PORTLAND, Ore. — Two weeks ago, I attended (and hosted) the Field Technology Conference here in Portland, Oregon. This is the fifth year of the conference. In years past, it’s had a forestry emphasis primary because the Western Forestry and Conservation Association has been a major partner in organizing it.
This year, the Pacific States Marine Fisheries Commission and Pacific Northwest Aquatic Monitoring Partnership joined the organizing committee. The result was a 50-percent increase in attendance and a more diverse audience.
Another newcomer to the conference was a Civil GPS Service Interface Committee (CGSIC) U.S. State and Local Government Subcommittee meeting, which was co-located with the Field Technology Conference, offering a direct connection between civil GPS users and U.S. government representatives who are involved in GPS.
The conference was a two-day event comprised of three technology tracks: a track for general field technology and two tracks for industry-specific (forestry and fisheries) subjects, hands-on technology demonstrations and a field trip. Although forestry and fisheries professionals were the featured user groups, nearly all of the subject matters — GPS, UAVs, smartphones, tablets, laser rangefinders, lidar, photogrammetry, and field data-collection software — is applicable for a wide range of natural resource users involved with GIS (geographic information systems) technology.
As one of the hosts of the conference, I started out moderating the general session with all of the attendees in one room. This year, my general session topics include geospatial awareness and growth, GPS/GNSS technology, mobile devices (smartphones and tablets) and UAVs.
Something new I tried this year, which worked out really well, was using audience response “clickers.” These small handheld devices were given to each audience member and allowed them to answer multiple choice questions that I posed in my Powerpoint presentation. I’ve always been a fan of audience input, and started polling the audience during webinars I conducted many years ago. For this conference, I used an audience polling system from Turning Technologies. I’d like to share with you the questions I asked the audience and the responses that I received.
Question #1: Are you here?
Comment: This was a test question to see if the audience response system was working properly. I’m still not sure if the audience just had a great sense of humor or a technical problem. I think the former was true. ☺
Question #2: Have you attended this conference before?
Comment: This was great news that the conference is attracting new attendees. It’s an annual event held in November, so keep your eyes on it for next year!
Question #3: After a brief discussion about the availability of higher accuracy geospatial data (eg. GNSS, UAVs, etc.), I was curious about the level of accuracy the audience required in their typical tasks.
What geospatial data accuracy do your typical tasks require?
Comment: I wasn’t sure what to expect with this question, but since I’ve polled a fisheries audience before, I had a feeling accuracy requirements would vary, and they did. Previously, a fisheries audience had told me that they were satisfied with 5-meter accuracy.
Question #4: The last question leads to this one. I wondered if the audience accuracy requirement was driven by requirement or by availability.
Are you satisfied with the accuracy of the geospatial data you use?
Comment: The answer is clear that, generally speaking, the audience would use higher accuracy geospatial data if it was available.
Question #5: The next question was a pure technology one. In the day of BYOD (Bring Your Own Device), I’ve been very interested in monitoring the trends in mobile devices. The question about operating systems is relevant because it determines which data collection software you can use. For example, if a specific data-collection software is written only for Windows, it will not run on an Android or Apple (iOS) device.
Which operating system do you use on your mobile device(s)?
Comment: These responses surprised me a bit. They certainly don’t match the global market share figures that I’ve read. Following are the latest mobile device operating system market share numbers reported by IDC and Statista.
Question #6: The next part of my presentation discussed unmanned aerial vehicle (UAV, also known as UAS or drone) technology. UAVs were a significant part of the conference this year. We had many presentations and some static demonstrations on UAV technology. On this subject, I had several questions for the audience.
Do you currently use a UAS?
Comment: These answers were not surprising. Flying UAVs commercially in the U.S. requires a special permission from the Federal Aviation Administration (FAA). To date, the FAA has only issued about 2,000 such exemptions.
Question #7: Do you anticipate using a UAS?
Comment: These answers surprised me a bit. I had no idea the audience would be so interested in personally flying a UAV. This has me thinking about this the same way I think about GPS receivers — just another tool in the toolbox.
Question #8: How much are you willing to spend on a UAS?
Comment: These responses don’t surprise me, although I polled another audience at a different venue that was more engineering-oriented, and the answers were a bit different. The engineering-oriented audience was willing to spend more for a UAV.
Furthermore, in speaking with various attendees during the conference, there was quite a bit of interest in attaching different sensors to UAVs for various requirements. For example, lidar, multi-spectral and thermal (temperature) sensors were commonly mentioned as payloads they would like to see. The challenge is that the cost of a UAV rises sharply when these types of payloads are accommodated, and conflicts with the audience’s response about how much they are willing to pay for a UAV.
