Deere & Company has signed a definitive agreement to acquire Bear Flag Robotics for $250 million USD. Founded in 2017, Bear Flag is a Silicon Valley-based startup that develops autonomous-driving technology compatible with existing machines.
The deal accelerates the development and delivery of automation and autonomy on the farm and supports John Deere’s long-term strategy to create smarter machines with advanced technology to support individual customer needs.
Deere first started working with Bear Flag in 2019 as part of the company’s Startup Collaborator program, an initiative focused on enhancing work with startup companies whose technology could add value for Deere customers. Since then, Bear Flag has successfully deployed its autonomous solution on a limited number of farms in the United States.
The Bear Flag team consists of agriculture professionals, engineers and technologists focused on autonomy, sensor fusion, vision, data, software and hardware. They will remain in Silicon Valley where they will work closely with Deere to accelerate innovation and autonomy for customers across the world.
Continuous accurate navigation in all environments with sensor-based spoofing detection
Photo: U-blox
U-blox is introducing a series of automotive-grade positioning modules that are operational up to 105° C (221° F). The NEO-M9L modules and the M9140-KA-DR chip are built on the robust u-blox M9 GNSS platform and use dead-reckoning techniques to provide accurate position data when satellite signals are compromised or unavailable.
The u-blox NEO-M9L-20A and NEO-M9L-01A modules, as well as the M9140-KA-DR chip, are specially designed for first-mount automotive solutions. The modules and the chip are all automotive-grade, with the NEO-M9L-01A variant offering an extended operational temperature range up to 105 °C, making it suitable for integration on the roof, behind the windscreen, or inside hot electronics control units.
Applications include integrated navigation systems such as in-vehicle infotainment (IVI) and head units, integrated telematics control units and V2X.
The modules include new-generation 6-axis inertial measurement units (IMUs) that deliver low-latency 100-Hz RAW data output. The modules offer a low-latency 50-Hz position update rate, making it suitable for use in real-time applications. The automotive dead-reckoning (ADR) output combines the GNSS fix with IMU data to deliver accurate positioning output for various scenarios.
Additional GNSS-only output enables seamless integration into a variety of third-party applications. The receiver also supports wake-on-motion, which enables smart features such as theft protection and power-efficient designs.
The modules offer innovative sensor-based spoofing detection for advanced security and robustness. The chip offers protection against possible GNSS signal spoofing, which can cause navigation systems to report faulty position data or time.
“The u-blox M9 sensor-fusion products address the latest automotive market demands for quality, reliability and robustness. Availability and trustworthiness of position output are increased by using concurrent reception of four GNSS constellations,” said Aravinthan Athmanathan, product manager, Product Center Positioning at u-blox. “In addition, the spoofing-detection feature is brought to a new level compared to the predecessor. Paired with low-latency position output, attitude, and sensor data, the u-blox NEO-M9L is ready to meet current and future challenges facing the automotive market.”
All the module variants are compliant with AEC-Q104, the latest standard for ensuring the reliability of modules used in automotive applications. Engineering samples and evaluation kits will be available by the end of September.
AsteRx SBi3 enables highly accurate and reliable 3D mapping solutions based on sensor fusion with lidar
The AsteRx-SBi3 Pro+ in a rugged housing. (Photo: Septentrio)
Septentrio, a leader in high-precision GNSS/INS positioning solutions, and XenomatiX, provider of true solid-state lidar technology for autonomous applications and road management solutions, are starting a partnership enabling high-quality lidar solutions.
XenomatiX will be using the compact and robust GNSS/INS receiver from Septentrio, AsteRx SBi3 Pro+, to provide analysis of pavement conditions geolocated with millimeter accuracy.
Septentrio’s high-quality GNSS/INS will be a part of Xenomatix’ road lidar XenoTrack, used by road surveyors and road management companies. Septentrio’s AsteRx SBi3, a high-performance RTK GNSS/INS receiver with a dual-antenna setup, ensures centimeter-accurate geotagging of the XenoTrack point-cloud frames for relative and global millimeter accuracy over large distances.
Moreover, the GNSS/inertial measurement unit (IMU) integration algorithm enables dead reckoning — continuous positioning in environments of low satellite visibility where GNSS outages occur.
While traditional road scanning based on laser profilers rely solely on extremely accurate GNSS/inertial navigation system (INS) to stitch consecutive profiles together, the XenoTrack captures a 3D topography of an entire area in a single shot. The XenomatiX sensor-fusion algorithms combine visual SLAM techniques with GNSS, IMU and CAN to obtain a seamless map of the road shape.
Septentrio’s proprietary GNSS+ technology plays a key role in delivering the accuracy and reliability needed for XenoTrack. The company’s AIM+ advanced interference mitigation technology ensures robust positioning even in the presence of jammers, which may be aboard vehicles trying to avoid road tolling. When the sky is obstructed for an extended period, the built-in RAIM+ integrity algorithm serves as an indicator of when it is best to give priority to other sensor inputs to maintain a high-quality solution.
XenomatiX offers a complete mapping system as well as services including data from the XenoTrack sensor, camera and real-time kinematic GNSS/INS receiver with dual antenna in an easy-to-install solution on a standard vehicle.
Autonomous vehicles are being tested both on open roads and in controlled environments. (Photo: Trimble)
The advent of autonomous vehicles (AVs) is one of three revolutions in the automotive industry that will likely change this country as much as cars did over the last century. The other two are the conversion from internal combustion engines to electric ones and the integration of cars into digital traffic networks.
