From its very first issues, 31 years ago, this magazine has covered the role of GPS, now GNSS, in guiding ships, trains and automobiles. What were then some of the most aspirational visions of future applications are now routine. For all forms of transportation, navigation is a safety-critical issue. This is particularly true in the case of cars on public roads, which is also where the technical challenges are the greatest. Ships mostly travel in deep waters, far away from other traffic and fixed obstructions, and nearly always enjoy an unobstructed line-of-sight to GNSS satellites. So do trains, which have the additional advantages of being kept, literally, on track and of operating in controlled environments, with hardly any concerns for unexpected intrusions on their path. Cars, trucks, and busses, on the other hand, must contend with many other vehicles, including those with distracted, drowsy, drunk, or drugged drivers, as well as cyclists, pedestrians, accidents, construction and a bedeviling myriad of sudden and often unpredictable circumstances. Additionally, their view of the sky is often limited by overpasses, tunnels and tall buildings, which challenge GNSS-based navigation with signal occultation and multipath, and their view of their surroundings is often blurred by weather conditions.
Currently, prototype autonomous vehicles carry cameras, lidar scanners, radars and ultrasonic sensors to provide positioning relative to mapped features, as well as for collision avoidance. However, some use cases require absolute positioning sensors, consisting of GNSS receivers coupled with inertial sensors. For example, autonomy levels 3 and 4 require dynamic error bounds of no more than a few meters most of the time under challenging highway conditions and levels 4 and 5 will require this level of accuracy even in deep urban canyons.
This month’s cover story highlights progress in several transportation-related GNSS/PNT applications
Autonomous vehicles require lane-level accuracy at all times and in all conditions. However, under many conditions, such as in urban canyons and tunnels, they may lose line-of-sight to enough GNSS satellites to achieve accurate and robust positioning or may have no signal at all. In these situations, they need data from other sensors, including an odometer and an inertial measurement unit (IMU). Creating reliable and safe autonomous navigation requires fusing GNSS and inertial technology in a multi-layered system.
SBG Systems and its partners LeoDrive.ai and Intempora, have been doing this to develop solutions for autonomous vehicles. SBG’s technology enables multi-sensor integration while addressing such autonomous navigation challenges as time synchronization, integrity, precise positioning and high-definition mapping.
“To ensure performance and build trust, we assemble our own IMUs from carefully selected industrial-grade parts, then we calibrate all our products individually,” said Laurent Le Thuant, business manager for SBG, in a recent webinar.
For safe operation, Le Thuant explained, the vehicle’s true positional error (PE) must be smaller than its protection level (PL), which in turn must be smaller than its alert limit (AL): PE < PL < AL. Otherwise, the solution is declared unavailable or reports misleading information.
In automotive tests conducted in a business district near Paris, an SBG vehicle was equipped with both a GNSS-only, automotive-grade multiband RTK receiver equipped with a PL determination algorithm and an RTK GNSS receiver tightly-coupled with an IMU and an odometry input. A comparison showed that the former was not suited for self-driving, while the latter significantly improved the solution availability, accuracy and protection levels.
For self-driving in the most severe conditions, even this solution requires integration of supplementary sensors, such as cameras, lidars and radars for precise localization.
SBG Systems has released a major firmware update for all its high-performance inertial navigation systems (INS), including its Ekinox, Apogee, Navsight and Quanta brand sensors.
Developed in collaboration with customers, firmware 4.0 provides new features and is designed to make integration easier for system designers. It aims to provide improvements in these areas:
System accuracy and robustness
Enhanced heading in a single antenna allows for easier UAV survey operations.
Improved GNSS antenna auto lever arm calibration provides a faster and easier system setup.
Easier system integration
New PTP and NTP features for time synchronization eliminate the need and cost of an external timing module.
An integrated NTRIP client eases access to NRTK/VRS correction services.
A logged RTCM raw stream eases post-processing in SBG Systems’ post-processing software Qinertia using the user’s NRTK/VRS data.
A new Access Rights Management System sets up specific user roles.
Two serial outputs have been added on Navsight and Quanta for advanced survey setups.
REST API has been introduced for power users and integrators.
Septentrio now offers Qinertia post-processing software from SBG Systems on AsteRx-i3 D Pro+, AsteRx-i3 S Pro+ and AsteRx SBi3 Pro+ receivers
Septentrio will now offer post-processing solutions for its GNSS/INS (inertial navigation system) receivers, using SBG Systems’ Qinertia software.
The AsteRx-i3 Pro+ receivers are fully compatible with Qinertia post-processing software, so no data manipulation is required before the post-processing step.
Land or aerial mapping applications, which do not have access to real-time GNSS corrections, benefit from post-processing software for higher positioning and orientation (heading, pitch and roll) accuracy. With the addition of post-processing, Septentrio GNSS/INS products cover the full mapping workflow.
“As a result of our cooperation with SBG Systems, Septentrio’s mapping customers who use GNSS/INS are benefiting from a quicker and more reliable workflow,” said Danilo Sabbatini, product manager at Septentrio. “The intuitive user interface of Qinertia software makes it easy for users to further improve their positioning and orientation accuracy in the post-processing step.”
In case of GNSS outage or correction link failure, post-processing recovers accuracy for recorded positioning and inertial data.
After the mission, Qinertia gives access to real-time kinematic (RTK) corrections from more than 8,000 base stations to deliver centimeter level accuracy. Trajectory and orientation are greatly improved by post processing GNSS and IMU data forward and backward. The Qinertia GNSS/INS post-processed kinematic (PPK) solution provides accuracy, reliability, advanced quality-control indicators, and a modern application programming interface (API).
Qinertia recently added an image geotagging feature, and specific outputs dedicated to photogrammetry.
Qinertia post-processing software will be used on Septentrio receivers. (Photo: SBG Systems)
UNMANNED SOLUTION, a South-Korean company based in Seoul, develops autonomous vehicles, including driverless shuttles, autonomous agricultural equipment, robots, and educational platforms. (Image: SBG Systems)
What is complementary / alternative positioning, navigation, and timing (PNT)? In this month’s cover story, five of our marketing partners share their perspective on this question and explain how their products address it.
The four global navigation satellite systems (GNSS), two regional navigation satellite systems and public and private augmentation services continue to provide exceptional levels of accuracy and reliability for positioning, navigation and timing (PNT). Yet their well-known vulnerabilities also continue to fuel the need for alternative/complementary sources of PNT data, especially for new and rapidly expanding user segments such as autonomous vehicles.