In next month’s column, I’ll post links to the papers presented at the Field Technology Conference as well as videos of papers presented by the CGSIC folks.
See you next month.
Follow me on Twitter at https://twitter.com/GPSGIS_Eric
Trimble debuted its new R2 GNSS receiver at INTERGEO 2015, held this week in Stuttgart, Germany.
The R2 GNSS receiver is a receiver that works with Trimble handheld devices and iOS, Android or Window mobile handhelds, smartphones and tablets using Bluetooth or USB connectivity. When paired with a mobile device, the receiver adds professional-grade GNSS capabilities for better accuracy. The rugged Trimble R2 provides GIS and survey professionals the flexibility to choose the mobile device, workflows and accuracy they need based on applications.
Trimble R2 GNSS Receiver for Mobile Devices
The Trimble R2 GNSS receiver is compact and portable, weighing 2.4 pounds. With one button operation and field swappable battery, the receiver can be pole or vehicle mounted or carried on a backpack. The R2 is a multi-constellation receiver that supports GPS, GLONASS, Galileo, BeiDou and QZSS satellite signals as well as SBAS.
With a variety of standard and optional correction capabilities, the Trimble R2 can achieve sub-meter to centimeter positioning for a broad range of accuracy requirements. The receiver is an option for the Bring Your Own Device (BYOD) strategy.
“Today’s geospatial professionals require flexible solutions which allow for configuration to meet their specific job requirements,” said Ron Bisio, general manager of Trimble’s Surveying and Geospatial Division. “The Trimble R2’s versatility to support GIS and survey workflows as well as BYOD deployment enables geospatial professionals to collect data using the mobile device, workflow and accuracy they choose.”
Workflows – GIS and Survey Field Software
Designed for both GIS field data collection and survey workflows, the Trimble R2 receiver integrates with Trimble TerraFlex mapping and GIS field software and Trimble Access survey field software.
TerraFlex software is a scalable cloud-based solution for geospatial data collection. By pairing the R2 with a smart device or Trimble handheld running TerraFlex, the solution addresses a wide variety of field requirements, including attribute-rich GIS data collection on consumer and professional devices.
Trimble Access software supports the workflows of everyday surveying tasks such as topographic and control surveys and specialized surveying tasks such as roads, monitoring, tunnels and mines. By pairing the receiver with a Trimble handheld running Trimble Access or TerraFlex field software, the Trimble R2 is a versatile solution that supports the full range of geospatial data collection workflows for both GIS and survey applications.
Flexible Accuracy
It us capable of receiving a broad range of corrections from traditional RTK, VRS networks and SBAS to Trimble RTX correction services via cellular/IP connections or satellite (L-band), the Trimble R2 provides high-accuracy data worldwide.
The R2 GNSS receiver can leverage the entire portfolio of subscription-based Trimble RTX correction services to accommodate a wide range of applications and accuracy requirements. This includes CenterPoint RTX (less than 4 centimeters), RangePoint RTX (less than 50 centimeters), and ViewPoint RTX (less than 1 meter) correction services.
Trimble debuted its new R2 GNSS receiver at Intergeo 2015, held this week in Stuttgart, Germany.
The R2 GNSS receiver is a receiver that works with Trimble handheld devices and iOS, Android or Window mobile handhelds, smartphones and tablets using Bluetooth or USB connectivity. When paired with a mobile device, the receiver adds professional-grade GNSS capabilities for better accuracy. The rugged Trimble R2 provides GIS and survey professionals the flexibility to choose the mobile device, workflows and accuracy they need based on applications.
Trimble R2 GNSS Receiver for Mobile Devices
The Trimble R2 GNSS receiver is compact and portable, weighing 2.4 pounds. With one-button operation and a field swappable battery, the receiver can be pole or vehicle mounted or carried on a backpack. The R2 is a multi-constellation receiver that supports GPS, GLONASS, Galileo, BeiDou and QZSS satellite signals, as well as SBAS.
With a variety of standard and optional correction capabilities, the Trimble R2 can achieve sub-meter to centimeter positioning for a broad range of accuracy requirements. The receiver is an option for the Bring Your Own Device (BYOD) strategy.
“Today’s geospatial professionals require flexible solutions which allow for configuration to meet their specific job requirements,” said Ron Bisio, general manager of Trimble’s Surveying and Geospatial Division. “The Trimble R2’s versatility to support GIS and survey workflows as well as BYOD deployment enables geospatial professionals to collect data using the mobile device, workflow and accuracy they choose.”
Workflows – GIS and Survey Field Software
Designed for both GIS field data collection and survey workflows, the Trimble R2 receiver integrates with Trimble TerraFlex mapping and GIS field software and Trimble Access survey field software.
