Today, Hemisphere GPS introduces the Vector VS330 and Vector VS131 GPS compass products that provide high performance heading, position, heave, and attitude data. The new Vector products are designed for professional marine applications such as hydrographic and bathymetric surveys, dredging, oil platform positioning, and buoys that demand a high level of 3D positioning accuracies.
Based on Hemisphere GPS’ Eclipse GNSS technology, Vector VS330 uses the most accurate differential corrections including RTK, L-band, SBAS, and beacon. The smart intelligence from our MFA firmware provides differential solutions by automatically switching to the next best differential source if the original source is no longer available, Hemisphere GPS said.
Vector VS330 is Hemisphere GPS’ flagship receiver and computes heading information with better than 0.01 degrees accuracy when using a 10-meter antenna separation. Positioning accuracy is better than one centimeter in RTK mode or four centimeters when using OmniSTAR HP corrections. Vector VS330 also provides five-centimeter RTK heave and 0.01 degree pitch and roll accuracies.
Combining Hemisphere GPS’ Crescent Vector and LX-2 receivers with two separate antennas, the Vector VS131 computes heading information with better than 0.03 degrees accuracy when using a five-meter antenna separation and better than 50 centimeter position accuracy when using L-band, SBAS, or beacon corrections. Vector VS131 accepts most differential correction signals for unparalleled flexibility to obtain sub-meter positioning in all regions.
The ruggedness of the new Vector enclosure also makes it suitable for more harsh environment installations like machine-control applications, including agriculture, heavy construction equipment, mining equipment, unmanned vehicles, cranes, and other machinery or industries that require very accurate heading and positioning solutions. The Vector’s versatility for providing heading, position, heave, and motion makes it directly compatible with the most popular hydrographic and side scan survey packages. Vector VS330 and VS131 include an intuitive and easy-to-follow user interface to facilitate fast installations.
“Vector VS330 and Vector VS131 are premium additions to Hemisphere GPS’ Vector series product line,” said Phil Gabriel, vice president and general manager, Precision Products, for Hemisphere GPS. “As the demand for more rugged and precise GPS equipment increases, we are meeting this demand by exceeding the accuracy of competitors’ products while being significantly more affordable.”
Vector VS330 and Vector VS131 will be featured by Hemisphere GPS in hall 9, stand B.62 at the INTERGEO Conference and Trade Fair in Hanover, Germany, from October 9-11. Both products will be available for shipping in November through the Hemisphere GPS Precision Products global dealer network.
The 9th European Conference on Precision Agriculture will be held in Lleida, Catalonia, Spain, July 7-11, 2013. The conference started on 1997 and takes place every two years in different locations around Europe. The proceedings of the conference are strictly edited to ensure the scientific quality of the event. The event is being held under the auspices of the International Society of Precision Agriculture (ISPA) and the Universitat de Lleida (UdL).
Hemisphere GPS has introduced Outback MAX with Outback ConnX — what it calls its “next-generation Outback Guidance system that redefines simplicity in precision farming.” Working seamlessly with Outback eDriveX with eTurns, the Outback MAX integrated display terminal provides a full array of features including section and variable rate control, Eclipse L1/L2 GPS and GLONASS guidance, and video support for up to four monitoring cameras, the company said.
Outback MAX also provides wireless connectivity via the Outback ConnX data management system to deliver real-time data access and management that is imperative for modern farmers. ConnX provides seamless data transfer between the Outback MAX terminal, office, and service providers ensuring efficient, accurate decision making and farming operations. ConnX can automatically import and export data, engage customer service with remote control capability, and simplify connection to RTK correctors. ConnX is compatible with popular data platforms including AgJunction, AgVerdict, NutriScription HD, OptiGro, and Precision.Ag.
“Hemisphere GPS has established a new level of innovation with Outback MAX that will substantially improve the accessibility and effectiveness of automated guidance and application control,” said Kip Pendleton, senior vice president and general manager of Agriculture at Hemisphere GPS. “The highly functional yet simple design of Outback MAX combined with the seamless connectivity between the field, office, and service providers greatly enhance the value that farmers can realize from precision farming techniques.”
Building on the functionality of company’s successful, the feature-rich Outback S3, the Outback MAX adds a host of new features: simplicity in design and operation, a powerful mapping engine, excellent screen clarity, seamless connectivity, and a rugged design that can operate in rough environments — features that are critical to achieving the benefits of precision farming. Outback MAX incorporates the ability to create shortcuts and favorites for the most commonly used tasks, facilitating a short learning curve with simple access to important features, getting farmers up and running quickly, Hemisphere GPS said.
A new method brings together advantages of real-time kinematic (RTK) and precise point positioning (PPP) in a technique that does not require local reference stations, while still providing the the high productivity and accuracy of RTK systems with the extended coverage area of solutions based on global satellite corrections. The real-time centimeter-level accuracy without reference-station infrastructure is suitable for many market segments — and is applicable to multi-GNSS constellations.
By Rodrigo Leandro, Herbert Landau, Markus Nitschke, Markus Glocker, Stephan Seeger, Xiaoming Chen, Alois Deking, Mohamed Ben Tahar, Feipeng Zhang, Kendall Ferguson, Ralf Stolz, Nick Talbot, Gang Lu, Timo Allison, Markus Brandl, Victor Gomez, Wei Cao, and Adrian Kipka
Real-Time eXtended (RTX) positioning is a technology produced by combining a variety of innovative techniques, which together provide users with centimeter-level real-time position accuracy anywhere on or near the Earth’s surface. This new technique is based on the generation and delivery of precise satellite corrections (that is, orbit, clocks, and others) on a global scale, either through a satellite link or the Internet. The innovative aspects of the new solution can be divided into different categories, which directly relate to the areas that have previously limited the provision of global high-accuracy positioning:
Because of various new aspects of the technique, RTX differs from both differential RTK and precise point positioning as currently understood by the general GNSS community.
System Overview
RTX technology is used to provide centimeter-level GNSS positioning through the CenterPoint RTX service. Figure 1 shows the general infrastructure of the system.
Data from monitoring stations distributed around the globe are collected and transmitted via the Internet to operation centers at different locations. The complete operation centers (enclosed by the red dashed square) are redundant in order to assure the very high (~100 percent) availability of the system. In case it is needed, the correction stream source might change between operation centers and/or processing servers within centers. These operational changes are handled in a deterministic way by all parts of the system including the user receiver. Inside the operation centers, redundant communication servers relay the network observation data to the data processing servers, which host the network processors that produce precise orbit, clock, and observation biases valid for any place on the globe.
After being generated, the precise satellite data are compressed in messages compliant with the CMRx format, specially developed for compact transmission of satellite information. The messages are finally routed to either a satellite uplink station or made available for Internet connection access by the users.
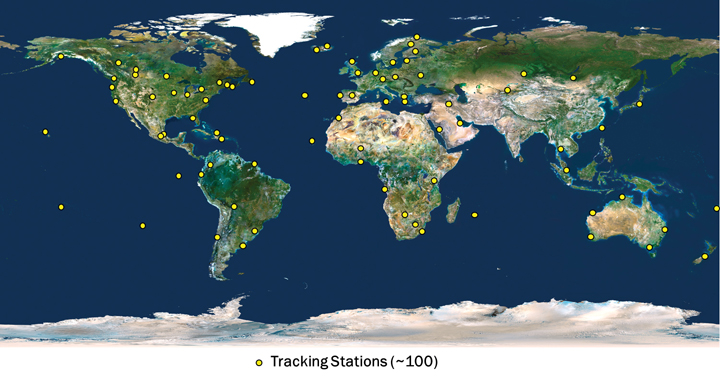
The CenterPoint RTX tracking network currently consists of around 100 stations, distributed across the globe, as shown in Figure 2. The CenterPoint RTX service is currently offered in North and South America, via satellite link, as indicated in Figure 3. Today the CenterPoint RTX service has been made available globally for all those with Internet access.
