Geoscience Australia has released Ginan V4, the latest version of its home-grown, open-source toolkit for precise point positioning.
Developed under the Positioning Australia program, Ginan V4 delivers world-class GNSS capabilities to innovators, researchers and industry professionals.
Version 4 features a new intuitive graphical user interface (GUI) that makes data processing faster, easier and more accessible. The new GUI was designed to lower the barrier to entry for users across sectors. With simple data loading and streamlined output downloads, the new interface enables anyone — from navigation specialists to disaster response teams — to harness centimeter-level accuracy without needing advanced technical expertise.
Ginan V4 also introduces enhanced robustness and improved software formatting, reducing errors and accelerating processing speeds. Users can expect smoother workflows and reliable results, whether calculating orbital mechanics or pinpointing precise locations on Earth’s surface.
Ginan V4 remains fully modular, empowering users to build their own capabilities depending on their needs. From surveying and geospatial analysis to emergency response and scientific research, the toolkit supports innovation across diverse applications.
Key benefits of Ginan V4
User-friendly interface. Simplifies data loading and output generation.
Enhanced robustness and speed. Fewer errors, faster processing.
Modular design. Customize capabilities for orbital mechanics, surveying or disaster response.
GNSS accuracy. Centimeter-level precision based on satellite observations.
Free and open source. Available to download via Geoscience Australia’s GitHub.
As part of Positioning Australia’s suite of capabilities, Ginan V4 reflects Geoscience Australia’s commitment to delivering GNSS capabilities that support innovation, safety and productivity. By making the software free and open source, the program ensures that Australian expertise continues to drive global advances in positioning technology.
Ginan V4 is available for free download on Geoscience Australia’s GitHub. More information can be found at ga.gov.au/positioning.
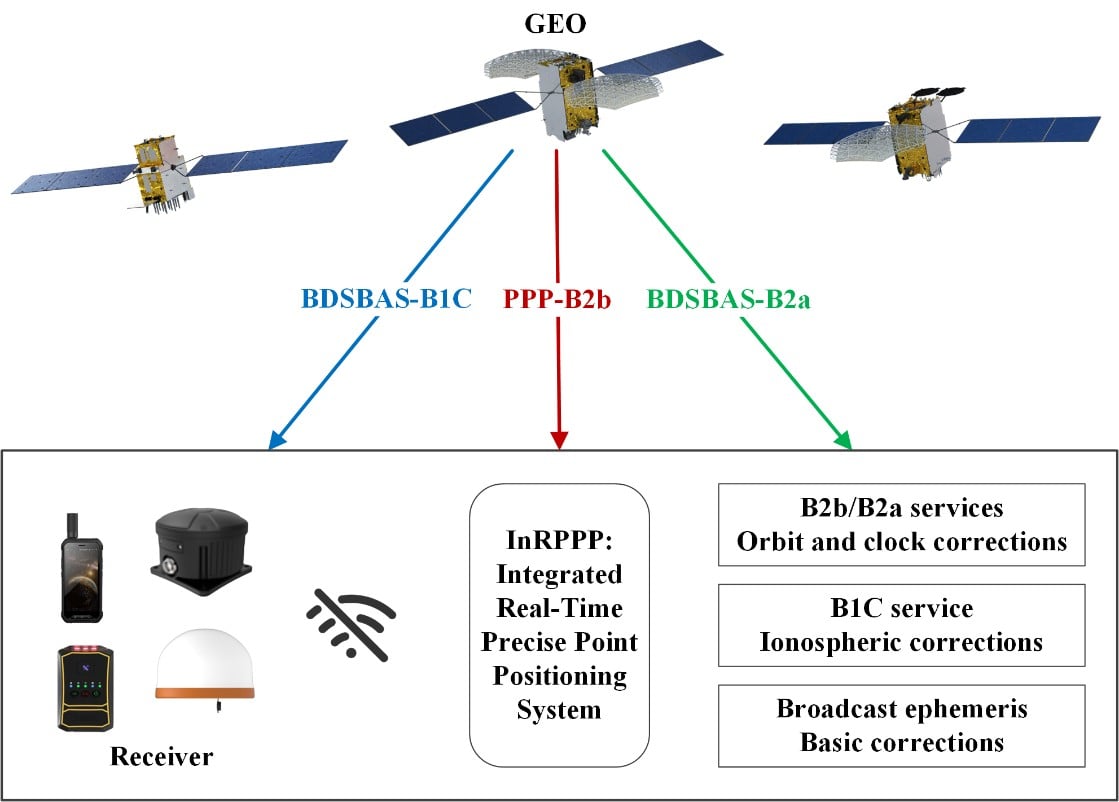
The development of an Integrated Real-Time Precise Point Positioning (InRPPP) system leveraging BeiDou Navigation Satellite System (BDS) B2b, B2a, and B1C services has significantly enhanced satellite-based positioning accuracy.
By resiliently utilizing these augmentation messages, the InRPPP system corrects satellite orbit and clock errors and mitigates ionospheric delays, outperforming traditional methods. Experimental results from both static and kinematic conditions demonstrate superior performance, showing improved positioning accuracy, faster convergence times, and greater stability in challenging environments. This breakthrough offers potential for applications in real-time navigation, precision positioning, and disaster monitoring, with a broader impact on industries requiring reliable and continuous positioning data.
The implications of the InRPPP system are vast, with applications spanning multiple sectors that depend on high-precision satellite navigation.
Satellite-based navigation systems, like the Real-Time Precise Point Positioning (RTPPP), are crucial for many industries that require accurate location data. However, these systems face limitations in areas with weak Internet connectivity or signal interference. BeiDou’s satellite augmentation services, namely B2b, B2a, and B1C, have emerged as a promising solution.
Yet, integrating these services into one cohesive system for optimal performance remained unexplored. This study pioneers the Integrated InRPPP system, which integrates all three services including correcting satellite clock, orbit errors, and ionospheric delays, unlocking new levels of positioning accuracy. The results from this research address critical limitations in current satellite-based positioning technology, setting the stage for real-world applications in complex environments.