TerraFlex software is a scalable cloud-based solution for geospatial data collection. By pairing the R2 with a smart device or Trimble handheld running TerraFlex, the solution addresses a wide variety of field requirements, including attribute-rich GIS data collection on consumer and professional devices.
Trimble Access software supports the workflows of everyday surveying tasks such as topographic and control surveys and specialized surveying tasks such as roads, monitoring, tunnels and mines. By pairing the receiver with a Trimble handheld running Trimble Access or TerraFlex field software, the Trimble R2 is a versatile solution that supports the full range of geospatial data collection workflows for both GIS and survey applications.
Flexible Accuracy
The receiver is capable of receiving a broad range of corrections from traditional RTK, VRS networks and SBAS to Trimble RTX correction services via cellular/IP connections or satellite (L-band), the Trimble R2 provides high-accuracy data worldwide.
The R2 GNSS receiver can leverage the entire portfolio of subscription-based Trimble RTX correction services to accommodate a wide range of applications and accuracy requirements. This includes CenterPoint RTX (less than 4 centimeters), RangePoint RTX (less than 50 centimeters), and ViewPoint RTX (less than 1 meter) correction services.
How the Internet of Things Now Drives Location Technology
The number of devices connecting to the Internet is growing fast. The applications running on them require location context to determine the most likely use case. These devices need continuous location — not necessarily noticed or activated by the user, but always on. The specification that becomes important is energy per day: the device must maintain its location without draining its battery — and increase location availability indoors. That creates new design requirements for hybrid capability.
By Greg Turetzky
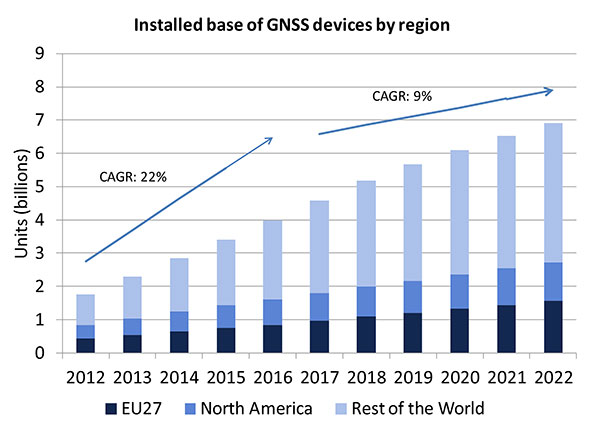
A lot of people have the opinion that the GNSS market is kind of flat. Actually, several different market studies would indicate that it’s not as flat as you would think. See FIGURE 2, taken from the European GNSS Agency’s (GSA’s) 2015 GNSS Market Report. The growth rate certainly is slowing, but any market that continues to grow at a 9 percent annual growth rate is a very nice target area. As you can see, the GSA expects that we’re going to have somewhere in the neighborhood of 7 billion devices within the next eight to ten years.
Figure 2. Installed base of GNSS devices by region; the GNSS market continues to grow at a rapid pace. Source: GSA GNSS Market Report.
We’re getting to the point where the number of GNSS receivers exceeds the population of the planet, which makes for an interesting thought process as to where GNSS is going to end up, and how it’s going to have to end up in everything that we do. That makes for a nice market opportunity. A big reason for that is we’ve seen a lot of growth in demand for multi-constellation GNSS. Everything pretty much has GPS in it that everyone terms as GNSS, but the growth of these other constellations is happening relatively quickly.
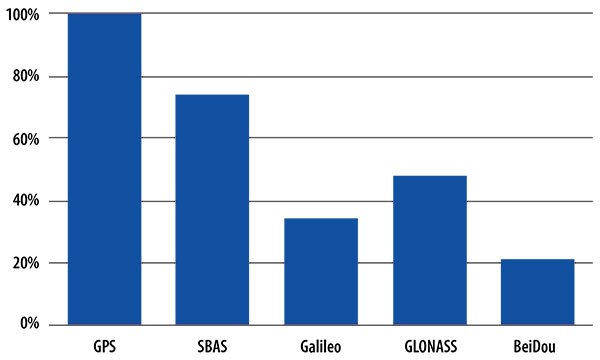
FIGURE 3, in my opinion, is already significantly out of date, even though it is less than a year old. Other market estimates indicate that GLONASS penetration into receivers, especially in the mobile phone field, is closer to 70 or 80 percent today, and that is expected to grow. There’s really no technical or economic reason why GNSS receivers can’t support multiple constellations, even at the consumer mobile device level.
