A new information portal for PNT and GNSS is now active. The European GNSS Center of Excellence (GNSS-COE) is designed to provide expertise to help development of critical PNT and GNSS applications.
“We support the development of applications both in the design definition phase, as well in the validation phase of these applications,” according to the site. Among the offerings are masterclasses, resilience assessment, mitigation methods, and a newsfeed.
The portal, a National GNSS Knowledge Center project, was funded under the European Space Agency’s NAVISP Element 3, which supports member states’ PNT initiatives and national strategies.
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
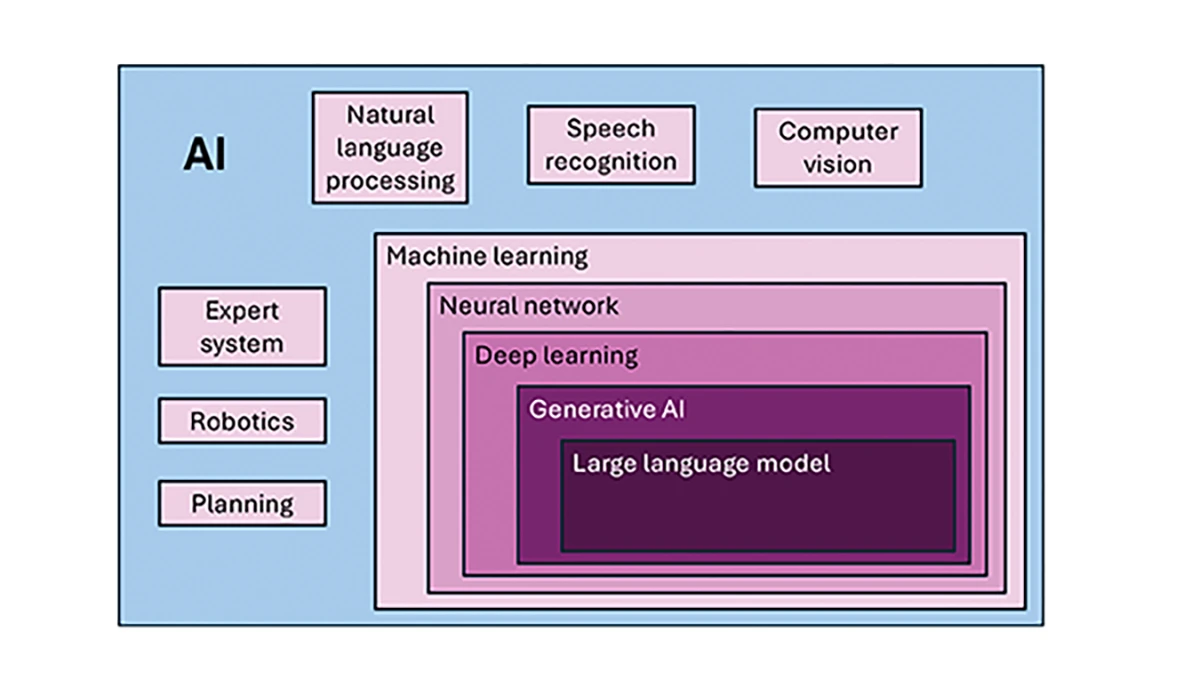
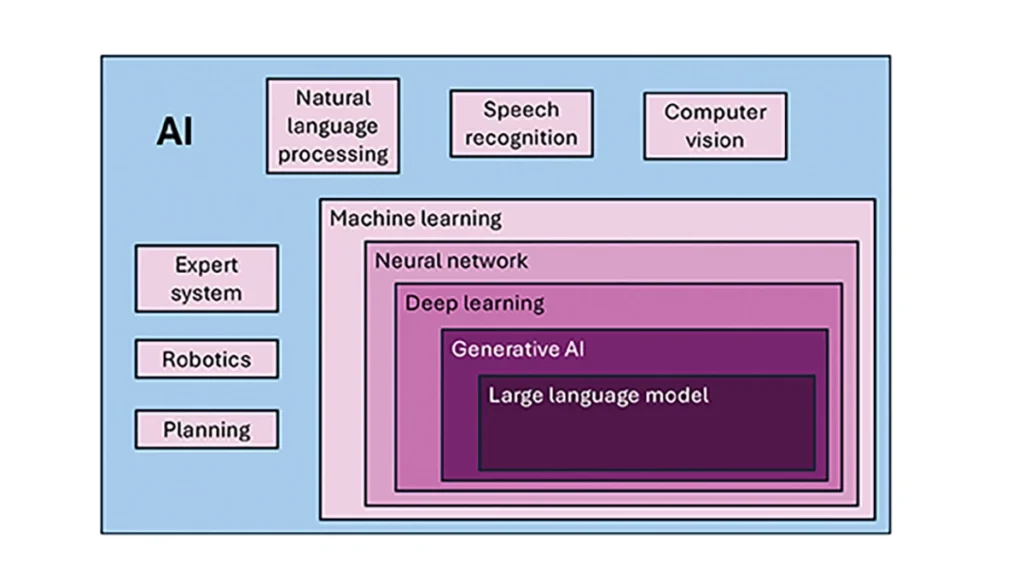
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
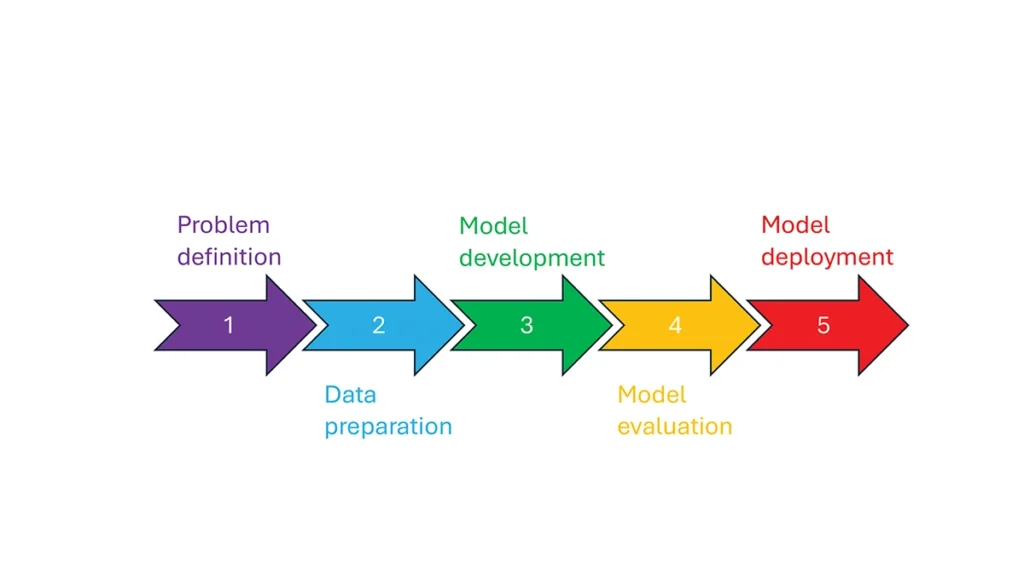
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
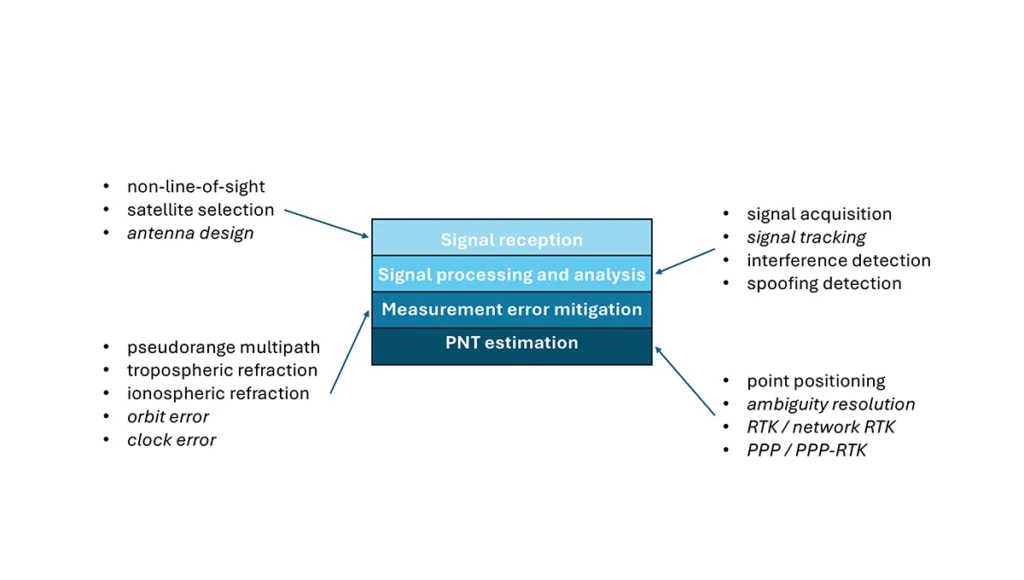
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
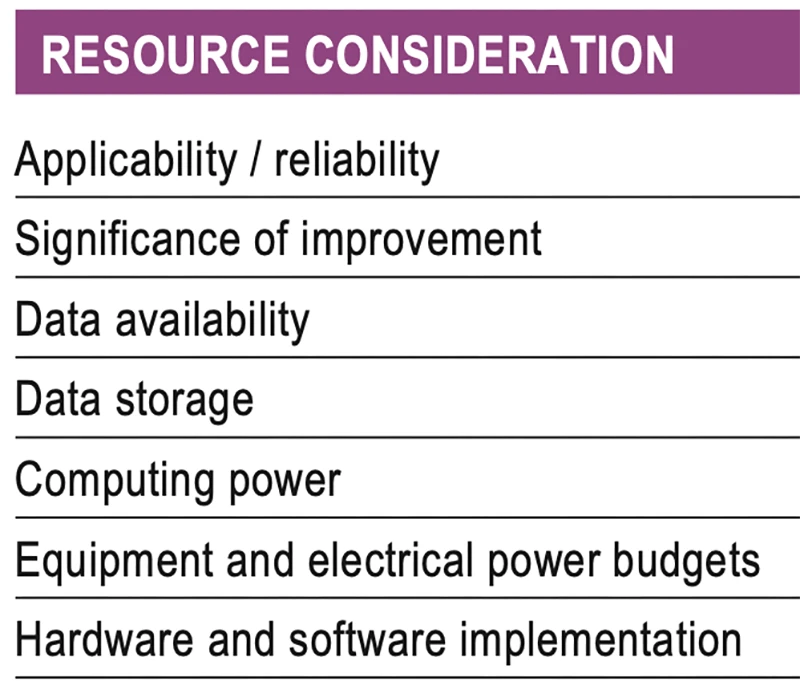
Machine learning resource considerations
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.
