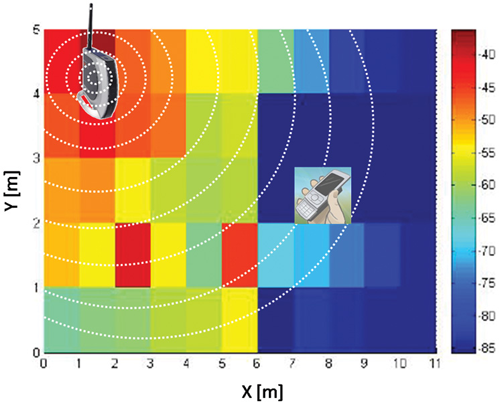
The mobile unit includes a GPS receiver able to process assisted-GPS data. A Wi-Fi adapter provides additinal communication when Wi-Fi access points are available, or if a determined access point is self-monitored. However, the main communication function in the mobile unit is provided by the GSM module. Both Wi-Fi adapter and GSM module, are also used for positioning purposes. An orthogonal accelerometer triad is integrated in the device and provides accelerometer measurements. For near-field communication, a Bluetooth interface is available. Through it, other sensors such as barometers or vital-signs sensors could be polled.
The RFID transponder forms together with the smartphone the mobile unit. RFID information including the transponder ID is sent to an RFID reader when the person passes by an RFID gate. Several pieces of RFID data are gathered on an RFID server, which sends the information necessary for positioning to the CG/PS.
The CG/PS is responsible for the position calculation. Through a TCP/IP interface, it recieves sensor data from the mobile device and processes it with additional reference information from Wi-Fi, GSM, and RFID positioning. A filter/fusion module calculates one integrated IEGLO position from the different determined positions. That position, together with quality information, is transmitted to the service center. The CG/PS also instantly forwards alarm and status messages from the mobile device to the service center.
The service center forms the interface between IEGLO operator and users. It stores databases of position information and personal information. The geo-database contains all information about the positions of the monitored person. The personal database contains user information, emergency contacts, and nursing staff.
The user interface at the service center is Internet-based. A standard desktop PC with web browser relays alarm messages from the different mobile devices and manages user data and nursing staff information. In cases of alarm, the event is instantly displayed via the user interface. Information such as body behavior, position, and location of the user are visualized for the operator, who can then start the alarm chain, which includes as a first measure contacting the mobile user. As further measures, emergency services can be contacted and guided to the person in distress.
Quantitative and Qualitative Nav
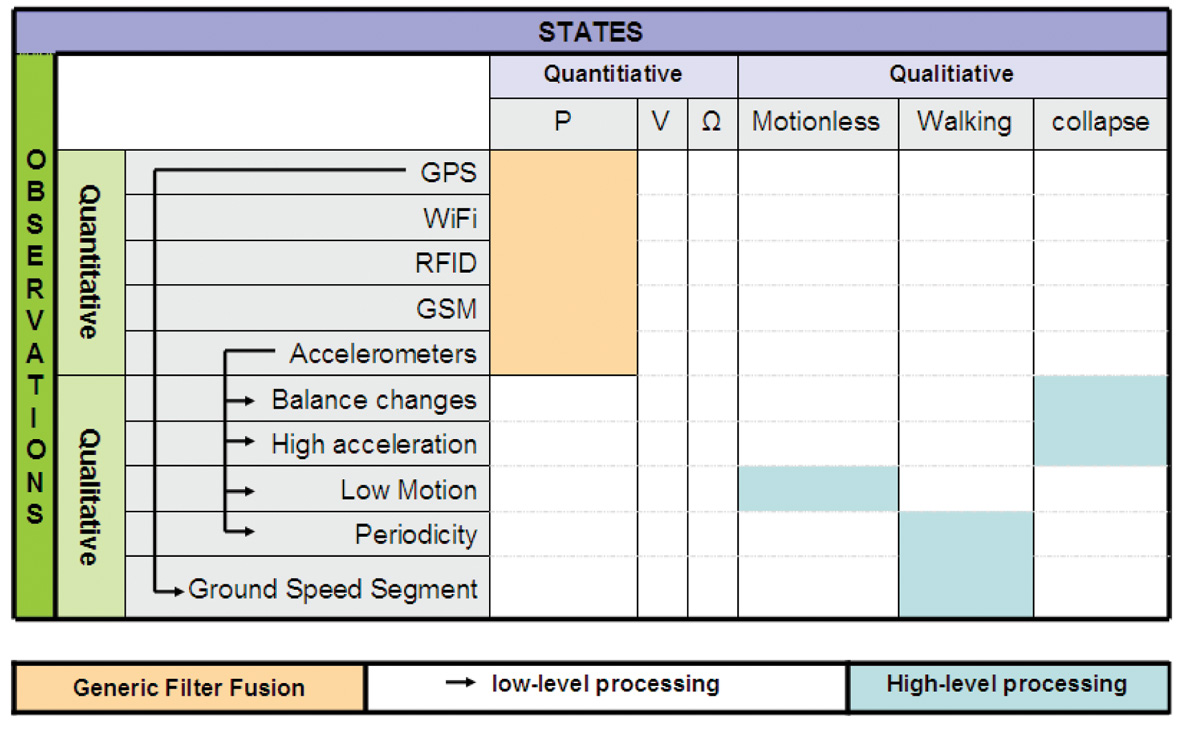
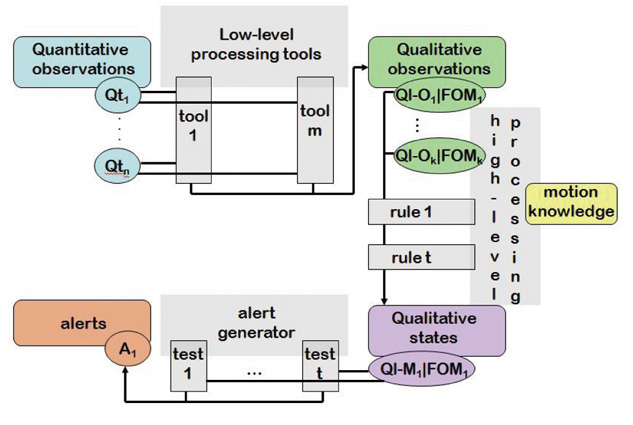
In this article, non-conventional INS/GNSS integration refers to classical, or quantitative navigation, combined with what we have named qualitative navigation. Roughly speaking, quantitative navigation provides the where, while quantitative navigation furnishes the how. Qualitative navigation was a key requirement for IEGLO, as the patient’s primary information of interest is her or his safety status. Figure 2 summarizes the relationships between quantitative and qualitative observations.