FIGURE 2. CenterPoint RTX tracking network distribution. (Click to enlarge.)FIGURE 3. CenterPoint RTX L-band satellite service coverage in the Western hemisphere.
Limiting Factors
To understand the limiting factors associated with global high-accuracy positioning, it is helpful to consider the simplified basic GNSS observation equations for carrier-phase and code measurements:
Φi=ρ+c(dT−dt)+T−Ii+λi Ni,
+Ai−ai+λi(WΦ−wΦ)+BΦ,i−bΦ,i+MΦ,i+nΦ,i
and
Pi=ρ+c(dT−dt)+T+Ii,
+Ai−ai+BP,i−bP,i+MP,i+nP,i
where:
Φi is the carrier-phase measurement for frequency i in meters;
ρ is the geometric distance between the antennas of the receiver and satellite in meters;
c is the speed of light constant in meters per second;
dT is the receiver clock error in seconds;
dt is the satellite clock error in meters per second;
T is the slant neutral atmosphere delay in meters;
Ii is the ionospheric delay for frequency i in meters;
λi is the carrier-phase wavelength for frequency i in meters;
Ni is the integer carrier-phase ambiguity for frequency i in cycles;
Ai is the combined receiver antenna offset and directional variation correction for frequency i in meters;
ai is the combined satellite antenna offset and directional variation correction for frequency i in meters;
WΦ is the receiver antenna phase wind-up effect, in cycles;
wΦ is the satellite antenna phase wind-up effect, in cycles;
BΦ,i is the carrier-phase receiver bias for frequency i in meters;
bΦ,i is the carrier-phase satellite bias for frequency i in meters;
MΦ,i is the carrier-phase multipath for frequency i in meters;
nΦ,i is the carrier-phase observation noise and other un-modeled effects for frequency i in meters;
Pi is the pseudorange measurement for frequency i in meters;
BP,i is the pseudorange receiver bias for frequency i in meters;
bP,i is the pseudorange satellite bias for frequency i in meters;
MP,i is the pseudorange multipath for frequency i in meters;
nP,i is the pseudorange observation noise and other un-modeled effects for frequency i in meters.
The feasibility of high-accuracy absolute positioning relies on the assumption that phase and code measurements on the different frequencies or on specific observation combinations are modeled quite reliably. This ultimately means that the parameters (or certain combination of them) of the two equations given are known very precisely, that is, with an accuracy of better than a few centimeters.
Having a global system where every component of the un-differenced GNSS observational model is well known requires advanced understanding and modeling of the involved GNSS-related effects. This is a general achievement of the RTX system.
(An extensive section here, encompassing satellite orbits and clocks, receiver clock error, antenna phase center odeling, phase wind-up effects, neutral atmosphere delay, and ionospheric delay, appears in the online version of this article, at env-gpsworld-integration.kinsta.cloud/rtx.)
Real-Time Network Processing
As previously stated, the RTX system works based on precise satellite information generated at processing centers and broadcast to users. The precise information employed by the systems comprises satellite orbits, satellite clocks, satellite biases, and other auxiliary information.
The requirements for the satellite orbits to be used in the global RTX system can be summarized as accuracy, continuity, robustness, and reliability. The satellite positions have to be accurate for obvious reasons, including the fact that orbit errors have direct impact on rover-position determination quality. Furthermore, because the RTX network process algorithms use ambiguity resolution, the reliability of the ambiguity determination is highly affected by the satellite orbits quality due to the distances between reference stations in the tracking network. The continuity requirement is put in place to avoid the need of handling observation modeling inconsistency over time for both network and rover processing.
For the same reason, the overall system employs techniques to properly handle switches between redundant orbit-processing servers without degradation of position quality. As one would expect, network processors have to be, in general, robust against the eventuality of poor data entering the system for various reasons. The RTX network processors employ a variety of quality-control techniques to ensure that only data with the highest expected quality is used for the computation of end products.
Finally, reliability is a very important factor for real-time orbit processing. At the current stage, the RTX real-time orbit processors are able to run for several months with virtually zero intervention from operators, while handling events such as satellites going through unhealthy periods and satellite maneuvers (during unhealthy period or not).
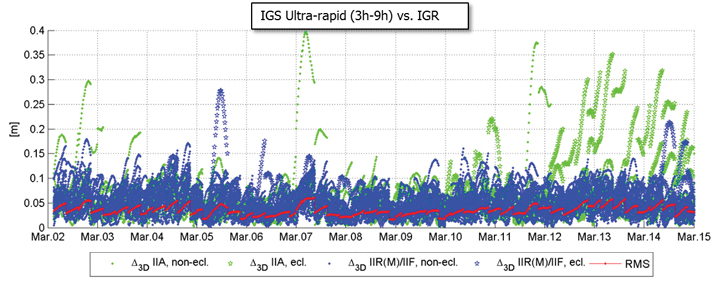
There are at least two strong reasons for justifying the need of implementing and running an RTX proprietary orbit processing server. The first one is simply the need of reliably meeting the above-mentioned requirements. The second one is that from an operational perspective, the RTX system is conceived in such a way that it does not rely on any external source of information to run at its full accuracy capability. Figure 4 shows the achieved orbit errors provided by IGS ultra-rapid products during two weeks of March 2011, where IGS rapid orbit products are used as truth. The ultra-rapid orbits are evaluated using the initial portion of the predicted arc, thus making use of the most reliable part of the predicted arcs as the products become available in real-time. In that case, neither accuracy nor continuity requirements for RTX processing are completely met.
FIGURE 4. IGS ultra-rapid orbit errors, as compared to IGS rapid orbit products.
Orbit Estimation. The orbit estimation in the CenterPoint RTX system is based on a combination of a UD-factorized Kalman filter estimating satellite position, satellite velocity, troposphere states, integer ambiguities, solar radiation pressure parameters, harmonic coefficients, and Earth-orientation parameters. The prediction step in the filter uses a numerical integration of the equations of motion in connection with a dynamic force modeling. Forces considered in the approach are: the Earth’s gravity field, lunar and solar direct tides, solar radiation pressure, solid earth tides, ocean tides, and general relativity.
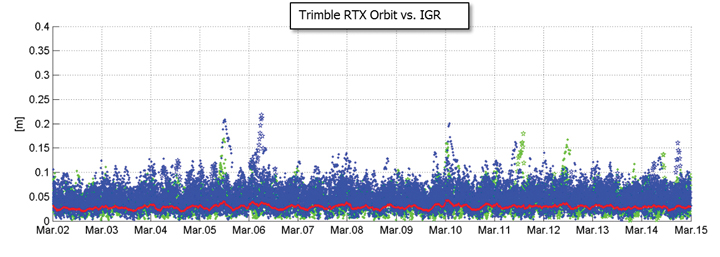
In RTX orbit processing carrier phase integer ambiguities are resolved in real-time. Also, the satellite orbit states are truly estimated in real-time and continuously adapted over time to better represent the current reality. This means that the satellite positions that are evaluated by the user have prediction times of no more than a few minutes since the last orbit processing filtering update, providing negligible loss of accuracy. Figure 5 shows the orbit errors obtained from the RTX orbit processor. Similarly to the previous figure, IGS rapid orbit products are used as reference. The time span is also the same as in the previous figure. The RTX real-time orbit components have a typical overall accuracy of around 2.5 centimeters (cm), and a 3D error accuracy of around 4 cm, considering IGS rapid products as truth.
FIGURE 5. RTX real-time orbit errors, as compared to IGS rapid orbit products.