The fire at an electrical substation that shut down London’s Heathrow Airport, Europe’s busiest hub, for 18 hours on March 21 was one of many periodic reminders of the vulnerability of much of our critical infrastructure to a single point of failure (SPOF). A previous one was the CrowdStrike software bug that disrupted hospitals, airlines, banks and scores of other businesses and services around the world on July 19, 2024. Think of the impact on your home or business if the power went out for hours or days, and you did not have a backup generator and/or solar panels.
Our society’s and economy’s enormous reliance on global navigation satellite systems (GNSS) for positioning, navigation and timing (PNT) makes GNSS a huge SPOF. Hence repeated and urgent calls for increasing the resilience of GNSS and for developing complementary and/or alternative sources of PNT (or, to use the mantra of the National Space-Based Positioning, Navigation and Timing Advisory Board in recent years, to “protect, toughen and augment” GNSS).
Yet, at least two existing directives for strengthening PNT have not been implemented: The National Timing Resilience and Security Act of 2018 directed the U.S. Department of Transportation to ensure establishment of at least one terrestrial timing system as a backup for GPS signals, and President Trump’s January 2021 Space Policy Directive 7 ordered the entire U.S. government to “identify and implement … alternative sources of PNT for critical infrastructure, key resources and mission-essential functions.”
Awareness of the key importance and vulnerabilities of GNSS and of the urgent need to develop complementary and/or alternative technologies has reached the U.S. Federal Communications Commission (FCC). It dedicated its March 27 open meeting to hearing recommendations on “promoting the development of PNT technologies and solutions,” which it deems “crucial for national security, public safety and economic stability.”
The Notice of Inquiry (NOI) that the FCC issued in preparation for the meeting is a thorough and very useful compilation of relevant policies, programs, initiatives, reports and policy documents. I highly recommend reading it. Clearly, the commission did its homework — in the footnotes, it cited four GPS World articles among its sources — and demonstrated that it understands the key challenges for GNSS, the options for complementary/alternative systems and the relevant policy history. (See Dana Goward’s March 7 article on this at gpsworld.com/fcc-to-meet-on-gps-alternatives/) The NOI also posed 94 questions to which the FCC seeks answers.
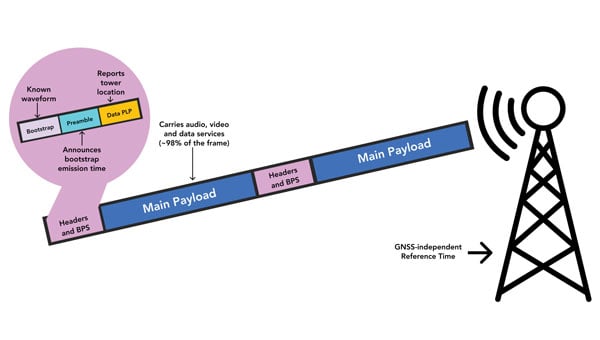
The FCC meeting, available on YouTube, was of great importance to the whole GNSS/PNT community. While the commissioners did not vote to support any existing or proposed PNT system, they engaged in a broad discussion of the issues and heard petitions from NextNav and the National Association of Broadcasters (NAB) related to the provision of nationwide PNT services. NextNav requested spectrum for its project to work with telecom providers. NAB sought to accelerate and mandate implementation of the new ATSC 3.0 television broadcast format, which includes signals for its Broadcast Positioning System.
More than 20 years ago, in these pages, we referred to television broadcast signals as “signals of opportunity” that might be used for positioning, navigation and timing (PNT). Since then, several other signals with a different primary purpose have also been considered as sources of PNT, and some have been used routinely for years now, such as WiFi routers for indoor navigation. On Feb. 26, 2025, the National Association of Broadcasters (NAB) filed a petition for rulemaking with the Federal Communications Commission (FCC) for television to transition to a new standard, ATSC 3.0, that enables what they call Broadcast Positioning System (BPS), as a way to enhance GPS resiliency. I asked NAB’s chief technology officer and executive vice president, Sam Matheny, to answer a few questions about the organization’s proposal. In next month’s issue, we will present a different perspective on it.
Question: Briefly, what is the history of the relevant standards?
Answer: The Advanced Television Systems Committee (ATSC) is an international standards development organization. ATSC developed ATSC 3.0 as the “next-gen” standard, and the International Telecommunications Union (ITU) adopted it as a recommended digital broadcast standard in 2020. Broadcasters in the United States began experimental ATSC 3.0 transmissions in 2016, and there are currently more than 100 transmitters broadcasting in 80 markets. Other nations currently using or considering ATSC 3.0 include Brazil, India, South Korea, Canada, Mexico, Jamaica and Trinidad and Tobago. NAB’s petition to the FCC requests permission to fully transition to ATSC 3.0 by 2030.
Q: Briefly, what is the history of the BPS project/proposal?
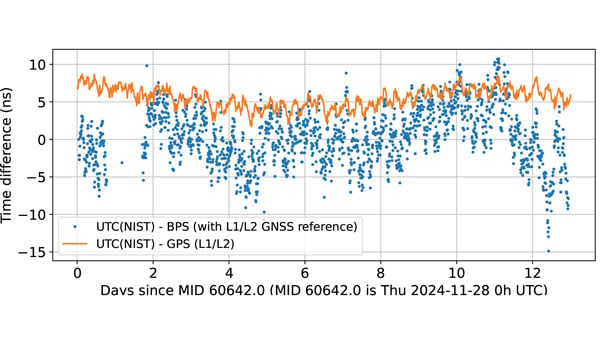
A: BPS is a datacast application that uses ATSC 3.0. We at NAB authored a seminal paper on BPS in 2021 and built our first prototype in 2022. We put our second prototype on the air in 2023. We signed a Cooperative Research and Development Agreement (CRADA) with the National Institute of Standards and Technology (NIST) in 2024 and published our first joint paper earlier this year. The paper concludes that “the stability of BPS time transfer is comparable to or better than GNSS, making BPS a viable complementary PNT solution when GNSS is unavailable.”