Any type of navigation, particularly quantitative navigation, is characterized by a navigation space. For example, in INS/GNSS navigation the navigation space N or state space is P × V × Ω (the set of position, velocity and attitude vectors) and the navigation function
T → P×V×Ω
t → (p,v,ω)
maps the time t into a particular navigation state (p(t),v(t),ω(t)). Typically,
T ⊂ R, P = R3, V = R3 and Ω = [0,2π]3. It is well known that there are various choices for the navigation space, from the simple point navigation where N = P to the complex N = P × V × Ω × B, where B includes time-dependent calibration and other ancillary states.
Qualitative navigation differs from classical quantitative navigation in the navigation space and, clearly, in the navigation function T → N. To illustrate the idea, let us compare and describe the classical quantitative navigation space P × V × Ω with one possible P′ ×V′ × Ω′ qualitative navigation space. While for quantitative navigation we have
t ∈ T ⊂ R,
p = (x,y,z) ∈ P ⊂ R3
v = (vx , vy , vz) ∈ V ⊂ R3
ω = (ωx, ωy, ωz) ∈ Ω = [0,2π]3,
for qualitative navigation we might have
t ∈ T ⊂ R,
p′ ∈ P′ = {hospital, home, park}
v′ ∈ V′ = {not moving, walking, running}
ω′ ∈ Ω′ = {standing, lying, sitting}.
Quantitative navigation is not just about providing estimations of the navigation states; the stochastic figures describing the precision of the estimated states are also provided. Thus, quantitative and qualitative navigation spaces are extended in dimension to include the precision space component, namely ΣP ×V ×Ω and ΣP ×V ′ ×Ω′ .
Navigation theory claims that navigation states might be estimated from observations through the appropriate dynamic and static models (differential and ordinary stochastic equations). Such a statement applies for both proposed navigation approaches, quantitative and qualitative. Thus, the relation model-observation-parameter can be written as l → h(l, X ) for the quantitative case, where:
- the quantitative observations l are usually obtained by performing the navigation sensor measurements (INS, GNSS, and so on).
- X ∈ P × V × Ω × ΣP×V×Ω
- h represents the model that relates l with X (INS mechanization equations, GNSS position models, and so on)
and for the qualitative case, the relation can be written as f → q(f,M), where:
- the qualitative observations f are obtained from quantitative observations by performing low-level processing.
- M ∈ P′ × V′ × Ω′ × ΣP′×V′×Ω′
- q represents the model that relates f with M, based on high-level processing.
In the IEGLO project, this theoretical approach has been materialized by defining the appropriate quantitative and qualitative observation and navigation spaces.
Quantitative Navigation
Quantitative navigation in IEGLO is based on positioning; thus, no quantitative velocity or attitude determination is performed. This leads to a very specific navigation space:
t ∈ T ⊂ R
p = (x,y,z) ∈ P ⊂ R3,
IEGLO uses different positioning technologies for indoor and outdoor positioning; GPS serves as the main positioning method outdoors, while Wi-Fi and RFID are used primarily for indoor positioning.
A GPS position augmentation service has been developed to augment GPS-only position solutions using European Geostationary Navigation Overlay Service (EGNOS) information acquired via the local area network and the Internet. The augmentation service is useful for receivers which are not capable of processing EGNOS data, but also for receivers which cannot receive EGNOS signals due to signal shadowing by urban canyons or the like. In this case, the GPS-only position is transmitted to the augmentation server, which corrects the position solution and retransmits the EGNOS Data Access System/signal-in-space through the Internet (EDAS/SiSNeT)corrected position. Figure 3 shows the functional modules of the augmentation server. EDAS provides access to the wide-area differential correction of EGNOS. SiSNeT is a free service that provides EGNOS widea-rea differential corrections and integrity information over the Internet.