Clock Estimation. Satellite clock estimation forms an essential part of the RTX system. It plays a fundamental role on positioning performance due to a number of reasons. Satellite clocks map directly into line-of-sight observation modeling, yielding into a one-to-one error impact from clocks into GNSS observables modeling. Due to the same strong relationship, it is of fundamental importance that clocks are generated in a way to facilitate ambiguity resolution within the positioning engine. The processing speed of a clock processor is also of critical importance, due to the fact that any delay in computing satellite clocks is directly translated into correction latencies when computing real-time positions on the rover side. For that matter, one should keep in mind that regardless how late satellite corrections get to the GNSS receiver in the field, positions have to be provided to the user as soon as the rover GNSS measurements are available. Therefore latencies typically introduce errors into the final real-time position. In this article, we define real-time positioning as the computation of positions at the time when the rover observables are available, regardless of the latency of the correction stream. This is a necessary concept in order to support dynamic rover GNSS positioning.
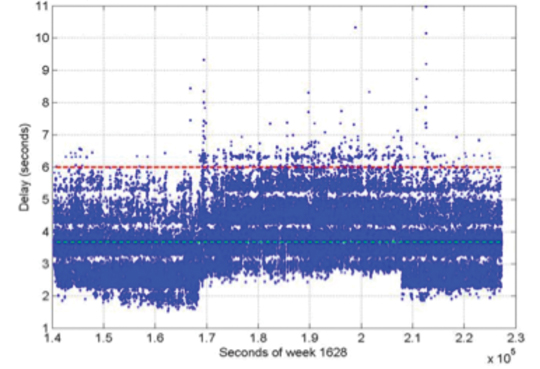
The RTX clock network processor was designed around the requirements discussed earlier. It computes clocks that are compatible with ambiguity resolution on the user receiver. As a matter of fact, the clock network processor itself employs ambiguity resolution for the generation of the RTX clocks. The processor architecture is based on an innovative design that allows processing data of several hundreds of reference stations, including all necessary steps such as data quality control, ambiguity resolution, and the final clock generation, within a fraction of second. The processing time of this kind of real-time network processor has to be minimized as much as possible in order to allow the processor to operate at 1 Hz, and to minimize the final correction latency at the rover end. Note that the final latency of the correction stream is a composition of three basic components: the time for the network data to arrive at the network processing server; the network processing time; and the correction transmission time to reach the final user. Figure 6 shows the typical total correction latency for the RTX system, when corrections are broadcast through a satellite link.
FIGURE 6. Typical RTX correction stream latency. The dashed green line represents the latency at 50 percent (3.7 s), and the dashed red line represents the latency at 99 percent (5.6 s).
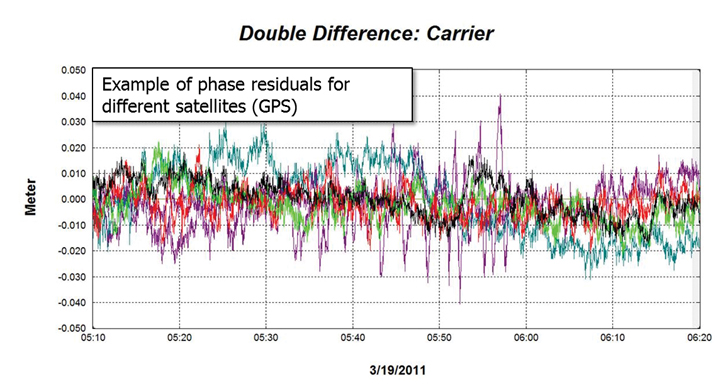
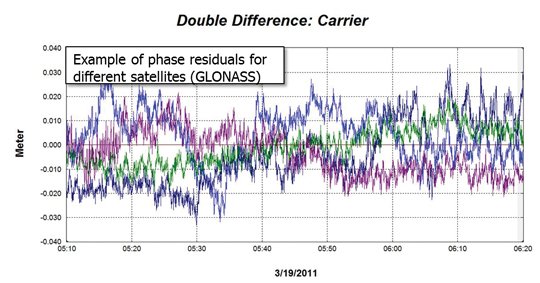
Unlike satellite orbits, satellite clock solutions are more difficult to compare directly. This is because different clock solutions might have offsets between each other, as well as behave differently due to differences in their GNSS reference time realization process as well as in their observation modeling approaches. That said, one way of verifying the quality of satellite clocks is to quantify how well it can be used to model actual receiver observation data. This can be in general achieved by applying satellite orbit and clock correction onto GNSS data and verifying the remaining residuals. Other quantities such as receiver coordinates have to hold their correct values for the residuals to be meaningful. In this case, the combined satellite orbit and clock error are assessed, and not just the satellite clock alone. For our purposes this is perfectly fine, since this is the way orbits and clocks are employed in rover positioning as well. Figures 7 and 8 show typical combined satellite orbit and clock errors at line-of-sight for different satellites. Figure 7 shows the ionospheric-free phase modeling error for GPS satellites, while Figure 8 is for GLONASS. Note that observations of a reference satellite (highest elevation at the time of observation) were reduced from the others. This was done in order to remove the receiver clock errors from the residuals. For both GPS and GLONASS cases, the observation modeling error after using RTX orbit and clock corrections is on average at the 1 cm level, with values typically less than 2 cm. The GPS satellite with outlying behavior in the plot below was setting at that time, and the increased amplitude of the residuals is mostly due to receiver observation errors such as multipath.
FIGURE 7. RTX clock quality (GPS) by means of corrected ionospheric-free phase measurements.FIGURE 8. RTX clock quality (GLONASS) by means of corrected ionospheric-free phase measurements.
Communication and Positioning
Once all satellite information is available, it must be compressed in a message that can be broadcast to the user in the field. The transmission of global corrections can be done in different ways, such as via Internet, in case the user has access to it, or using a satellite link. In the latter it is customary that corrections sufficient to cover the transmission satellite footprint are broadcast, rather than corrections complete enough to cover the globe. Firstly, because it is expected that users operating inside the satellite footprint will use the corrections only for that region, and secondly because bandwidth restrictions usually play a role in message design for satellite-based communication. The bandwidth restrictions not only enforce maximum bandwidth utilization below a certain limit, but also require that the utilization over time is homogeneous to ensure optimal usage of the satellite channel.
Furthermore, satellite signals are typically susceptible to frequent message-packet losses depending on the user environment, such as when a receiver is running under canopy. To mitigate packet losses, the message must be built in such a way as to allow the rover to continue operations with minimum loss of availability. In that case not only the message design has to foresee this type of situation, but also the message decoding, usage, and positioning algorithms have to be optimized to most favorably couple with the received messages. All these factors have been taken into account in RTX system communication design. A new message format was created to carry information on satellite orbits, clocks, observation biases, and other auxiliary information. The new RTX CMRx satellite messages deliver 1-millimeter resolution for satellite orbits and clocks.
The RTX positioning engine inherits several technological aspects from Trimble’s pre-existing RTK engine. This aspect makes the RTX positioning mode, and traditional RTK positioning modes (for example, single base, virtual reference station) easy to co-exist. Among other things, the new engine has been thoroughly tested and optimized for challenging tracking environments. In these scenarios the engine is presented with observation data collected with a high level of multipath and low signal-to-noise ratio, often producing cycle slips and gaps in the data. As previously mentioned, at the same time the correction stream also suffers packet losses and the correction data might not be completely available during certain masking conditions.
Positioning Performance. The RTX engine delivers typical final accuracies at 1–2 cm level for horizontal positioning, and 2–4 cm for vertical, 1-sigma. The final convergence of the system is achieved in 10 to 45 minutes after receiver startup. The time to converge might depend on several aspects, including satellite geometry and multipath conditions.
To overcome the increased convergence time as compared to traditional RTK systems, a number of features have been implemented as part of the RTX positioning engine, two of which are worthy of mention here. The Fast Restart feature allows users to power up or place the receiver at a known location and immediately obtain a converged solution. This is also applicable when users have not moved their equipment since the last RTX solution. This feature is quite valuable in agriculture applications, where the user typically does not move the tractor between RTX-steered field work activities, thus avoiding in the majority of cases the need to wait through a new convergence period before starting work, one or more days after the last system usage.