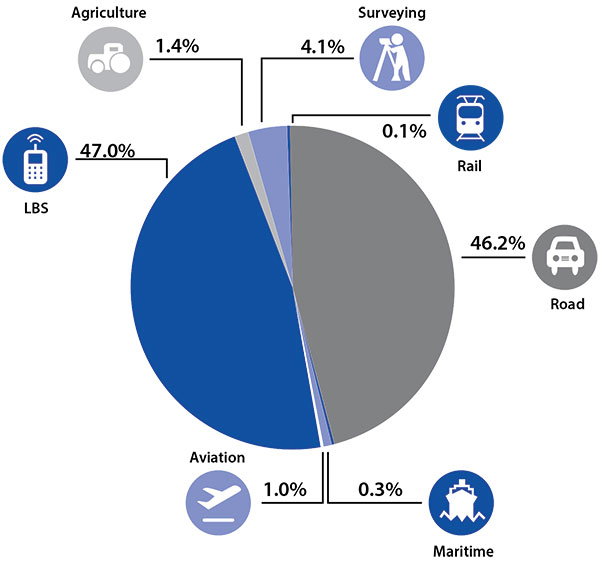
Once all those constellations are in place, let’s look at where those receivers are going from a market standpoint. FIGURE 4 is divided by revenue, which is an interesting way to do it because we all know if you divided it by actual units, then the location-based services (LBS) portions in phones would dominate everything; everything else would just be a sliver that wouldn’t be visible. But if you look at it from a revenue standpoint, there are still many revenue opportunities in the phone segment and in the automotive segment.
Another reason to expect continued market growth is, if you examine Figure 4, you’ll notice that the Internet of Things (IoT) category (see SIDEBAR) doesn’t even show up here. We’ll see going forward that there will be a new slice of pie showing a focus on that segment and those types of applications.
Intel and the Internet of Things
Intel’s mission is no longer only to build PCs. We’re about bringing smart, connected devices to everyone. That encompasses a range of products, and we’ve been expanding our portfolio appropriately.
We start with everything from big iron data centers (which are part of smart devices) to mobile clients and all the way down to the Internet of Things (IoT) and wearable devices. All those devices are part of this smart connected world. Our group’s job is to help on the connectivity side, which varies by product.
This whole idea expands beyond mobile phones and into the IoT, a big trend whose methodology is transforming business, starting at sensors all the way up to big data, to make interesting decisions. The number of devices that are being able to connect to the Internet is growing faster than anybody can keep up with, and that creates a really interesting opportunity. That gives you a bit of a picture as to why Intel is interested in this market and where you’re going to see us playing.
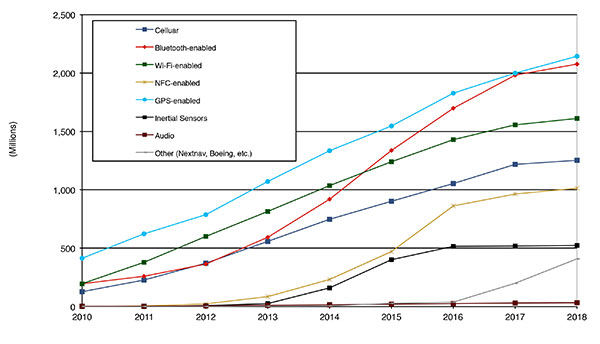
Looking at how we provide this location capability beyond just GNSS, how are people determining their location in these different platforms, and what are the different technologies available? FIGURE 5 shows that in 2014–2015 the most popular technology is still GPS, but there is a fast-growing trend in both Bluetooth-enabled and Wi-Fi-enabled penetration of location technology. Both of these are more suited to indoor operation, where the market is still in its early stages.
Figure 5. Alternative location technology shipments, world market forecast: 2010–2018. Source: ABI Location Technologies Market Data.
Although GNSS continues to grow with market growth, the growth of other technologies and the ability to incorporate them into location solutions is growing pretty quickly, and the radio versions of those are, in general, growing the fastest, followed by the inertial sensors. I think we’re going to see this combination of location technologies, jointly providing a single answer, becoming the norm in mobile products.
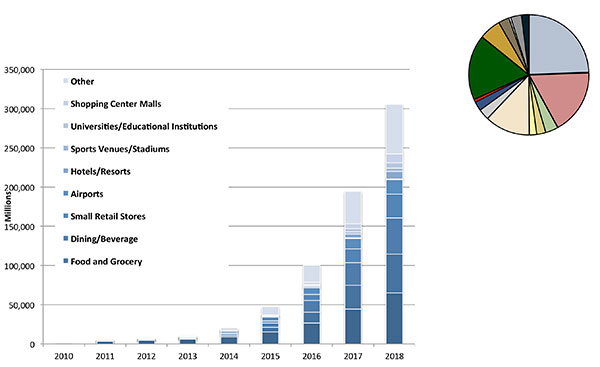
These technologies are going to end up, especially for indoors, in different areas. FIGURE 6 shows a huge growth, not only growth but segmentation among a bunch of different types of venues, all of which seem to be adopting an indoor location methodology. Not all of them will adopt the same one, but all these types of venues are looking at that market and are looking at potential different technologies to serve their needs. What might be most appropriate in a grocery store — geared towards finding a particular item — like a Bluetooth beacon might be less interesting in an airport, where there’s still a need for navigation from place to place, where proximity is not necessarily the right answer.