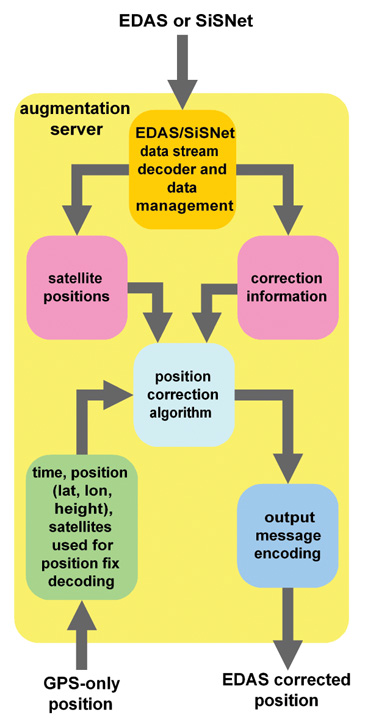
The augmentation server accesses EGNOS information from EDAS or SiSNeT, decodes the data, and stores it in a database. As a backup solution, if EDAS cannot be accessed, the augmentation server can also interface to an EGNOS receiver to decode the EGNOS signal in space. The augmentation server is provided with ephemeris and ionospheric information from EDAS/SiSNeT. The GPS position is received from the correction requesting unit together with its time and used satellites. It is corrected at the augmentation server and retransmitted back to the requesting unit.
From the mobile device, sensor information is transmitted to the CG. The sensor data is processed into positioning messages with additional reference information for Wi-Fi, RFID, and GSM positioning. A generic filter method determines a reliable IEGLO position from the different determined positions, which is transmitted to the service center together with the accuracy and time information. The choice of the position depends on its accuracy and its age.
Qualitative Navigation
Positioning is, indeed, the main navigation component in IEGLO. A main goal of the project is to be able to contact a person in case of an emergency anytime, anywhere, and thus position is sufficient. But beyond this sufficiency, a broader navigation concept can be developed using two of the available sensors in the IEGLO system: the GPS receiver and the 3-axial accelerometer. As described earlier, these two sensor measurements (quantitative observations) would yield some motion features of the person (qualitative observations) with which to estimate the motion context of the person (qualitative states). This is a two-step processing: low-level and high-level.
Low-Level Processing: from quantitative to qualitative observations. As depicted in Figure 2, the qualitative observations used in IEGLO are: ground speed segment, balance changes, high accelerations, low motion, and periodicity. These qualitative observations are low-level processed in two steps. First, robust and non-robust statistical estimators (based in order statistics like the median, median absolute deviation normalized (MADN), α-trimmed mean and deviation, or least-squares like the mean, standard deviation, respectively), and deterministic analyzers (such as the fast Fourier transform (FFT), velocity transformation (VT), equidistant maxima search (EMS) are applied to estimate some intermediate values, like the first and second statistical moments, maximum and minimum values, and FFTs. Secondly, these intermediate quantities are evaluated using propositional calculus to decide if a situation is finally detected. All the qualitative observations’ extraction in IEGLO are described as follows.
On one hand, GPS positions are used to compute the ground speed segments of the device. That is, given a sample of GPS positions P = {(ti , pi )}Ni=1 , the ground speed sample is extracted through a finite difference-based technique called velocity transformation (VT). Thus, a speed sample S = {(ti, si = ||pi − pi-1||ground)}Ni=2 is obtained. In addition, this sample is statistically through robust and non-robust estimators yielding E(S) and, thus, deriving the person’s ground speed profile.
On the other hand, accelerometers are the key sensors to enable qualitative observation computation to later derive a qualitative attitude, that is, the detection of a collapse. Accelerations are involved in the computation of four types of qualitative observations, and its use is based on the following three statements:
- Independence of any initial attachment or placement of the device on the body is fundamental to ensure a loose and easy start-up of the device.
- Independence of any sensor error-calibration should not be an issue.
- Balance is the key observable to perform collapse detection.
First, balance changes are extracted from accelerometers as they sense the gravity vector projection on each axis, and any change on these projections is interpreted as balancing the device. Indeed, balance is not exactly attitude: the gravity vector defines a normal plane, called equilibrium plane, which is a 2-degree-of-freedom object. Nevertheless, the left degree-of-freedom not sensed in this approach corresponds to the heading changes, which do not contribute to collapse situations. Therefore, given a 3-axis acceleration sample AN = {(ti , aix , ai sup>y , aiz)}Ni=1, an analysis is performed using robust and non-robust statistical estimators, as monitoring the first and second statistical moments of this sample enables detection of variations on the gravity distribution among the axes. Finally, thresholding is performed on the propositional calculus to obtain balance change extraction.
Second, given an acceleration sample AN , high accelerations are extracted using the distance operator di = || ai − E {AN} || and a threshold-based propositional calculation.
Third, accelerations are also used for low-motion detection. Given an acceleration sample, AN, first and second moments of the acceleration norm sample (E( || AN || )) and V ar(AN ) = E(( || AN || − E( || AN || ))2)) are computed and evaluated through threshold-based propositional calculations to detect norm-wise low-acceleration profiles.