The second feature is also related to avoiding system re-convergence. The Bridging feature, an outage recovery capability, enables the RTX positioning engine to immediately recover from a complete constellation outage with loss-of-lock during any dynamic activity. This prevents the system from entering a new convergence phase in case the receiver loses track of up to all satellites in view, coupled with outages of up to a couple of minutes, such as when running behind a tree line, or under a bridge.
Accuracy
Horizontal position error obtained in real time in a receiver acquiring the RTX correction data through the satellite link in North America is shown in Figure 9. The receiver was running continuously for several days, and was located in Ames, Iowa. As displayed, the horizontal RMS was 1.4 cm, with a 95 percent horizontal error of 2.4 cm. These are typical values for satellite-based RTX horizontal performance.
FIGURE 9. RTX real-time horizontal positioning performance. Results obtained from a receiver operating in Ames, Iowa.
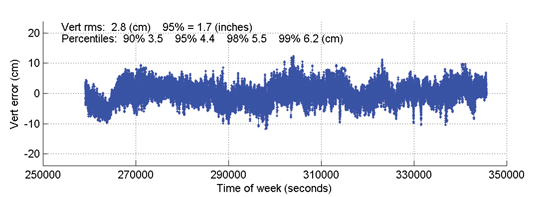
Figure 10 shows the vertical performance for the same receiver and time period: the vertical RMS was 2.8 cm, with 95 percent vertical error of 4.4 cm.
Time to Achieve Convergence. Convergence is directly connected to the level of productivity that can be achieved for actual field applications. In the following example a continuously powered RTX receiver was used to show an assessment of the RTX (re-)convergence capability. The receiver’s tracking of all satellites was disabled every hour by an antenna switch. Each outage lasted three minutes, during which times no GNSS satellites were tracked.
FIGURE 10. RTX real-time vertical positioning performance.Results obtained from a receiver operating in AMES, Iowa, US.
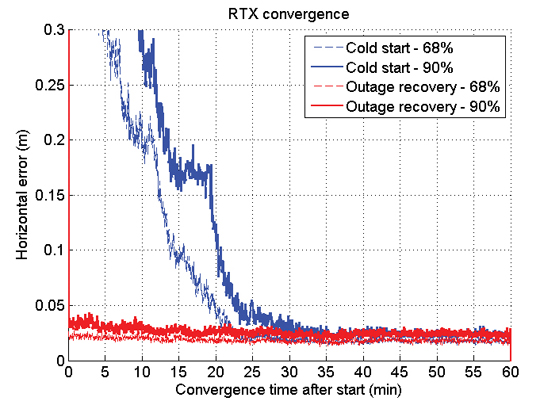
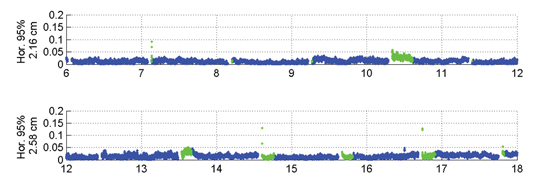
This procedure was repeated hourly for several days in order to gather enough performance runs to derive meaningful statistics. Figure 11 shows the resulting performance of this assessment. The standard cold-start re-convergence performance is indicated with blue lines, where the solid lines represent 90-percent performance and the dashed line represents 68-percent performance.
As the figure shows, the RTX system converged to better than 5 cm horizontal error after 20 and 25 minutes for 68 percent and 90 percent of the runs, respectively. Convergence time is correlated with a number of aspects, including satellite geometry and multipath environment. Because of these variations, the claimed RTX convergence time is between 10 and 45 minutes for full accuracy achievement.
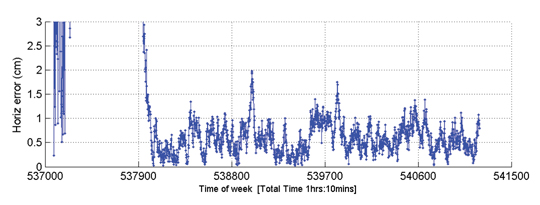
The red lines in Figure 11 indicate performance obtained with a second receiver, connected to the same antenna, and thus subject to the exactly same GNSS signal outages. This second receiver had the Bridging functionality enabled, and thus is expected to bridge the outages and phase cycle slips without resetting the positioning solution. The red lines confirm that the desired behavior is achieved. To better visualize what happens over time in this case, Figure 12 shows a few hours of the real-time results obtained with the receiver running with the Bridging functionality activated.
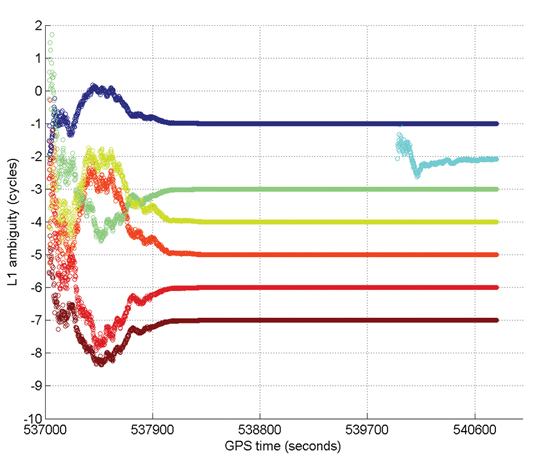
Figure 13 gives an example of Internet protocol (IP)-based RTX performance. This is a single run where the system converged to better than 5 cm (horizontal) in approximately 15 minutes. Figure 14 shows how the L1 ambiguities of individual satellites in view during that time converged.
FIGURE 13. RTX IP-based run example.FIGURE 14. Example of ambiguities convergence during an RTX IP-based run.
In these two plots, positioning convergence is, as expected, highly correlated with the ambiguities convergence to their final integer values in cycles. Note that satellites that come in after the overall solution is converged (for example, in light blue) achieve their final ambiguity values much quicker than during the position convergence phase, also as expected. The proprietary algorithms used for ambiguity resolution and validation in RTX allow the ambiguities to reliably converge to their integer values. Arbitrary integer number of cycles have been removed from the original ambiguity values to allow better simultaneous visualization of the ambiguities for several satellites.
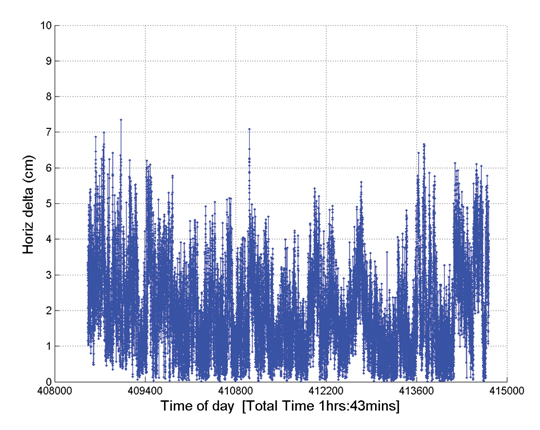
Optimizing the RTX system to work under different scenarios was necessary because the multipath and signal availability levels are reasonably different between running an antenna with a reference station setup and the actual user environment, where the data tracking conditions impose additional challenges on making high-accuracy positioning effective on a global basis, in a productive manner. Therefore, an extensive field test campaign was conducted during the pre-release phase of the RTX system. The next example shows RTX in-field performance for an precision agriculture application in Illinois. The setup is typical for agricultural use, with the antenna and receiver mounted on a tractor that ran for about 103 minutes. Figure 15 shows theactual track of the tractor; RTX corrections were received via satellite link.
FIGURE 15. RTX tractor field test track in Illinois.
The horizontal positioning performance for that field test can be seen Figure 16. The overall 2D RMS was 2.3 cm and the 95 percent horizontal error was 4.2 cm. Note that this position difference plot is between the RTX solution and a short-range single baseline (SBL) RTK solution providing truth. Therefore the numbers and plot actually show a combination of errors between the global RTX solution and the SBL solution to the local reference station.