Once mass deployed, AVs promise to dramatically reduce the number of traffic fatalities (42,000 in the United States in 2020, a National Safety Council report shows). They will never be sleepy, distracted, aggressive or drunk — nor will they engage in such inane human driving behaviors as texting while driving, playing chicken with bicyclists, or running red lights. They also promise to reduce fuel consumption, harmful emissions and traffic congestion by optimizing routes and increasing the number of people using car services instead of owning their own car.
To realize this vision, however, cars will have to do a lot more than just find their way on their own. They will have to perform flawlessly in an unpredictable world that includes toddlers, reckless drivers, fallen trees, sinkholes, construction and accidents.
Among the many sensors aboard an AV, the GNSS receiver has a unique role. It is the only one that can provide absolute positioning, in the form of latitude and longitude coordinates, to within a couple of decimeters anywhere on Earth. As such, it is “a key enabler to a lot of the vehicles to know precisely where they are and whether it is safe to activate autonomous systems,” says Gordon Heidinger, automotive segment manager, Autonomy and Positioning division at Hexagon.
A GNSS receiver cannot achieve the level of accuracy required for autonomous driving without robust corrections. Fifteen years ago, the state of the art was real-time kinematic (RTK) corrections. However, “the cost of that equipment exceeded the cost of a small car at that time,” recalled Steve Ruff, general manager, On-Road Autonomy Division at Trimble. “They were targeting a system cost of about $200. Today, that number is below $50, including the antenna, the GNSS positioning engine, and the software that runs on it.”
Today, all automotive manufacturers are using a form of precise point positioning (PPP) corrections, which is a one-way broadcast, as opposed to the two-way communication between a base station and a rover required for RTK. This means that a single correction stream can serve an entire continent, Ruff pointed out. “Once a vehicle is manufactured, we will support it with our PPP corrections stream for at least 10 years, which is the typical service life of a vehicle.”
Obstacles to Adoption
To achieve mass-market adoption, AVs will have to overcome numerous and complex obstacles:
The technical difficulty of dealing with a limitless number of unanticipated challenges, such as poor visibility because of weather conditions, unpredictable human behaviors, complicated obstructions, detours and potholes
The need to map millions of miles of roads, develop vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, and protect vehicle software from hackers
The difficulty, if not the impossibility, of handing off control to a human quickly enough to be safe when the system is unable to deal with a complex situation
Questions about legal responsibility and insurance liability
Ethical dilemmas about how to program the system to respond in emergencies
The development of appropriate federal and state regulations
Resistance from paid drivers who fear losing their jobs, including 3 million U.S. truckers, and from many other drivers, who fear losing control over their safety.
Trimble has approached all the major car manufacturers, has several programs in development, and has received multiple positioning requests for information (RFIs), Ruff said. “In 2018, Trimble’s RTX corrections service was the first solution adopted for production use in passenger vehicles, providing absolute precise positioning for General Motors’ Super Cruise system.”
Additionally, Trimble is working with Qualcomm and with SiriusXM, which will deliver Trimble’s RTX corrections over its satellite network, just like it does with music. “It is a good partnership because about 80% of the vehicles in North America are coming equipped with SiriusXM radio technology,” Ruff said. “The OEMs do not have to buy any additional hardware.” RTX corrections can also enter a vehicle via cellular IP, L-band satellite broadcasts and, potentially, over a V2I link.
Hexagon has proposed a PPP solution for automotive, “mainly because we essentially have the world covered with base stations, and that is a hard thing to do,” Heidinger said. “We have been running a corrections network for a very long time.” PPP’s one-way broadcast offers better cybersecurity because the GNSS receiver does not have to disclose its position, he added.
Swift Navigation is building a global corrections network. To make it suitable for the automotive market, the company is aiming to make its corrections service affordable and scalable. “We realized quickly that neither of the traditional RTK and PPP approaches were going to meet those requirements,” said Fergus Noble, company co-founder and CTO, “so we invested in developing a corrections service pretty much from the ground up.”
RTK provides high accuracy and short convergence times but is typically costly to deploy because it requires a very high density of stations, Fergus explained. As a consequence, most providers do not have continuous coverage over a wide area. Conversely, while PPP is a true global solution, it is less accurate and takes a long time to converge. “That may be fine in a marine or land-surveying application, but not if you are driving through city tunnels and bridges and need it to be able to reacquire a high-accuracy position within a matter of seconds. Therefore, we took a hybrid approach, together with a lot of new IP that we developed.” The service provides coverage in all the United States and most of Europe, and is being tested in Japan, South Korea and Australia.
Accuracy and Integrity
A common target accuracy for lane-level positioning is 20 cm 95% of the time. That means that AVs need to know when their positioning accuracy falls beneath that threshold. “We are building into our positioning solutions an accuracy metric that is output along with the position information we are providing,” Ruff said. “[The metric] can be used by the intelligence in the system to decide whether it can rely on the GNSS solution or needs to switch to one of the other complementary technologies because GNSS accuracy is not fulfilling its lane discipline.”
Heidinger noted the importance of economies of scale when mass-producing vehicles, where cost and ease of manufacturing become factors. “We can take some of our high-end equipment and get you 2 cm of accuracy with this technology, but the price point and the feasibility of this going into mass production for automotive is not favorable,” he said. “So, we’ve taken the approach of providing a software positioning engine that can be fit onto any hardware.”
Hexagon is developing products in partnership with STMicroelectronics, using the company’s Teseo V family of measurement engines. “ST is one of the established leaders of automotive GNSS solutions,” Heidinger said. “We take their measurements and put our positioning and corrections solution behind that to give positioning with lane-level accuracy.”