Finally, accelerations are the key observations to perform periodicity detection. Given a set of accelerations AN, two deterministic analyzers are used to extract periodicity patterns: EMS and FFT. The first technique enables computing j local maximum values, one for each sub-sample ANj, j = 1…m, where AN = Umj=1 ANj. Evaluating the j local maximum values interdistance along time against some thresholds enables periodicity detection. The FFT analysis complements the periodicity detection achieved by the EMS technique.
In addition to the extraction itself, a figure of merit (FOM) is computed for each qualitative observation. Consisting of a rational number between 0 and 1, it is an empirical magnitude describing how many extractions have been done for a certain observation in relation to the maximum possible amount of extractions. This figure enables a reliability computation similar to a discrete probability function. Nevertheless, at this stage of development we do not claim completeness and therefore do not state that FOM computation is a discrete probability function.
High-Level Processing: from qualitative observations to qualitative states. So far, one may think that the navigation requirements are already fulfilled: a person can be localized, in a seamless indoor and outdoor way, and thus can be feasibly reached if needed. But IEGLO seeks to enhance this navigation concept to provide contextual information about the person, and eventually activate automatic warning messages in case of undesired motion behavior. To do this, the qualitative navigation concept has been developed by analogy of the quantitative navigation: [qualitative or quantitative] observations are used to estimate [qualitative or quantitative] states.
The qualitative states in IEGLO are:
t ∈ R
V′ ∈ {motionless, walking}
Ω′ ∈ {collapse}
This particular choice of the navigation state is fully driven by the user requirements. With the estimation of the collapse and motionless states, IEGLO can provide the user with an automatic distress detection system. These two states specially represent the type of undesired behaviors that IEGLO seeks to detect and respond to. In addition to the distress states, walking is useful to support the pedestrian navigation concept, which is based on single point navigation.
As can be seen in Figure 2,
- collapse estimation is performed by means of the balance change and high-acceleration qualitative observations
- motionless estimation is performed by means of the low-motion qualitative observation
- walking estimation is performed by means of the ground-speed segment and periodicity qualitative observations
