The companies will explore the potential to provide optimal products and solutions by combining Murata’s long-standing expertise in high-frequency and wireless communications, sensors, timing devices and module design with Xona’s advanced low-Earth-orbit (LEO)-based positioning and timing synchronization technologies.
Benefit of LEO satellites
Because LEO satellites orbit closer to Earth, they can deliver stronger signals to the ground, which improves signal reception in city centers and indoor environments. Their higher orbital speed compared with GNSS enables observation data in a shorter period of time, which enhances performance in urban areas via accelerated convergence times and reduction in multipath errors.
Against this backdrop, technologies that combine satellites in different orbital layers, including LEO, are attracting attention as an approach to complement and strengthen the accuracy and reliability of PNT, with growing interest in their adoption for higher precision and enhanced resilience.
The role of Pulsar
Xona offers Pulsar, a PNT service based on a satellite network composed of a constellation of dedicated LEO satellites with significantly stronger signals than traditional GNSS systems. Pulsar is compatible with GNSS, enabling these enhanced capabilities to be integrated with typical GNSS user equipment in a way that complements and improves existing systems.
As a purpose-built modern PNT service, Pulsar aims to achieve centimeter-level positioning accuracy, greater performance in urban areas, and enhanced resilience against jamming and spoofing.
Previous venture and latest MOU
Murata has previously invested in Xona through Wonderstone Ventures, Murata’s corporate venture capital arm. This initiative represents part of an ongoing collaboration built upon the existing relationship between the two companies.
Based on this MOU, the two companies will explore the potential to provide optimal products and solutions by combining Murata’s long-standing expertise in high-frequency and wireless communications, sensors, timing devices, and module design with Xona’s advanced LEO-based PNT positioning and timing synchronization technologies, with the goal of realizing highly accurate and highly reliable positioning and timing synchronization.
Looking ahead, the companies will evaluate potential applications in data centers and financial institutions that require highly accurate timing synchronization to support 5G/6G communications, as well as in off-road industries such as construction and agricultural machinery, where positioning needs are high in environments where GNSS is difficult to use.
Through these efforts, the companies aim to enhance performance and create new solutions across various sectors.
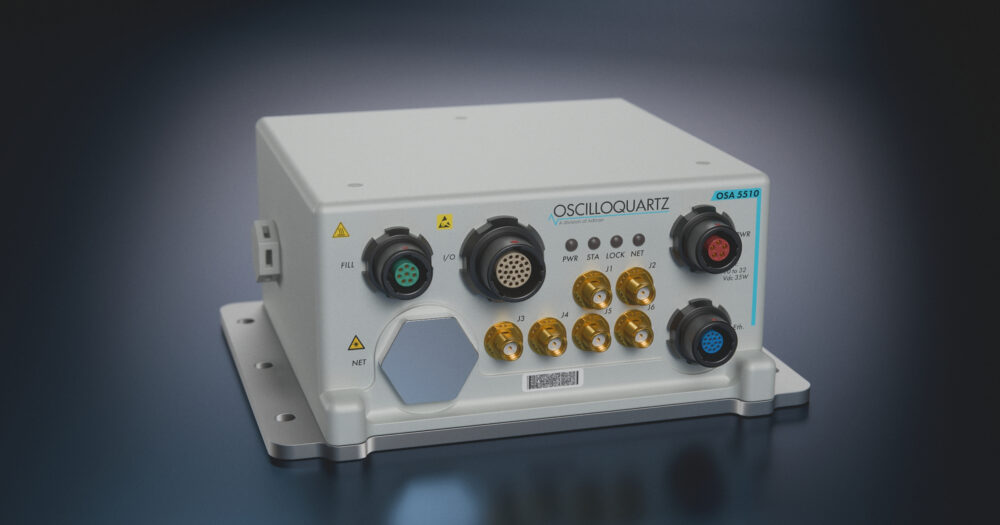
Oscilloquartz has launched its ruggedSync Series OSA 5510, a ruggedized timing and synchronization platform engineered for defense and other harsh, mission-critical environments.
The OSA 5510 is designed for deployment in tactical communications networks, mobile command centers, aviation systems and other highly demanding operational environments. It combines PTP grandmaster and NTP server functionality with synchronization assurance and resilient holdover in a compact military (MIL)-qualified platform.
Multi-band GNSS support, encrypted and authenticated timing options, and environmental protection enable operation in contested and GNSS-denied environments where trusted synchronization must be maintained.
Built to support resilient defense timing architectures, the OSA 5510 integrates advanced synchronization technologies and flexible mission-critical interfaces within a hardened platform compliant with MIL-STD-810H and MIL-STD-461G. The solution supports IEEE 1588v2 PTP, SyncE and secure NTP services, while programmable I/O and timecode interfaces, including STANAG, Have Quick, IRIG and PPS/CLK distribution, support diverse defense payloads and operational requirements. Optical and copper SFP/SFP+ 1G/10G interfaces and dual power feeds further enable deployment across modern high-bandwidth defense networks.
The ruggedSync Series OSA 5510 strengthens multi-source resilience through zero-trust architecture, with support for M-code, Galileo PRS and Iridium STL. Extended holdover, low phase-noise outputs, and jamming and spoofing detection and mitigation help maintain continuity during GNSS degradation or disruption, while White Rabbit readiness supports advanced timing distribution use cases.
The launch also builds on Oscilloquartz’s expanding global aerospace, defense and government partnerships, including regional representative and VAR relationships supporting resilient timing and assured PNT deployments across the Americas, EMEA and Asia-Pacific.