Figure 6. Indoor location technology installations by vertical market, world market forecast, 2010–2018. Source: ABI.
We see a large growth of a very disparate technology base; at the right of the figure is a pie chart where I had to remove all the callouts, the list of all the different technology suppliers addressing these particular indoor markets. What you see is a highly fragmented supplier base; that’s very consistent with an early market implementation. There’s a lot of different people attempting to get into this market with a lot of different solutions. This is pretty classic for an early-adopter scenario.
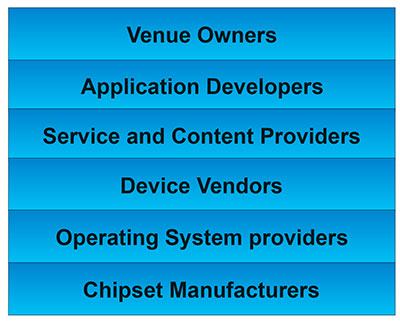
The Stack. Changing accuracy requirements will come up a bit later in this article. Once we’ve looked at where those different venues are from a requirements standpoint, we start to look at the types of companies that are trying to participate in the ecosystem required to do that (FIGURE 7). If you start from the bottom, where I live as a chipset manufacturer, and you move up the chain, you see seven different layers of people in the creation of a location to the end user, especially indoors. And every single person you see in this value chain is trying to make money.
Figure 7. LBS value chain: a highly complex ecosystem with each segment looking to differentiate and monetize indoor location. Source: GSA GNSS Market Report.
That’s the crux of the issue: a lot of people want a piece of that pie, and all of them have a relevant part to play, but when seven people in the stack are all trying to own the location result in order to monetize it, it becomes difficult to create a unified methodology. I live at the bottom of this complex ecosystem, in the technology implementation layer. Getting dollars to flow from the top to the bottom gets relatively difficult, so we are very driven to bring cost competitiveness into this market.
In summary, from a market standpoint, we see that the market opportunity is very big and still growing. This makes it interesting to a company like Intel, even though we aren’t a major player in the business today, to continue to invest in it. We see a trend going from GPS to GNSS and on to location, and now the big opportunity is indoor location. But this indoor-location market is not a stand-alone device opportunity. Indoor location requires this kind of technology inside other devices, inside phones and tablets and IoT types of things.
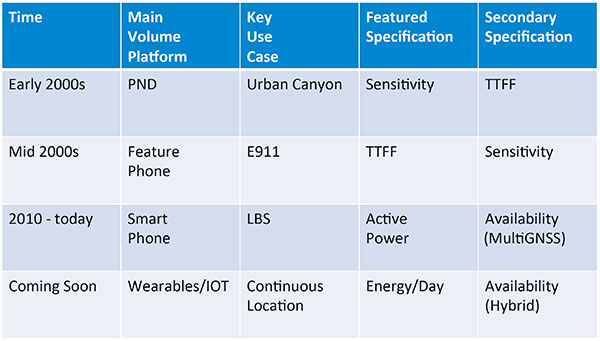
Context. Let’s look at indoor location as a feature in a larger portion of product. That idea comes from the requirement for location not just for the location itself, but in order to provide context. That’s critical because now these smart, mobile devices are not just used to make phone calls, but are used all the time. As a result, many applications running on them really require that location context to determine the most likely use case that the device is currently operating, making the consumer experience easier and more natural. This is evident throughout the entire value chain from phones and tablets to wearables. If you think about that from a requirement standpoint, you see the major places where GNSS has enabled trend changes in the market.
Let’s step back a bit in history to go through FIGURE 1, the opening figure, horizontally. In the early 2000s when I was at SiRF Technology, the main market drivers were personal navigation devices (PNDs). There were all these dashboard-mounted PNDs, and the main things we were trying to fix was the urban-canyon problem. GPS always worked well in the rural areas but always had trouble in urban canyons; to fix that, we had to improve the sensitivity. The solution in that timeframe was with multi-correlator designs and improved RF frontends; we were able to improve the sensitivity of the receivers by a good 5–10 dB, which enabled us to really keep the antennas inside the car so that there was no need for roof-mounted antennas. The PND could be mounted on the dash and work just fine. That was a big factor in improving the user experience. The secondary specification that enabled that market to grow quickly was time-to-first-fix; those devices had to power-up and work fast to prevent user frustration.