In a 2025 Satellite Navigation publication (DOI: 10.1186/s43020-025-00172-x), researchers from the State Key Laboratory of Geo-Information Engineering and Key Laboratory of Surveying and Mapping Science and Geospatial Information Technology of MNR, State Key Laboratory of Spatial Datum, and Hohai University introduced the InRPPP system, a new approach that leverages the B2b, B2a, and B1C services of the BDS.
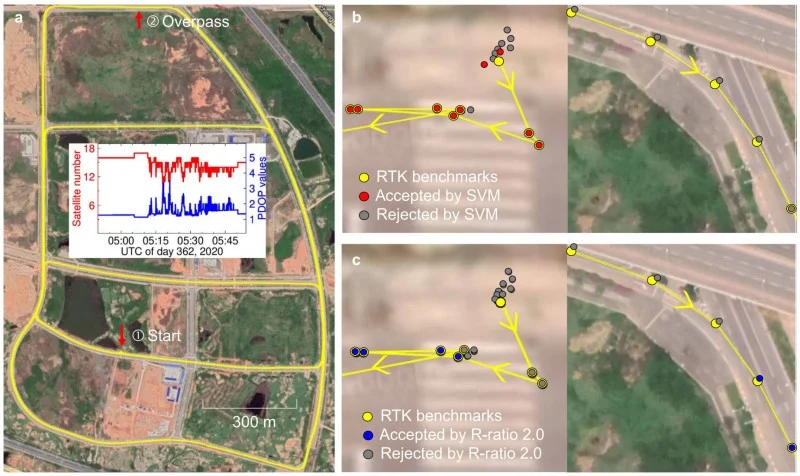
Scenes of the static experiment. The left and right panels denote the west and south sides of the station. (Photos: Study authors)
By combining these services, the InRPPP system corrects satellite orbit and clock errors while mitigating ionospheric delays. With enhanced accuracy, stability, and faster convergence times, this system has the potential to transform satellite-based positioning, offering more reliable and continuous service in real-time applications, especially in environments where traditional positioning systems struggle to perform.
The InRPPP system brings a new level of precision to satellite navigation by combining the best of BeiDou’s B2b, B2a, and B1C services. Through this integration, the system corrects satellite orbit and clock errors with B2b and B2a services, while B1C handles ionospheric delays. This resilient approach allows the system to deliver superior performance, even in high-occlusion or remote environments. The static experiments showed the InRPPP system surpasses other methods, with a 59.6% improvement in positioning accuracy and a 65.9% reduction in convergence time compared to using B2b, B2a, or B1C individually.
In dynamic conditions, the system demonstrated enhanced stability and reduced signal interruptions, achieving up to a 34.3% improvement in accuracy. The integration of these services increases the number of visible satellites, enhancing the Position Dilution of Precision (PDOP) values and ensuring better satellite geometry. This integrated approach not only improves accuracy but also ensures continuous, reliable solutions, making it a game-changer for fields like geodesy, navigation, and disaster monitoring.
Academician Yuanxi Yang of the Chinese Academy of Sciences, the lead researcher behind the InRPPP system, remarked, “The ability to integrate multiple BeiDou augmentation services into a single real-time positioning system represents a major breakthrough. By leveraging B2b, B2a, and B1C, our system offers a more reliable and accurate solution than anything available today. In both static and kinematic tests, the InRPPP system has outperformed traditional positioning methods, demonstrating its robustness and resilience in environments where signal conditions are far from ideal. This system is already applied in real applications and has potential to reshape industries reliant on satellite navigation and positioning.”
The implications of the InRPPP system are vast, with applications spanning multiple sectors that depend on high-precision satellite navigation. From autonomous vehicles and precision agriculture to disaster management and geospatial services, the enhanced accuracy and stability offered by InRPPP can support real-time decision-making in critical environments. This system also promises to improve the resilience of navigation systems in regions with poor satellite visibility or signal interference. As technology advances, the InRPPP system could pave the way for even more robust solutions, advancing global sustainability goals and improving disaster response capabilities by offering uninterrupted, reliable positioning data.
Launched in 2003, Canada’s Precise Point Positioning (PPP) service, CSRS-PPP, continues to solidify its place as a world-class GNSS post-processing platform. Operated by the Canadian Geodetic Survey (CGS) under Natural Resources Canada (NRCan), the service enables users to obtain highly accurate coordinates from raw GNSS data without requiring proximity to a base station. Users simply upload RINEX observation files from either static or kinematic receivers, and CSRS-PPP returns positions referenced to NAD83(CSRS) or the International Terrestrial Reference Frame (ITRF). Crucially, this free and publicly accessible service is contributing enormously to the democratization of centimeter-level GNSS positioning for users around the world.
Galileo PPP-AR Now Supported
On May 14, 2025, CGS released a major upgrade to the service that introduced support for GalileoPPP with Ambiguity Resolution (PPP-AR). This new capability applies to Galileo E1/E5a signals recorded on or after November 27, 2022, and is available when using either Rapid or Final products. These “products” refer to high-precision satellite data; specifically, calculated information about satellite orbits, clock corrections, and signal biases, based on data collected by a global network of stations. The collected data are processed by NRCan and international partners to support CSRS- PPP’s precise positioning outputs. The recent CSRS-PPP upgrade builds on the PPP-AR support for GPS added in 2020 for data recorded on or after January 1, 2018, marking a significant step toward fully integrated, ambiguity-resolved positioning using data from multiple GNSS constellations.
Why PPP-AR Matters
The major milestone in October 2020, when ambiguity resolution was introduced to the CSRS-PPP platform, ushered in a new era of precision for users. At the core of PPP-AR is a significant shift in how satellite signals are interpreted. Traditional PPP estimates carrier-phase ambiguities as ‘float’ (real-valued) parameters because the integer number of whole carrier wavelengths between satellite and receiver remains unknown and unresolved. In contrast, PPP-AR resolves these ambiguities as fixed integers by utilizing precise satellite orbit and clock products alongside detailed modeling of satellite and receiver biases, thereby enabling reliable integer ambiguity resolution. This leap in algorithmic refinement leads to faster convergence times and enhanced accuracy, often down to the centimeter level. Ambiguity Resolution can lead to particularly noticeable improvements on east–west accuracy, which makes PPP-AR particularly valuable in applications demanding high horizontal precision.