What constitutes a complementary service to GNSS for PNT and what constitutes a true alternative is partly a matter of definition and opinion. In a January report, the U.S. Department of Transportation stated
…suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS. To achieve the parallel objective of resilience, as described in Executive Order (EO) 13905, that path should involve a plurality of diverse PNT technologies. Promoting critical infrastructure owner/operator use of those technologies that show strong performance, operational diversity, operational readiness, and cost-effectiveness is worthwhile. Based on this demonstration, those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber optic time services to transmitters/control segments. (Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.)
A portion of the former USCG Loran Support Unit in Wildwood, New Jersey, with its iconic Loran antenna. (Image: UrsaNav, Inc)
For this year’s Q&A on complementary / alternative PNT, I asked five companies in the GNSS/PNT space to tell us how they define the issue, what solutions they prioritize, what markets they target, and which of their products specifically address the need to make PNT more resilient.
Roger Hart: The deep adoption of the state-sponsored, space-based global navigation satellite systems (GNSS) defines them as the primary PNT source at this time. Inertial navigation, long predating GNSS, does provide an independent navigation solution but does not provide time. In today’s conversation, alternative PNT generally refers to deriving position and timing from existing signals not purposed for navigation, to ground-based location systems, and also to emerging satellite systems that operate at higher power — or out of the GNSS band — to provide a diversity of PNT sources.
David Sohn: Simply put, alternative PNT is usually anything that is not GNSS. So, this includes PNT derived from low Earth orbit (LEO) satellites; vision, radar, lidar combined with inertial measurement units (IMUs) and map matching; positioning off cellular WiFi, digital TV signals and other signals of opportunity; legacy nav aids like VORTAC, ILS, DME and eLoran; and new dedicated infrastructure positioning systems like Locata, NextNav or RFID.
Matthieu Noko: Here at SBG Systems, for 15 years we have been developing navigation systems based on smart coupling of GNSS technology and inertial sensors. From our perspective, inertial sensors as well as sensors such as odometers or DVL, combined with high-end algorithms and RAIM, build consistent alternatives to GNSS-only systems in the vast majority of outdoor applications. Inertial sensors dramatically enhance GNSS-only navigation systems, making it possible to provide navigational data during GNSS outages in urban environments or to reject false GNSS measurements due to multipath effects.
As its entry into the driverless category of the Formula Student Germany car race, AMZ modified the car it has used in competition since 2015 to be driverless. (Image: SBG Systems)
The hybridization of several technologies makes it possible to reach a sufficient reliability level for the majority of commercial applications. However, in some indoor applications or in case of intentional jamming or spoofing, a higher resiliency is required. Using visual odometry can then complement quite effectively the navigation system, although this technology is still at a research level. Compared to infrastructure-based alternative PNTs — such as WiFi, Bluetooth or ultra wideband (UWB) ranging — visual odometry has the great advantage of not requiring any infrastructure.
Jacob Amacker: GNSS remains the dominant method of PNT in terms of market applicability and performance, but there are many rival technologies that have great potential and will compete with GNSS going into the future. The most important changes in PNT will be methods of position localization that are able to replace GNSS, and we will likely see these technologies integrated into huge systems, making use of ubiquitous technologies such as lidar. Whereas GNSS still provides the most accurate timing, as systems get more complex, time synchronization becomes a bigger issue, so different methods of this need to be explored.
There are many ways of improving the navigation data overall. Most commonly an IMU and a Kalman filter will be employed to stabilize any errors in the position localization method. A Kalman filter is a method of processing data from a range of sources—say, GNSS, an IMU, and a wheel speed sensor—and using them in such a way as to arrive at the position with a greater accuracy and precision than either source alone would be able to achieve. This process, however, requires precise timing for each data stream. Therefore, one area in which alternative PNT has to compete with GNSS is timing precision. GNSS makes use of atomic clocks used on satellites that are as accurate as you will get. There are also several ways of synchronizing time. A timing system can only be as precise as the most precise clock on the network, but there have been developments, such as Precision Time Protocol (PTP) that can synchronize timings across a network of clocks over Ethernet connections. Traditionally, PPS has been used and whereas this is still very precise it is not able to compete with PTP on convenience or sophistication.
Charles Schue: The common definition these days for “alternative PNT” seems to be with respect to, or as compared to, GPS or GNSS. Even the U.S. DOT’s website speaks to PNT as related to GPS.
I used alternative, complementary and backup somewhat interchangeably during my entire career with the U.S. Coast Guard. In recent years, I injected “co-primary” into the conversation as well. Prior to GNSS becoming ubiquitous, alternative, complementary and backup were not technology-based terms, but were instead operationally based. For example, “the prudent mariner” or “the prudent aviator” should use all means at their disposal to safely navigate their platform. For the navigator, this would include visual, audible and electronic signals or aids. The solution of choice obviously was the one that provided the highest accuracy, availability, integrity and continuity. However, prudence required always checking the solution of choice against other readily available alternatives, preferably that complemented each other, to ensure safety and continuity of operations. At one time, shipboard navigators might have at their disposal Loran-C, OMEGA, GPS, INS, radar, sextant, visual bearings (such as lights and landmarks), beacons, and soundings. Similar alternatives were available on aircraft.
Although always in the mix, timing was often in the background until around 2000. Then it started to become as important as positioning and, in many areas, even more important than positioning. Today’s incredible dependence on technology, and interdependence between technologies, means that knowing your “when” has become as important as knowing your “where”.
Whatever the terminology, the definition of alternative PNT should include some key features. Firstly, we should accept that the solution of choice today is GNSS, and we should define it as primary or co-primary. Next, we should acknowledge that when the primary solution is available and trustworthy, it should always be used, or at least considered. Finally, the primary solution should continually be compared with alternatives to ensure safe and secure provision of PNT to the user. Thus, an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from alternatives to withstand the effects that might be affecting the primary solution.
Do you agree with the U.S. DOT’s assessment, cited above, of what it will take to make the national PNT much more resilient and reliable? If you do, how do your offerings fit into that framework?
RH: While there are intricate differences in the signals generated by the primary PNT systems, they are all quite similar in terms of frequency and power and are all vulnerable to the same types of interference. Achieving the most resilient solutions will require the use of alternative RF bands and non-RF sources. Having a variety of alternative PNT sources will allow users to integrate the method most applicable to their platform constraints. Integration across the various PNT sources will need time synchronization to take full advantage of the alternate PNT systems. Our offerings work concurrently with GNSS, providing simulation and testing of GNSS and alternative PNT as true complements, while also offering the ability to measure timing accuracy in real time.