Noble agrees on the importance of knowing the reliability of a vehicle’s GNSS-based lane accuracy. The prevailing approach, which fuses data from GNSS and other sensors, makes it acceptable for one data source to be temporarily unavailable if the system is aware of that outage, he said. “That is where you start to see Swift, and others as well, focusing on the notion of integrity.”
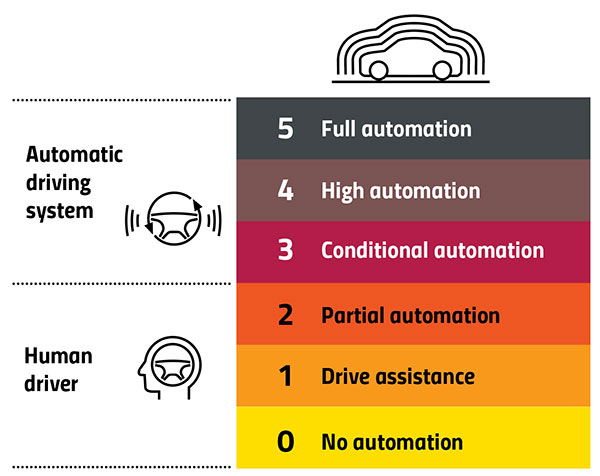
An AV’s level of autonomy determines its behavior during GNSS outages. For systems with Level 2 autonomy and below, the driver must remain engaged, while Level 2+ and Level 3 systems will alert the driver to retake control when needed. If a driver of a Level 2+ or higher system fails to reengage, the AV’s reaction depends on the system and manufacturer.
“When we start to see Level 3 or above self-driving systems come onto the market, they will require that the GNSS component has an ISO 26262 safety certification,” Ruff said. “Many companies, including Trimble, are going through, or have gone through, the process of safety-certifying their offerings. As part of the AV system’s safety architecture, they will build in the capability to safely curb the vehicle if the system detects a malfunction or a spoof or some other type of problem.”
Automation Levels
In 2014, the international Society of Automotive Engineers released a standard, adopted in 2016 by the U.S. National Highway Traffic Safety Administration, that classifies cars in six levels, ranging from Level 0 (no automation) to Level 5 (full automation, meaning vehicles that can handle the full spectrum of road and traffic scenarios without any assistance from the driver). While many production models already incorporate various forms of Level 1 driver assistance, no current production car exceeds Level 2, or partial automation, which requires the driver to monitor the vehicle’s surroundings and take over as necessary. No test vehicle has yet achieved Level 5.
Image: GPS World
Other Sensors
Beyond lane-level positional accuracy, safe driving also requires avoiding collisions with other vehicles in the same lane or straying into it. Cameras, lidar and radar will detect other vehicles as well as fixed infrastructure and random obstacles, measure their distance, and monitor their movement.
While lidar scanners are better than cameras as detecting sharp-edged features, such as curbs, cameras are better at detecting and interpreting visual cues, such as road signs and the location and curvature of lane markers. In bad weather, radar is essential, because radio waves, unlike light waves, can penetrate rain, snow, fog and even dust, enabling radar to “see” where cameras and lidar cannot. However, radar sensors cannot see much detail, and cameras do not perform well in conditions with low light or glare.
Besides providing data about a vehicle’s trajectory, inertial navigation systems (INS) also measure its attitude (roll, pitch and yaw), enabling the software to better correlate and interpret data from the other sensors.
For example, when a car brakes sharply, its front end goes down; any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface.
INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and the vehicle’s true heading. A slip angle as small as 0.5 degrees can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks. Wheel-speed sensors also help verify the vehicle’s movement.
“All these technologies have their limitations,” Ruff said. “However, if you design the system, including all these technologies, then you can come up with a robust, safe combination that will enable autonomous driving.”
In addition to helping to avoid collisions, these other sensors provide relative positioning by comparing the images they acquire with highly precise maps to help locate the vehicle, especially in urban environments, which are well mapped and rich in recognizable landmarks.
Imagine an AV moving through different environments. It might travel from a city with urban canyons that degrade GNSS navigation, yet with landmarks that help relative positioning, to a rural environment devoid of both. The AVs’ algorithms must constantly weigh how much to rely on the different sensors. “Many of the OEMs and car companies are seeing that even rain mist on a highway is very bad for lidar and cameras, because it creates a big blur, but that is where GNSS will perform really well because it is open sky,” Heidinger said. “So, the two types of sensor systems complement each other very well.”