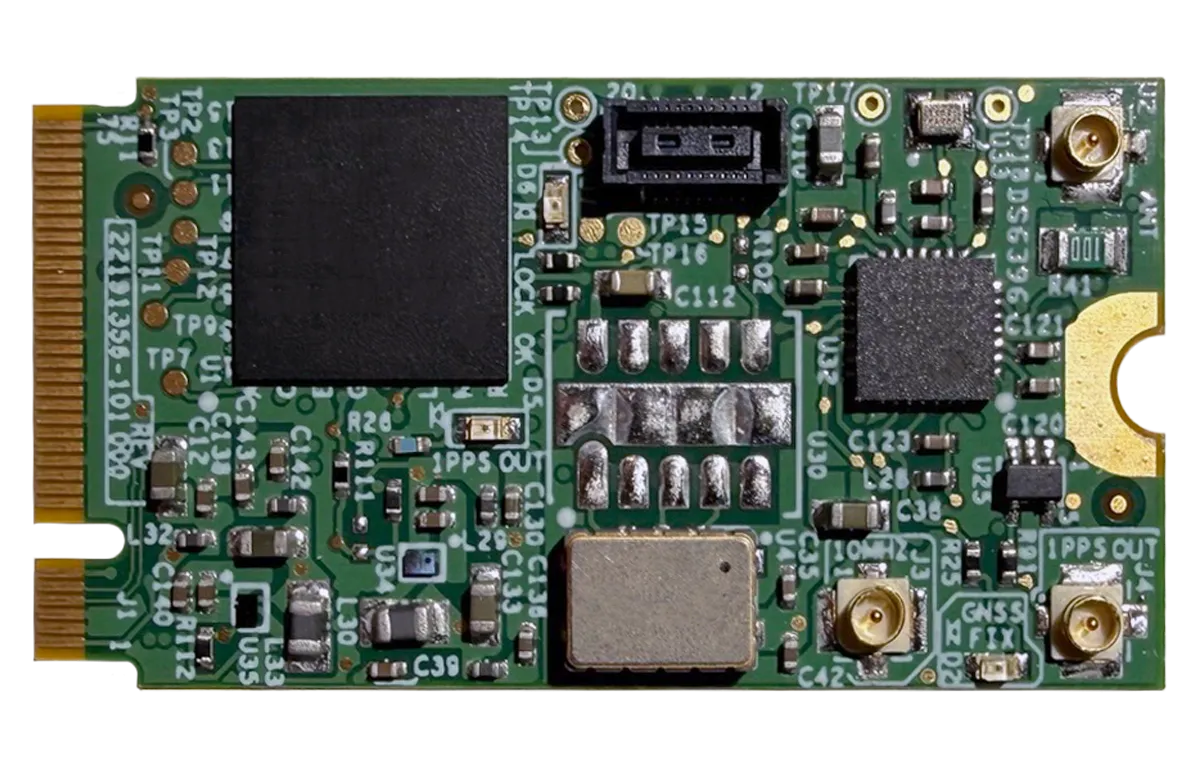
Viavi Solutions has launched the µPNT GDO-1000, a GNSS-disciplined oscillator built in the M.2 B-key form factor, suitable for low size, weight and power (SWaP) platforms.
Measuring 22 x 42 mm (the size of a postage stamp) and weighing less than 4 grams, the GDO-1000 is designed for platforms requiring accurate timing in places where traditional timing modules do not fit or are too power-hungry, including defense and airborne platforms, unmanned systems, data center cards, and communications equipment.
The µPNT GDO-1000 addresses these challenges through a combination of capabilities:
Dual-frequency L1/L5 GNSS reception with microsecond-class 24-hour holdover enables precise, resilient timing in compromised conditions.
The M.2 B-key form factor drops into modern compute platforms, time appliance cards, and embedded systems without custom mechanical design, drawing approximately half a watt.
Patented AI and ML algorithms developed by the Jackson Labs team, now part of VIAVI, predict and compensate for oscillator behavior across environmental conditions
The microelectro-mechanical systems (MEMS) oscillator delivers better thermal stability across the full military temperature range than traditional quartz oven-controlled crystal oscillators (OCXOs), with sustained phase noise and Allan Deviation performance under vibration and shock
It accepts an external 1PPS input, allowing it to be disciplined by M-code GPS, alternative navigation sources, or other external references without hardware modification
Multiple 1PPS and low-phase-noise 10MHz coaxial inputs and outputs for system integration flexibility, despite its miniature size.
The GDO-1000 will be on display by Viavi at booth 407 during the 2026 Joint Navigation Conference, taking place June 1-4 at the Northern Kentucky Convention Center. As part of the event technical program, Lisa Perdue and Nino De Falcis of Viavi will speak on a “New Cesium-Less ePRTC Solution to Provide Timing for Homeland Critical Infrastructure.”
A two-kilometer free-space demonstration validates quantum-secure communications and resilient PNT capabilities
Xairos Systems has met a significant milestone for its Ares Quantum Optical Terminal, a robust system designed to deliver quantum-secure, high-data-rate communications and resilient position, navigation and timing (PNT) in RF- and GPS-denied environments.
The Ares terminal will combine 10 Gbps free-space optical communications, entangled photon distribution for timing and encryption key sharing, and a stable clock ensemble disciplined by Xairos’ exclusive Quantum Time Transfer technology.
Xairos completed two-kilometer free-space range testing with Space Development Agency-compliant optical communications and established simultaneous quantum and optical links using a common Ares Quantum Optical Terminal. This free-space testing — distinct from fiber-based demonstrations — marks a critical step toward real-world operational deployment.
The fully integrated Ares Quantum Optical Terminal will combine 10 Gbps free-space optical communications, entangled photon distribution for timing and encryption key sharing, and a stable clock ensemble disciplined by Xairos’ Quantum Time Transfer (QTT) technology — all within a ruggedized compact package. QTT provides unprecedented security and resilience for PNT where GPS and RF signals are unavailable or jammed.
The Ares Quantum Optical Terminal underpins a communications and PNT mesh network for aircraft, uncrewed aerial systems (UAS), ships, and other assets in contested environments, and serves as a foundation for a future space-based architecture spanning satellites, air vehicles and ground nodes.