DS: Yes, we agree with the DOT’s assessment. However, to be clear, the DOT does not require “LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber-optic time services to transmitters/control segments.” It stated that to achieve resilience, systems “…should involve a plurality of diverse PNT technologies…that show strong performance, operational diversity, operational readiness and cost-effectiveness.” Their demonstrations showed that those technologies they called out meet these criteria. Our solutions have been leading this resilient approach by offering several diverse, alternative PNT references.
We have fielded time-server equipment that operates from both GNSS and eLoran. Our standard offering time servers are equipped with multiple references from GNSS, network-based time services from NTP, PTP and PTP WR; internal references from disciplined atomic clocks; wireline references from IRIG, 1PPS or ASCII time code; and LEO PNT reference from the STL signal.
(Image: SimonSkafar_E+_Getty Images)
L-band or more generally the use of geostationary satellites was until very recently the only communication link for PNT augmentation services, although these signals are weak and easily disturbed or masked, especially at high latitudes. Resilient navigation will clearly need to allow multiple downlinks for corrections such as terrestrial networks (4G/5G) or satellite-based internet. In the mid-term, we expect the correction delivery over IP to become the standard, and L-band corrections to be used as a backup only. All our high-performance products already include an NTRIP client able to handle the IP corrections very easily.
JA: This is certainly one option. Largely, it is borne out of a need to compensate for the disadvantages of GNSS. This larger range of frequencies would provide a range of satellite-borne signals that have different penetration characteristics and information carrying properties but the same core purpose. Therefore, somebody making use of such a system will be better able to receive these signals even when under obstructions. Of course, some obstructions will still be impenetrable to GNSS signals and there is a long way to go to developing a comprehensive solution that can deal with timing differences when the signals travel through objects. It is likely that some other source of timing information, for example through the proposed fiber-optic services, will be necessary to smooth out these issues. Although we will see this much-needed upgrade to cover the shortfalls of GNSS employed, many other alternatives will start to take prominence. It is difficult to say which solution will win out, and it is likely that an upgraded GNSS will continue to dominate for the next decade or two at least. In terms of our offerings, we are exploring all possibilities and keep our core technology open to any position localization method. Of course, we will welcome any new technology that is a viable and improved method of PNT.
CS: I have long been an advocate of a system-of-systems approach simply because there is no PNT solution available yet that works everywhere, under all conditions, for all users, all the time. Many solutions provide only a component of PNT: an INS provides position (the “PN”), and an atomic clock provides time (the “T”). However, an INS does not know “where” it is without initialization and updates, and an atomic clock does not know “when” it is without initialization and updates. Fiber is awesome but is not wireless. Many alternatives depend upon GPS/GNSS as a necessary input. Others are augmentations that depend upon GPS/GNSS as inputs and not direct alternatives, such as space-based or land-based augmentation systems. Some are mode-dependent — such as VOR, DME, ILS, and TACAN for aviators — and thus not useful to other modes: time/frequency, maritime, land-mobile or handheld.
So, yes, we agree with the government’s assessment that low-frequency (LF), generally referring to eLoran in the United States, is the best, very wide area, terrestrial, wireless alternative, and is an essential component of any resilient PNT framework. Irrespective of whether the implementation is Loran-C, eLoran or LFPhoenix, LF is the lowest cost terrestrial PNT solution per million square miles of coverage. All our offerings are focused on the LF portion of the resilience framework. Our offerings easily integrate with any existing PNT technology and have proven in real-world government testing their ability to survive heavy jamming and spoofing environments.
What markets and applications do you target?
RH: Spirent Federal provides simulation test solutions to U.S. government and affiliated organizations. Applications range from core GNSS receiver development to real-time, hardware-in-the-loop system integrations. We have a long history of supplying the U.S. government and contractors with first-to-market products, from Y-code, SAASM, inertial and M-code, to sensor fusion of the latest alternative signals and sensors. We provide test solutions to safety-critical applications that are expected to have the same level of operational performance both in GNSS-available and GNSS-denied environments. Providing a single test platform that can help validate performance in both environments has received positive responses from users in the autonomous vehicle industry.
DS: Aerospace and defense, data-center and communication networks, public safety, industrial control, search and rescue, and space.
Autonomous self-driving mobility solutions move people and goods at appropriate speeds in urban and campus environments. (Image: SBG Systems)
MN: SBG targets a large range of applications including from a relatively small BVLOS drone for remote operation to large hydrographic vessels or airborne survey. We divide the applications into two main categories:
Surveying and mapping, where the inertial navigation system is used to stabilize the measurements from a lidar, sonar or camera to generate high-precision maps.
Control applications, where the PNT and orientation solution is used in real time to feed autopilot or to stabilize a camera. These applications include unmanned vehicles, machine control, camera pointing and more. High resilience is then critical to ensure safe navigation.
JA: Two main applications we are targeting with alternative PNT are surveying and ADAS systems. Both of these applications often make extensive use of lidar systems. We are therefore looking at lidar-based simultaneous localization and mapping (SLAM) algorithms to aid PNT or to provide relative position localization without GNSS. In cases when GNSS is totally unavailable, it is usually possible to set up ground control points. Although these cases are limited, they give much more flexibility in options. Anticipating a future where autonomous driving is the norm and not the exception, new building projects will need to be planned with the adequate systems in place to allow for them, and this will include a system such as UWB.
CS: Our employees have been involved in the design, development, deployment or sustainment of every Loran-C and eLoran system site in the world (transmission, control or monitor) since the mid-1970s, including components of the Russian Chayka system. Our service provider and end-user technologies are operationally proven in commercial and military environments. We specifically target the maintenance and upgrade of existing systems, as well as the implementation of new systems, globally.
Which of your products directly address the need for alternative PNT?
RH: In a broad sense, Spirent offers a market-proven and innovation-driven solution portfolio for the simulation of inertial sensors through the SimINERTIAL and SimSENSOR product lines, seamlessly integrated with our GNSS simulation. Spirent is actively engaged with several alternative RF vendors to incorporate signal simulation capability and will offer an alternative RF navigation product in 2021 called SimAltNav Replay. This product will allow for concurrent GNSS and alternative RF signal simulation. Additionally, Spirent offers many other alternative PNT solutions for testing resilient systems for connected vehicles and sensor-fusion algorithms for tactical and military-grade systems. We are developing new products to incorporate an open Ethernet interface allowing for open-source Ethernet-based sensor simulation.