CSRS-PPP Advances: Broader Satellite Support and Richer Output Data
Since its inception, CSRS-PPP has evolved steadily. Alongside expanded satellite constellation support, the platform’s reference frame has progressively advanced through updates from ITRF2005 to subsequent realizations, culminating in the adoption of ITRF2020. Additionally, CSRS-PPP output files now include valuable metrics such as estimated tropospheric delays, receiver clock offsets, and ambiguity resolution statistics. These enhancements provide users with more detailed insights into solution quality.
Meeting Growing Demand
Canada’s geodetic services continue to experience strong growth, with an increasing number of users relying on the CSRS-PPP service and related geodetic tools for essential positioning information. According to the Surveyor General Branch Annual Report for 2022–2023, file retrievals through CSRS-PPP and related tools increased by 45% in 2022 compared with 2021. Between 2022 and 2023, CGS supported over 11,000 active users and processed close to 1.3 million files across its suite of geodetic products and services.
An Evolving Platform
Even as this article was being written, on July 15, 2025, CSRS-PPP announced support for GPS signals C1L, L1L, C1X and L1X, further enhancing its capabilities and reaffirming its role at the core of a modern geodetic infrastructure. As GNSS shifts toward multi-frequency, multi-constellation services, CSRS-PPP is evolving in parallel, making centimeter-level accuracy accessible to a wider user base. With robust algorithms and enriched data outputs, CSRS-PPP remains a critical tool for high-precision positioning in Canada and a model for international GNSS services.
High-precision GNSS applications, such as real-time displacement monitoring and vehicle navigation, rely heavily on resolving carrier-phase ambiguities. However, traditional methods like the R-ratio and W-ratio tests often use empirical thresholds, which can lead to unreliable results due to biases and environmental variability.
These limitations hinder the efficiency of Precise Point Positioning Ambiguity Resolution (PPP-AR), especially in dynamic or challenging conditions. Based on these challenges, there is a pressing need to develop more robust and adaptive techniques for ambiguity validation.
Published (DOI: 10.1186/s43020-025-00167-8) on June 9, 2025, in Satellite Navigation, researchers from the Royal Observatory of Belgium and the State Key Laboratory of Precision Geodesy in China unveiled a Support Vector Machine (SVM)-based method for GNSS ambiguity validation.
The study leverages machine learning to combine multiple diagnostic metrics, achieving higher accuracy and reliability than conventional approaches. The model was trained on extensive datasets and validated through real-world experiments, showcasing its potential to transform high-precision positioning.
The study’s key innovation lies in its integration of seven diagnostic metrics — including R-ratio, ADOP, and ambiguity dimension — into an SVM model. This approach addresses the limitations of traditional methods, which often rely on single thresholds and fail to account for complex dependencies among variables.
The SVM model achieved an 92% success rate in ambiguity validation, outperforming the R-ratio test’s 82% in kinematic scenarios. Notably, the model reduced convergence time prediction errors to just 1.0 minute, compared to 5.0 minutes for conventional methods.
Highlights of the research include:
Enhanced Reliability. The SVM model’s ability to adaptively weigh multiple metrics ensures more consistent ambiguity resolution.
Real-World Validation. A vehicle-borne experiment demonstrated a 92% success rate, proving the method’s practicality in dynamic environments.
Scalability. The framework is adaptable to both single- and multi-constellation GNSS systems, broadening its applicability.
Despite its advancements, the study acknowledges a 5% error rate in unresolved ambiguities, pointing to future research directions, such as incorporating variance-covariance data for further refinement.
“Our SVM model represents a paradigm shift in ambiguity validation,” emphasized Jianghui Geng, co-author of the study. “By harnessing machine learning, we’ve not only improved accuracy but also provided a scalable solution for diverse GNSS applications, from autonomous vehicles to geodetic monitoring.”
The SVM-based method holds significant promise for industries requiring ultra-precise positioning, such as autonomous navigation, aerospace, and infrastructure monitoring. Its ability to shorten convergence times and enhance reliability could revolutionize real-time GNSS applications, particularly in urban or obstructed environments where signal interruptions are common.
Future iterations of the model, incorporating additional data layers, could further bridge the gap between theoretical precision and real-world performance, setting a new standard for GNSS technology.
Since the dawn of GPS, researchers have worked to improve the accuracy of estimated positioning, navigation and timing (PNT) from the receiver-derived pseudorange, carrier-phase and Doppler measurements. While the pseudorange-based accuracy of standard point positioning (SPP) at the level of 1s to 10s of meters sufficed for most users, carrier-phase-based relative positioning, real-time kinematic (RTK), network RTK (NRTK) and precise point positioning (PPP) measurement processing techniques were developed to provide decimeter-to-centimeter-level PNT under various constraints. Of these approaches, PPP — generally based on the state-space reduction of measurement errors to a single GNSS receiver from a wide area calibration network — has evolved dramatically. Why should readers read this article, as PPP has been around for some two decades? Well, some communities may consider old performance specifications of conventional/classical PPP, a rather niche technology, for static use with post-processing of measurements, resulting in tens of minutes for solution convergence to the decimeter level. However, there have been many performance advances, with more coming, affecting who uses the technology and how.
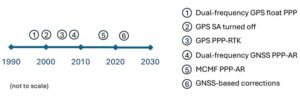
Figure 1: Timeline of PPP evolution.
Figure 1 illustrates the timeline of PPP evolution, from:
The development of the original technique in the late 1990s to reduce static GPS network measurement processing load.
The removal of GPS Selective Availability (SA), simplifying precise satellite clock prediction.
The development of PPP-RTK, in which regional RTK-derived corrections are used to reduce position convergence time and increase accuracy.
Successful isolation of PPP GPS dual-frequency carrier-phase ambiguities to increase accuracy.
Full multi-constellation, multi-frequency (MCMF) processing to greatly reduce position convergence time.
The introduction of GNSS constellation provider corrections. (Individual advances will be discussed in the Elements section.)
From initial scientific uses to becoming the commercial standard in remote areas or regions with limited GNSS terrestrial infrastructure, these research contributions are leading to ubiquitous open sky decimeter to centimeter-level positioning with a range of available corrections, increasing accuracy and reducing initial convergence for more applications.