Within about five years, however, the PND market was overtaken by growth in the feature phone market. The reason for that was the FCC E911 mandate; everyone had to figure out a way to make sure that phones sold in the United States had the ability to meet that 911 mandate. GPS was one of the major methodologies in meeting that, and the main driver there was not around sensitivity, it was improving first-fix times. The mandate required a 30-second TTFF implementation in a very challenged environment to support emergency-services dispatch. This led us to the development of assisted GPS (AGPS) and further integration into phones. We had a secondary requirement of continuing to improve the sensitivity, because now we had to deal with an even worse antenna in a handset.
Once that was taken care of in the mid 2000s, the next thing we saw coming — and what’s coming now — is the change in GPS requirements for smartphone navigation. This comes from the huge growth of higher end smartphones that are running multiple applications driving the use-cases around LBS. How will the location be used to provide services, now that we can provide applications on that platform? Now the most important specification has become active power? Every time a GPS receiver is turned on for use in an LBS mode, you have to make sure that the power consumption is kept to a minimum, or no one will use those services. So the active power of the device became a very important specification that we were all trying to improve.
The secondary specification we had to improve was the availability. This is where the advantage of multi-GNSS started to show up — using handsets for car navigation on Google map types of implementations. So the performance of smartphone navigation in the urban canyon became a big driver recently as the main use case.
Impacts of New Requirements on Silicon Design
Standby power reduction impacts
SRAM is the leakiest component of typical design
Needs to be reduced or ideally eliminated
Non-continuous fix methods
Ability to quickly save and restore state information
Hybrid location solutions
Support measurements from multiple radios
Need to share radios, not duplicate chains
Increased integration of of multiple radios on single die
Need more interference rejection capability
Ability to support concurrent radio operation on single die
Next! What’s coming next is the idea that these wearables and IoT platforms are not just doing LBS on demand because of the currently active application. They are going to need continuous location. The device needs to provide location capability all the time, but it’s not necessarily going to be noticed by the user or activated by the user, so the specification that becomes important is energy per day. You want to make sure your device can maintain its location without draining its battery. Then we are also going to have to increase the availability of location into indoors to really fix this whole problem. And that will really move us into hybrid capability.
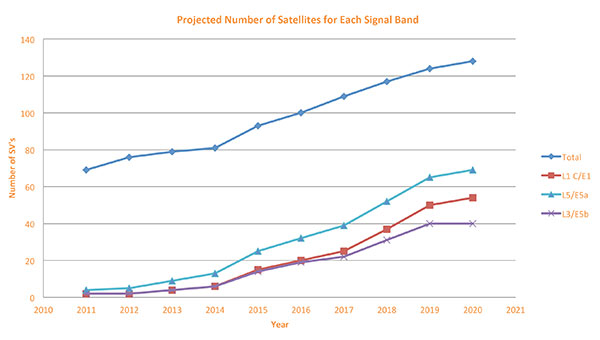
If we look at those changes in the market and we look at how they’re going to impact the GNSS architecture, the first thing we want to look at is: Where is GNSS? FIGURE 8 is a plot that I’m sure everybody has and is hard to keep up to date. It looks at the satellites coming from the different satellite constellations. The important thing here is that we are approaching a timeframe where a significant uptick in the growth of satellites can send the numbers over 100. That can really have an impact on receiver design, if you’re building a multi-GNSS receiver and you have to deal with a hundred satellites. How are you going to do that?
Figure 8. Projected number of satellites for each signal band.
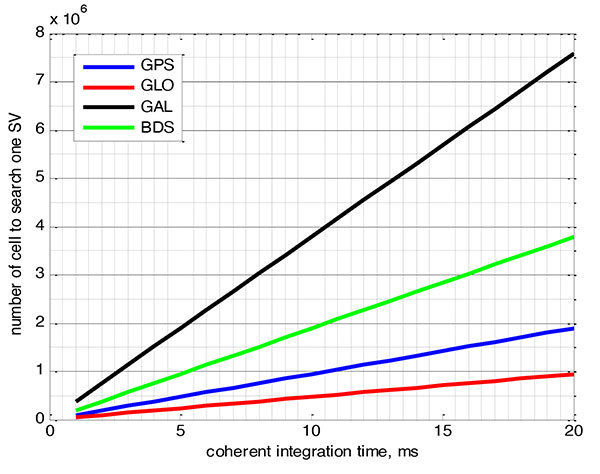
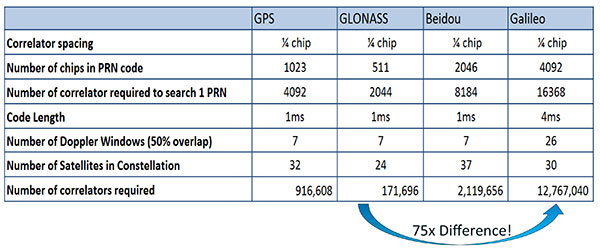
FIGURE 9 shows the relationship between the coherent period and the number of correlators required to search for one satellite in each constellation. We looked at particular scenarios — in this case, let’s say we are trying to do an outdoor location, so –130 dBm cold start test (FIGURE 10) with an initial frequency certainty of around 1 part per million (ppm). We wanted to look at the impact of the different constellations on doing that, and what it takes inside of the receiver to implement it. I’m not going to go into great detail here. But looking at those impacts in correlator counts, you can see the difference between building a GPS receiver that can do this and building a Galileo receiver that can do this. From the simplest one, that is, GLONASS, and from the most difficult one, which is Galileo, you see a 75x difference in the number of correlators required to do that, based on signal structure. This would indicate that, maybe from a cold start fix point of view, you might prefer a GLONASS implementation, and do GPS or Galileo later.