FIGURE 16. Horizontal positioning results for a real-time RTX tractor field test in Illinois.
Nevertheless the error magnitudes achieved lie within the same range as in the previous assessments shown here.
Summary
RTX positioning brings together the advantages of positioning techniques that do not require local reference stations while providing the productivity of RTK positioning. Its deployment introduces innovations in GNSS network processing, as well as advancements in the rover global positioning algorithms.
RTX employs ambiguity resolution on a global scale for both network and rover processing, including GPS and GLONASS satellites in the solution. The delivery of this new technology is achieved through the CenterPoint RTX positioning service, capable of providing world-wide real-time centimeter-level accuracy without the direct use of a reference station infrastructure.
A longer version of this article was presented at the 2011 ION-GNSS conference in Portland, Oregon.
Rodrigo Leandro, Herbert Landau, Markus Nitschke, Markus Glocker, Stephan Seeger, Xiaoming Chen, Alois Deking, Mohamed Ben Tahar, Feipeng Zhang, Kendall Ferguson, Ralf Stolz, Nick Talbot, Gang Lu, Timo Allison, Markus Brandl, Victor Gomez, Wei Cao, and Adrian Kipka are members of the Trimble Engineering Team in Höhenkirchen, German
Trimble announced today that its high-accuracy, satellite-delivered CenterPoint RTX correction service is now available for farmers in Latin America.
Trimble CenterPoint RTX can deliver better than 3.8-centimeter (1.5-inch) accuracies in real time without the use of traditional reference station RTK infrastructure, the company said. Initially, the CenterPoint RTX satellite-delivered correction service covered approximately a 1.8 billion-acre swath of central North America, extending from Canada into northern Mexico. The new coverage area has been expanded to include all of Mexico, Central America, and South America, where farmers can use the GNSS correction service for cultivating, planting, pest and nutrient management, harvesting and water management.
"The expanded coverage of Trimble's satellite-delivered CenterPoint RTX service into Latin America further extends our broad portfolio of correction services, which also includes OmniSTAR VBS, HP, XP and G2; Trimble CenterPoint VRS; and the CenterPoint RTX service delivered via cellular communications," said Patricia Boothe, general manager of Trimble's Positioning Services Division. "By offering a suite of correction technologies and services, we can satisfy a variety of accuracy, delivery and budget requirements."
"We're committed to expanding the services and software applications that we provide to the global farming community. Increasing the coverage area for high-accuracy GNSS correction services for Trimble's agriculture customers around the world is an example," said Erik Arvesen, vice president of Trimble's Agriculture Division. "In 2011, we offered real-time, satellite-delivered corrections over a central swath of North America where it was well received. Now, farmers in Latin America can also benefit from CenterPoint RTX services to perform precision agriculture operations. Our customers want a broad range of solutions and with CenterPoint RTX, we're delivering those options."
Trimble CenterPoint RTX real-time corrections are satellite delivered directly to the GNSS receiver, so there are no additional costs for mobile data plans or hardware such as radios and antennas. The CenterPoint RTX service is compatible with the Trimble CFX-750 display, FmX integrated display, and the AG-372 GNSS receiver. The service is expected to be available by mid-July. For more information, visit www.trimble.com/agcorrectionservices.
The world population will soon need more food than we can currently produce. This article discusses some interesting GNSS agricultural innovations that have the potential for productivity improvements. Hemisphere, Septentrio, Case New Holland, and John Deere are all actively engaged in finding solutions using GNSS and are all overcoming technology and implementation limitations with new innovative approaches.
I’ve never felt entirely comfortable with GNSS in agriculture — basically because this is a specialized application area and discussion quickly turns to things like “yield, productivity, efficiency, costs, and inputs.” And if you haven’t lived in Iowa, or worked on a large acreage, or been employed by Deere — you just don’t have the vocabulary or the necessary technical background. But things have moved on in ag and all the technology is now basically enabled by GNSS, so maybe its time to take a new look.
It may be a good idea to try to understand the market drivers before we delve into the applications and who’s doing what. It seems that what drives Ag technology adoption is population growth. And people need food, and food production has to become more efficient for us to just keep up. If we can get 200 bushels (there’s another ag term) of crop per acre in a productive farm in North America, the challenge might be to improve how a typical small holding in India might move up from its current 20 bushels/acre by using ag automation. Or on a more global scale, over the next 50 years the world’s population is expected to require twice as much food, and a significant portion of this growth has to come from greater efficiency in food production from the same land.
So what are the technology drivers? It seems that auto-steer has been a major contributor, but GNSS accuracy improvements from decimeter wide-area networks, and more recently the widespread adoption of centimeter-level RTK, have improved machine guidance significantly. Then you have systems on tractors which can control these huge rigs and respond with complex “prescriptions” so field and crops alike specifically get what improves growth of specific crops. Gathering data as they proceed through these applications, farm databases are created and built upon, growing season after growing season.
Typical Asian farm operations.
Huge automated farm machine operating in North America.
I used to think that “down time” was a term more usual in the oil patch or in aviation, where high-value assets just cannot be left to idle because of a component failure or inadvertent human error. Down time for these huge ag rigs is big money nowadays, and systems are being constructed around their owners and farming customers to minimize non-productive time, lengthen their hours of productive use, and maximize the efficiency of the operation.
Hemisphere has been in the GNSS ag business for more than 20 years, and has evolved products from simpler mass-market light-bar guidance, folding in companies like Satloc, CSI, and Beeline technology and their applications, and growing its customer base in the process. As a consequence, ag systems opportunities in North America are now expanding into Brazil, Argentina, and elsewhere in South America where precision steering and application controls enable “controlled traffic” farming practices, variable rate input control, and simplification of high-value crop systems such as sugarcane where precise placement/spacing is required. An OEM partnership with Brazilian machinery manufacturer STARA has recently allowed integration of the eDriveX precision steering system and the A320/A321 dual-frequency RTK smart antenna with the STARA Topper 4500 application control terminal. Beyond South America, precision agriculture and automation is growing rapidly in China and Eastern Europe and is expected to ramp up over a much shorter period than seen in North America and Western Europe.
Hemisphere is tackling these opportunities with the Outback guidance series of products, which cover most of these different segments and degrees of Ag automation.
Outback S3 guidance display.
Outback AC110 automated rate and section control.
A321 RTK base station.
The Outback S3 combines a color touch screen with Crescent GPS receiver technology. This computer resource is at the core of the system where straight, contour, circle pivot, A+ direction guidance, and update B point is stored, controlled, and implemented. This display and control unit manages the automated steering system that drives the vehicle wherever the pattern requires and also controls automated section and chemical/fertilizer rate control. Automated section control is about preventing overlap and skip of inputs based on current GPS position and comparison with the vehicle’s actual location. Automated rate control is important for applying a constant rate of inputs regardless of changes in vehicle ground speed. Variable rate technology takes this a step further, allowing the system to automatically change the input rate as demanded by a stored application map related to field potential productivity zones. This program is customized for each farm/field and developed over time by gathering data on the growth of crops in response to various applications made in progressive growing seasons. This is where the real payback comes from in savings in previously wasted chemicals applied on the field — helps the economics of the operation, the efficiency of the application versus achieved crop growth, and minimizes the environmental impact of run-off.
RTK technology adoption is also growing in ag and machine control to enable centimeter-level vehicle steering to reduce skip/overlap and minimize soil compaction. In addition, RTK accuracy allows for new applications with accurate Z-positions such as water management and for better drainage, retention, and input management. For instance, more accurate elevation data can enable machine control for drain tile installation, surface ditch/drain installation, land leveling for even water distribution, and levee creation for irrigation retention. And accurate elevation maps combined with mapping layers for yield, soil-type and nutrient levels can give the grower a much clearer direction on how he may need to modify his input applications and drainage/irrigation strategy in order to maximize yield.