Essentials
In the late 1990s, to improve positioning accuracy over SPP and avoid the heavy computational burden of network-adjusted relative positioning processing between many receivers, PPP algorithms (detailed in the Elements section) were formulated with undifferenced measurements between tracked satellites and a single receiver (Zumberge et al. 1997). Both pseudorange and carrier-phase measurements are utilized, with the former presenting many decimeter-level references and the latter ambiguous centimeter-level ranging. By filtering continuously tracked measurements over time, decimeter- to centimeter-level positioning is possible, as the state terms, including real-valued estimates of biased carrier-phase ambiguity terms — resulting in tens of minutes to hours of initial convergence time. This approach represents Hatch filtering in the position state rather than the observation domain. Key to PPP is the use of precise satellite orbit and clock estimates derived from a global reference network, which can receive measurements from an entire GNSS constellation. Additionally, to maximize performance, remaining error sources are modeled or estimated. While PPP was initially not as accurate as RTK and, more importantly, took tens of minutes to hours to attain solution convergence, the technique did not have the terrestrial infrastructure constraints of RTK or network RTK, which require reference receivers ~10 km to 15 km and ~75 km away, respectively. Once GPS Selective Availability was turned off in 2000, GPS satellite clock modeling became simpler and more accurate, and scientific and commercial PPP solutions quickly became the standard measurement processing technique for applications requiring decimeter-level accuracy in remote areas or places where it was not economically viable to install (an) RTK base station(s).
In the 2000s, two different approaches were developed to deal with the shortcomings of PPP: PPP-RTK and PPP-AR. In PPP-RTK, state space corrections from a regional NRTK solution are efficiently transmitted and applied as PPP corrections. As NRTK resolves carrier-phase ambiguities and estimates local atmospheric (ionospheric and tropospheric) refraction and reference station position all in a least-squares sense, PPP-RTK can produce centimeter-level positioning in seconds within a reference station network, where stations can be tens to hundreds of kilometers apart. In PPP-AR, the ionosphere-free linear combination of dual-frequency pseudorange and carrier-phase measurements is not employed; rather, the uncombined version, and the pseudorange and carrier-phase observation models, are extended to include and isolate satellite and receiver fractional carrier-phase biases, allowing PPP ambiguity resolution (AR) to integers with additional satellite code and phase biases from the network solution and between satellite single-differencing. Both approaches are having significant scientific and commercial success.
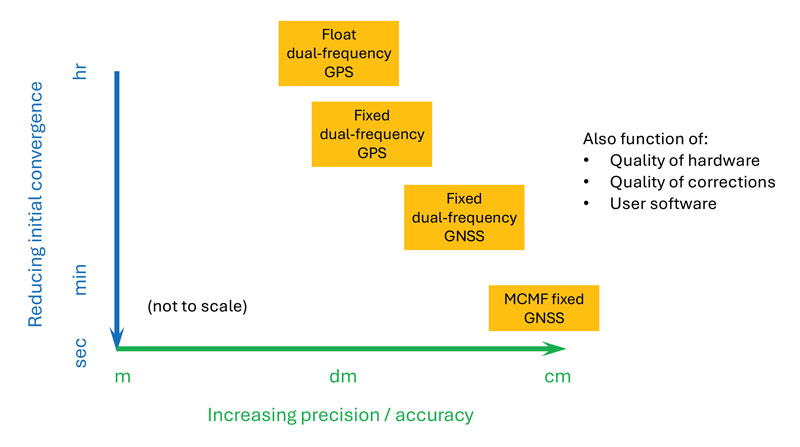
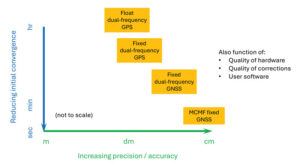
Figure 2: PPP and PPP-AR technology evolution in terms of accuracy versus convergence time.
Unlike RTK, which has the benefit of significant additional calibration information from the reference station, PPP(-AR) must rely only on satellite-based corrections and the strength of the single-receiver observations. In recent years, additional GNSS constellation satellites and frequencies have been brought on-line in large numbers, and GNSS constellation-provided PPP corrections have begun (Xu et al. 2021; Fernandez-Hernandez et al. 2022; Naciri et al. 2023). These developments have greatly increased estimation redundancy, making near-instantaneous PPP without regional reference stations possible (Naciri and Bisnath 2023). This evolution of PPP technology in terms of positional accuracy versus convergence time is illustrated in Figure 2. Therefore, it may be possible to a) dissolve the old GNSS duality of niche, professional-grade versus mass-market, low-cost hardware and software with low-cost hardware utilizing PPP (and RTK and PPP-RTK) software countermeasures to obtain precise PNT; and b) with PPP corrections from GNSS constellations, perhaps, as a reversion to SPP, to have PPP be the natural operational mode of precise GNSS PNT (Bisnath 2020).
Elements
Theoretical development
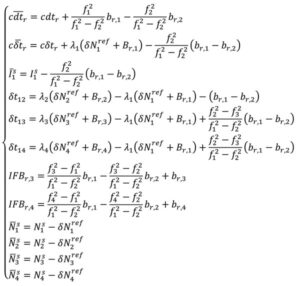
The PPP measurement processing technique utilizes the GNSS pseudorange (code) and carrier-phase (phase) observables. For receiver r and satellite s, the respective code and phase measurements on frequency can be defined as:
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
In order to eliminate ionospheric refraction, the original PPP solution forms the ionosphere-free (IF) linear combination of the dual-frequency GPS code and phase measurements:
From this combined form, the IF float PPP equations are (Kouba and Héroux 2001):
where the terms with tildes are biased by other terms from the starting observation equations, but allow for enough redundancy for user position, receiver clock offset, a zenith tropospheric term and real-valued, biased phase ambiguity terms to be estimated. In a sequential least-squares or Kalman filter optimal estimation process, positional accuracy depends on the quality of the satellite orbit and clock corrections, along with applying additional error modeling (including satellite and receiver antenna phase center offset and variation, solid Earth tides, ocean loading and phase wind-up), and, most importantly, the quantity, geometrical distribution and quality of the code and phase measurements. The state is initialized with m-level pseudorange measurements and slowly converges to the centimeter-level over tens of minutes to hours as the real-valued, biased phase ambiguity estimates reach steady state. This original or classic PPP solution, characterized by slow convergence to a fixed ambiguity-like positioning solution, may be what some in the community still think of as PPP.