Our petition to the FCC highlights a transition to ATSC 3.0 that enables the nationwide deployment of BPS.
BPS time is comparable to dual band GPS (L1/L2) time. The data are recorded as 10-minute averages. (Graphic: National Association of Broadcasters)
Q: What is the motivation for broadcasters to implement BPS? What’s in it for them?
A: BPS will further secure television broadcasters’ role in the fabric of U.S. telecommunications. We also witnessed the innovation around GPS, with more than 7 billion GPS receivers being built into myriad devices. We’d like to see BPS experience similar innovation, which will bring new business opportunities. We believe that there is an opportunity for a public-private partnership with the government to deploy BPS for economic and national security.
Q: What have your tests so far shown regarding the timing accuracy of your signals? How much more R&D is required?
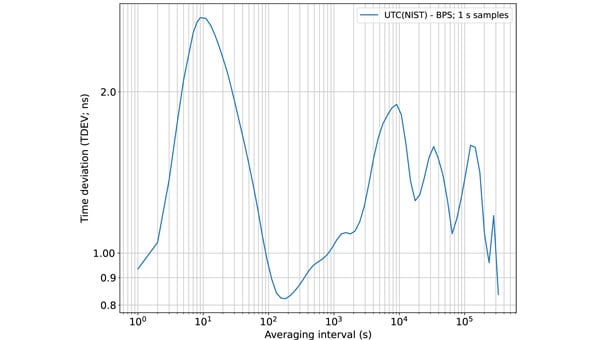
A: We’ve completed a wide variety of testing over the years, but probably of most interest is the work done with NIST. They ran common-view experiments using the BPS signal transmitted from KWGN, a TV station in Denver. Receivers were placed at two different facilities equipped with NIST timescale. Their Boulder facility is 30 km away with non-line-of-sight (NLOS) propagation, and their Fort Collins facility is 106 km away with line-of-sight propagation. A 21-day-long test showed that the time deviation (TDEV) statistics were better than 2 ns for all intervals. NIST also tested the stability of the NLOS signal alone at the Boulder facility and found that the TDEV statistics were better than 3 ns.
Q: How can BPS help improve GNSS resilience and integrity?
A: BPS functions completely independent of GNSS, so in the event of an acute GNSS disruption or catastrophic outage, BPS can be a resilient secondary source of timing for critical infrastructure (CI). Integrating BPS into CI applications also makes GPS a less attractive target for intentional disruption. Additionally, being independent means that BPS and GPS can work together in a hybrid mode, where, for example, BPS can help detect jamming and spoofing of GPS.
Time deviation (TDEV) statistics of BPS is less than 3 ns, even for the NLOS test scenario. (Graphic: National Association of Broadcasters))
Q: What are the main benefits of BPS?
A: The key benefits of BPS include:
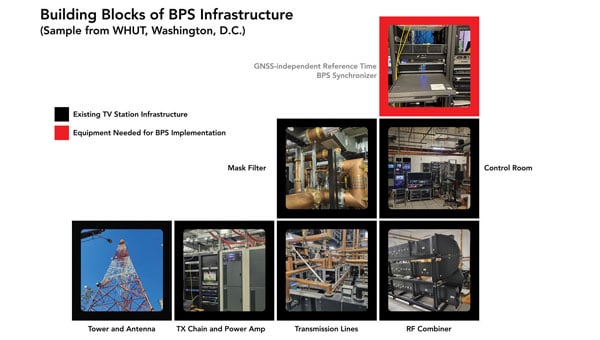
Existing infrastructure: BPS leverages existing television transmission infrastructure making it low cost and easy to deploy. There are more than 1,700 full power TV stations on the air today. These stations, considered critical infrastructure, are designed to stay on the air on a 24 x 7 x 365 basis, including during emergencies.
Nationwide coverage: Television transmissions are “high-power/high-tower” signals that provide nationwide coverage. Their broadcast power can be up to 1 MW and from towers up to 2,000 feet tall. The signals can be received NLOS, including indoors. The strength of these signals makes them difficult to jam or spoof.
Frequency diversity: Television in the United States operates on 210 MHz of licensed spectrum divided into 35 6-MHz channels. There are multiple stations/channels in each market, which offer geographic diversity along with frequency diversity.
Passive receivers: BPS is a broadcast service, just like GPS, and supports an unlimited number of simultaneous users with no bottlenecks or two-way connectivity dependencies.
Standards-based: BPS is based on ATSC 3.0, an ITU-recommended digital terrestrial broadcast standard with the support of a global community and supply chain.
Independent: BPS operates completely independent of GNSS and is a self-synchronizing network that does not rely on Internet or cellular connectivity.
BPS Installation at WHUT. TV transmission infrastructure is already built out. Only a BPS synchronizer and a reference timing source need to be added. (Graphic: National Association of Broadcasters))
Q: What are the main initial use cases? What are some additional ones that might come later?
A: The initial use case is providing resilient time to CI, which includes the power grid, cellular communications, and financial and data centers. A 2019 NIST study estimated the economic risk of losing GPS at $1 billion a day, and in 2024 a National Security Space Association study said the impact of a disruption or loss would be incalculable, so addressing this CI need is vital. Longer term, we see hybrid applications where BPS and GPS are used together. BPS can be leveraged for GPS health monitoring, which could be especially useful for transportation systems and can help identify and mitigate compromised GPS service. Going further, we see applications for positioning and navigation, plus other data services such as AGPS, GPS validation and RTK.