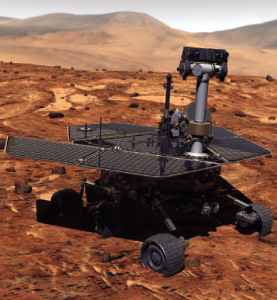
Remotely controlled rovers are used to test and practice complex tasks in Mars-like desert environments. (Artist’s Rendering: Stocktrek Images_Stocktrek Images_Getty Images)
DS: Our time servers are equipped with high-quality precise internal time references such as OCXOs or atomic clocks and then disciplined by external references such as GNSS. They are resilient because they can operate precisely for long periods in GNSS-denied situations as standalone devices in holdover mode or from multiple alternative references, such as:
network-based NTP, PTP and PTP WR time services
wireline references from IRIG, 1PPS or ASCII time code
LEO PNT reference from the STL signal
eLoran when available
They are also resilient because they detect and mitigate interference from the GNSS signal before it can corrupt the PNT solution.
Our GNSS simulators are adding alternative PNT features to provide a complete test and evaluation solution for resilient PNT systems. We have recently added INS/IMU test features and have integrated with Anritsu’s cellular test stations to evaluate and qualify combined GNSS/cellular location functions. Orolia GNSS simulators support generation of custom GNSS signals and playback of IQ waveforms, and provide complete toolsets for GNSS jamming and spoofing testing. This allows creation of the threat environment to allow evaluation of alternate PNT signals as backup or alternative to GNSS. Orolia offers an open-source framework allowing any end user to develop their own sensor plug-in leveraging the Skydel simulation engine.
Our Resilient PNT for Defense product line includes the VersaPNT, which uses alternate non-GNSS PNT sensors such as IMUs, barometers, wheel ticks, INS and non-GPS-based LEO satellites. Alternate RF navigation or non-GNSS sources of radio frequency (RF) are of interest in highly degraded or contested signal environments. Interest is focused on low-Earth-orbit (LEO) constellations. These systems offer high receiver signal power (relative to GNSS) and a secure and resilient link to augment GNSS.
MN: All our products are designed to answer to challenging GNSS conditions, starting with our Ellipse series, which includes an industrial-grade IMU capable of coping with short-term GNSS outages. Its miniature size allows integration in robotics and also makes it suitable for cost-sensitive applications. Our Apogee and Horizon series, with their navigation-grade IMUs, are the most resilient systems in the event of GNSS outages. These products reach very high-end performance in real time, but become exceptional when used with our post-processing software Qinertia. Tightly coupled algorithms make the solution capable of coping with long-term GNSS outages.
JA: We have previously created solutions using retroreflective strips for path following with driving robots. and we are also compatible with Locata’s system, a large infrastructure solution popular for automation in shipping ports. More recently, we have released an offering for UWB in an integration with Pozyx. This is perfect for GNSS-denied environments as a direct replacement for what GNSS can provide in terms of position information. We are also exploring alternative ways to synchronize clocks and get timing information. This year we have developed PTP functionality on all of our devices. Alternative PNT is going to be vital as we look to the future of navigation and thinking about how we can navigate flawlessly anywhere and address more complex environments, particularly urban areas.
CS: We are focused on the provision of terrestrial low-frequency equipment and systems for primary, co-primary, alternative, complementary and backup PNT. We provide all the products and services required to design, develop, install, certify, operate and maintain Loran-C, eLoran and LFPhoenix equipment and systems. We provide the technology to perform coverage diagrams and site surveys; all the equipment required at a transmission site; all the equipment required at a differential reference station or quality-of-service site; all the equipment required for a monitor and control site; ASF measurement and analysis equipment; and various models of end-user equipment (including receivers and antennas) for the timing/frequency, maritime, aviation, land-mobile and handheld markets.
As the skipper of Galileo 4, a 50-foot sailboat on the Columbia River, I instruct my crew to alert me if the water under the keel drops below 10 feet and take immediate action if it drops below 5 feet, because I cannot constantly monitor my chart to avoid running aground. Yet, the huge cargo ships that navigate the river for 100 miles from its mouth at Astoria to the Port of Portland sometimes have as little as two feet of vertical clearance.
This feat of navigation is made possible by the knowledge, experience and electronic equipment used by the river pilots who steer the ships, the hydrographers who survey the river, and the dredge operators who perform the Sisyphean task of maintaining the required depth of the navigation channel. Each additional inch of draft they enable allows a ship to carry additional cargo worth up to several million dollars.
In similar ways, marine professionals around the world cooperate to chart ocean bottoms and to keep ports, harbors and navigable waterways safe for the more than 90% of trade that is carried by ships. Additionally, off-shore installations—such as fiber optic cables, pipelines, drilling platforms and wind turbines—all require accurate surveys of the ocean floor. Finally, population growth in coastal areas and sea level rise due to climate change are driving the need for bathymetric data for planning and emergency management.
Bathymetry
For centuries, mariners recorded water depth using nothing more than a lead line, a compass, a sextant and a rudimentary nautical chart. This was such a time-consuming process, however, that they could only perform it for a tiny percentage of the world’s oceans and coastlines. Today’s technology makes the process not only more accurate, but also vastly more efficient.
In deep waters, depth data is collected using huge multi-beam echo sounders (MBES) that operate at very low frequencies. As the depth decreases, smaller devices are used that operate at higher frequencies and, therefore, have higher resolution. However, close to shore, the efficiency of these devices drops dramatically, as the cone of their sound signal is cut off by the slope of the shelf. This is where airborne lidar sensors become a much more efficient means of collecting depth data.
In addition to data from the sounders, bathymetry requires data about the vessel’s location and attitude. The former, an obvious requirement for any kind of mapping, are collected by differential GNSS receivers. The latter, collected by an inertial measurement unit (IMU), are used to compensate for variations in the depth measurement depending on the vessel’s rotational movements (roll, pitch and yaw) and translational movements (heave, surge and sway). This is the same reason that aerial photogrammetrists use IMUs on aircraft.
Challenges
Traditionally, MBES systems have been large, complex and expensive. However, they are rapidly becoming smaller, cheaper, quicker to deploy, and easier to use thanks in part to the introduction of inertial systems that use microelectromechanical systems (MEMS), said Ludovic Bazin, technical support manager for SBG Systems, which specializes in MEMS technology. “You can see that the new systems are being increasingly deployed in smaller autonomous vehicles, on smaller autonomous surface vessels (ASV), and even smaller vessels. So, people can go quickly in operation,” he said. An additional advantage, he pointed out, is that they do not require an export license.
A key to accurate bathymetric surveys is reducing the error budget aboard the vessel, where the survey positions are tied back to a GNSS antenna. “You have errors all the way through the system,” said Richard Turner, vice president of global marine sales for Hexagon’s Autonomy & Positioning division, which caters mostly to the market for survey related to oil and gas. He attributes the largest improvements in recent years to the increase in accuracy using precise point positioning (PPP). “If you are out of range of real-time kinematic (RTK) and any other near-shore positioning, the accuracy of PPP is constantly improving,” he said. “It is getting down into the five-centimeter range horizontal or better than that.”