PPP-RTK was developed as a means to remove these shortcomings of classical, float PPP by supplying PPP-like error state corrections from a regional RTK network to allow near-instantaneous carrier-phase ambiguity resolutionAR, (AR), solving both PPP’s convergence and accuracy problems (Wübbena et al. 2005). Significant operational improvements include increased spacing between (N)RTK reference stations, so less GNSS terrestrial infrastructure is required, and significant reduction in data transmissions from observation space representation (OSR) to state-space representation (SSR). By providing regional atmospheric corrections and ambiguity fixing, RTK-like performance is achieved but with larger CORS spacing. This approach has found commercial success in economically sustainable regions.
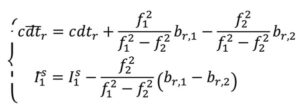
In parallel, active research continued in PPP-AR, given its desirable characteristic of not requiring regional reference stations. Multiple solutions were developed (e.g., Collins et al. 2008; Ge et al. 2008; Laurichesse et al. 2009), each of which reformulated the PPP observation equations to isolate the phase ambiguities, while overcoming datum defects in the estimation process. For example, the decoupled clock model (DCM) (Collins et al. 2008) isolates the phase ambiguities and directly estimates them as integers. The DCM does not make any assumptions regarding receiver biases and uses separate terms for code and phase clocks due to the imprecision in their synchronization — hence the model’s name. Satellite code and phase biases are required, along with satellite orbit and clock corrections. Then, standard AR methods, such as LAMBDA, can be applied. In the DCM, the fundamental code and phase equations are altered to:
where dtr, and δtr, are the receiver code and phase clocks, respectively. The receiver pseudorange bias br,i is parameterized in such a way that it is grouped into the receiver pseudorange clock forming dtr and ionospheric delay forming I . These terms are derived to be:
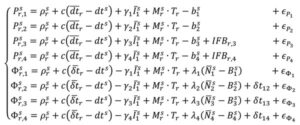
Through substitution, the DCM dual-frequency observation equations become:
In decoupling the receiver clocks, the carrier-phase measurements lose their datum. To remove the estimation singularities, one satellite is selected as the reference satellite, its ambiguities are fixed to arbitrary integer values and used for between-satellite single-differencing. N = N + δN , where N are the arbitrarily set integer ambiguities on frequency i and δ N are the differences between the actual integer ambiguities and the arbitrarily set ones. Carrier-phase cycle slips must be detected and changes to the reference satellite accounted for. While initial solution convergence is still a characteristic of uncombined, dual-frequency PPP-AR, the uncombined model solved the problem of brief data outages (solution re-convergence), as the slant ionosphere estimates are used as a bridging parameter between small data gaps.
The dual-frequency model can be expanded to, e.g., quad-frequencies for multi-constellation, multi-frequency (MCMF) PPP-AR. Accounting for the use of a reference satellite per constellation, accounting for any spatial and temporal reference system differences between constellations, and additional inter-frequency pseudorange biases (IFBs) the up to quad-frequency DCM formulation can be derived as:
with:
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
Results and analysis
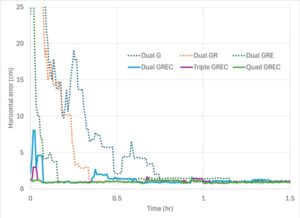
Figure 3: PPP-AR horizontal positioning error for various combinations of GNSS constellations and number of frequencies showing average initial convergence for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day of year 128 in 2024. Results presented are the average of 24 hours of data, reset every three hours.
How has PPP positioning solution convergence and accuracy evolved? The above model is now used to illustrate the performance of MCMF PPP-AR with up to four frequencies. The quad-frequency model has been implemented in the York-PPP client engine developed at York University. For performance illustration purposes, Centre national d’études spatiales (CNES) MCMF correction products are used for consistency and one day (day of year 128 in 2024) of high-quality MCMF GNSS observations are used from each International GNSS Service (IGS) stations CUSV in Bangkok, Thailand, KIR8 in Kiruna, Sweden, and RABT in Rabat, Morocco. Note that data from other days and other comparable stations produce similar positioning results. Simulated real-time, sequential least-squares, kinematic processing was performed for the following observation scenarios: 1) dual-frequency GPS (dual G); 2) dual-frequency GPS and GLONASS (float), with no ambiguity fixing of the frequency-division, multiple access GLONASS signals (dual GR); 3) dual-frequency GPS, GLONASS and Galileo (dual GRE); 4) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 5) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 6) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Operational effects, such as correction latency, are not considered. Figure 3 demonstrates MCMF PPP-AR horizontal error initial solution convergence for these scenarios, averaged from each 24-hour dataset, reset every three hours across the three global stations.
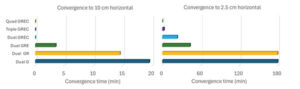
Figure 4: PPP-AR horizontal positioning convergence times for various combinations of GNSS constellations and number of frequencies to 10 cm and 2.5 cm for data used in Figure 3.
The dashed time series in figure show the benefits of adding constellations in the PPP-AR processing. From the average of the dual-frequency GPS solutions, the addition of each constellation reduces convergence time by approximately one-half. Then, by adding additional frequencies, convergence time is further reduced to basically instantaneous convergence using available measurements on up to four frequencies from all four GNSS constellations. These results bode well for GNSS data collection in sky-obstructed areas or with lower-quality hardware. Figure 4 provides the convergence times for the average solutions from each processing scenario to reach and sustain below 10 cm and 2.5 cm horizontal error, respectively. These are typical specifications for numerous static and kinematic applications. Four constellation, dual-frequency data are required to attain 10 cm horizontal positioning error or better near-instantaneously. However, to achieve the 2.5 cm convergence definition, at least triple-frequency data are necessary. The post-10 cm convergence horizontal solution accuracy, as defined by rms error, is 9 cm for dual-frequency GPS and 1 cm for each of the GREC processing scenarios. The post-2.5 cm convergence horizontal solution accuracy, as defined by rms error is 17 cm for dual-frequency GPS and 4 cm for each of the GREC processing scenarios.