Apogee has been awarded a five-year, $103 million task order to provide positioning, navigation and timing (PNT) support services for the U.S. Department of Defense.
The contract supports modernization, acquisition and sustainment planning across the international PNT enterprise, ensuring resilient and reliable capabilities that underpin critical military operations worldwide.
Under the contract, Apogee will deliver technical expertise and mission support across multiple locations, including Robins Air Force Base, Georgia; Wright-Patterson Air Force Base, Ohio; and Eglin Air Force Base, Florida.
Apogee’s team will contribute to advancing next-generation PNT capabilities, strengthening system performance and supporting the continued evolution of a mission essential to joint and coalition operations.
Apogee is headquartered in Colorado Springs, Colorado, with regional offices nationwide.
TrustPoint has been awarded a $4 million Tactical Funding Increase (TACFI) contract to demonstrate a GPS-independent positioning, navigation and timing (PNT) system.
The award was issued by SpaceWERX, the innovation arm of the United States Space Force, and jointly funded by the Small Business Innovation Research (SBIR) program and the Commercial Space Office (COMSO). It supports a full end-to-end demonstration of TrustPoint’s resilient navigation architecture designed for defense and commercial applications.
Under the contract, TrustPoint will design, deploy and operate a fully integrated PNT system comprising four satellites and four ground stations, delivering a complete operational architecture. The program will execute an end-to-end system demonstration, including live trilateration across multiple space and ground assets, operational services and advanced receivers.
With an accelerated execution timeline, initial system deployments will occur within 12 months, establishing a rapid deployment model designed to scale to significantly larger constellations while prioritizing affordability, operational relevance, and capital efficiency.
“We founded TrustPoint on the belief that resilient navigation does not require billion-dollar constellations,” said Patrick Shannon, founder and CEO of TrustPoint. “This program will prove our technology’s GPS independence while demonstrating that real, operational PNT capability can be delivered with exceptional capital efficiency.”
Beyond GPS-independent C-band demonstrations, the system will validate a software-defined architecture that supports on-demand reconfiguration of navigation services in contested, degraded and denied environments, pioneering commercial delivery of this capability. TrustPoint’s experience includes the first C-band GNSS signal transmission with real-time reception and the first broadcast-based ground-to-space C-band PNT demonstration.
The program directly advances national security objectives. It also establishes a scalable foundation for future commercial services, redefining what is possible for users who require reliable PNT in GPS-challenged environments.
On a January morning in 2026, a GPS jammer powered up near Shiraz, Iran. It was not the first, and it would not be the last. The Strait of Hormuz corridor has become one of the most persistently jammed airspaces on Earth. But this time, two satellites were watching from very different vantage points, and together they would demonstrate something new: that spaceborne sensors can localize a terrestrial GPS jammer to within a few kilometers, using physics alone.
This article presents the first direct comparison of Cyclone Global Navigation Satellite System (CYGNSS) — a NASA GNSS reflectometry constellation — and NASA-ISRO Synthetic Aperture Radar (NISAR) — an L-band synthetic aperture radar for GPS jammer localization. The results challenge assumptions about which modality performs better and reveal that the answer depends on a question most analysts forget to ask.
The setup: Known jammer, known position
Validation requires ground truth. With help from the PNT community, we identified a GPS jammer operating near 27.32°N, 52.87°E (approximately 50 km southwest of Shiraz) that was active on Jan. 8 and Jan. 20, 2026, with confirmed quiet periods on Dec. 15 and Dec. 27, 2025. The jammer’s position was established through independent signals intelligence.
This gave us a controlled experiment: two “jammer ON” dates and two “jammer OFF” baseline dates, with satellite coverage from both CYGNSS and NISAR spanning the full period.
Two satellites, two physics
CYGNSS is a constellation of eight microsatellites that measure GPS signals reflected off Earth’s surface. Each spacecraft carries a delay-Doppler receiver that maps reflected signal power across a grid of delay and Doppler bins, known as the delay-Doppler map, or DDM. When a terrestrial jammer is active, it floods the GPS band with noise, elevating the DDM noise floor and suppressing the coherent surface reflection. The effect is detectable hundreds of kilometers from the jammer, creating a wide-area footprint in the reflected signal data.