Turner also pointed to the tight integration of inertial navigation system (INS) technology with other systems. “Every time you improve the accuracy of your system the specs go up,” he said. Therefore, the challenge is to ensure that the equipment is installed properly, which requires very accurate offset measurements. “It is no good having two centimeters position accuracy if your heading or your offsets are wrong.” Generally, he points out, boats are not designed for this type of installation, due to such things as long cable runs.
Hexagon will send surveyors out with equipment from Leica, one of its divisions, to do the dimensional control and to calibrate the gyroscopes, which are another source of error. In 2014, Hexagon acquired Veripos. “Many of the people in the Veripos organization come from the offshore survey world or the dredging world, so it is very marine focused,” said Turner. “No other providers have the marine experience that we do.”
For bathymetric software companies, the main current challenge is “keeping up with all the modern and cheaper hardware,” including RTK receivers, echo sounders, and side scan sonars, said Leon Steijger, owner and programmer at Eye4Software B.V., which makes the Hydromagic software.
Requirements and capabilities
To get accurate data, all position and depth records must be timestamped with high precision so that the location of the echo sounder pings can be calculated during post-processing, Steijger noted. “The software needs to be able to generate elevation maps, depth contours, and 3D terrain views and must support volume calculations to calculate how much water there is in a basin, or to determine how much material has been removed during dredging operations.”
Hydromagic uses “plugins,” which are pieces of software that are loaded optionally to interface sensors with the software. “For some hardware we also offer a plugin containing a user interface that can be used to, for instance, upload a planned route to an automatic pilot or to control the signal processing parameters of an echo sounder.” Operators only need to specify the dimensions of their vessel and correct for the sound velocity and the static draft (the distance between the water surface and transducer). They see the vessel’s track in real time, but the rest of the data are post-processed.
Hexagon controls its own correction services and the network that delivers them. “We obviously build our own GPS receivers, so we can tightly integrate inertial systems,” said Turner. “We use third-party inertial systems. However, because we have access to the tracking loops on the GNSS boards, we can tightly integrate that inertial system so it gives a level of coupling that’s difficult unless you are actually building those boards yourself.” While near-shore operations can use RTK or post-processing, he pointed out, “the offshore guys often use real-time positioning to collect data for oil and gas. And that is really where we come to the party, because we have all those services too.”
SBG Systems designs, manufactures, and calibrates its own IMUs, then integrates them with GNSS boards, creating OEM products. “We also design and produce our own firmware algorithms to merge all those datasets,” said Bazin. “From the selection of the MEMS sensor to the final product, SBG will design, manufacture, develop, and produce the entire systems. We also provide tools for people to integrate our systems to develop their own libraries or to integrate our libraries into their systems and work with some integrators for APIs so they can control our systems from their own application.” The company’s post-processing system, Qinertia, integrates GNSS corrections with raw IMU data. “So, when we do post-processing, we reprocess an entire solution at the end for position, but also for stabilization for pitch, roll and heading,” Bazin explained. One of the benefits is the ability to remove many multipath effects.
For bathymetric surveys using an unmanned aerial vehicle (UAV), the control software must keep the platform at a constant altitude and speed over the surface of the water, because the echo sounder is dragged through the water at the end of a cable, explained Alexey Dobrovolsky, CTO of SPH Engineering, based in Riga, Latvia, which delivers UAV-related software. Therefore, he said, “missions should be executed in a fully automated mode.” His company’s software only requires the UAV’s operator to define the survey area, set the direction of the survey lines, and specify the distance between them. The software will handle everything else. “We automatically recalculate the depth measured from the echo sounder to the real depth in our data files using data from a radar altimeter,” he said. “Our software contains a high-end model of the echo sounder, which has a tilt sensor and a pitch sensor.”
Of course, dragging an echo sounder from a UAV only works for small areas, such as in open pit mines where the liquid can be very contaminated. “The flight time with an echo sounder of the most popular UAV will be around 20 minutes,” said Dobrovolsky. “That determines the maximum length of the survey lines that can be covered by a single flight.”
A couple of years ago, SPH began to provide some UAV-based bathymetry solutions that use low frequency ground-penetrating radar (GPR). There are two scenarios when GPR can be useful for bathymetry, Dobrovolsky explained. The first one is to do bathymetry through ice on the surface of lakes or rivers, which would require drilling holes to use an echo sounder. “With GPR, you can do bathymetry through the ice layer,” he said. The second scenario is mountain rivers with extremely strong currents, when it is not possible to use a standard manned or unmanned boat, because GPR works without contact with the water.
Bathymetric systems are now also deployed on autonomous underwater vehicles (AUVs) that are only one to three feet long. “MEMS INS are compact and can be integrated directly with MBES systems, which provide an all-in-one compact system that can be easily deployed and operated because they are lightweight and their mechanical alignments are known and fixed,” said Bazin. “Some of these systems can go 2,000 meters below the surface of the water.” In post-processing, he pointed out, some MEMS INS can have an angular accuracy as low as 0.07 degrees for the vessel’s pitch and roll and a heading accuracy of as little as 0.01 degrees.
Outputs
To integrate diverse sensors with a UAV, SPH developed an onboard computer, called UgCS SkyHub, that logs data from the sensors. In the case of the echo sounder, it can be an NMEA stream or just a stream of current depth measurements, said Dobrovolsky. The device is also connected to the UAV’s autopilot, so it logs the platform’s position and speed, and with the altimeter. UgCS SkyHub can record three types of data files: a CSV file containing the coordinates, depths, and a few additional parameters; a file in NMEA 0183 format, which is also standard for bathymetry; and a SEG-Y file containing the full echo sounder data, including, for example, sediments and objects in the water.
SBG Systems’ software has two kinds of outputs, Bazin explained. First, a proprietary binary format, as well as NMEA and ASCII formats, that are used to provide stabilization and navigation for the platform in real-time. Second, a standard as-built survey format for post-processing. “Then, we have very powerful tools to output ASCII files that are completely configurable from header to footer,” he added.
Eye4Software’s main outputs are volume reports or plot sheets for end customers containing a map with depth colors and depth contours, as well as cross section views or XYZ export files for further processing in, for instance, AutoDesk Civil 3D and AutoCAD.
Feature image: A UAV from SPH Engineering tows a bathymetric sonar just under the surface of a river. (Photo: SPH Engineering)
U.K.-based Unmanned Survey Solutions (USS) has created a unique unmanned surface vessel called the Accession Class USV. It’s modular design offers three variable boat lengths depending on the desired application. The base boat length of 3.5 m can be extended to 4.25 m or 5 m by adding additional hull sections.