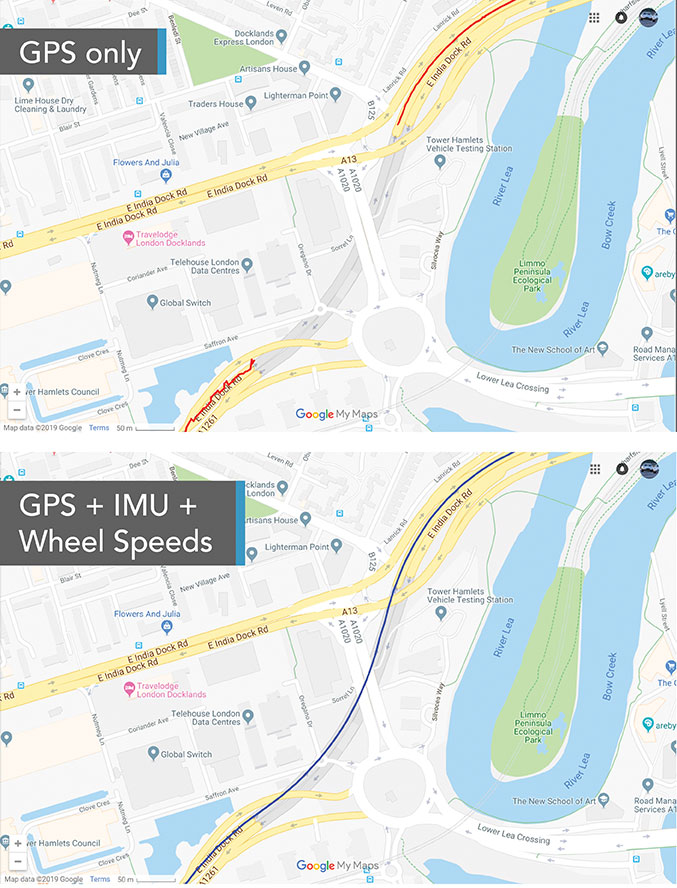
“Odometry sensors, such as a wheel-speed sensors, minimize any potential drift and add robustness to data that may have a GNSS outage of greater than 5 seconds, such as longer tunnels,” said Wesley Hulshof, principal engineer – ADAS Testing at Racelogic.
Photo: Racelogic
Noble sees a split in the industry. Companies such as Waymo and Cruise are pursuing Level 5 autonomy and are “heavy users of lidar” as well as other sensors. Companies such as Swift are focusing on Level 2 and Level 3 series production vehicles. “If you are making a mass manufactured vehicle for the production market, it rules out using a lidar sensor,” Noble said. “It is just too costly and complex right now to use. So, typically, if you look at the systems that are out on the market today, such as a Tesla Autopilot or a GM Super Cruise, they are very reliant on the camera as the primary sensor. Obviously, also inertial and some use of radar.”
Maps and Communications
While accurate and up-to-date maps have an important role to play in making autonomous driving possible, the more detailed maps are, the more the world they describe is constantly changing.
Meanwhile, the sensors keep improving and dropping in price, making maps less important. In the end, AVs — like human drivers — will probably rely much more on their ability to “see” and analyze their environment moment-to-moment.
Also like their human counterparts, they will gain experience. Unlike human drivers, however, AVs will be able to instantly share their experience with every other vehicle in their area via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
V2V communications will enhance safety by informing AVs of the trajectories of nearby vehicles. If a vehicle is speeding toward an intersection and not slowing for a red light, it will be communicating its position and trajectory to other cars over a V2V link, Ruff explained.
“Then your car can make the intelligent decision to pump the brakes and avoid that collision. The same positioning stack that operates as part of the AV stack can also be used to support V2V-type applications, and the position of the vehicle will be much better than what the current V2V spec states.”
Different Approaches
Each GNSS manufacturer is taking a different approach to AV positioning.
The worlds of traditional automotive positioning and the products on which NovAtel has historically focused are coming together, Heidinger said. “The autonomous technology is demanding it and pushing for higher performance and safety-of-life functionality. Hexagon is bringing high-performance positioning solutions to the automotive industry in a manner that accepts automotive manufacturability, quality and efficiency.”
The company has also joined the 5G Automotive Association (5GAA), a large consortium developing AV solutions. “There are probably 100 companies in the industry coming together and helping to develop that vehicle-to-network communications solution, including telecom partners and automotive partners, and we are providing the GNSS expertise,” Heidinger said. “To meet the high-volume production-intent applications, including automotive quality, we recently developed a receiver based off the ST Teseo V family of measurement engines. We have an ST Teseo V set of chips on the PIM 222A product that launched in May geared exactly toward the automotive market.”
By contrast, Trimble is not focused on providing GNSS receivers or other hardware. “We allow the Tier 1 automotive manufacturers to architect the system using the components that they have selected from their preferred suppliers,” Ruff said. “We tailor our positioning solution to work with their architecture. So, we are agnostic as to the selection of the GNSS receiver, the IMU, the operating system running on the host system, and the host processor that runs the software. We can adapt our stack to run on virtually any system, using measurements from any GNSS source that meets our API requirements.”
For Swift, its “vision from day one has been to bring this type of precise positioning technology to mass market applications, such as automotive, which is a big focus for us,” Noble said. “That includes autonomy, but also ADAS, HD navigation and V2X. We do not want to be a hardware supplier in the automotive supply chain. Our boards are focused on professional and industrial markets.”
Swift’s automotive software, called Starling, runs on the vehicle’s computer. To generate a precise position, it ingests raw sensor data, as well as corrections data from the company’s Skylark network. “We focus on providing a precise-positioning stack that layers on top of any of this current generation of low-cost, automotive-grade receiver hardware from companies like STMicroelectronics.”
This test in London shows the value of inertial and wheel speed sensors. (Image: Racelogic)
The Future
Speculation abounds as to when AVs will enter mass production and how the transition from human to robotic drivers will take place. “There might be a ‘classics only’ lane in the future,” Heidinger said “that will be the only place where cars are allowed to be driven manually.”
Safety-enhancing automotive devices typically start out as optional extras, then get incorporated into best-practice standards promoted by independent bodies. Eventually, they become compulsory.
Some automakers have committed to creating their own AVs, while others are intent on creating a turnkey solution to transform conventional cars into driverless models. However, the initial market for AVs likely will be commercial fleets rather than individual consumers.