Q: How will the BPS service be monitored after full deployment?
A: NAB has developed a cloud-based network operations center (NOC) to monitor the health of the BPS-enabled TV stations. As part of our leader-follower construct, TV stations in the BPS mesh network measure each other’s emissions and send the data to the NOC, which can identify any issues.
Q: Which television manufacturers have expressed interest so far?
A: Hisense, LG, Panasonic, Samsung, Sony and TCL are already selling NEXTGEN TV sets. It is important to note that these televisions don’t use BPS. They ignore the BPS data and pay attention to the audio and video payload. The reverse is true for a BPS receiver; it ignores the audio and video and simply uses the BPS data. Both services rely on ATSC 3.0, but they use different parts of the signal.
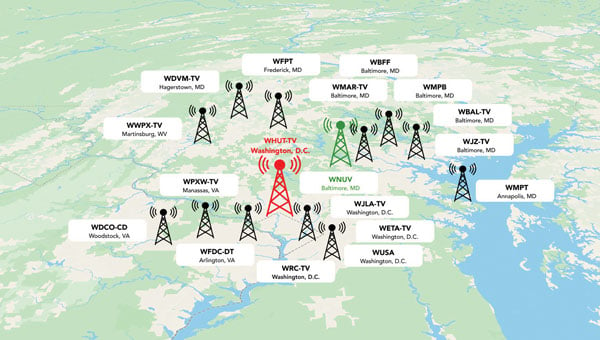
BPS leader-follower mesh network example. WHUT is configured as a leader tower, and WNUV is set up as a follower tower deriving traceable time from WHUT’s signal. At full deployment, the remaining 12 towers in the DC-Baltimore area can also follow WHUT. (Graphic: National Association of Broadcasters))
Q: Have you talked to any GNSS receiver manufacturers yet?
A: Yes, we have healthy interest from numerous receiver manufacturers. They see BPS as a nice addition to their product lineups. Conversations have focused on performance and integration.
Q: Are there any technical, commercial or legal arguments against BPS? Do you anticipate resistance to your proposal from any quarters?
A: We have not heard any such arguments against BPS. To the contrary, people have been intrigued and supportive of the concept. Recognizing that BPS requires transition to ATSC 3.0, some groups have expressed concerns over the television set upgrade cost for low-income viewers. However, ATSC 3.0 receiver accessories retail for less than $100 today, and prices will drop further with scale.
Q: How does your proposal address backward compatibility?
A: NAB’s petition calls for all television stations to transition to ATSC 3.0 and for all television sets to be equipped to receive ATSC 3.0. As mentioned earlier, millions of NEXTGEN TV sets are already being purchased, so our petition aligns with natural product replacement cycles, including low-cost converters for older TVs.
Q: What is your arrangement and division of labor with NIST?
A: Our CRADA with NIST also includes Nexstar, one of our members. Nexstar operates KWGN where we deployed BPS. NAB provided NIST with BPS receivers and technical support. NIST scientists then performed independent measurements and analysis of BPS using their own techniques and processes. It has been a great experience for us to engage with and learn from the team at NIST. The effort has taught us a great deal about PNT and the capabilities of BPS.
Q: Now that you have submitted your proposal to the FCC, what do you expect to be the timeline for approval, implementation and adoption?
A: The FCC follows a notice-and-comment process for adopting changes to its rules, which can take anywhere from several months to more than a year. The FCC previously convened the Future of Television Initiative to investigate issues associated with the transition, which should give us a bit of a head start. In NAB’s petition, we ask the FCC to establish a timeline that would have the top 55 television markets fully transitioned to ATSC 3.0 by 2028 and the remaining markets by 2030.
Q: How can the GNSS/PNT community help this project?
A: First, it can support the transition to ATSC 3.0 because BPS relies upon it. We need a full transition to recognize its potential. Next, it can continue to collaborate with us. We introduced BPS at the DOT Roundtable in 2022. Since then, we’ve collaborated with the PNT community on research, scientific papers, product design and deployments. We’ve built BPS together, and now we need to deploy it together.
The United Kingdom’s spectrum agency, Ofcom, is seeking comments on its proposal to issue licenses for broadcasting eLoran signals and services. This initiative comes, it says, after the agency was “…approached with a request to authorize use of the 90-110 kHz spectrum for the provision of a long-range navigation system, based on eLoran technology.” Issuing licenses could be a way to treat all interested parties fairly.
After briefly describing the importance of positioning, navigation, and timing (PNT) services to modern life, the Ofcom request for comment observes: “Satellite-based PNT systems like the Global Positioning System (GPS) can be susceptible to interference and can be vulnerable to space weather events. The eLoran technology provides a terrestrial-based alternative … which could in [the] future act as a supplementary or back-up system to GPS. [I]t has the potential to support innovation in the delivery of resilient PNT.”
This rationale is quite similar to that cited by other governments operating Loran-like systems around the world.
Until now, with a few minor exceptions, only government entities and those working on their behalf have been authorized to use the frequency. Such licenses would authorize holders to broadcast eLoran in the 90 kHz to 110 kHz band, which is the portion of spectrum reserved internationally for radio navigation.
From October 2014 to December 2015, the UK had an operational eLoran network serving the waters off its east coast and authorized for maritime use. That system was discontinued when France and Norway bowed to pressure from supporters of Europe’s Galileo system, which was still in development. The UK Ministry of Defence still broadcasts a single eLoran signal from Anthorn, UK, that can be used as a wireless timing source.