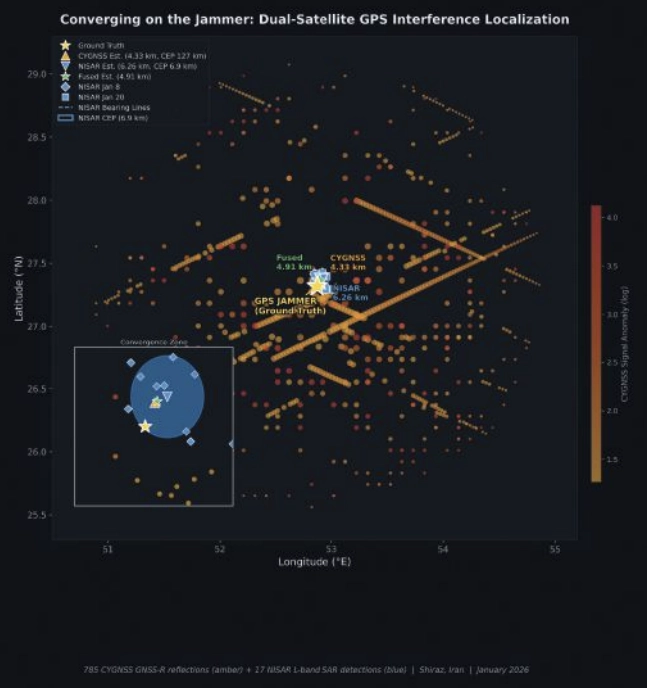
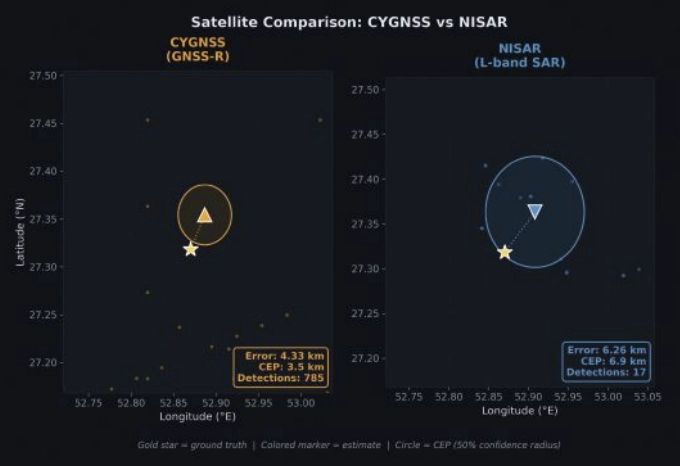
FIGURE 1 Jammer localization tracks from both CYGNSS and NISAR satellite constellations. (All figures by Sean Gorman)
NISAR operates an L-band SAR at 1.257 GHz, just 30 MHz from the GPS L2 frequency at 1.2276 GHz. When a GPS jammer’s broadband emissions leak into NISAR’s receive band, they create characteristic streaks in the SAR imagery. The streaks are elongated in the cross-track (range) direction, not along-track, a counterintuitive result that follows directly from SAR signal processing. In azimuth (along-track), the jammer is a fixed-point source with a valid Doppler history, so the SAR azimuth processor focuses it correctly, similar to any ground target. But in range (cross-track), the jammer’s broadband noise does not match the SAR’s chirp waveform, so range compression smears the energy across many range bins rather than compressing to a point. The result is a streak perpendicular to the flight direction, whose along-track centroid encodes the jammer’s latitude and whose cross-track extent encodes a range arc, which is the distance from the orbit ground track (FIGURE 1). The bearing of each streak encodes the jammer’s direction relative to the satellite’s ground track.
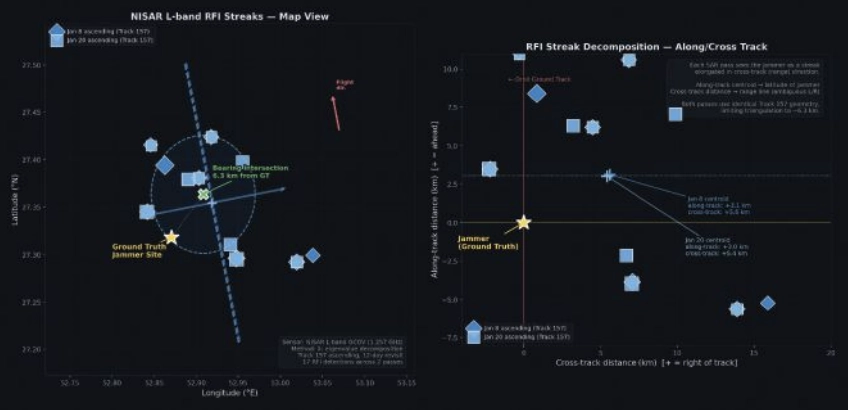
FIGURE 2 Crosstrack visualization for NISAR RFI streaks.
The two sensors could hardly be more different. CYGNSS sees the jammer’s effect on reflected GPS signals, offering an indirect measurement spread across hundreds of specular reflection points. NISAR sees the jammer’s emissions directly in its own receiver, which is a more precise measurement, but only along the satellite’s narrow ground track. FIGURE 2 shows both detection sets converging on the jammer location.
CYGNSS: 785 Detections, 4.33 km Error
We processed all CYGNSS Level 1 data within 200 km of the jammer location on both ON and OFF dates. Four detection methods contributed observations:
■ DDM noise floor (419 detections): The pre-computed ddm_noise_floor variable, calibrated against the thermal noise reference, proved the strongest discriminator. Near-jammer values exceeded 15,000 counts against a ~10,000 mean background.
■ Spatial noise grid (299):A 10 km gridded analysis identified cells with anomalously elevated noise relative to adjacent cells.
■ SNR hole detection (66): Coherent surface reflections were suppressed near the jammer, creating spatial “holes” in the SNR field.
■ NBRCS drop (1): Surface reflectivity dropped approximately 16% near the jammer, though this method produced few threshold exceedances.
Across four DDM channels per spacecraft and multiple passes, this yielded 785 total anomalous observations on the jammer-ON dates.
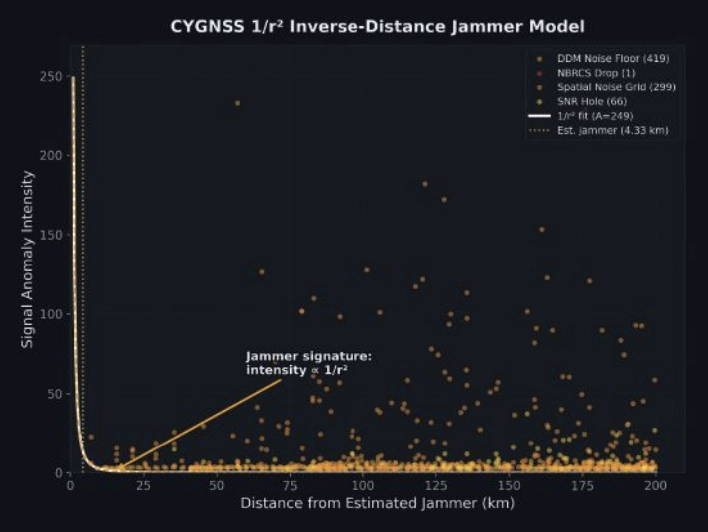
FIGURE 3 Scatterplot of interference insensity versus distance for CYGNSS.
Localizing using a simple centroid of all 785 detection positions placed the jammer 32.1 km from truth, with too many distant, low-SNR detections diluting the estimate.