“It will still take quite a few years before we see cars take over and drive themselves, because legislation, insurance and these sorts of things will have to happen along with the technological advances,” Heidinger said. “But the positioning side is becoming more defined. We are seeing things like L5, the Galileo constellation, coming in and becoming more available. There are more constellations providing more data for use in our solutions, so that is promising.”
Swift’s Noble said, “Most of the major manufacturers working on Level 2+ and Level 3 systems are realizing that precision GNSS will be a key component of their architecture. Most of the major OEMs have signaled some level of intent to integrate this technology. Most are tracking to start the program next year,” he added.
“We envision that in five or six years every vehicle will have a single positioning utility on board that will serve all the location-aware applications on the car — whether it is an autonomous vehicle, V2V or V2I,” Ruff said. “It will meet the most stringent accuracy requirements from all the applications and serve navigation, telematics, security, V2X and AV/ADAS applications.”
A technician scans for UXO on steep terrain in a wooded GPS-denied area. (Photo: Kaarta)
Kaarta and Exploration Instruments have announced a collaboration and distribution agreement to address the needs of the unexploded ordnance (UXO) and geophysical industries.
Kaarta provides real-time mobile 3D reality capture, and Exploration Instruments LLC (EXI) has expertise in near-surface geophysical equipment and applications.
EXI now offers rental, sales, and training for Kaarta’s SLAM-based mobile mapping systems and the integration with geophysical equipment such as digital geophysical mapping (DGM) and advanced geophysical classification (AGC) sensors.
Contamination and munitions from former combat areas or military training grounds is a global hazard. In the U.S. alone, more than 5,400 sites covering millions of acres have been identified for investigation and environmental restoration according to the U.S. Army Corps of Engineers.
The general remediation approach pinpoints buried ordnance location using electromagnetic and magnetic detection systems with GNSS positioning technology. While these systems perform well in open areas, other common environments such as steep terrain and wooded areas under tree canopy are challenging to find and remediate UXO.
The most common method for achieving required positional accuracy for DGM or AGC in wooded terrain is the use of robotic total stations (RTS) to tie surveyed locations to detection systems. However, RTS line-of-sight requirements make mapping and classification difficult and time-consuming, resulting in slower production rates and increased effort as data-collection teams must revisit common data gaps in the RTS coverage to achieve 100% coverage of the mappable areas.
Kaarta’s simultaneous location and mapping (SLAM) solution provides accurate global positions within several centimeters in these demanding environments. Kaarta Stencil 2-16 mobile mapping system combines lidar, an inertial measurement unit (IMU) and visual odometry measurements to build a 3D map of the environment while updating global position data in real-time when moving through the map, without the need for external signals such as GNSS.
The U.S. Army Corps of Engineers tested Kaarta’s Stencil 2-16 to provide rapid positioning data in GNSS-denied areas and found it provides positional data with the required accuracy for DGM and AGC at military munitions response sites.
Kaarta systems are successfully integrated and used with a range of geophysical equipment including Geometrics MetalMapper 2×2, Geonics EM-61, and White River Technology’s APEX systems. EXI ties it together by providing geophysical expertise, training and access to the latest equipment through both rental and sales. Stencil 2-16 integration with other sensors is easy using customizable GNSS NMEA strings and supports a wide range of RS-232, USB and Ethernet interfaces.
“It’s exciting when a combination of technologies come together to address such a significant problem as locating UXO in the most challenging of environments,” said Dave Duggins, UXO applications specialist at Kaarta. “We’ve been out in the woods with customers and are thrilled with the results we’ve achieved which include increased production rates with fewer personnel. Partnering with EXI to bring this solution to market is a perfect match.”
“There are hundreds of thousands of wooded acres that still need to be remediated,” said Dennis Mills, EXI’s President, “Providing geophysicists with a proven integrated solution that significantly improves productivity over current methods is a win all around.”
Kaarta systems can also be integrated with other sensors that use GNSS for positioning – ground penetrating radar, magnetometers, terrain conductivity meters — for a wide range of applications where positioning is needed in GNSS-denied areas. Kaarta was recently issued a patent covering its novel approach to fuse data captured by SLAM systems with data from other sensors to measure and localize sensed data in the scanned environment.
EXI will be the primary provider of Stencil 2 rentals, sales, and training to the UXO and geophysical industry.
As illustrated here, the new HG1125 IMU is about the size of a water-bottle cap. (Photo: Honeywell)
Honeywell has launched a new series of miniature inertial measurement units (IMUs) ruggedized to offer high accuracy along with the durability to survive high-shock environments.
Roughly the size of a water-bottle cap, the new HG1125 and HG1126 IMUs are low cost and serve both commercial and military applications.
The new family of IMUs can survive shocks up to 40,000 G-force, making it one of Honeywell’s toughest IMU products to date. The HG1125 and HG1126 can be used for a variety of defense and commercial applications such as tactical military needs, drilling, unmanned aerial vehicles or navigation systems for general aviation aircraft.
“Low-cost, ultra-rugged IMUs are in high demand across a variety of market segments where customers need high-performance navigation, but they’re limited by size or cost constraints,” said Matt Picchetti, vice president and general manager, Navigation & Sensors, Honeywell Aerospace. “Our new HG1125 and HG1126 products meet all of these requirements, making them an ideal solution for customers operating in a wide variety of high-shock environments, including everything from military tactical operations to industrial applications such as drilling.”
An IMU uses gyroscopes, accelerometers and electronics to give precise rotation and acceleration data. This enables a vehicle system to calculate where it is, in what direction it is going, and at what speed, even when GPS signals are not available.