Figure 9. Relationship between the coherent period and number of correlators requried to search for one satellite in each constellation. ±1 ppm local oscillator frequency uncertainty; ±10 kHz Doppler shift range; 50 percent Doppler bin overlap; 1/4-chip correlator spacing.Figure 10. Test scenarios, cold start test.
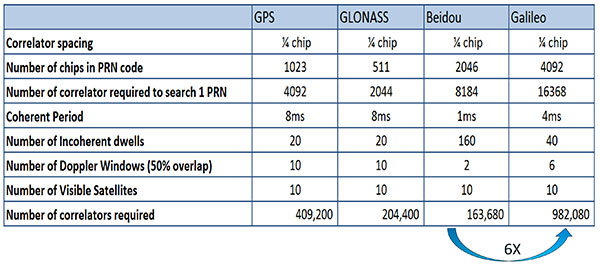
If that specification was your primary concern, then you would look at how those requirements got implemented into those devices. In addition, you try to come down to these low levels of power consumption, maintain sufficient accuracy to support these applications, and be able to move this into a very small form factor. If we look at the relationship between the number of correlators required to search for each satellite and amount of silicon area that requires, we see a big difference in the growth of those, depending on which constellation you look at. But if you look at a hot start scenario (FIGURE 11) rather than a cold start and at a weaker signal level, which is the more common implementation in devices today, you see a different result. With an improved starting condition because we have better information on the oscillators and reduced other uncertainties producing a smaller search space, the silicon area impact is greatly reduced. Then we have to really look at reducing standby power. That means we need to look at static random-access memory (SRAM) because SRAMs are a horribly leaky component and create very large standby power, but they are what we’ve been using for years in the standalone GPS world.
Figure 11. Test scenarios, hot start test.
We also have to look at non-continuous fix methodologies: this idea of turning things on and off to save power, which relates back to the standby power issues. We also have to look at hybrids: How are we going to support measurements from multiple radios like Wi-Fi and Bluetooth that are becoming important for indoor location? How are we going to share those radios without just pasting them together? That involves integration onto single die, and looking at what happens on the silicon level, and at what happens when you try to run radios at the same time.
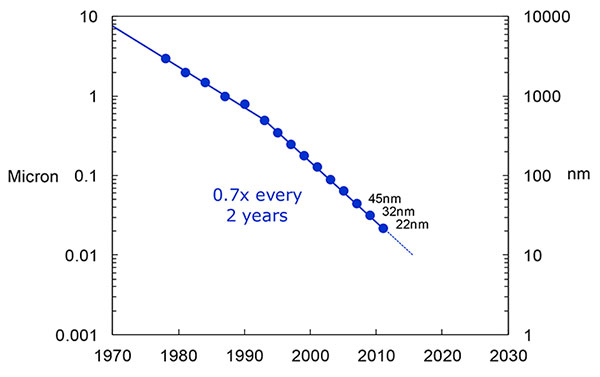
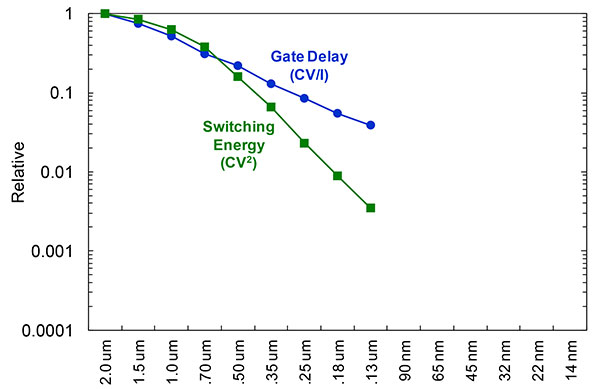
What we have to work with, especially here at Intel, the home of Gordon Moore, is Moore’s Law. It is still working 30 years after it was proposed. Recently, we see that we are tracking this progression of constantly reducing device sizes and moving forward. The dates in FIGURE 12 are for the process technology nodes associated with a classical digital process. We are not at the 22-nanometer level today on GPS receivers, but we are moving down that curve.