Instead, we fit a parametric 1/r² inverse-distance model:
I(r)=Ar2
where A is a free amplitude parameter and r is the distance from a candidate jammer position. We jointly optimized the jammer position and amplitude using SciPy’s Nelder-Mead optimizer across all 785 observations, weighted by intensity. The optimizer converged on a position 4.33 km from ground truth, providing a 27.7 km improvement over the centroid (FIGURE 3).
The baseline: Zero false positives
On the jammer-OFF dates (Dec. 15 and Dec. 27, 2025), the pipeline produced exactly zero detections using the same thresholds, geographic area and satellites: a completely clean result. This suggests that the 785 detections are unlikely to be sensor artifacts or geographic anomalies. They disappear when the jammer turns off.
NISAR: 17 Detections, 6.26 km Error
NISAR’s approach is fundamentally different. Rather than measuring hundreds of reflected signals across a wide area, it captures direct emissions in a narrow swath, but with far greater geometric precision.
We processed NISAR L2 GCOV (geocoded covariance) products from Track 157, Frame 15 (ascending) for three dates: the Dec. 27 baseline and the Jan. 8 and Jan. 20 jammer-ON passes. The detection pipeline used eigenvalue decomposition of the polarimetric covariance matrix:
λ₁ ratio thresholding: In jammer-contaminated pixels, the dominant eigenvalue λ₁ of the 2×2 [HH, HV] covariance matrix rises sharply relative to the scene mean, indicating an unpolarized additive source.
Cross-polarization ratio (HV/HH): GPS jammer emissions are unpolarized, disproportionately elevating the HV channel. Anomalous HV/HH ratios flag contaminated azimuth lines.
Iterative outlier trimming: Three rounds of 1.5σ clipping removed scattered false detections, leaving 17 high-confidence streak centroids.
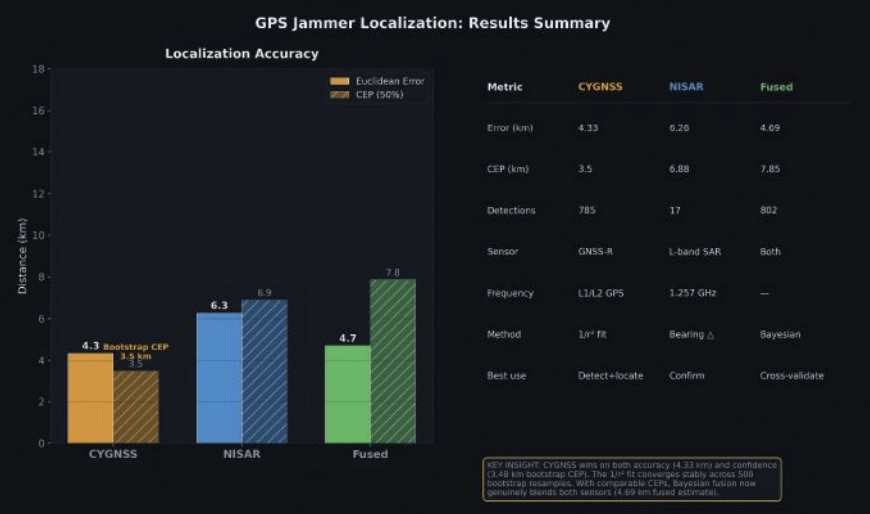
FIGURE 4 Error and CEP Metrics Comparison for CYGNSS and NISAR.
With detections from two passes on different dates, we had two independent bearing lines. Each pass’s streak centroids defined an azimuth aligned cluster whose major axis pointed toward the jammer. A PCA fit to the two clusters extracted the bearing: 308.1° from the Jan. 8 pass and 316.2° from Jan. 20. Their intersection — computed via scipy optimization of the angular residual — landed 6.26 km from ground truth (FIGURE 4).
The along-track/cross-track decomposition reveals why the 6.26 km error is a geometric ceiling for this dataset, not a processing limitation. Both passes come from the same Track 157 ascending orbit on a 12-day repeat cycle. The intensity-weighted along-track centroids land at +3.0 km and +3.1 km north of the jammer, a direct stable latitude measurement. The cross-track centroids land at +5.4 km and +5.6 km east of the orbit ground track, a range measurement. But because both passes share identical orbit geometry, the two range arcs are nearly parallel. The bearing difference between passes (308.1° vs 316.2°) is only 8.1°, producing a shallow intersection angle and poor cross-range resolution. A single descending pass, which would cross the ascending track at approximately 60-70°, would transform the geometry from two near-parallel lines to a genuine triangulation, potentially reducing the localization error to sub-2 km. Unfortunately, no descending NISAR pass covering this jammer site was available in the beta archive, which ends on Jan. 20, 2026.
The CEP (circular error probable, the radius containing 50% of repeated estimates) was 6.88 km, meaning if we ran this analysis on many similar jammers, half our estimates would fall within ~7 km.
Who wins?
CYGNSS wins, and not just on accuracy.
A naive confidence metric for the 1/r² fit would be the scatter of the 785 input detections (CEP = 127 km). But the detections are not the estimate; they are the inputs to a model fit. The relevant confidence question is: How stable is the fitted position?
We answered this with a 500-iteration bootstrap: resample the 785 detections with replacement, re-run the 1/r² optimizer each time and measure the spread of the resulting position estimates. The bootstrap CEP, the median radial distance across 500 fitted positions, was 3.48 km. The optimizer converges stably to within a few kilometers of the same location regardless of which detections are included.
This means CYGNSS achieves 4.33 km error with 3.48 km confidence, both better than NISAR’s 6.26 km error and 6.88 km confidence.
The bootstrap CEP also reveals what the raw scatter obscures: the 1/r² fit is constrained primarily by the ~80 high-intensity detections within 30 km of the jammer. The remaining 700 distant, low-intensity detections contribute little to the position estimate — they are correctly downweighted by the intensity-weighted least squares. The fit’s stability comes from the physics: a 1/r² signal has steep gradients near the source, providing strong positional constraints where it matters most.