Several other nations currently broadcast some version of Loran in the 90 kHz to 110 kHz band. These include PNT systems operated by South Korea, Saudi Arabia, Russia and China. Reports indicate Iran is also broadcasting in the spectrum, though other details remain unclear.
Unconfirmed reports from amateur radio operators in the United States seem to indicate that testing of Loran-like signals in the 90 kHz to 11 0kHz band has been conducted in North America periodically over the last 10 years.
Until now, the UK has only formally authorized eLoran and the frequency for maritime use. Observers in the UK say this Ofcom initiative will almost certainly expand that to its use everywhere and for multiple applications, such as timing for critical infrastructure.
Ofcom says, “[d]eployment of eLoran in the UK could complement existing PNT services, particularly in locations where there is poor GPS coverage or weak signals, like tunnels or deep inside buildings. eLoran could also provide resilience (i.e., back-up) for satellite-based systems against interference, jamming and spoofing, thereby aiding protection of key national infrastructure…”
This Ofcom notice may be the first official move toward encouraging one or more entirely commercial eLoran services.
Commercial wide-area PNT services capable of protecting critical infrastructure and national economies have long faced an uphill battle, though.
Several industry leaders have commented that “it’s impossible to compete with free GNSS!”
The same leaders have also criticized the U.S. government for not “walking the talk” when it comes to resilient PNT. At a U.S. Department of Transportation meeting last year they urged the government to not just tell others, but to set an example and protect itself with resilient PNT services. Doing so, they said, would show industry and users the government is serious and instill confidence that commercial services were reliable and would be sustained.
Yet, experts cite a “chicken and egg” problem.
“The government can’t subscribe to services that don’t exist, and companies can’t stand up and provide nation-wide services without having an anchor-customer first,” according to an industry insider.
To solve this dilemma, public-private-partnerships have been proposed over the years in both the UK and the United States. To date, a willing “public” or government partner has yet to be identified for either nation.
This might be changing in the UK government with growing awareness about the limitations of and threats to GNSS and other space systems. While a national strategy for PNT has been promised for years and is yet to be published, a cross-government PNT office has recently been established.
“The UK is in a great position to lead the world on resilient PNT,” said one observer at a recent Royal Institute of Navigation event. “The key is working with GPS and other GNSS, while at the same time ensuring your nation has its own sovereign system independent of space. We (in the UK) have deep expertise and experience at the GLA (General Lighthouse Authority) with eLoran, and we have a superb tech economy. Britain could be the world’s leading producer of a resilient PNT tech stack that includes eLoran transmitters, receivers that use GNSS, eLoran, and other signals or phenomena, and all the supporting gear and IP (intellectual property) to make it all work.”
“Realizing that vision will take a bit more government leadership than just issuing a few broadcast licenses, though,” they said.
The annual European Navigation Conference (ENC23), set for May 31-June 2, will be hosted by the European Space Agency (ESA) at its ESTEC facilities in Noordwijk, The Netherlands. Abstracts are due no later than Jan. 24, and notification of acceptance or rejection will be sent out by the end of February.
This year’s conference will focus on resilient navigation. Organized by The Netherlands Institute for Navigation (NIN), the conference will address resilience in the broadest sense, including navigation sub-functions, operational routines, standards and policies.
The ENC23 tech committee has broken down the overarching theme into a range of topics, including integral end-to-end navigation solutions, specifics in position, navigation and timing (PNT), routing, data integrity questions and more.
Early-bird registration is open now and ends March 15. General registration begins thereafter and the deadline to register is May 21. For more information about registration and abstract submission, visit the ENC23’s website.
On Nov. 18, the European Space Agency (ESA) announced a Navigation Innovation and Support Programme (NAVISP) partnership with Italy’s Grimaldi Group, as the need for accurate maritime navigation increases. With the Grimaldi Group, NAVISP has taken on the Grimaldi Satellite-Assisted Berthing (GSAB) project, which aims to develop a satellite-based guidance system for docking maneuvers of large vessels.
NAVISP’s GSAB project will use satellite-based multi-sensor technology to improve the efficiency of maneuvers in ports to increase safety while also reducing CO2 emissions. Maritime navigation is too complex for GPS and Galileo alone, so, by fusing those two systems with PNT sensors, the project can achieve its intended outcome.
The project is divided into two phases. In the first phase, NAVISP is working on design, development activities, installation of the sensors in a roll-on, roll-off vessel, and running a test readiness campaign. The second phase includes field tests with the equipped ship in the Grimaldi facilities in the Port of Antwerp-Bruges, Europe’s second largest seaport.
Shipping transport is responsible for more than 80% of goods traded globally, and the Grimaldi Group is one of the largest shipping companies globally with more than 130 ships. As the need for efficient and safe ship transport in and out of ports grows, NAVISP continues to support innovation to improve satellite navigation and positioning systems in the maritime sector, according to ESA.
The 2023 European Navigation Conference (ENC) will take place May 31-June 2 with a focus on resilient navigation. This conference, which will welcome professionals from the positioning, navigation, and timing (PNT) field, is organized by the Netherlands Institute of Navigation, a member of the European Group of Institutes of Navigation (EUGIN).
Given the growing vulnerability of satellite-based position and timing, the conference will focus on resiliency, which requires redundancy in the signal domain, terrestrial and space infrastructures, and on-board implementation — as well as addressing vulnerabilities in navigation functions, data, and guidance control.