The standard USV configuration includes sensors for meeting International Hydrographic Organization (IHO) special-order surveys. The sensors consist of an R2Sonic SONIC 2024 multibeam sonar; an SBG Apogee Navsight Inertial + GNSS solution, and a Valeport MiniSVS and Swift SVP for measuring sound velocity.
Image: Unmanned Survey Solutions
The data is acquired in either Hypack or QINSy hydrographic software and used for mission planning, data acquisition, post processing and final products. Designed for operations in both nearshore and offshore environments, the autonomous platform is safer and more cost-effective than comparative manned vessels, USS said.
Image: Unmanned Survey Solutions
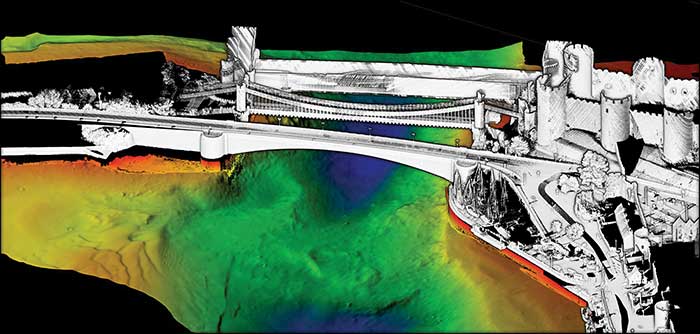
Although the Accession USV is payload agnostic and fully customer configurable, the standard configuration can also be interfaced with a mobile lidar such as the Carlson Merlin laser scanner for mapping terrestrial structures to create a full 3D point cloud above and below the water. This is achievable because of the embedded SBG inertial navigation system (INS), which is extremely versatile for both shallow or deeper water regions as well as challenging GNSS environments such as under bridges. In such situations, the centimeter-level RTK position accuracy is greatly improved using the SBG’s Qinertia post-processing software. This PPP- and PPK-capable software offers single or virtual base-station modes and can even incorporate users’ own base-station RINEX data.
“Not only did we want to create an autonomous vessel specifically for surveyors, but we also wanted to incorporate the latest advanced sensor technologies,” said James Williams, USS director. “It was also extremely important that the final combined solution had a low CO2 footprint and was more cost effective than similar manned vessels.”
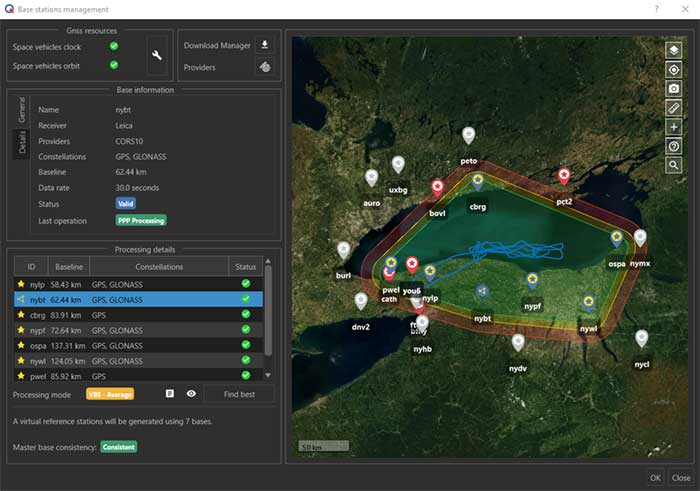
The virtual base station feature in SBG’s Qinertia computes a virtual network around a project in which position accuracy is maximized, homogeneous and robust, the company said. (Photo: SBG Systems)
SBG Systems has released a virtual base station (VBS) feature in Qinertia, its in-house GNSS and inertial navigation system (INS) post-processing software. According to the company, trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions.
The VBS computes a virtual network around a project in which position accuracy is maximized, homogeneous and robust like a PPK short baseline, SBG said. Once surveyors collect data, Qinertia chooses the most relevant reference stations, builds a virtual network and brings the project to the centimetric accuracy with no jump on accuracy nor convergence effects, even in urban areas.
According to SBG, it has worked to offer a VBS which takes the most out of any GNSS receivers from different brands and models — with different configurations or constellations — and even with different coordinate systems. Qinertia automatically adjusts the VBS network to compensate for any base station position inaccuracy and provides full quality control indicators to assess the expected accuracy and reliability, the company added. Qinertia VBS technology can mix users base stations with permanent network base stations to improve accuracy in remote locations.
Finally, Qinertia automatically selects the best positioning technology that applies to a user’s project, whether it is a single base station mode, the virtual base stations mode or a precise point positioning computation. Despite this, users can still take control and make adjustments — like — while Qinertia automatically re-checks and re-computes all parameters simultaneously to validate the accuracy and consistency.
SBG Systems has built a program designed to sponsor student teams participating in competitions, as well as offer discounts for universities and research centers on inertial sensors and post-processing software.
Through the program, the company sponsors students participating in competitions in various fields, such as robotics, autonomous vehicles, UAV, rockets, unmanned and solar boats and more. This includes support during the competition, as well as during the installation of SBG’s latest inertial navigation systems in the teams’ vehicle prototype, the company said.
SBG’s Ellipse series is also eligible through its education program. The series is composed of SBG’s miniature inertial measurement units, attitude and heading reference systems and inertial navigation systems. In addition, the entire product line has been renewed. The new Ellipse INS/GNSS embeds a quad constellation, dual frequency, and dual Antenna RTK GNSS receiver to bring centimetric position and higher accuracy orientation in the smallest package, SBG added.
In addition to being compatible with CAN and ROS, the Ellipse Series’ sensors are compatible with SBG’s Qinertia Post-Processing Software, the SBG Systems’ in-house INS/GNSS post-processing software. Qinertia allows users to replay, analyze, improve their trajectories and access RTK corrections worldwide to bring their project to the centimetric accuracy.
SBG Systems designs and manufactures MEMS-based inertial motion sensing solutions. According to SBG, its products are ideal solutions for industrial and research projects such as unmanned vehicle control, antenna tracking, camera stabilization and surveying applications.
A roundup of recent products in the GNSS and inertial positioning industry from the September 2020 issue of GPS World magazine.