Hemisphere is clearly active in many phases of ag automation, including significant investments in the technology revolution which is bringing major changes to how automation can benefit farmers — but more about that later.
Septentrio in Belgium has also become involved in a number ag projects, mostly around the use of their AsteRx2eH dual-antenna receiver system.
Septentrio is working with customers who have applications in discrete crops such as flower bulbs, vegetables, and other ecological farming. These include mechanical weeding, which is needed in the very intensive and EU-controlled high-density farming in Western Europe. Designed to work with variable base-line lengths, this proven heading receiver continuously self-calibrates for antenna separation and has enjoyed success in many ag applications over the eight years it’s been in the field.
AsteRx2eH dual-antenna receiver.
Then a problem of receiver interference encountered in farming applications in Russia became a practical application for Septentrio’s Advanced Interference Mitigation (AIM+) technology.
Near Tuymen in Russia, a local farming community was equipping their equipment with high-precision (RTK) GPS systems for autosteer and precision-farming applications. They had also set up a local base-station to provide the required correction signals. However, when they were trying to bring up the service, rovers receiving data from this base-station were unable to obtain an RTK position. Equipping the base-stations with Septentrio AIM+ technology, and activating the adaptive notch filtering feature, largely suppressed the interference and cm-accurate positioning became possible.
Case New Holland (CNH), the manufacturer of Case IH and New Holland agricultural equipment, also recognizes the importance of GNSS-based solutions to the future of agriculture production. A growing population will require that more food is grown on an ever-decreasing amount of land. GNSS-based solutions are allowing producers to meet this challenge.
Case IH Steiger 400.
New Holland T9.
CNH is seeing increased adoption of GNSS automation that is driven by the positive impact that agricultural producers are seeing in their operations. CNH partners with producers by providing GNSS solutions necessary for the producer to employ agronomic practices such as “site-specific farming.” This method, combined with machine automation, can improve profitability by applying the exact amount of inputs needed for optimal crop production. With the increased use of GNSS, awareness of how fertilization inputs are applied is proving to be the most accurate prediction mechanism for crop yields and is also increasing the safety of how this is done.
CNH farm equipment comes with options for factory-installed GNSS-based system solutions such as guidance, yield mapping, and product application control. CNH is responding to increased customer demand by providing more extensive GNSS solutions.
Now, whenever anyone thinks of automation in agriculture, it’s impossible not to talk about John Deere. Deere has been in the business of providing automation solutions to farmers on its platforms using GNSS for 16 years. The company felt this was so important to future growth that it integrated its own GNSS company (Navcom) into the Deere family. RTK corrections provided by many dealer networks in the U.S. and the StarFire worldwide correction distribution system form the core infrastructure necessary for its machine automation systems.
The highly accurate SF3000 is the latest addition to the Deere in-house receiver line. It comes with integrated StarFire and RTK capability, and in keeping with the tractor and machine installations it will see, is extremely rugged and reliable. Currently with integrated GPS and GLONASS, Deere intends to upgrade it for Galileo when it becomes available.
Deere SF3000 ag receiver.
Deere AutoTrac.
Deere AutoTrac uses high-precision GNSS combined with six-axis accelerometers and gyroscopes to measure vehicle dynamics/attitude and to automatically control vehicle steering. This enables hands-off agricultural operations and leads to large improvements in efficiency and productivity.
Overall, Deere Ag automation is aimed at enabling precision planting, precision seeding, and minimizing overlap — it used to be meters of potential overlap between successive passes down a field with huge rigs; nowadays it’s a matter of inches. These advances improve productivity, optimize water usage, and lead to precision-enabled decision-making, which brings us to the next revolution in ag automation.
Over the past 15 years, users have been collecting data in a manual fashion from in-cab devices such as yield monitors and controllers found in combines, sprayers, and planters. Growers and agricultural service providers traditionally have put this data into desktop application software, making it difficult and time-consuming to maintain and share large amounts of data especially between an ag service provider and the grower.
Deere’s new approach is called John Deere FarmSight enabled by telematics, and Hemisphere has gone as far as buying a company called Ag Junction with similar capabilities to join in this new approach as to how data gathered during automated ag operations is used, and how future operations can be monitored and controlled.
If you put a radio link in the cab of the tractor and use it to connect the system on the tractor to a central server, say at a local dealer’s, then data gathered by the equipment during regular operations can not only be collected in real-time, but can also be analyzed to develop prescriptions for successive treatments. Connecting growers, fertilizer/chemical/seed retailers, agronomist, and machinery supports increasing efficiency and data movement in the ag cycle.
Of course, you can also monitor equipment location and discover that it’s broken or moved from the place it’s supposed to be, so maintenance can be scheduled and theft can be reduced. Everyone will want more real-time support, direct use of data, asset tracking, and all the bells and whistles that being connected can bring to ag operations.
A new era in ag automation for sure, that could hopefully go a long way to achieving those major productivity increases in food production that we all will need in the future. We’ll learn more details about GNSS and ag from several experts in a GPS World webinar which is planned for August 2. Please watch for further announcements from GPS World.
Across transportation, agriculture, industry, commerce, and finance, GPS has replaced earlier technologies, opened up innovative applications, and led to new ways of doing old things. GPS now plays a key role in the critical infrastructures of all industrialized nations, from the most sophisticated telecommunications system to the production of a simple loaf of bread.
Wheat is the world’s second staple food, and bread its main product. Bakers have been around for 30,000 years. GPS, among its manifold other duties, now also helps bring us our breakfast toast and midday sandwich.
British farmers sow 2 million hectares (5 million acres) of wheat per year, harvest 8 tonnes per hectare (3.6 U.S. tons per acre) and sell it at £150 a tonne ($214 per U.S. ton), making their harvest worth £2.5 billion ($3.9 billion). Nearly a billion pounds-worth ($1.6 billion) goes to make bread.
We use Britain as an example because we are British, but this same truth holds, at much grander scale, when you consider the United States, Russia, and many other European nations.
A vital value chain wends its way from farm to mill to bakery to store to home: in the UK, 99 percent of households buy bread, 99 percent of which is made in this country, 80 percent of it from domestic flour. This relatively closed value chain lets us see how GPS is used, and that its loss would increase the price of a loaf and translate into inflation.
GPS serves as the basis of the precision agriculture, cutting fuel costs and enabling selective and variable rate optimized application of fertilizers. It lets farmers use less manpower, reduces soil compaction, and even minimizes operator fatigue. Farmers now spend much more time on yield monitoring and within-paddock zone management than leaning on gates chewing straws. Though the capital cost of precision agriculture is high, the annual benefits are comparable with the investment. Losing GPS-based precision agriculture would increase the price of bread by at least 2 percent.
Transport logistics is the glue that joins our value chain together. GPS in fleet management optimizes routings, accelerates dispatching, prevents theft, improves driver behavior, and delivers fuel efficiencies. Loss of GPS in the transport links in our chain would increase fuel costs alone by 13 percent.
On top of all this, GPS is the ultimate source of precision timing supporting telecommunications links at every stage of the value chain, from wheat futures trading and banking transactions to voice, data, and Internet traffic.
The sudden loss of GPS in farming, transportation, communications, business management, and retail distribution, would substantially raise the price of bread, hit every household, and impact the national economy.
What applies to a traditional and at first glance low-technology product like bread applies across the board. The recent report on GNSS vulnerabilities by the Royal Academy of Engineering says that GPS and other satellite navigation services have applications so pervasive that there is now a real threat to global security if the systems should fail — or be interfered with. The signals are used by almost every industry: rail, road, aviation, space, maritime, agriculture, energy, surveying, construction, law enforcement and communications.
Dependence on GNSS connects many otherwise independent services into a so-called accidental system — with a single point of failure, the satellite signal. And a satellite signal, says the report, is a weak foundation for important services, since it can fail in dozens of ways.