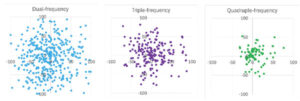
Figure 5: MCMF PPP-AR horizontal positioning error for dual-frequency GNSS (left), up to triple-frequency GNSS (center) and up to quadruple-frequency GNSS (right) for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day-of-year 128 in 2024. Results are epoch-by-epoch solutions in the north and east directions in centimeters with 8,640 position estimates in each scenario.
What if a more robust PPP solution is considered that also further analyzes the introduction of additional frequencies? The same three-station, one-day dataset can be processed in an epoch-by-epoch mode, where all filter states are reset. Therefore, there is no filtering with no assumptions about system dynamics. In this case, using a 30-second sampling rate, results in 8,640 position estimate “snapshots” — a robust process of estimation that can be useful for, e.g., clearly defining integrity for safety-of-life applications. The MCMF PPP-AR results for 1) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 2) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 3) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Figure 5 illustrates the epoch-by-epoch horizontal positioning performance (in cm) for these three scenarios using planimetric subplots. Most position estimates for each scenario are near each subplot center. Adding measurements from the additional frequencies from the dual-frequency base to up to three frequencies and then up to four frequencies for the same four constellations greatly improves horizontal positioning precision and greatly reduces the quantity and magnitude of positioning outliers.
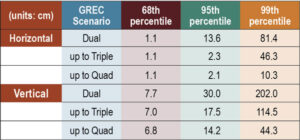
Table 1: MCMF PPP-AR positioning error for 68th, 95th and 99th percentiles (in cm) for data used in Figure 5.
Table 1 provides the epoch-by-epoch MCMF GNSS PPP-AR horizontal and vertical 68th (1-sigma), 95th (2-sigma) and 99th (3-sigma) percentile positioning error statistics for the same dataset. At the 68th percentile, all scenarios produce centimeter-level horizontal and sub-decimeter-level vertical positioning. However, at the 95th percentile, only triple- and quad-frequency processing can produce centimeter-level positioning in the horizontal component and near decimeter-level positioning in the vertical. To assess extreme position estimate outliers, the 99th percentile statistics show that dm-level horizontal positioning can be maintained with quad-frequency processing.
Table 2: Average estimation redundancy for data used in Figure 5.
The MCMF PPP-AR filtered results indicate that near-instantaneous, cm-level PPP is achievable with quality geodetic observations. The epoch-by-epoch, unfiltered results imply that robust, centimeter-level PNT is achievable. Table 2 provides the average redundancy in the epoch-by-epoch processing, where the redundancy is the difference between the number of measurements used and the estimation states. This measure provides insight to how the increase in the number of measurements, while not increasing the number of satellites or the dilution of precision, significantly improves PNT estimation performance for PPP-AR — as this is a measurement-driven technique. The average redundancy increases from 34 to 62 when expanding from dual-frequency GPS to dual-frequency GPS + Galileo and to 121 when using dual-frequency measurements from all constellations. Additionally, increasing processing to include up to triple-frequency measurements and quad-frequency measurements grows this metric to 154 and 183, respectively. The estimation process then becomes more robust against measurement errors and biases. It has more measurement strength to estimate all state parameters, including slant ionosphere refraction terms and integer ambiguities, allowing for improved position estimation precision.
Evolutionary
MCMF PPP-AR performance continues to improve. Positioning performance for quality geodetic measurements can produce horizontal centimeter-level positioning performance nearly instantaneously. Robust performance can be obtained with epoch-by-epoch processing, resulting in centimeter-level and few-centimeter-level horizontal and vertical positioning at the 95th percentile level using up to quadruple frequency measurements. Also, inclusion of additional measurements from additional frequencies greatly improves estimation redundancy, thereby improving state estimation.
Future research developments, testing and implementation include: adding measurements from available fifth frequencies; investigating less reliance on noisy and multipath-prone pseudorange measurements; expanding robust near-instantaneous PPP in urban environments; further defining/characterizing PPP integrity and safety integrity levels; having PPP be an independent or complimentary solution to/with (N)RTK for precise PNT; minimize requirements for atmospheric corrections; further use of PPP in mass-market hardware; and further integration of PPP as part of sensor suite solutions (e.g., automotive, smartphone, UAV, robotics, etc.) for resilient PNT.
Finally, what is the usefulness of the research in our lives? PPP measurement processing for GNSS is the scientific and industry standard for many user applications. There continues to be growing commercial adoption of this evolving technology, including expanded use in traditional (N)RTK precise applications, mass-market applications using low-cost hardware, and safety-of-life applications, including automotive, other passenger vessels, smartphones, robotics, UAVs and for aids to pedestrians.
Tallysman Wireless and u-blox have partnered to develop PointPerfect precise point positioning real-time kinematic augmented smart antennas.
The ZED-F9R high precision GNSS and the NEO-D9S L-band receivers from u-blox have been integrated with Tallysman’s technology. The product integration will provide accuracy and precision.
The multi-band (L1/L2 or L1/L5) architecture removes ionospheric errors, and the multi-stage enhanced XF filtering improves noise immunity while relying on the dual-feed Tallysman Accutenna element to mitigate multi-path signal interference rejection. Some versions of the new smart antenna solutions include an inertial measurement unit (dead reckoning) and an integrated L-band corrections receiver to ensure operation beyond terrestrial network reach.
The PointPerfect GNSS augmentation service is now available in North America, Europe and parts of Asia Pacific.
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.
The earliest article about GPS and agriculture that I found in my collection of this magazine(*) is from the July/August 1992 issue: “Using GPS in Agricultural Remote Sensing,” by Eileen M. Perry of the Remote Sensing Research Laboratory of the USDA Agricultural Research Service. Thirty years later, you cannot buy a tractor from a major manufacturer that does not come equipped with a GNSS-based guidance system, and precision agriculture routinely makes use of remote sensing data and geographic information systems (GIS). The data are collected by Earth observation satellites, manned aircraft, UAVs and sensors on farm machinery. The GIS are used to collect, manage and analyze these data and create maps for the variable-rate machines to follow when seeding, irrigating, spraying fertilizer, herbicide and pesticides, and harvesting.