In all cases, the weighted combination of the qualitative observation FOMs is performed to determine the qualitative state FOM, as a degree of truth. The role of the FOMs is crucial when generating automatic alarms in case of eventual distress situations. The more accurate the FOM, the fewer false alarms are generated.
Note that in this high-level processing approach, every model q(f,M) must be fed by values that are external to the process. These values help to fine-tune the adjustment of the model to the user carrying the device. In pedestrian navigation, values like step strength and time-to-step play a role in the walking model and fully depend on the individual’s way of walking. In IEGLO, the knowledge of the individual user is a key piece to properly perform qualitative-state estimation. The IEGLO approach is implemented architecturally to allow to input and removal of data about a specific individual’s motion habits. Figure 4 depicts the architecture of the kinesic behavior detection (KBD) module, the software platform where these qualitative navigation concepts have been implemented.
Position Augmentation Tes
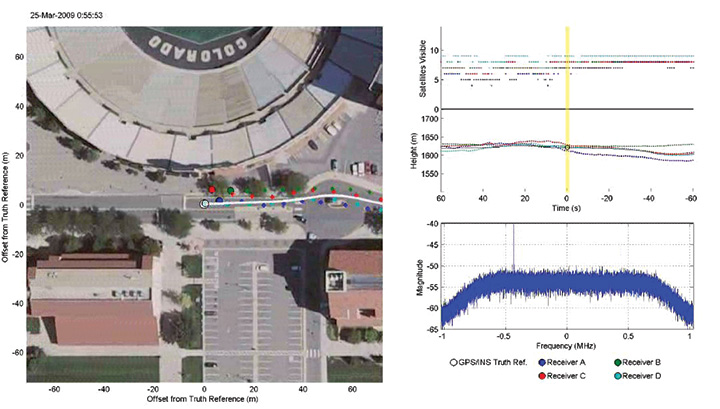
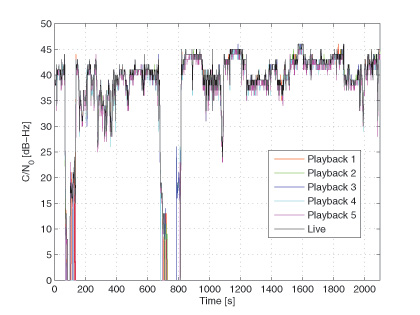
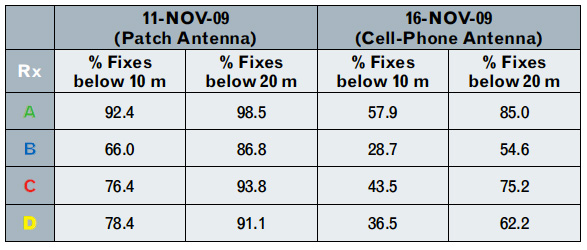
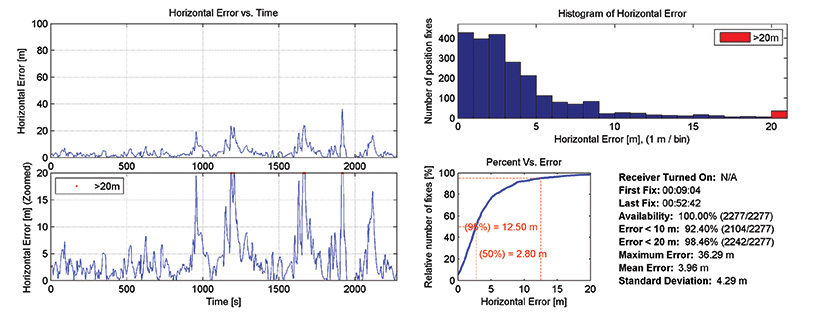
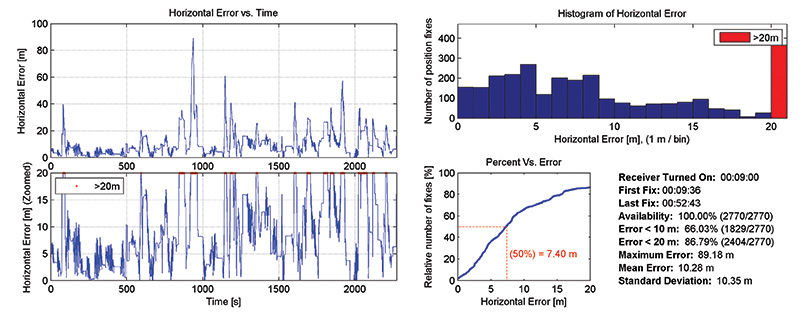
To test the augmentation service, a test user terminal (TUT) has been specified and assembled. The TUT uses two identical GPS/EGNOS receivers, interfaces directly with the augmentation server, and processes the position response. One receiver has been configured to output GPS-only position information, the other to use EGNOS corrections for the position computation. The position of the GPS-only receiver was forwarded to the augmentation server. The EDAS/SiSNeT corrected position information was routed to the EDAS file database. In this manner, three different calculated positions of one point per epoch are available: GPS-only, GPS/EGNOS, and GPS/EDAS/SiSNeT (see Figure 5).
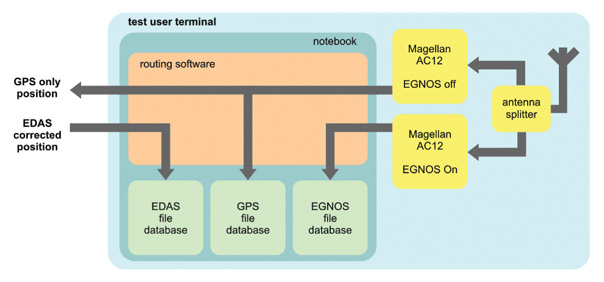
A low-cost patch antenna providing single-frequency (L1) output was used for the tests, connected to an antenna splitter. A notebook computer provided an interface to a GSM/GPRS module and to the receivers.
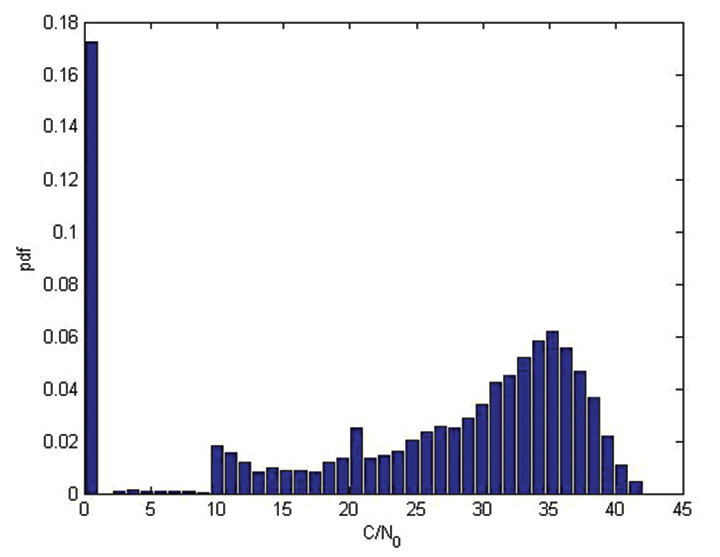
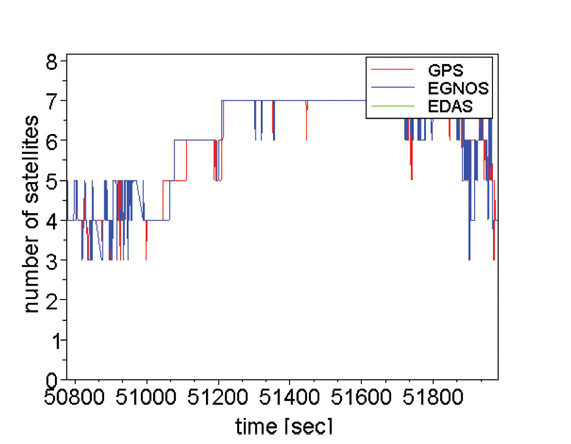
An April 2010 test was conducted in the area surrounding an assisted living home. Figure 6 shows the number of satellites used for positioning during the measurement campaign. The area around the building was very hilly, so satellite signals were exposed to shadowing effects at the beginning and at the end of the measurements. The middle of the campaign had good satellite visibility.