GPS is no longer the only GNSS, of course, as many nations, recognizing its political and economic value, have developed their own systems, and augmentations to enhance accuracy and integrity. Over the next few years, the number of navigation satellites may approach 150. This will help reduce vulnerability to the loss of GPS and so will be a benefit in the short term.
But the long term is a very different matter. All these systems now use, or shortly will use, essentially the same technology. And, crucially, the same radio frequency bands.
In those frequency bands, GNSS is threatened by rising levels of radio interference. This threat has several strands that are being recognized separately and handled individually, but which taken together will determine the future of GNSS.
We face a Triple Whammy!
The First Threat
The first component of the Triple Whammy comes from the new satellite systems themselves. Each satellite transmitting in the GPS frequency band increases the noise level there. Satellite navigation receivers must find and lock onto the extremely weak signal that reaches the Earth, digging it out from the background noise of the cosmos. And the other GPS satellites add to the noise level.
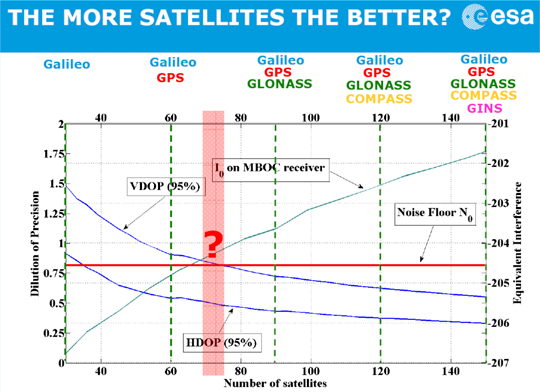
Günther Hein of the European Space Agency shows this remarkable diagram (Figure 1): as the number of systems increases and the number of satellites heads for that 150, up rises the noise they make, the blue-green line. More than about 70 of them, and satellite noise exceeds the cosmic noise floor in red and becomes the main source of noise. The more satellites, the worse the reception as GNSS interferes with itself. Too many satellites, and you’d pick up none at all! The first threat of the triple whammy is self-inflicted.
Chart: David Last and Sally Basker
Figure 1. The first threat of the Triple Whammy: new satellite systems. Source: Günther Hein.
The Second Threat
Conflicts between nations as their new GNSSs compete for radio spectrum also threaten GNSS viability.
The frequency bands available to satellite navigation are essentially L2, L5, and the principal one we use currently, L1. On L1, the European Galileo system and the Chinese Compass system occupy the same areas. Now, that’s very desirable if the two systems are to share receivers. But they also compete for that spectrum, and there is conflict between Compass and Galileo.
This battle for spectrum is a highly complex engineering problem. But chiefly, the spectrum wars are political, even emotional.
Chinese satellites fly across American skies broadcasting signals that interfere with European receivers. Spectrum wars have everything to do with relationships between nations and little to do with battles between engineers. They are developing into a classic tragedy of the commons: a situation in which self-interest determines how a limited resource — here the radio spectrum — is to be shared in a regime in which regulation is weak. The International Telecommunication Union sets standards and registers claims. The UN Office for Outer Space Affairs seeks to mediate. But neither is a policeman; sovereign governments may sometimes be penniless, but they are very powerful.
The second threat of the Triple Whammy is also self-inflicted.
The Third Threat
Communications systems compete with GNSS for spectrum: witness the current LightSquared case of a powerful new broadband system. For existing receivers, including those in government systems and aviation, it seems there is no fix for its devastating interference. LightSquared is driven by rich and powerful commercial forces; it could well win this fight.
Communication technologies will continue to press upon the satellite navigation spectrum. LightSquared will likely erode spectrum gaps between communications and navigation services, the so-called guard bands.
Satellite navigation has become highly political. The intense use of GNSS across our economies makes them vulnerable. GNSS is threatened by a Triple Whammy, by jamming, and by spoofing. These increase the risks to our security and our economies, both in probability and impact. The solution of detecting jammers and making ownership illegal will help with local problems in local areas. But the Triple Whammy threats are not local; they are national and international, world-wide.
Today’s spectrum wars affect us all. That the loss of GPS would increase the price of a loaf — the very trigger for the French Revolution — brings this down to earth.
These are not technical issues, they determine the price of our food! They constitute a real and present danger to our societies — down to the mundane yet very real level of our daily bread.
David Last is a past-president of the Royal Institute of Navigation, a consultant and expert witness on radio-navigation and communications systems to companies, governmental and international organizations, and criminal investigators.
Sally Basker, former director of research and radionavigation at the General Lighthouse Authorities of the UK and Ireland, has opened Traxis Ltd: management, business, and technology advice with expertise in navigation service provision. See www.traxis.co.uk.
This article is adapted from a presentation at the European Navigation Conference, London, November 2011. A longer version of the talk appears in the Royal institute of Navigation News.
Nav On Time, a French Company located in Toulouse, has successfully completed a trial campaign of its Mow-By-Sat precision guidance on a commercial lawnmower. In August, the prototype of a GPS-guided robot lawnmower was installed on a golf driving range near Toulouse and tested in real conditions of use, day and night, maintaining a 25,000 square meter lawn since then. In a previous campaign, the mower covered more than 2.2 million yards — equal to1,250 miles or 2,000 kilometers — in 2,100 hours. (See videos of the mower in action at www.youtube.com/DSnavontime.)
With such a success under its belt, Nav On Time is negotiating with different lawnmower manufacturers to bring a product to market. The autonomous lawnmowers already on the market, including machines commercialized by research partner BelRobotics, use underground wired perimeters for delimiting the lawn by an electromagnetic signal, the strength of which is measured by a mower-embedded sensor to determine its distance to the lawn’s limit. But that wire, and its required installation, are technical barriers for a lot of potential customers. Nav On Time is one of the companies developing solutions to get rid of the perimetric wire yet still be able to guide the mower autonomously with accuracy and efficiency.
Between January 2009 and June 2010, Nav On Time coordinated the Mow-by-Sat project, a research and development effort that received funding from the European Union’s Seventh Framework Programme (FP7/2007–2013). Partners included Belrobotics of Belgium, a large lawn-maintenance robot manufacturer, and the University of Catania in Sicily, Italy, through its robotics research department.
The Mow-by-Sat project (www.mow-by-sat.eu) was also undertaken to support development of a GNSS-based navigation and guidance system integrated into an autonomous lawnmower, paving the way for industrialization and commercialization of GNSS applications for a domestic service robot operating outdoors. Beyond this concrete application, the project aimed to increase the adoption of GNSS technologies in robotics applications, studying the benefits of European GNSS (especially EGNOS and Galileo).
Mow-By-Sat uses a virtual fence to replace the wired boundary traditionally used in robot lawnmowers, which provides better flexibility for defining and modifying a mowing area. Mow-By-Sat enhances the machine’s efficiency by a factor of three, as full steering substitutes for the random operation mode, the company said.
Built around a European GNSS L1 automotive receiver, the u-blox T, Mow-By-Sat uses L1 fixed / floating real-time kinematic (RTK) techniques. A tight coupling between the RTK positioning firmware and the guidance application software aids the mower’s precision. Nav On Time compared it to the challenges of aviation, where the required navigation performance depends on the flight phase.
In its patented architecture, the module embedded in the rover is dumb, and the ground-based station acts as a remote control, ensures traffic management between several machines, and serves as a gateway for remote services such as installation, supervision, and surveillance, all accessible from the Internet. Nav On Time developed both the positioning firmware and guidance application software.
According to Nav On Time CEO Michèle Poncelet, Mow-By-Sat offers significant competitive advantages to the machine manufacturer compared to expensive RTK solutions now on the market. She cited:
easy customization because of its open architecture,
an affordable solution for small and inexpensive mobile machines,
a technology enabler for replacing human-controlled and energy-consuming machines with smaller and cheaper machines that have a smaller carbon footprint.