In this cover story, managers at Trimble, Tallysman Wireless, and ComNav Technology give their perspective on precision agriculture. Additionally, Gavin Schrock explains recently introduced options for tiered precise point positioning (PPP) services, using Trimble’s CenterPoint RTX as an example.
Proponents of precision agriculture and equipment vendors have always claimed that it reduces inputs (water, seeds, fertilizer and pesticide) and environmental impacts while increasing yields and profits. However, I have never been able to find any independent, reliable and comprehensive study of precision agriculture’s return on investment. If you are aware of any, please let me know, at [email protected].
— Matteo Luccio, Editor-in-Chief
Check out these perspectives on precision agriculture:
* I have the entire collection of GPS World’s print edition, except for the first issue, the 10 issues in the second year (1991), and the September through December 1993 issues. I would be thrilled to receive those missing issues, or facsimiles, from anybody who has them.
Correction services enable farmers to pinpoint where to apply fertilizers so as not to waste any. (Image: artiemedvedev/iStock/Getty Images Plus/Getty Images)
Growing among the many options for GNSS corrections open to precision agriculture operators are tiered precise point positioning (PPP) services. Agriculture has had integrated GPS, and now GNSS, for decades. Ranging from individual RTK bases, networks of RTK bases and network RTK (RTN) to dedicated L-band satellite-delivered PPP, operators have been able to receive and apply the appropriate corrections for different crops and applications, from centimeters to meters.
Part of the appeal of such services, particularly for large agricultural concerns with mixed crops and operations, is having the full flexibility of tiered precisions. Additionally, near-global coverage has increased utilization.
“Specialty and high value crops require high accuracy,” said Michael Helling, senior director of strategy for Trimble’s autonomy group. “For instance, when drip tape is laid for fruits and vegetables, you would not want subsequent activities to be off more than an inch or so, to avoid cutting it. This is where RTK was essential, and a base was often set up, or an RTN accessed. But the RTX [Trimble’s PPP delivered by L-band satellites] high-precision option, CenterPoint RTX, easily meets those needs.”
Like some other PPP correction services, Trimble’s RTX also has lower precision subscription options: RangePoint for 15 cm and ViewPoint for 30 cm pass-to-pass accuracy. These services are also utilized outside of agriculture. For example, CenterPoint, delivering centimeter precision, is utilized for certain surveying and construction applications and FieldPoint for asset mapping. Trimble has also developed embedded solutions, based on the same core technology for, among other things, maritime, robotics, autonomous vehicle, and assisted driving applications.
Certainly many agriculture applications can suffice with lower precisions, such as broadacre crops, where there may be no need to maintain row-to-row and year-to-year repeatability. Where some amount of overlap between passes is acceptable, coarse navigation at sub-meter to meter precision may be all that is needed. However, as Helling notes, precision becomes addictive, and as the field equipment becomes more capable of positionally topical functions, many operators are stepping up in levels of precision.
“Farmers are more precisely testing fields with all kinds of sensors and seeing where the field actually differs in soil and nutrient content,” said Helling. “There are different approaches and value propositions. One is saying I need to fertilize this area better so that I can get a better yield. There are also situations where a specific area of the field might only produce to a certain level. Farmers can pinpoint where those areas are to apply fertilizers so as not to waste it and optimize their bottom line.”
For many agriculture applications, the reality is that you have a tractor pulling some other piece of equipment through a field.
“Think about sprayers, forever behind a tractor,” said Helling. “Our equipment can control a lot of things around the rate, precisely targeting specific pieces of a field or row. When you start thinking about sustainability, being able to turn the spray on and off where you’ve already sprayed, you can avoid overspray.”
Sensor integration helps automate the process.
“We just aquired a company in France called Bilberry; their technology is very effective at identifying weeds. You can identify what’s in the field and can decide how you’re going to treat it. The next immediate steps in automation for agriculture might not be full autonomy, but more automation in the equipment that’s being pulled, and sensors that inform what they do.”
Tallysman antennas provide a critical link in the field for autonomous and semi-autonomous farm equipment. (Image: Kinwun/iStock/Getty Images Plus/Getty Images)
How do you define precision agriculture?
Precision agriculture includes all such modern technological advances as precise GNSS, robotics (autonomous vehicles, UAVs), sensors, and GIS that enable improved crop production by soil/field management and minimize the use of energy, seed, herbicides, pesticides and fertilizer.
What have been the key turning points in the development of precision agriculture?
There have been four key precision agriculture developments over the past 25 years. First, field mapping, which enables yield monitoring and the directed application of seed, fertilizer, herbicide and pesticide. Second, precision GNSS, which enables the same plus crop row offset from year to year. This offset, in turn, makes it possible to distribute the plant root system and utilize nutrients in different locations in the field, as well as to minimize soil compaction by ensuring that wheels do not travel over the same row from year to year. Third, autonomy, including UAVs and autonomous vehicles. Fourth, sensors to monitor moisture and water levels, and to identify weeds and plants.
What are the specific requirements and challenges of precision agriculture for GNSS, and how do they differ from those of other kinds of mapping and machine control?
Many precision agriculture applications require L-band corrections, which are typically broadcast from a geostationary satellite 35,800 km above the equator. The distance from the broadcast satellite to the user increases as the user travels either north or south of the equator. At the same time, the elevation angle decreases and at ~70° north or south of the equator the geostationary satellite will be seen at the horizon. As a result, at northern and southern latitudes, the L-band correction signal is seen at a low elevation angle and it is very weak because it has travelled a long distance. Tallysman has designed the VSS6037L antenna to receive L-band signals seen at low elevation angles.
When did Tallysman Wireless begin to focus on precision agriculture and why?
In September 2019, Tallysman Wireless released the VSS6037L agriculture and machine control GNSS antenna. Most GNSS/L-band antennas on the market have significantly lower gain at low elevation angles. Common GNSS antennas will provide good geostationary L-band reception from the equator to approximately 55° north or south latitude. However, as the arrival angle gets lower, a common GNSS antenna will have less gain and it will be challenged to receive the L-band signal at higher latitudes. Tallysman designed the VSS6037L specifically to provide support for all latitudes and specifically low elevation angle L-band signals received by users north or south 55° latitude.
What are your relevant products/product lines?