Bayesian fusion: Can we get both?
The obvious next question: Can we combine CYGNSS’s wide-area sensitivity with NISAR’s geometric precision? We implemented four fusion strategies, all designed to work without ground truth:
■ Bayesian Gaussian posterior: Model each sensor’s estimate as a 2D isotropic Gaussian with σ = CEP/1.1774. The posterior is the product of the two Gaussians: an analytical precision-weighted mean.
■ NISAR-prior constrained 1/r²: Re-run the CYGNSS optimizer with a Gaussian regularization term pulling toward the NISAR estimate, sweeping the regularization weight λ from 0.01 to 10.
■ NISAR-proximity re-weighted 1/r²: Apply a Gaussian kernel centered on the NISAR estimate to the CYGNSS detections before fitting, effectively upweighting observations consistent with the SAR result.
■ Joint CEP-balanced: Combine the CYGNSS gradient signal with NISAR cluster proximity, weighted by (σ_CYGNSS/σ_NISAR)².
FIGURE 5 Summary statistics for jammer localization with CYGNSS, NISAR and fused approach.
With the bootstrap CEP, the precision ratio flips. The CYGNSS Gaussian (σ = 2.95 km) is now 2× tighter than NISAR (σ = 5.84 km). The Bayesian posterior, the precision-weighted mean, lands at 4.69 km, pulling toward CYGNSS’s better estimate while incorporating NISAR’s independent geometric constraint. FIGURE 5 shows the fusion: two comparable Gaussians whose product is tighter than either alone.
The fused result (4.69 km error, 7.85 km CEP) is not quite as accurate as CYGNSS alone (4.33 km), because NISAR’s 6.26 km estimate pulls it slightly away from truth. But operationally, the fusion provides a cross-validated answer: two independent physics arriving at similar locations builds confidence that neither sensor is producing an artifact.
The key insight is that the bootstrap CEP unlocked meaningful fusion. When the raw scatter CEP (127 km) was used, NISAR dominated the posterior 343:1 and fusion added nothing. With the fit-based CEP (3.48 km), both sensors contribute, and the posterior reflects genuine multi-modal evidence.
Operational implications
For CYGNSS: CYGNSS excels at both detection and localization. Its 785 detections across a 200 km radius, with zero false positives on baseline dates, provide unambiguous jammer detection. The 1/r² fit achieves 4.33 km accuracy with a bootstrap-verified 3.48 km CEP, meaning an analyst can trust the result to single-digit kilometer precision without ground truth. CYGNSS’s eight-satellite constellation also provides sub-daily revisit, enabling near-real-time monitoring.
For NISAR: NISAR provides independent geometric confirmation. With just two passes over an active jammer, the bearing intersection achieved 6.26 km accuracy with a 6.88 km CEP. The 6.26 km result is constrained by orbit geometry, not by detection sensitivity. Our two ascending passes from Track 157 produced nearly parallel range arcs with only 8.1° of bearing separation. Adding a single descending pass would provide a crossing angle of 60° to 70° and could reduce localization error to sub-2 km — transforming NISAR from a confirming sensor into a precision localization tool in its own right. The limitation in this study was data availability: The NISAR beta archive contained only ascending Track 157 passes over the jammer site. NISAR’s 12-day repeat cycle and fixed ground track also mean the jammer must be active when the satellite passes overhead. NISAR’s current value is as a confirming sensor — when both modalities converge on the same location, confidence increases beyond what either achieves alone.
For Fusion: With comparable CEPs (3.48 km vs 6.88 km), fusion now produces genuinely blended estimates. The Bayesian posterior at 4.69 km reflects real multi-sensor information. Future improvements, such as more NISAR passes with diverse bearings or CYGNSS multi-week accumulation, would tighten both estimates further.
For the Adversary: These results demonstrate that GPS jammers operating in contested airspace are observable and localizable from orbit using openly available civilian satellite data. The 4.33 km CYGNSS result is approximately 2× better than the published state of the art for GNSS-R jammer localization (~9 km grid resolution, Chew et al., 2023) and the NISAR bearing intersection approach has not been previously demonstrated for jammer geolocation.
Still broadcasting: Jammer persistence through conflict
The validation analysis used January 2026 data. But on Feb. 28, armed conflict erupted in the region. Did the jammer survive?
We ran the CYGNSS noise floor detection pipeline for each day from Feb. 28 through April 6, comparing against the December 2025 baseline. The answer is unambiguous: The jammer is not only still active — it is operating at dramatically higher power.
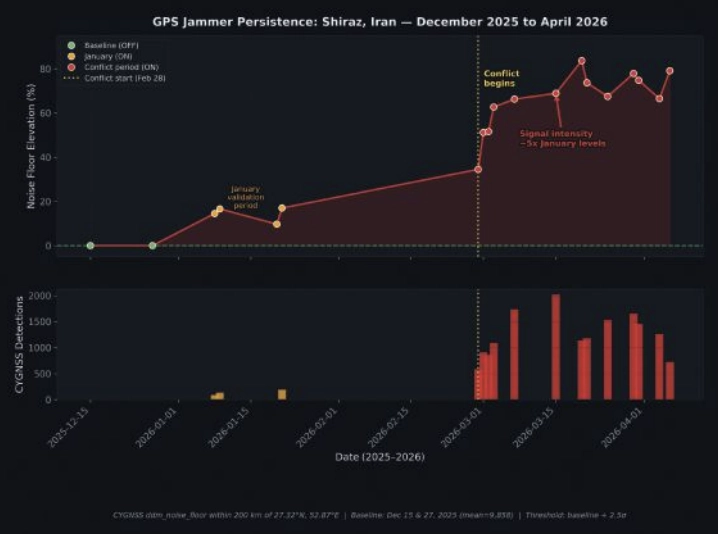
FIGURE 6 A timeline of jammer activity for Shiraz, Iran, from December 2025 to April 2026.