The HG1125 and HG1126 use sensors based on micro-electromechanical systems (MEMS) technology to precisely measure motion. They are the newest IMUs from Honeywell’s tactical IMU production facility, which delivers nearly 100,000 IMUs each year to customers across a wide range of segments.
The first deliveries of these new products are set to begin in June.
Honeywell’s lineage in navigation dates to the 1920s, and it has long been a pioneer in MEMS-based IMUs. Honeywell has developed and manufactured high-performance navigation solutions found on many aircraft and other vehicles worldwide.
By expanding its GNSS/INS product family, Septentrio starts offering more application-specific positioning and orientation solutions
Septentrio, a leader in high-precision GNSS positioning solutions, has launched the AsteRx-i3 — a new product line of high-performance GNSS plus inertial navigation system (INS) receivers.
The AsteRx-i3 product family brings to market an array of next-generation receivers from plug-and-play navigation solutions to feature-rich receivers with raw measurement access. OEM boards are available for rapid integration as well as ruggedized receivers enclosed in a waterproof IP68 housing.
The variety of products in the AsteRx-i3 line accommodates the specific needs of applications that require high-accuracy positioning together with 3D orientation, heading, pitch and roll angles.
The AsteRx-i3 Pro+ in a rugged housing. (Photo: Septentrio)
“Using our off-the-shelf GNSS/INS systems allows our customers to focus their efforts on core technology and to reduce their products’ time-to-market,” said Danilo Sabbatini, product manager at Septentrio. “With this new generation of products, we aim to satisfy specific needs of various customers. Instead of releasing a single general-purpose product, we bring several dedicated solutions for fastest and easiest integration into systems that require robotic navigation or sensor fusion.”
AsteRx-i3 Pro+ receivers support either single- or dual-antenna modes. The single-antenna mode is suitable for compact and light-weight configurations. The dual-antenna mode reduces the need for movement during IMU initialization, allowing fully informed navigation from mission start.
The AsteRx-i3 product line includes five new GNSS/INS receivers.
The Pro receivers offer high accuracy positioning with 3D orientation and dead-reckoning functionality for fastest and easiest plug-and-play integrations.
The Pro+ are the most versatile receivers providing integrated positioning and orientation along with raw measurements, in single- or dual-antenna configurations, suitable for applications with sensor fusion. One of the receivers offers an off-board inertial measurement unit (IMU), which can be mounted exactly at the alignment point of interest.
The ION GNSS+ 2021 technical program is online, and registration for the event is now open. ION GNSS+ 2021 takes place Sept. 20-24 at the St. Louis Union Station Hotel in St. Louis, Missouri.
ION GNSS+ 2021: GNSS + Other Sensors in Today’s Marketplace, is the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, and the world’s largest technical meeting and showcase of GNSS and GNSS-related technology, products and services.
“It’s exciting to be meeting in-person in St. Louis,” said Lisa Beaty, ION executive director. “We are expecting a pent-up demand as the community is eager to convene and get caught up. The ION GNSS+ 2021 technical and commercial exhibit is the best opportunity of the year to see what’s been happening in PNT [positioning, navigation and timing].”
ION GNSS+ 2021 features more than 300 technical presentations under two technical tracks: Commercial and Policy, and Research. The opening Plenary Session will feature two keynote addresses: “Towards a Smart Digital Reality: Building a Sustainable Future,” presented by Burkhard Boeckem, and “Artemis: Return to the Moon” presented by Steven Clarke, NASA.
For those unable to attend in person, ION GNSS+ 2021 will include a virtual option. Registration offers access to all on-demand conference content, live streams of select sessions, proceedings, as well as recordings of the sessions that were live streamed during the conference. ION GNSS+ Virtual Registration includes virtual contact with ION GNSS+ exhibitors and CGSIC’s technical program.
To view the ION GNSS+ 2021 technical program and to register, go to ion.org/gnss.
Image: metamorworks/iStock/Getty Images Plus/Getty ImagesChris Hogstrom, Spirent Federal Systems
Inertial navigation systems (INS), like most navigation systems, have evolved through countless iterations and improvements over many years. An INS, unlike other navigation technologies, does not rely on any external signals or inputs to aid navigation. It is, therefore, extremely difficult to spoof, jam or disrupt the system, and solar flares, ground/sky visibility and climate do not affect its ability to aid in navigation — unlike GNSS.
An INS knows where it is going because it knows where it has been. Modern INS use a minimum of three orthogonal accelerometers to measure accelerations in the x, y, z planes and a minimum of three orthogonal gyroscopes to measure the angular accelerations about the x, y, z planes. When the INS is initializing, its current location is fed into the system. After initialization, the INS utilizes the sensor outputs to determine its position relative to its starting point.
The INS made its debut during World War II, where it was used to guide German V2 missiles. At the time, the INS was still rather primitive, using two two-degrees-of-freedom gyroscopes and one integrating accelerometer. It wasn’t until the war’s end that Wernher von Braun and his team developed a stable platform with three single-degree-of-freedom gyroscopes and an integrating accelerometer.
World War II Innovation
Once the war was over, the United States Army acquired many of the lead scientists from the German V2 project and furthered research into INS. The Air Force also had an interest in INS and contracted Northrop Aircraft (now Northrop Grumman) to develop the guidance system aboard the SNARK cruise missile. However, the work under Charles Draper at MIT’s Instrumentation Laboratory spearheaded INS for use in aircraft. Draper was an amateur pilot and quickly saw the benefits that a self-contained system provided over the navigation systems of the day. The developments made by the Instrumentation Laboratory led to the success of the inertial-guided transcontinental flight in 1953.