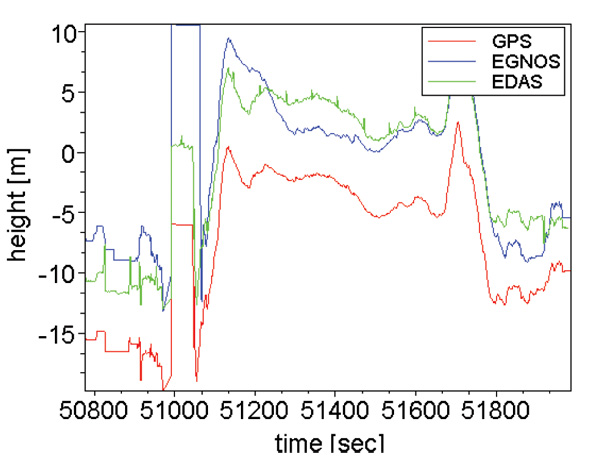
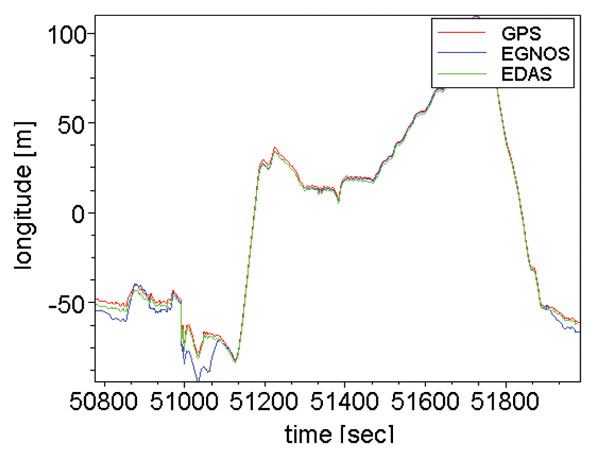
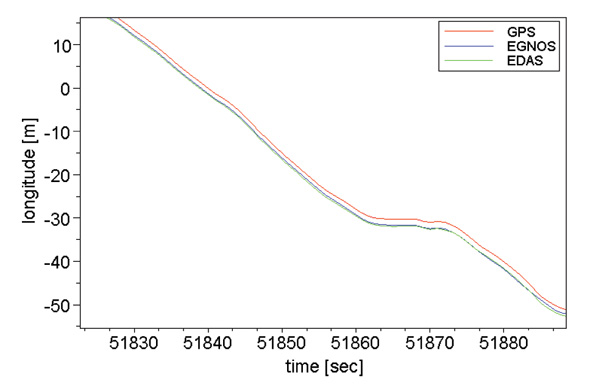
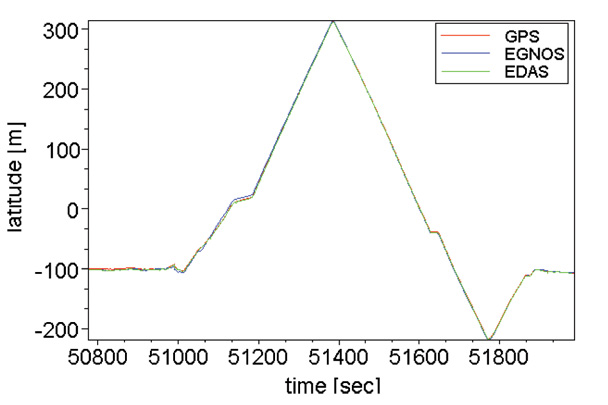
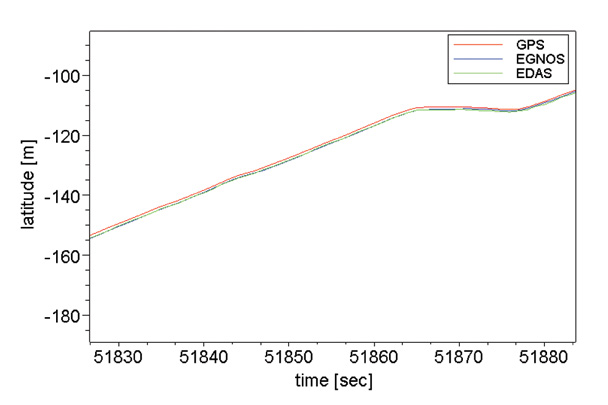
Figures 7–11 show the user trajectory during the dynamic measurement. For better readability, longitude, latitude, and height values were reduced by the mean value of the corresponding coordinate. Therefore, the zero line in the y-axis of each plot symbolizes the mean value of the whole measurement. The same configuration is used for the five plots.
Figure 7 demonstrates the good performance of the augmentation server concept regarding the height solution. The ionospheric delay, which can be corrected with the EGNOS signal, particularly influences the height component of the position. Thus, the potential of the EDAS/SiSNeT-based correction is seen in the height plot.