Thanks to the hospitality of the European Space Agency, the ENC will be held at the ESTEC site in Noordwijk, The Netherlands, where the Galileo satellite system is designed and where navigation satellites are tested before launching.
Spirent plans to host two seminars in early 2023 where experts will share PNT developments and provide training on Spirent’s products. Registration for the seminars is free and includes a two-week software license that can be downloaded to provide hands-on training.
Seminar training topics includes fundamentals of GPS/GNSS testing, how to create realistic testing scenarios, GPS/GNSS vulnerabilities like jamming and spoofing, vulnerability mitigation and more.
One session will be held in Huntsville, Alabama, March 8-9 and the other in Los Angeles, California, March 14-15. While registration is free, seats at both seminars are limited.
Registration is now open for the jointly sponsored Position Location and Navigation Symposium (PLANS) taking place April 24-27. PLANS is a biennial technical conference that occurs in the spring of odd-numbered years to provide an international forum to share the latest advances in navigation technology. The conference is sponsored by the IEEE’s Aerospace and Electronics Systems Society (AESS) and the Institute of Navigation (ION).
The PLANS conference takes place over four days, with the first day for hosting tutorials and three days dedicated to technical sessions.
The tutorials aim to provide attendees with the opportunity to learn about navigation technology from industry experts. A variety of tutorials are offered to serve the needs of both newcomers and those well versed in the field of navigation. This year’s tutorials will include a range of navigation subjects from core navigation fundamentals to in-depth classes about the latest technologies.
Technical sessions are offered over a three-day period, with four sessions running simultaneously each morning and afternoon. At the technical sessions scientists, researchers, and engineers from around the world present their latest work in the field of PNT. Technical session topics will include inertial sensing and technology; GNSS; integrated, collaborative and opportunistic navigation; and applications to automated, semi-autonomous and fully-autonomous systems.
To view the PLANS 2023 technical program and register for the event, visit ion.org/plans.
New PNT satellites will operate in low Earth orbit (LEO). (Image: ESA)
News from the European Space Agency (ESA)
Satellite navigation is headed closer to users. ESA’s Navigation Directorate is planning an in-orbit demonstration with new navigation satellites that will orbit just a few hundred kilometers in space, supplementing Europe’s 23,222-km-distant Galileo satellites.
Operating added-value signals, these novel low-Earth-orbit (LEO) positioning, navigation and timing (PNT) satellites will investigate a new multi-layer satnav system-of-systems approach to deliver seamless PNT services that are much more accurate, robust and available everywhere.
Global in coverage, free for everyone to use, GNSS such as Europe’s Galileo have already transformed our society, and due to their sheer omnipresence their influence continues to grow. In 2021, the population of satnav receivers reached 6.5 billion around the world, and the sector is projected to maintain a 10% annual growth rate in the years ahead. But in various respects the standard GNSS approach is nearing the limits of optimum performance — to get even better, added ingredients are becoming essential.
“Satellite navigation has enabled a vast range of applications in recent years, but this very success is inspiring still more demanding user needs for the coming decade,” said Lionel Ries, head of ESA’s GNSS Evolutions R&D team, overseeing the agency’s LEO-PNT studies.
“For use cases such as autonomous vehicles, ships or drones, robotics, smart cities or the industrial internet of things for control of factory systems, the positioning requirements are growing from the current meter-scale to centimeter scale or even more precise, based on continuously reliable signals that are available anywhere, anytime — even indoors —while able to overcome interference or jamming.
“Up until now we have relied for positioning on the classical solution of GNSS such as Galileo, located in medium Earth orbit and based on L-band signals. Standard GNSS alone is not going to be able to fulfil all these future user demands. Instead Europe needs to seize the opportunity to investigate the potential of the kind of LEO constellations that are already on the way in the global market to enable new kinds of PNT services.”
Simply by virtue of physics, with less of a distance to cover down to Earth, the signals from these LEO-PNT satellites can be more powerful, able to overcome interference and reach places where today’s satnav signals cannot reach.
Additionally, by adopting novel navigation techniques and a wider range of signal bands the satellites can address particular user needs: for instance at lower orbits the satellites themselves move more rapidly relative to Earth’s surface — think of the International Space Station at 400 km that orbits the Earth every 90 minutes — which offers possible advantage in the time needed to reach very accurate positions. Also some bands could offer greater penetration in difficult environments while other bands could offer higher robustness and precision.
Mega-constellations of hundreds or even thousands of low-orbiting satellites offer a means of acquiring continuous coverage for telecommunications services or Earth observation. (Image: ESA)
The purpose of ESA’s plan to perform an in-orbit demonstration of low Earth orbiting satnav satellites is precisely to consolidate the types of signals, enabling technologies and their potential for future services.
The plan is to build and fly an initial mini-constellation of at least half a dozen satellites to test capabilities and key technologies, as well as demonstrating signals and frequency bands for use by a follow-on operational constellation, in the same way that Europe’s GIOVE test satellites paved the way for Galileo. Success will place European industry in pole positions for follow-on commercial undertakings, as well as planned institutional programs.
“Each individual satellite would be comparatively small, below 70 kg in mass, compared to a 700 kg current Galileo operational satellite,” added Roberto Prieto-Cerdeira, Galileo Second Generation satellite payload manager and LEO-PNT project preparation manager as part of ESA’s FutureNAV program.
“They can be comparatively more streamlined because they can benefit from other means to calculate the accurate time without extremely precise atomic clocks on board — including relayed signals from the Galileo satellites above them. These satellites would also be built on a rapid batch production basis to save time and cost — we are targeting three years at the most from signing the contracts to the first satellites in orbit, the same kind of timescale achieved by GIOVE-A in the early 2000s.”