With six Engineers, Nav On Time, founded in 2007, is offering a product line dedicated to precision control solutions for small and inexpensive mobile machines, under a business-to-business model through industrial partnerships. According to Poncelet, its market stretches from human controlled machines (precision agriculture or crane collision avoidance) as driver’s assistance, to unmanned machines (autonomous lawnmowers, other unmanned ground vehicles, intelligent vehicles, and more generally service robots) with full steering.
Other applications envisioned by Nav On Time include a golfball retrieval robot for driving ranges, a beach cleaner robot, and a surveillance robot — any application that requires passing through a pre-determined area in a methodical and systematic way.
Breaking Ground
It would seem mowing lawns isn’t a beloved pastime, as autonomous lawn mowers have been the subject of numerous research projects. For the past eight years, the Institute of Navigation has sponsored a Robotic Lawnmower Competition as a way to encourage college students to develop autonomous steering techniques. During the second ION Autonomous Lawnmower competition, Frank Van Graas, who accompanied the winning Ohio University team, told GPS World, “The centimeter-level positioning accuracy required for lawnmowers in the contest is actually more difficult than automatically landing an airplane.”
One research project, carried out by Navcom Technology in 2005, resulted in an autonomous mower taking on the precise mowing techniques of baseball stadiums, with its checkered patterns. The Navcom project, documented by Michael Zeitzew in his paper “Autonomous Utility Mower,” used a series of beacons to augment GPS. Two off-the-shelf John Deere utility mowers were modified for X-by-wire control, and fixed navigation beacons were mounted around the stadium. Next, the field boundaries were surveyed and input into a map file, used to create the mower’s mission plan.
“The use of GPS requires good sky visibility,” explained Zeitzew. “In this application, due to the stringent navigation accuracy requirements, an RTK-GPS solution is required, which requires the use of a base station. Because many of the baseball stadiums have high walls and other obstructions around the field, RTK-GPS is inadequate, even with augmentation by (affordable) inertial sensors or odometry sensors. This necessitated the use of alternative technology.”
Navcom fielded two mower systems into professional baseball stadiums, one major league and one minor league. Both systems were used over the course of several weeks during the spring 2005 baseball season, and received positive reviews from the professional groundskeepers, who quickly grew comfortable using the machines. The project proved not only that autonomous mowers are possible even for large-scale sites such as a stadium, but that there is indeed a market for them.
Leica Geosystems and TeeJet Technologies have embarked on a partnership in which TeeJet will distribute Leica’s No-Drift mojoRTK auto-steer system under its own label, adding RTK-accuracy guidance to TeeJet’s suite of precision agriculture products.
Under the same agreement Leica will capitalize on TeeJet Technologies’ range of vehicle-specific assisted steering kits to increase the number of tractors the mojoRTK can steer, the companies said. The list of kits offered by TeeJet currently tops more than 50 individual kits, designed to fit approximately 150 individual vehicle models. Initially, Leica will offer TeeJet vehicle kits through its network of resellers, according to the company.
The companies also plan to work together to develop additional products for the agriculture market.
Leica’s Virtual Wrench technology, which provides remote service and support, will also be expanded to support products for both companies, allowing technicians from both companies to provide customers with on-demand service and support, according to the companies.
Most precision agriculture users have settled for 1-meter accuracy using GPS, made possible with the reliable and convenient corrections provided by WAAS (Wide Area Augmentation System).
GPS/GNSS is important to key areas in agriculture, including field mapping, yield mapping, and guidance. Companies such as Hemisphere GPS (formerly CSI Wireless) did very well designing single-frequency GPS receivers for the precision ag market. Hemisphere is also a leading designer of radio beacon (Coast Guard) receivers. Radio beacons, in addition to WAAS, are a free source of corrections for 1-meter accuracy.
Trimble was also an early supplier of precision ag GPS receivers and related equipment, offering single-frequency products such as the AG-132.
While the real-time kinematic (RTK) technique has been around since the early ’90s, it didn’t gain wide acceptance in the precision ag industry. The accuracy was great, down to approximately 2 centimeters at the time, but the equipment was clunky. The user had to set up a reference station near the field he was working on. The communication link was complicated, and some types needed Federal Communications Commission (FCC) licensing. Consequently, there were several potential points of failure. Lastly, the cost for a complete RTK system (base, rover, and radios) was upwards of $50,000. It just wasn’t cost-effective.
The term RTK network is ambiguous because it means different things depending on the industry. Essentially, the hardware setup is the same no matter the industry. An RTK network is a series of dual-frequency reference stations spaced optimally within a region to provide RTK corrections to subscribers in that region. The network subscriber is assigned a primary reference station.
RTK networks for agriculture are single-baseline solutions; the subscriber can only use one reference station at a time. There is no “network solution” or redundancy like there is in RTK networks used in the surveying and construction industries. Therefore, when a single reference station goes down, the subscribers in that area are down also.
Another major difference between RTK networks for agriculture and RTK networks for surveying and construction is the communication method. The latter primarily use data plans on mobile phones to receive corrections. Either the mobile phone is linked via Bluetooth to the receiver or a cellular modem is built inside the receiver.
RTK networks for agriculture, on the other hand, primarily use spread spectrum radios (900 Mhz band) to transmit corrections to the receiver. Spread spectrum radios are free to use and don’t require a license from the FCC to operate. They are limited in their broadcast range, however, typically to two to three miles. To solve this problem, radio repeaters are used to extend the distance.
The Wild, Wild West
Bill Henning, real-time specialist with the National Geodetic Survey (NGS), said it best: the recent explosion of RTK networks is like the wild, wild West. They are proliferating so quickly that it’s hard to keep track of them. One of his tasks is to help develop guidelines for RTK network operators, and I think NGS is making inroads into the survey/construction industry with its initiative. People are looking for guidance with respect to RTK network setup, as well as monitoring for the networks once they become operational.
RTK networks for agriculture seem less structured than in other disciplines, though, and administrators rely more heavily on vendor recommendations. For example, some are based on the ITRF reference frame, while others are based on some version of NAD83. Some networks hire land surveyors to establish their reference station locations, while others do it themselves using NGS’s OPUS program or other methods. Very few, I think, realize the resources available from the NGS, such as the Cooperative CORS program.One would think that ag and survey/construction would consolidate their efforts, since an RTK network can cover the same area for both fields, and the equipment is virtually the same. But a farmer isn’t going to pay the same RTK network subscription rate that a surveyor or construction company will. A farmer is hesitant to pay $4,500 annually when he can select a service such as OmniSTAR and pay $1,500 annually. Some industry folks say that aggressive subscription pricing is the reason RTK networks in the agriculture market have expanded rapidly in the past few years.
The differences between the networks used in agriculture and those in survey/construction are mostly software related. RTK networks for survey/construction offer a true-networked solution, where several reference stations are used to compute a correction, compared to the single-baseline solutions used in ag.
OmniSTAR (HP/XP), John Deere (Starfire), and Novariant (AutoFarm) offer GPS-based solutions for precision ag. They are not pure-play RTK solutions like RTK networks, but they do have RTK capability. True RTK networks are capable of constantly delivering ~2-centimeter accuracy day in and day out. These companies going after the precision ag market offer primarily decimeter-level services (1 decimeter being the equivalent of 10 centimeters), and then RTK solutions when needed.
It will be interesting to see how pure-play RTK players respond as RTK networks for agriculture continue to expand — which they most certainly will.





 RTK networks for agriculture are single-baseline solutions; the subscriber can only use one reference station at a time. There is no “network solution” or redundancy like there is in RTK networks used in the surveying and construction industries. Therefore, when a single reference station goes down, the subscribers in that area are down also.
RTK networks for agriculture are single-baseline solutions; the subscriber can only use one reference station at a time. There is no “network solution” or redundancy like there is in RTK networks used in the surveying and construction industries. Therefore, when a single reference station goes down, the subscribers in that area are down also.