Figures 8 to 11 show the longitude and the latitude of the different solutions. Two plots of each coordinate were used: the first one shows the coordinates during the whole measurement, and the second one emphasizes the time interval between second 51820 and second 51890. Here, the EGNOS and EDAS/SiSNeT solution are very similar. In some other parts of the measurement, the EDAS/SiSNeT solution is closer to the GPS-only solution.
Note that during the whole test, the EDAS/SiSNeT solution was determinable, meaning that even during blockage of the EGNOS signal-in-space, a position augmentation was possible. However, the quality of position augmentation always depends on the quality of the GPS-only position. The test shows a diverse image of the performance of the augmentation server.
- The functionality of the augmentation server could be shown.
- All positions transmitted to the augmentation server have been processed and transmitted back in corrected form.
- Some measurements clearly show the benefit of position correction of the augmentation server, where the EDAS/SiSNeT solution tends to the EGNOS solution
- Some measurements show a better height solution than the GPS solution (Figure 7).
- The quality of the augmented position strongly depends on the quality of the GPS-only position.
- Any receiver only capable of processing GPS but not of EGNOS would benefit from the augmentation server concept.
Collapse, Motionless, Walking Tests
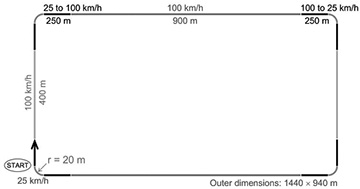
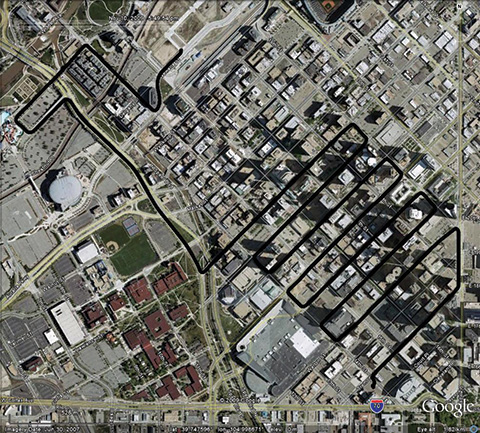
To validate the proposed qualitative navigation approach proposed, a test pattern was specially designed to test the KBD module for two different purposes. On one hand, and by definition, the test pattern should represent all the situations in which detection must be tested, that is, the defined qualitative states: collapse, motionless, and walking. At the same time, the test design should provide means to prove the KBD module resilient against these issues:
False alarms: Users of similar systems have stated that false-alarm generation is the key problem of automatic-detection-based systems of any kind. False alarms are generated when a situation is misunderstood and treated as a undesired situation, causing the system to generate an alarm. In the IEGLO case, some situations such as sitting, walking up or down stairs, or picking up the phone are, motion-wise, similar to the collapse situation. Therefore, the test design includes sitting and picking up the phone, to assess KBD module robustness against false alarms.
Initial Attitude. Many pedestrian navigation systems are constrained by the initial placement and/or attachment to the user. Some systems integrates gyroscopes, and therefore their initial attitude with respect to a person-relative frame needs to be known quite precisely. Other systems based on step detection and gait analysis rely on foot-mounted or hip-mounted accelerometers. The IEGLO approach, driven by the user needs of elderly people and Alzheimer’s patients, cannot assume such constraints. An inconspicuous, yet at the same time, familiar system is desired, and no specific initial attitude is required. Therefore, carrying the phone in a pocket (which turns out to be a preferred placement) shall be sufficient, and its actual initial attitude shall not be relevant.
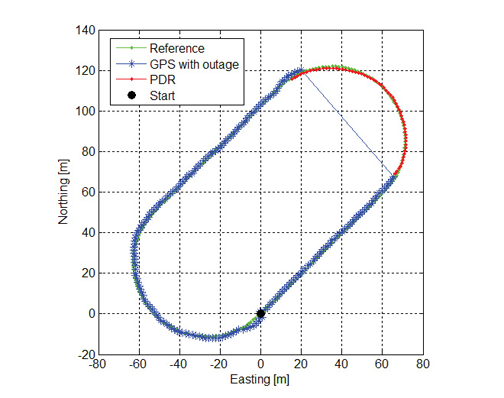
The test design shown in Figure 12 therefore consists of walking to Point 2, where a collapse situation and a motionless period lying on the floor are performed. After standing up, those actions are duplicated to reach Point 3. There, after standing up, the phone is taken out of the pocket and replaced upside down with respect to the previous attitude. The sequence is repeated to return to the start. Finally, the design leads to Point 5, where a sitting action is performed. After standing up, the end point is reached, and the phone is taken out of the pocket.
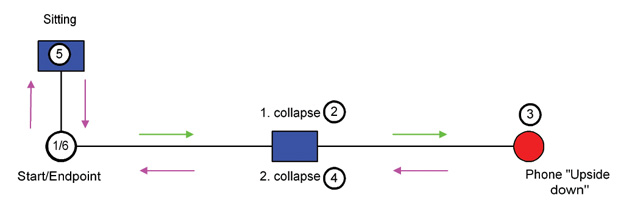
Data was collected on four tests. Basically, the inputs of the IEGLO KBD module show that the GPS trajectories are quite discontinuous and different among them. Different visibility conditions, eventual multipath, low-cost receiver performance, and phone position in the pocket are just some examples of causes for the GPS trajectories’ discontinuities. But in any case, these are the conditions that pertain in real use, and therefore draw a very realistic test frame.