By the late 1960s, military bombers and aircraft used INS, and by the early 1970s, it was commonplace in commercial aircraft, too. Today, INS technology can be found in aircraft, spacecraft, ships and submarines, as well as smartphones, watches and other wearable tech. It has quickly become an essential enabling technology for autonomous vehicles, and future applications are being studied.
The biggest weakness of INS is that they drift over time. This means that the longer an INS functions, the less accurate it becomes. For this reason, many INS are part of a sensor-fusion system. Incorporating data from many different sensors — such as GPS, a barometer, a compass and INS — a sensor-fusion system combines data through a Kalman filter to determine a more reliable and accurate positioning and navigation solution.
Best of Both Worlds
By combining INS with GPS, you get the benefit of both systems while minimizing their weaknesses. GPS and other GNSS have quickly become the gold standard for accurate positioning, as well as being the only global source of absolute position. Receivers tracking four or more satellites can provide their precise location anywhere on Earth.
However, GPS has significant and well-documented weaknesses. These stem, primarily, from the fact that GPS signals are extremely weak by the time they reach terrestrial users. This means that GPS signals, intentionally or otherwise, are easy to jam, and the broadcast nature of the signals means they are open to a variety of spoofing attacks. Fusion systems using an INS and GPS receiver can rely on GPS when the GPS signal is unobstructed, and switch to the INS solution when GPS is unreliable.
In a world where aircraft are now able to fly themselves and cars are quickly achieving autonomy, our dependence on these sensors is ever-increasing. Autonomous solutions with a navigation sensor suite of multiple sensor types are becoming common. Sensor suites can include other vehicle sensors that aid absolute positioning by sensing parameters such as steering angles, wheel rotations, etc. They are also beginning to incorporate non-GNSS-based RF signals to aid in navigation. Multiple sensors offer increased redundancy, helping achieve the required safety levels and the desired performance boundaries.
High-Mileage Testing
Testing and optimizing these sensor-fusion systems presents a serious challenge, especially in the transportation sector. Testing on a live platform can be hugely expensive and lacks any chance of repeatability. For these reasons, simulation is critical. In addition, representative models must take into account the impact of the environment and the dynamics of the vehicle frame (where sensors are installed) to achieve the requisite realism.
My company, Spirent Federal, has spent the past 20 years building sophisticated and robust test solutions so that sensor-fusion systems can be fully tested and characterized. Thorough testing increases performance and reliability in safety- and mission-critical applications.
Specifically, our GSS7000 and GSS9000 GNSS simulators deliver the precision and fidelity needed for high-performance applications, while our inertial emulation platforms incorporate the key industry models of both inertial measurement units (IMUs) and embedded GPS/inertial (EGIs) for dynamic integrated testing in the lab.
We work closely with major defense contractors, such as Northrop Grumman and Honeywell, to provide robust test solutions as well as alternative RF PNT simulation capabilities.
In addition, hardware-in-the-loop incorporation with ultra-low latency, modeling signal propagation in a 3D environment — and the ability to “shift left” with software-only testing — are what helps to make Spirent Federal the trusted partner in sensor fusion development.
Chris Hogstrom is an engineer with Spirent Federal Systems.
Vision-RTK enables applications in previously unreachable areas and unlocks new possibilities for autonomous ground robots and drones
At this year’s Intergeo Digital event, taking place Oct. 13-15, Fixposition is debuting the Vision-RTK positioning sensor, a compact centimeter-accurate solution with high reliability and availability in environments that are challenging for traditional GNSS.
Photo: FixPosition
The Vision-RTK’s sensor-fusion algorithm is based on the deep integration of satellite, camera and inertial sensors, and enables unprecedented reliability and availability in diverse and challenging applications, the company stated.
“The highly integrated nature of our Vision-RTK sensor and our deep expertise in computer vision and real-time kinematic (RTK) GNSS enabled us to implement completely new approaches in sensor fusion, resulting in previously unseen performance,” said Lukas Meier, CTO and co-founder of Fixposition.
Traditional GNSS sensors suffer from limited reliability in GNSS-challenging and denied areas. On the other hand, standalone computer vision is sensitive to light conditions (such as snow, strong sunlight and rain) and struggles in situations where there is a lack of features such as cornfields and grass. Errors accumulate over time with standalone inertial technology, causing large drifts.
As a result, devices using either sensor are limited in their range of operation and are likely to fail in certain conditions. Fixposition’s solution increases the potential of these sensors with its unique sensor-fusion technology by increasing the trustworthiness of the positioning accuracy and the range of operation in different environments.
The real-time sensor fusion provides centimeter-accurate absolute positioning at any time, in any outdoor environment. This small module integrates two RTK-GNSS receivers and visual inertial navigation, and is suitable for applications where size and accuracy are of paramount importance.
The dual-receiver configuration, together with Fixposition’s advanced algorithms, provides a true-heading output and increased resistance to electromagnetic radiation.
The sensor provides USB and Wi-Fi connectivity and a web interface. It enables straightforward integration in state-of-the-art autopilot control systems for drones and robots. It’s also plug-and-play compatible with platforms such as PX4, ROS and Apollo.
For ground robotics and drones applications, Vision-RTK increases the device uptime and efficiency while enabling new market segments in areas previously inaccessible. For end-device manufacturers, this technology eliminates the need for an in-house development of advanced localization solutions, shortening their sales cycle and reducing costs and investments.
Visit the Fixposition booth and meet the team at Intergeo Digital 2020 to learn more about the Vision-RTK sensor.