OEM
Inertial sensors
Includes four models
Photo: SGB Systems
The third-generation Ellipse series has a 64-bit architecture, allowing high-precision signal processing. All of the INS/GNSS devices now embed a dual-frequency, quad-constellation GNSS receiver for centimetric position and higher orientation accuracy. The Ellipse-A is a motion sensor; Ellipse-E provides navigation with an external GNSS receiver; Ellipse-N is a single-antenna RTK GNSS/INS; and Ellipse-D is a dual-antenna RTK GNSS/INS. With its new 64-bit architecture, the third-generation Ellipse series enables the use of high-precision algorithms and technology used in high-end inertial systems such as rejection filters and FIR filtering.
The PNT-6220 Assured Reference combines low-Earth-orbit (LEO) signals, GNSS, terrestrial, wireline and atomic clock services in one small solution for critical infrastructure applications. The PNT-6220 seamlessly combines concurrent L1, L2, L3 and L5 GNSS reception with a LEO-based Satellite Time and Location (STL) timing receiver. It also includes terrestrial receivers and PTP/IEEE-1588 edge grandmaster and PTP/IEEE-1588-slave capability. It provides assured PNT for critical infrastructure applications such as those described in the directives of Presidential Executive Order 13905. It can serve as a timing reference for 5G equipment, an ePRTC-capable reference, or a high-performance disciplined reference that supports PTP/IEEE-1588, STL, RF distribution and multi-frequency GNSS capability. The PNT-6220 can automatically select the most optimal UTC reference input and switch over among its numerous reference inputs if one or more are jammed or spoofed, as well as average several references for additional stability and accuracy.
Jackson Labs Technologies, jackson-labs.com
GNSS Receiver
Integrates correction service
Photo: Septentrio
The AsteRx-m2 Sx OEM board provides a GPS/GNSS receiver with always-on sub-decimeter accuracy without the need for additional correction service subscriptions. GNSS corrections are automatically streamed to the receiver. The integration enables plug-and-play positioning with high accuracy available out of the box. The AsteRx-m2 Sx is an efficient positioning solution for small robots, aerial drones and automation applications. Advanced anti-jamming technology AIM+ ensures robust and reliable operation in challenging environments, even in the presence of RF interference.
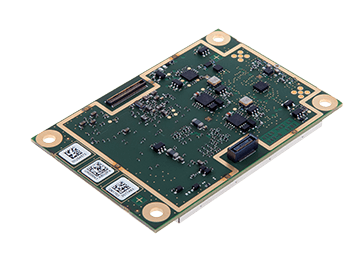
The xOEM v3 inertial navigation system includes the architecture from the company’s IP65-encased xNAV v3 as well as a full range of software interfaces, providing integrators maximum configuration flexibility, real-time monitoring, post-processing and analysis. Software interfaces can be customized using the OxTS NAVsuite. Plugins can be created using the company’s NAVsdk, allowing the xOEM v3’s software to be easily packaged and included as part of a product.The high-grade MEMS inertial sensors and real-time kinematic (RTK)-capable GNSS receiver within the xOEM v3 board set deliver high performance capabilities. The board set provides 0.1° heading accuracy, 0.05° pitch/roll accuracy and 2 cm global position accuracy. The board set is compact at 150 grams, which enables manufacturers to seamlessly integrate and build a high-performance INS into their products, such as commercial mapping applications on land and in the air. Its light weight means more payload capacity for other critical components. An add-on lidar georeferencing software package is also available with a sophisticated boresight calibration tool.
The M300 Plus GNSS receiver is designed to supplement the company’s M300 Pro, which is aimed at clients who need a more economical version for their CORS networks. The M300 Plus is also designed for monitoring projects and other applications. By using a powerful, adaptive detecting and canceling technology, the M300 Plus provides enhanced anti-jamming capability, which is critical for a reference station providing reliable GNSS data. Its built-in web server provides remote control of receiver configuration, status, firmware update and data download. It uses a 4G module as an internet backup, enhancing the stability of data connections.
The MQ-8 family — 3D lidar sensors and perception software — are part of Quanergy’s Flow Management platform. Designed with a new smart beam configuration, the MQ-8 solution delivers up to 140 meters of continuous tracking range, enabling up to 15,000 m2 of coverage with a single sensor. It is suitable for flow management applications such as security, smart city, social distancing and smart space industries.
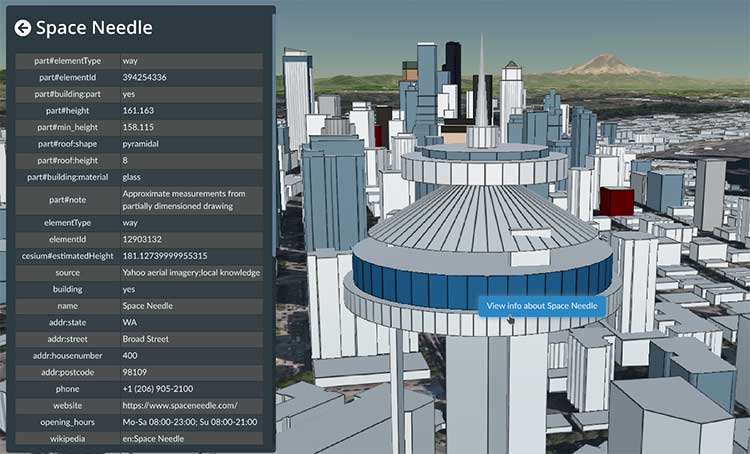
Cesium OSM Buildings expands the company’s suite of Global Base Layers including worldwide terrain, aerial imagery and streetmaps already available. With the new layer, 3D buildings can be visualized, styled and analyzed in an efficient and interoperable manner using 3D Tiles, the open standard developed by Cesium to stream massive 3D geospatial datasets. The layer gives geospatial developers urban context to 3D applications. The buildings are created for efficient visualization and are streamable to any device with 3D Tiles.Cesium OSM Buildings are derived from OpenStreetMap. Buildings are also regularly updated, firmly clamped to terrain, and individually selectable and styleable.
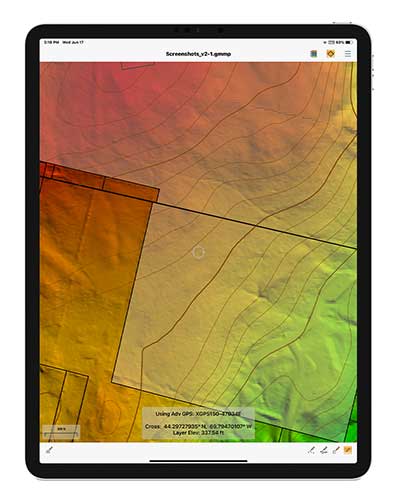
Version 2.1 of Global Mapper Mobile provides updates to both the free and Pro versions. The iOS and Android applications are designed for viewing and collecting GIS data, and provide situational awareness and location intelligence for remote mapping projects. A complement to the desktop version, the mobile app can display all supported vector, raster and elevation data formats. The release improves vector feature styling, terrain layer support and layer transparency setting. In the Pro version, it introduces advanced GPS support, allowing users to connect to external, high-accuracy Bluetooth GPS devices from vendors such as Eos Positioning and Bad Elf. It also allows access to detailed information including the satellite constellation, precise location information and the raw NMEA stream.