Estimation of Qualitative States. Each data acquisition is composed of 16 different possible qualitative states: two collapses, four motionless periods, five walking periods, and five other misleading situations (sitting, taking the phone out of the pocket).
The KBD module estimates the collapse and motionless states perfectly; that is, there were no missed detections (thus no risk on the user’s side) and no false alarms (no risk on the system side) were generated during the execution of the KBD module in the four tests.
For walking detection, two modalities were tested: the accelerometer-only detection and the combined accelerometer/GPS combination. The first mode used qualitative observations only, derived from accelerations, and the second mode used qualitative observations derived from both accelerations and GPS positions. In the first mode, 66 percent of the walking time was properly detected, with 2 percent of false alarms, and 32 percent of missed detections. The acceleration-only approach seemed to work well in very evident walking situations, but at the start or end of walking action, when there is a increase or decrease of motion, the approach was not able to capture a proper walking situation. Nevertheless, when GPS-based observations were used, the results improved up to 80 percent, and missed detections were reduced to 18 percent. Note that the walking state was the only non-distress situation. Therefore, missed detections in that case were definitely not critical for personal safety.
Conclusions and Next Steps
IEGLO uses GNSS technology as the main positioning method in caregiving applications. As healthcare assistance is not a core GNSS application, this potentially expands GNSS adoption.
The combination of indoor/outdoor location technologies using mass-market off-the-shelf devices was the key innovation of the project. Different localization methods were used to obtain a reliable user position.
During the project phase, the position augmentation server was used to enhance the GNSS positions on the server side. If signal blockages occurs or if the mobile units are not able to receive and process the EGNOS signal-in-space, position corrections can be still accomplished. Tests showed that augmented positions provide higher accuracies in the majority of measurements, particularly in the vertical dimension.
With respect to qualitative navigation, the KBD module enhances the navigation domain to gauge user context in addition to user position. Some qualitative states were selected for the KBD as of particular interest for u
ser requirements: collapse, motionless, and walking situations. Results show nearly perfect detection of the first two qualitative states and an 80-percent correct detection of the third.
Further research on qualitative navigation should address the personal signature issue: it is of the utmost importance to determine the biometric characteristics of each user. Customizing the KBD for each user, can provide a deeper analysis of user motion and behavior, such as fatigue, leading to proactive prevention of distress situations.
We may also anticipate GPS receiver improvements in smartphones, as navigation technology gets cheaper, smaller, and better. Potential improvements in walking detection may thus occur through reduction in the number of missed detections. Finally, it is of great interest to investigate other scenarios in which the KBD makes sense: indeed, motion analysis is of interest for many applications such as videogames and personal safety. User requirements must be gathered to contextualize such concepts and to determine KBD software modularity and extendibility.
Acknowledgments
This research received funding from the European Community’s Seventh Framework Programme (FP7/2007-2013) under grant agreement n226971.
The authors thank all IEGLO consortium partners (OECON GmbH, Germany; PIAP, Poland; Tele+ Italia S.A.S, Italy) for their contributions, and a special mention to M. Eulàlia Parés for her work on the qualitative navigation concept and general support.
Manufacturers
The Magellan AC12 served as the GPS/EGNOS receiver in the tests.
Pere Molina is a research assistant at the Institute of Geomatics in Barcelona, where he obtained an MSc in airborne photogrammetry and remote sensing.
Ismael Colomina is the director of the Institute of Geomatics. He holds a PhD in mathematics from the University of Barcelona and is a mem-ber of the Editorial Advisory Board of GPS World.
Markus Troger works for TeleConsult Austria GmbH as system engineer and project manager in positioning and navigation. He received a master’s degree in geomatics science from Graz University of Technology, Austria.
Bernhard Hofmann-Wellenhof received his Dipl.- Ing. and doctoral degree from Graz University of Technology, where he is a professor of navigation and satellite geodesy. He is a founder and managing director of TeleConsult Austria GmbH.
Carmen Aguilera is market development officer at the European GNSS Supervisory Authority. She holds a masters degree in telecommunication sciences.



 Chadha Says. “From a strategy viewpoint,” SiRF founder and vice president of marketing Kanwar Chadha told GPS World, “multi-function radios is something we have been talking about for two years. Market opportunities became much larger in the last six months, with Nokia driving loction into every mobile phone.
Chadha Says. “From a strategy viewpoint,” SiRF founder and vice president of marketing Kanwar Chadha told GPS World, “multi-function radios is something we have been talking about for two years. Market opportunities became much larger in the last six months, with Nokia driving loction into every mobile phone.
 Epson, Infineon Develop Tiny Single-Chip Receiver
Epson, Infineon Develop Tiny Single-Chip Receiver u-blox Launches Cards for Mobile Computers
u-blox Launches Cards for Mobile Computers