CHC Navigation has released the new CGI-610 GNSS/INS sensor, a high-precision dual-antenna receiver offering reliable and accurate navigation and positioning solutions for demanding land, marine and aerial applications.
The tight fusion of the latest GNSS technology with an industrial-grade MEMS IMU is powered by CHCNAV’s algorithms to deliver accurate hybrid position, attitude and velocity data, even in complex and obstructed environments where GNSS outages can occur.
The CGI-610 is a powerful GNSS/INS system supporting data output up to 100 Hz to meet the requirements of highly dynamic applications (including airplane, train and automobile). The optional external odometer sensor for ground vehicles can provide an additional independent measurement of displacement and speed, which is fused with the GNSS/INS navigation solution.
“The CGI-610 GNSS/INS sensor is the perfect answer to the growing demand of robust positioning and navigation systems for the control of any unmanned vehicle and machine, as well as for highly dynamic applications,” said George Zhao, CEO of CHC Navigation. “Industrial system integrators in need of a reliable GNSS/INS sensor with an exceptional price/performance ratio would definitely consider our CGI-610.”
With its 4G modem, CAN and serial ports, the CGI-610 GNSS/INS sensor offers unparalleled compatibility to enable a wide range of applications including machine control, port automation, advanced trajectography, robotics and unmanned vehicles. The CGI-610’s industrial design ensures reliable and consistent operation in the harshest environments.
New hardware-in-the-loop application programming interface (API) for GNSS simulators enables greater accuracy, integrity and control for growing sensor fusion testing needs
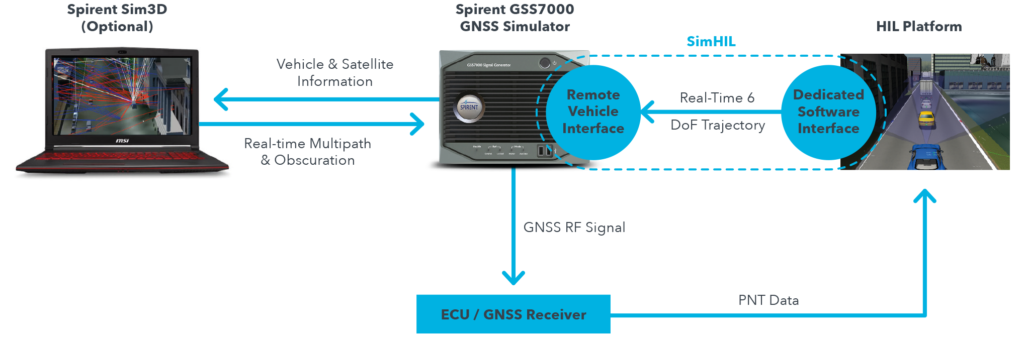
Spirent Communications plc has released SimHIL, an integrated hardware-in-the-loop (HIL) testing software API for Spirent GNSS simulators.
SimHIL brings high-fidelity GNSS signal simulation with low latency to automotive industry HIL testbeds, the company said.
Image: Spirent
Spirent’s SimHIL software has been developed to meet the automotive industry’s growing need for realistic positioning, navigation and timing (PNT) testing for sensor fusion. As customers apply increasing pressure on car manufacturers for more advanced driver-assistance system (ADAS) features and advanced infotainment systems, test labs need to be able to combine Wi-Fi, camera, lidar, radar, inertial and GNSS data that power these advanced automotive systems.
SimHIL helps test engineers bring accurate, controlled and coherent data from GNSS and inertial sensors to their sensor-fusion algorithms within HIL test environments. Facilitating the ultra-low latency, complete control, enhanced realism, and ease of use and setup of Spirent GSS7000 and GSS9000 GNSS simulators, SimHIL is suitable for OEMs and tier-one suppliers developing ADAS, V2X and sensor-fusion engines.
The new SimHIL API enables:
external motion input – real-time direct motion and trajectory data input from simulators
sensor fusion – introducing GNSS signals into sensor-fusion engines
V2X testing – validation and performance benchmarking of V2X applications
infotainment system testing – real-time scenario feedback to system and driver responses
vehicle-in-the-loop (VIL) – final production form product testing
accurate testing – reliable results supported by ultra-low latency simulation. Criticality of ADAS features, such as lane assist and automatic braking, mean that 3+ metres of uncertainty introduced by higher latency systems is not sufficient.
“With our SimHIL software and GNSS simulators, test engineers can bring realistic, controlled GNSS simulation to their HIL testing environments – a vital requirement in a world where ADAS features are relying more heavily and critically on accurate positioning,” said Martin Foulger, general manager of Spirent’s PNT business.
Spirent has worked with leading suppliers to ensure SimHIL is compatible with their HIL platforms, and because of its open API, there’s broad scope for additional custom third-party integrations.
“When used with our GSS7000, SimHIL latency is less than 40 ms from motion command to RF output and supports all GNSS and SBAS signals,” said Ricardo Verdeguer Moreno, product manager for Connected and Autonomous Vehicles at Spirent. “SimHIL is also compatible with all the options and features available in Spirent’s GNSS simulators, including ionospheric and tropospheric modeling, antenna patterns, date and time settings, and obscuration and multipath effects via Sim3D.”
Users can easily configure and control both the GNSS scenarios, and signal generation and vehicle motion from within the HIL simulator graphical user interface — saving time and the possibility of error.
Spirent is also offering three service packages alongside SimHIL to help customers mitigate project risk and reduce the time from delivery to useful deployment.
For more information about Spirent’s SimHIL integrated testing for Spirent GNSS simulators, visit the SimHIL information page.