In January, the jammer elevated the CYGNSS noise floor by approximately 15% above baseline. By early March, days after the conflict began, noise elevation had jumped to 50% to 60%. By mid-March, it reached 70% to 84%, where it remained through early April. Detection counts tell the same story: 89 to 192 per day in January, rising to 1,000 to 2,000 per day during the conflict (FIGURE 6).
The escalation was immediate. On Feb. 28, noise elevation was +34.5%, already double the January level. By March 3, it had reached +62.7%, and by April 6, it peaked at +79.1%. The signal has remained at 5× the January intensity through the most recent available data (April 6, 2026).
Several interpretations are consistent with this pattern:
■ Power increase: The operator increased jammer output power, perhaps in response to the conflict or as a defensive posture against GPS-guided munitions.
■ Additional jammers: Multiple units may have been co-located or deployed nearby, creating an aggregate signature larger than any single device.
■ Duty cycle change: The jammer may have shifted from intermittent to continuous operation.
What is clear is that the jammer we localized in January was not incapacitated by the conflict. It was amplified. CYGNSS’s sub-daily revisit capability makes this kind of persistent monitoring possible using entirely passive, civilian satellite data — no tasking, no cooperation with the target state and no risk to reconnaissance assets.
Context and prior work
CYGNSS-based RFI detection builds on work by Chew et al., 2023, who demonstrated grid-level jammer detection at approximately 9 km resolution using DDM noise floor anomalies. Our 1/r² parametric fit extends this from detection to localization, achieving sub-5 km accuracy by exploiting the physics of signal power decay.
At the other end of the precision spectrum, Murrian et al., 2021, demonstrated ~220 m jammer localization using ISS-mounted Doppler measurements of raw intermediate-frequency (IF) data. This approach achieves an order of magnitude better precision than our methods but requires specialized hardware and raw signal access not available on current operational satellites.
The NISAR bearing intersection approach demonstrated here is, to our knowledge, the first published use of L-band SAR RFI streaks for jammer triangulation. The key insight is that NISAR’s proximity to GPS L2 (just 30 MHz separation) makes it an unintentional but effective GPS interference sensor.
Summary
Two satellites, two physics, one jammer. CYGNSS sees the interference footprint across hundreds of kilometers and localizes the source through inverse-distance physics. NISAR sees the emissions directly in its SAR receiver and triangulates through bearing intersection. Both achieve sub-7 km accuracy independently; together, they cross-validate and build the confidence that operational use demands.
The jammer near Shiraz is still there — louder than ever. The satellites are still watching.
Chew, C., Shah, R., Zuffada, C., et al. (2023). “Demonstrating CYGNSS as a Tool for Detecting GNSS Interference on a Global Scale.” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing.
Murrian, M.J., Narula, L., Iannucci, P.A., et al. (2021). “GNSS Interference Monitoring from Low Earth Orbit.” Navigation: Journal of the Institute of Navigation, 68(1).
NASA JPL. (2024). “NISAR L-band SAR Technical Specifications.” NASA/ ISRO SAR Mission Documentation. Closas, P., Fernández-Prades, C. (2023). “GNSS Interference Detection and Mitigation: A Survey.” Signal Processing, 206.
Focusing on timing synchronization, the project is supported by ESA NAVISP on behalf of the Swedish National Space Agency to advance resilient timing and positioning.
Net Insight has been awarded a development project through the European Space Agency’s Navigation Innovation and Support Program (NAVISP), a European program designed to foster innovation in the PNT domain and strengthen Europe’s technological competitiveness.
The project, co-funded by the Swedish National Space Agency, aims to accelerate the development of robust positioning, navigation and timing (PNT) technology, to address growing societal needs and increase risks to critical infrastructure.
Precise timing signals are a critical component of everything from telecommunications and 5G networks to transportation and energy systems. Traditionally, GNSS systems such as GPS and Galileo have been the standard for time synchronization. However, today’s geopolitical landscape and the increasing prevalence of disruptions such as jamming and spoofing highlight the need for robust, complementary solutions that can ensure reliable operation under all conditions, according to Net Insight.
“This initiative exemplifies how the Swedish space industry can contribute to addressing complex European challenges related to critical infrastructure,” said Christer Nilsson, vice director general of the Swedish National Space Agency. “Combining Swedish technical excellence with European collaboration is a powerful model for strengthening robustness and operational reliability within PNT.”
“Society depends on technologies that are not only advanced, but also robust and operationally reliable, and capable of withstanding disruptions and external interference,” said Per Lindgren, group CTO and head of synchronization at Net Insight. “With this project, we are strengthening the development of solutions that can deliver reliable time synchronization even under demanding conditions, thereby securing critical infrastructure for the future.”
Through collaboration with the Swedish National Space Agency and ESA’s NAVISP program, the project gains access to both national and European funding and support for research and development in PNT technology. At the same time, it enables national initiatives to be aligned with broader European strategies for robust and operationally reliable PNT architectures.
NAVISP is designed to stimulate new technologies and applications beyond traditional GNSS-based systems and plays a key role in Europe’s efforts to ensure robust and competitive PNT solutions.
The UK Hydrographic Office (UKHO) hosted the UK’s first cross-government geodesy, positioning, navigation and timing working group in October. Representatives from 19 government bodies shared insight on the risks, opportunities and interdependencies linked to PNT systems, including GNSS.
On Nov. 19, the UK announced a £155M investment in PNT. The working group will continue to support collaboration and exchange knowledge as further resilience actions progress, according to the UKHO.
GNSS supports critical activities across the UK economy. It provides accurate location and timing for communications, maritime and aviation safety, and the smooth running of power and financial networks. As threats to space-based systems grow, improving national resilience is increasingly important.
“The UKHO’s expertise in geodesy plays a key role in helping the UK understand and protect PNT services. Our specialists provide trusted positioning and timing advice across defense and civil programs, including supporting the safety of navigation in UK waters,” the agency said.