The AiRXOS Enterprise Energy Solution provides digital compliance, situational awareness of airspace and assets, inspection, emergency response/disaster recovery capabilities, analytics and asset performance tools in a connected platform. It runs on AiRXOS’ Air Mobility Platform — a secure, cloud-based, extensible platform that enables integration of an energy organization’s current applications and other UAS service suppliers. It brings all UAS lifecycle operations into one view, including infrastructure inspection, asset and crew management, and emergency operations after a natural disaster.
The Xeno FX is a fixed-wing platform optimized for efficient and cost-effective area survey and monitoring missions. Users can program the flight plan before launch to ensure thorough coverage of a target region. The fixed-wing design allows for efficient cruise and maximum time aloft. The Safe Launch protective feature means the propeller starts spinning only after the airframe has been safely hand launched. A quick-change modular payload system allows users to reconfigure their data-acquisition hardware for multiple missions. Constructed of Multiplex’s resilient Elapor foam, the folding wings make for compact storage and easy transport.
Not just supporting players, alternative positioning, navigation and timing (PNT) systems strengthen, augment and — when needed — replace GNSS. We explore how companies are using alternative PNT, and talk with John Fischer of Orolia and Alexis Guinamard of SBG Systems about their companies’ latest developments.
Since the 1990s, GPS has provided the United States military with a substantial tactical edge. Civilian GPS applications are now deeply embedded in every aspect of our lives. The U.S. Department of Transportation recently reaffirmed that GPS’ positioning, navigation, and timing (PNT) services are critical to the safe and efficient use of the national transportation system, and a Feb. 12 presidential executive order declared that satellite-based PNT services “have become a largely invisible utility for technology and infrastructure.”
It has long been equally well known, however, that GPS is vulnerable to accidental and intentional interference (the latter known as jamming), spoofing, and degradation or denial of signals. Additionally, GPS satellites are increasingly vulnerable to damage or destruction by space debris or intentional attack. The executive order mentioned above declared it U.S. policy “to ensure that disruption or manipulation of PNT services does not undermine the reliable and efficient functioning of [the country’s] critical infrastructure.”
Protecting PNT requires not just strengthening GPS, but also developing alternative sources of PNT data and ways to integrate them into the myriad systems that currently rely on GPS.
The National Timing Resilience and Security Act of 2018 (passed by the U.S. Senate as part of that year’s Coast Guard authorization act), called for “a complement to and backup for” the GPS timing component “to ensure the availability of uncorrupted and non-degraded timing signals for military and civilian users in the event that GPS timing signals are corrupted, degraded, unreliable or otherwise unavailable.” It mandated the procurement of a wireless, terrestrial system that would provide wide-area coverage and be synchronized with UTC, resilient and extremely difficult to disrupt or degrade, able to penetrate underground and inside buildings, and capable of deployment to remote locations.
A report released on April 8 by the Department of Homeland Security (DHS), however, recommends “that responsibility for mitigating temporary GPS outages be the responsibility of the individual user and not the responsibility of the federal government.” It points out that research by one of DHS’ agencies “shows that users can mitigate short-term GPS disruptions (e.g., inability to read a GPS signal) with various strategies, ranging from using local backup capabilities to delaying operations until GPS is restored.” The report then focuses on “mitigation against long-term or permanent disruption or loss of GPS PNT capabilities.” It determines that the PNT functions in critical infrastructure “are so diverse that no single PNT system, including GPS, can fulfill all user requirements and applications” and notes that maximum resilience is found in diversity of solutions. Therefore, it recommends that the federal government “encourage adoption of multiple PNT sources [to expand] the availability of PNT services based on market drivers.”
In the interviews below, I discussed these challenges with John Fischer, vice president of Advanced R&D at Orolia, and Alexis Guinamard, chief technical officer of SBG Systems.
Third Generation of the Ellipse Series of IMUs. Clockwise from top: Models D, E, A and N. (Photo: SBG Systems)
Not just supporting players, alternative positioning, navigation and timing (PNT) systems strengthen, augment and — when needed — replace GNSS. GPS World explores how companies are using alternative PNT, and talks with Alexis Guinamard of SBG Systems about the company’s latest developments.
GPS World: What are the main challenges to GNSS that require developing alternatives?
Alexis Guinamard: GNSS technology can be easily disturbed by a wide variety of factors. Urban canyons or foliage environments can obstruct GNSS signals or cause multipath effects. Intentional and unintentional jamming and spoofing are also a big concern for PNT users.
Alternative technologies are developed to add robustness to GNSS positioning and useful features like orientation tracking (inertial + GNSS), or ultimately to work in pure GNSS-denied environments (SLAM).
GPS World: What is your range of products?
AG: We develop and produce GNSS-aided inertial navigation systems, but also provide a post-processing software (Qinertia). Our latest innovation is the third generation of the Ellipse series — our best-selling product — which is an industrial-grade INS. Based on the same inertial core, we integrated cutting-edge technologies, such as a multi-frequency GNSS receiver and RTK capability, within a miniature form factor.
A multi-constellation, multi-frequency receiver is much harder to jam or to spoof, which makes the Ellipse-N very robust and able to operate despite interference.
Finally, the new Ellipse-D, which provides dual-antenna heading capability, has been drastically improved in terms of size, weight and power.
Our post-processing software is compatible with all our INS products. So, we can post-process these data to obtain centimeter precision in a PPK mode. Qinertia is running a tightly coupled navigation filter to obtain the best navigation performance in post-processed applications.Thanks to the raw data output of the Ellipse’s sensors, it’s really straightforward to do post-processing with Qinertia PPK software and obtain the highest level of accuracy.
We worked hard to make the user experience as easy as possible. The latest version of Qinertia allows the customer to process either INS systems with GNSS or purely GNSS data.
GPS World: What are primary uses of your systems?
AG: We have many advanced robotics applications, including UAV, driverless cars, and agricultural robots. We divide them into mapping applications, remote-sensing applications and control applications.
Inertial sensors can help a lot for the control applications because we are able to reject false GNSS measurements in both loosely and tightly coupled schemes. We can also use them to provide a precise heading, which is required by many of these applications. So, I would say that advanced robotics is one of the major growth areas for us.