A vision of the future shows layered satellite navigation stretching from Earth to the Moon. (Image: ESA)
“It is ESA’s ambition to ensure Europe maintains a world-class space industry, and navigation today forms the single largest downstream space sector, worth about €150 billion annually and growing at the rate of 10% per year,” said ESA Director of Navigation Javier Benedicto-Ruiz. “Standing still is not an option; instead we need to explore new technical avenues to spur European competitiveness and commercialization.”
An operational version of the LEO-PNT constellation would represent a whole new layer for PNT delivery, combined with traditional GNSS as well as 5G/6G-based positioning on the ground, and fused with data from sensors in the user terminals.
Interest from industry
ESA has been researching core elements of the LEO-PNT concept since 2016. Now, with numerous low Earth orbit constellations already taking shape around the globe, the time is right to move from basic research to in-orbit demonstration.
Interest from European industry in the LEO-PNT project has been very high, shown by a recent Request for Information where ESA presented details of how companies and institutions might participate and a large number of companies registered and presented possible concepts and contributions.
Forward to FutureNAV
LEO-PNT is supported through the ESA Directorate of Navigation’s FutureNAV programme, which also includes the GENESIS satellite to measure the shape of Earth more accurately than ever before while also boosting the positioning performance of satnav satellites. The FutureNAV programme, which includes both GENESIS and the LEO-PNT initiative, is up for decision at ESA’s next Ministerial Conference, taking place in Paris on Nov. 22-23. Read the fact sheet here.
Until now, all navigation satellites have flown in medium-Earth orbit – up at 23,222 km in the case of Galileo, which delivers meter-level accuracy. At such altitudes the satellites move slowly across the sky, helping ensure global availability of satellite navigation signals, albeit at relatively low power.
ESA’s LEO PNT constellation would move to a “multilayer system of systems” approach, with medium-Earth orbit signals supplemented by those from LEO satellites at altitudes of less than 2,000 km — along with additional inputs from terrestrial PNT systems and user-based sensors, made up of approximately a dozen satellites, helping European companies move forward at a time when worldwide commercial interest is high in LEO constellations of all kinds, especially for telecommunications and PNT.
The satellites themselves can be stripped down compared to current navigation satellites, because they would essentially be relaying satnav signals from MEO. This is a key point because there will need to be many more satellites to ensure global coverage — because the lower the orbit the faster each individual satellite will pass across the sky. This fact also opens the way to a more agile “New Space” approach to satellite construction for European firms, with smaller payloads and simplified operations from the ground.
Their signals will be much stronger (potentially able to penetrate indoors), and transmitted on novel frequencies, which – along with the new geometries made possible by LEO satellites – should enhance overall service resilience. LEO PNT will also deliver faster position fixes and enable rapid two-way authentication checks. And overall signal availability will be boosted enormously, especially in high-latitude and polar regions.
To paraphrase Galileo Galilei — the great Italian astronomer, philosopher, engineer, mathematician and physicist — positioning, navigation and timing (PNT) does not revolve around GPS. The European GNSS named after the father of modern science (as Albert Einstein called him) is making great strides and currently provides more accurate positioning than the United States’ GPS, Russia’s GLONASS, or China’s BeiDou-3. In fact, there are more Galileo satellites providing an L5 signal than GPS satellites.
I heard much well-earned pride about Galileo’s achievements expressed by European presenters at the Institute of Navigation’s GNSS+ conference in Denver in September; during a visit to the European Commission’s Joint Research Center in Ispra, Italy, on Oct. 7; and at the INTERGEO conference and trade show in Essen, Germany, on Oct. 18-20. (On the way, I stayed several days in Pisa, Italy — where I spent my teen years when my father taught physics at the city’s university — at a friend’s home about 100 feet away from the house where Galileo was born in 1564.)
While two more launches are required to complete the Galileo constellation so that it will have at least one spare satellite per plane, its service availability is already at 98-99% and a new ground segment has been deployed. A second generation of satellites is on its way, with expected initial operational capability in 2028 and full operational capability starting after 2031. Its features will include new signals, improved effective isotropic radiated power (EIRP), inter-satellite links, and a 15-year lifespan.
The Open Service Navigation Message Authentication (OSNMA), a free data authentication function for users of Galileo’s Open Service, has been stably transmitted worldwide for a year. It will enable users to verify the authenticity of GNSS data, thereby greatly helping to detect instances of spoofing. A declaration of initial service is foreseen for 2023, and the first OSNMA-capable receivers are already on the market.
Galileo’s High Accuracy Service (HAS) signal has been available worldwide with orbit and clock corrections and biases for Galileo and GPS since July 22. While it is still in its validation phase, it is already performing very well and an initial service declaration is expected by the end of the year, including an Internet-based correction distribution service.
Galileo is also developing an emergency warning service that will use the L1 band to broadcast alerts and guidance to populations at risk of natural disasters. It is expected to enter service in 2024 and reach any Galileo-enabled device, of which there are already about three billion. Other services will include advanced timing, space service volume (to aid in the positioning and navigation of spacecraft in high-Earth orbits), advanced receiver autonomous integrity monitoring (ARAIM), and predictions of ionospheric perturbations.
Like so much else, completion of the Galileo constellation was affected by Russia’s war in Ukraine, because two launches planned for this year from French Guyana aboard Russian Soyuz rockets were scrapped.
Finally, one of my favorite quotes from Galileo: “Measure what can be measured and make measurable what cannot yet be measured.”