“It is fantastic to hear that the work with eLoran, GNSS Interference Monitoring Programme, Space Based Time Transfer and the National Timing Centre have received ongoing funding,” said Joe Pearce, senior geodesy and PNT specialist, UKHO. “This funding will assist both our data collection and the mariner. It will protect and assist future geodesy and PNT, improving resilience as these systems come increasingly under threat.”
Iridium Communications is working with T-Mobile to on a broad network deployment of positioning, navigation and timing (PNT) services, starting with live-site activations across the United States. The deployments will deliver 5G network complementary timing synchronization to strengthen the cellular network’s resilience and help ensure reliability for customers.
The U.S. Department of Transportation CPNT Action Plan is designed to evaluate mature and commercially available CPNT technologies to strengthen PNT resilience and enhance the safety of critical infrastructure, like 5G networks. DOT is the U.S. government’s civil lead for PNT.
Under the contract, T-Mobile will expand its installation of Iridium PNT receivers to 90 additional live 5G network sites in geographically diverse locations. Iridium PNT will help protect against GPS disruptions that cause downtime and compromise the data integrity and performance of 5G networks, which rely on coordinated, precise timing to deliver the necessary speed, capacity and reliability of service to end-users.
T-Mobile will also perform nominal and adverse user equipment exercises at its indoor testing range. It has the necessary wireless infrastructure for DOT, Iridium, and T-Mobile to observe and record results.
Capable of sub-100-nanosecond accuracy — better than a millionth of a second — and secured using cryptographic techniques, Iridium PNT signals are 1,000 times stronger than GNSS systems like GPS and work inside buildings with no need for an outdoor antenna. The service is delivered by Iridium’s low-Earth orbit (LEO) satellite constellation, which provides global weather-resilient L-band connectivity.
GNSS simulation has evolved well beyond accuracy testing. It now covers full-spectrum NavWar and PNT validation. Today’s simulators are expected to generate real-time GNSS, LEO signals, inertial measurement units (IMU), alternative navigation sources, jamming and spoofing — all from a single system.
“The number of signals continues to grow with the rise of multi-PNT sources and advanced threat capabilities,” said Jaemin Powell, senior product manager, NavWar & Simulation at Safran Federal Systems. “Our customers are preparing for GPS-denied operations, validating NavWar responses and ensuring resiliency in contested domains.”
Powell noted that Safran Federal developed BroadSim Genesis to enable simultaneous streaming of L1, L2, L5 and L6 GNSS and LEO signals with integrated jamming and spoofing — all within a compact 4U platform.
The company’s strategy is built on a software-defined architecture, allowing for rapid adoption to evolving threats and mission requirements, Powell said. Safran Federal collaborates closely with government stakeholders and defense primes to stay up-to-date with new requirements and incorporate real-world threat vectors, such as spoofing and jamming. The BroadSim platform supports software upgrades for every feature, from adding constellations and LEO signals to enabling hardware-in-the-loop (HIL) support or integrating additional PNT resources.
While defense and aerospace continue to serve as core markets, rising demand also is coming from space companies, LEO-PNT developers, and advanced electronic warfare laboratories now relying on Safran simulators.
“These users value the scalability, fidelity and flexibility of our simulation solutions, especially in environments with high dynamics,” Powell said. “They are looking beyond traditional GNSS, and we address that need with a simplified, all-in-one platform.
Large-Scale Simulation
“Large-scale simulation is technically demanding,” Powell added. “Generating thousands of signals across multiple bands with ultra-low latency and 1000 Hz update rates pushes both hardware and software boundaries.”
Maintaining the intuitive Skydel interface while adapting to evolving NavWar requirements remains a top priority for the company. For example, Safran Federal introduced real-time automated calibration for BroadSim Wavefront, which executes before every scenario. This allows users to power up and immediately begin testing, eliminating recalibration and setup delays.
“Simulation is more than just signal generation. It is about enabling operational confidence,” Powell said.
“Our platform gives users the ability to stress test systems, visualize behavior in real time and adapt quickly without relying on range time or live sky testing…We are enabling teams to meet their toughest NavWar and PNT challenges with confidence and flexibility. If you have demanding requirements, we are ready to deliver a solution that is intuitive, capable and built for the future.”
Australia’s Defence Science and Technology Group (DSTG), part of the Australian government’s Department of Defence, has selected Adtran’s Oscilloquartz high-performance optically pumped cesium clock to support research at its Adelaide facility.
The OSA 3300 HP will serve as a time and frequency reference for positioning, navigation and timing (PNT) research. Delivered in collaboration with local partner CoverTel, the deployment marks the first integration of optical cesium technology within Australian defense research.
“DSTG’s selection of our optical cesium reflects a broader shift toward autonomous, long-term synchronization solutions,” said Stuart Broome, GM of EMEA and APAC sales at Adtran. “Defense organizations around the world are reassessing how they ensure timing resilience, particularly as reliance on GNSS becomes more of a risk.”
The OSA 3300 HP will give national infrastructure precision and adaptability, supporting DSTG’s research into new strategies for assured PNT. DSTG selected the OSA 3300 HP to support advanced PNT research within its Sensors and Effectors division.
Using optical pumping technology that measures 100 times more atoms than traditional magnetic cesium clocks, the device delivers outstanding frequency stability and precision, Adtran said. Its all-digital design ensures consistent performance, while its 10-year operational lifespan offers long-term value.
With its compact form factor, robust construction and advanced atomic technology, the OSA 3300 HP provides the reliability needed to support Australia’s evolving synchronization requirements and critical scientific initiatives.
The clock will help DSTG explore new approaches to synchronization and build greater resilience into the Australian Defence Force’s long-term PNT capabilities, especially in contested environments where GNSS jamming and spoofing are prevalent. It will lay the groundwork for systems that rely on precise, dependable timing — from secure defense communications to advanced sensing and navigation.