Tallysman Wireless has several GNSS antennas and smart GNSS antenna product lines that are designed for precision agriculture. The TW3972XF (triple-band plus L-band) and VSS6037L (full-band plus L-band) are ideal precision agriculture antennas. Tallysman has recently released the TW5390, which is a smart GNSS antenna that uses the u-blox F9P chipset and supports its PointPerfect L-band augmentation service.
For farmers, every centimeter counts. ComNav’s AG360 Pro autosteering system controls pass-to-pass accuracy within 2.5 cm. (Image: Daniel Balakov/E+/Getty Images)
How do you define precision agriculture?
Precision agriculture uses new technologies to obtain as much as possible the unique characteristics of a field and input the correct amount of resources at just the right time. It is a system that needs to be implemented throughout the whole process of crop growth, including land preparation, tractor guidance, water management and weather monitoring. Tractors are used at every step, therefore it is critical to make them work consistently throughout the whole process, by using GNSS. ComNav Technology’s autosteering systems can be installed on most types of tractors. This allows farmers to grow the crops in a more autonomous and efficient pattern, which they can then save with high precision and reuse for later steps until harvest, increasing the utilization rate of land and decreasing the use of fuel, water, fertilizer and herbicides.
What have been the key turning points in the development of precision agriculture?
We have been in this sector since 2013. Our current solution is much easier to install and maintain and has higher accuracy and stability. The younger generation of farmers are more receptive to autonomous driving. They would like to try new things and set themselves “free” with technology.
What are the specific requirements and challenges of precision agriculture for GNSS, and how do they differ from those of other kinds of mapping and machine control?
The main challenges for autosteering systems include signal loss and terrain compensation. Most rural areas lack GSM coverages; therefore, in many countries using autosteering requires base stations. However, radio data links between stations far apart could be affected by obstacles, causing frequent correction outages. To compensate for this, ComNav has embedded in its GNSS module its “RTK-Keep” algorithm, which can maintain a relatively high-precision performance for autosteering during corrections outages. The system also must include various terrain compensation algorithms that identify a field’s elevation contours and provide smooth and continuous guidance even in complex terrains.
When did ComNav begin to focus on precision agriculture and why?
In 2013, we introduced our first high precision GNSS board. Initially, our main role was to provide it to integrators with expertise in precision agriculture. Over the years, the market began to boom in China and in 2016 we announced our first generation autosteering system for tractors. The main reason for us to focus on precision agriculture is the increasing demand from the market, which we believe will continue to grow in the foreseeable future due to the increasing demand for food from Earth’s growing population.
What are your relevant products/product lines?
In the past, workers in China drew lines on the land and then planted potatoes roughly along those lines, which was challenging and time consuming. It was hard for the farm owner to hire an experienced driver and guarantee the effectiveness of seeding. Now, however, ComNav Technology’s AG360 Pro autosteering system solves that problem by guiding vehicles according to set routines, including straight lines, curves, automatic turns and headline turns. Importantly, the pass-to-pass accuracy can be controlled to within 2.5 cm. The worker can finish multiple processes within only 24 hours, such as ridging, ditching, sowing, fertilizing and laying drip irrigation under mulch. Furthermore, compared to traditional manual planting, mechanized planting produces a more even sowing rate, which also establishes the foundation for the automated harvesting of potatoes. Potato production has increased by 10% per acre, land use has been reduced by more than 20%, and labor costs have been reduced significantly.
With the aid of Trimble’s correction services, the in-cab GFX-1260 display connects farmers to a wealth of knowledge about their fields and crops. (Photo: Trimble)
How do you define precision agriculture?
Precision agriculture is the use of technology in farming to increase yields through data and precision. Precision ag helps farmers improve yields by collecting data on all aspects of each plant to figure out exactly what it needs, when it needs it and how it will best survive. From planting, growing and cultivating to spreading, spraying and harvesting, precision agriculture allows farmers to monitor, measure and utilize data from beginning to end.
What have been the key turning points in the development of precision agriculture?
Accurate positioning is the enabler for all precision agriculture. RTK was one of the biggest initial developments within positioning as it allowed farmers a higher level of accuracy than had been seen previously. Precise Point Positioning (PPP) was the next big development. Our version of PPP, Trimble RTX, allows farmers the best of both worlds — RTK-level accuracy delivered via satellite, eliminating the need for base stations or sometimes unreliable radio, cell or internet signals. Though precision agriculture started with guidance, it has now made its way to implement-level, variable rate seeding and spraying and section control. ISOBUS has also been a big development in the past few years — allowing machines of all types to interact and communicate with each other, regardless of type, color and shape.
What are the specific requirements and challenges of precision agriculture for GNSS, and how do they differ from those of other kinds of mapping and machine control?
The challenge in GNSS is providing customers with the greatest availability in the field. While most fields are under open sky, obstacles such as trees and gullies make it more challenging. At Trimble, we provide market-leading pass-to-pass value with limited overlap for the customers at different price points. With our latest and most premium correction service, CenterPoint RTX, ease of use is also a key benefit.
When did Trimble begin to focus on precision agriculture?
Trimble unveiled its first agriculture receivers in 1999, signaling the start of the Trimble Agriculture division. In 2000, AgGPS Autopilot and automated steering systems were released for row crop application, further cementing Trimble’s presence in the precision agriculture community.
What are your relevant products/product lines?
Trimble offers technology integration that allows farmers to collect, share, and manage information across their farms, while providing improved operating efficiencies in the agricultural value chain. Trimble solutions include both hardware and software for guidance and steering, flow and application control, water management, harvest solutions, desktop and cloud-based data management, and correction services. Trimble’s CenterPoint RTX satellite-based correction service delivers GNSS positions repeatable to less than an inch. Combined with Trimble’s ProPoint GNSS technology, this service provides greater positioning availability, even in challenging environments such as tree lines, gullies and along contours where much of farming takes place.
For applications where centimeter-level accuracy is not as high of a priority, such as broad acre applications, Trimble RangePoint RTX and ViewPoint RTX give additional correction service options. They hold equipment to 6-inch and 12-inch pass-to-pass accuracy — or about the width of a tire between passing swaths. Trimble also offers Trimble VRS Now, giving farmers instant access to RTK positioning services using a network of permanent, continuously operating reference stations.