Figure 12. Moore’s Law in action: transistor scaling and improved performance. In GNSS terms, this means more gates and more memory for less cost, improved TTTF and sensitivity by allowing more search capability.Figure 13. Scaling also increases speed and reduces power. HIgher clock speed provides better search and more complex navigation algorithms.
Obviously, when you move down that curve, you greatly increase your ability to add more gates to improve TTFF and sensitivity. More correlators help you search out more uncertainty faster. The other thing this does is allow us to run faster, to up the central processor unit (CPU) clockspeed. This allows more software capability to do things like process more advanced navigation algorithms, bring in more satellites from multiple GNSS, run very expansive Kalman filters, and look at hybrid technologies. It has also driven down the power, so that reducing the active power requirement that we had was kind of coming along with Moore’s law without a whole lot of effort.
But now we’ve run into a problem: the parameter that we care more about, standby power, is actually going up. Although we are getting benefits out of Moore’s Law from speed and active power, we are actually having a problem. It’s increasing our standby power, which makes it difficult to go to these lower fix rates with faster restarts.
You see a trend here. As you move down in technology nodes, you find that the more advanced technology nodes are less applicable to the smaller multi-purpose devices. This is part of the reason why you don’t see the mobile phone devices coming down as fast as you see the desktop devices coming towards those new technology nodes.
This means some really significant silicon design challenges. We need to figure out how to take the advantages of Moore’s Law and maintain the benefits of smaller geometry, we need higher clock-speeds, and we need more memory for multi-constellation methodology and that gets lower active power and smaller size.
But we have to figure out a way to not give up our standby power when we start moving down into these very small geometries. That will require some new methodologies, both at the chip level in terms of how we build silicon, and at the system design level, in terms of how we put these things together inside a mobile phone.
What Intel Is Doing
I can’t tell you what we haven’t done yet, but we look at location as an opportunity where the strength of Intel comes into play. We have very advanced silicon processors and we are bringing those to bear on the location technology problem — just starting in the last few years. Our goal is to provide a GNSS and location silicon solution with best-in-class performance based on Intel technology. Once we’ve done that at the silicon level, we’ll look at bringing the platform-level integration capability together.
We have the ability to merge multiple location technologies. We have a platform-level capability to integrate hardware and software to solve the indoor location problem on a variety of platforms. To execute to Intel’s vision, we’re going to push this into a ubiquitous technology present in all these devices, so that we can improve the variants on these mobile products.
Multiple Radios. That’s part of what’s driving the whole industry towards the kind of consolidation that we’ve seen: stand-alone chipsets are not the only (or even the preferred) way to solve this problem. Without some access to the system design level, we’re not able to solve this problem for mobile phones and IoT type devices. We’re going to see this trend — that we all see coming — of putting multiple radios onto a single die, because that does reduce cost and size as we try to get into watches.
The 2015 Consumer Electronics Show brought out the new stuff. They’re talking about IoT buttons. We still have a ways to go; bringing that capability down to that size in a GNSS radio is a difficult problem. Once we start incorporating these different radios, such as Wi-Fi and Bluetooth, into this solution, we run back into the problem of the value chain: How to get everyone aligned in a device with these capabilities into a single unified solution?
One of the problems a lot of us see with these mobile products is that they have a lot of application and they require a lot of interaction. We’d all like these devices to become smarter and present the information that we want, when we want it. A big part of that is the location context, and so that’s what we’re planning on doing: integrating that location context into all these platforms so that these smart connected devices can be even smarter and provide a better user experience.
GREG TURETZKY is a principal engineer at Intel responsible for strategic business development in Intel’s Wireless Communication Group focusing on location. He has more than 25 years of experience in the GNSS industry at JHU-APL, Stanford Telecom, Trimble, SiRF and CSR. He is a member of GPS World’s Editorial Advisory Board.
The statements, views, and opinions presented in this article are those of the author and are not endorsed by, nor do they necessarily reflect, the opinions of the author’s present and/or former employers or any other organization with whom the author may be associated.
This article is based on a GPS World webinar, which sprang from a presentation at the Stanford PNT Symposium. Listener questions and Greg Turetzky’s answers during the webinar, which can be read here.
The author would like to acknowledge the contribution of Figures 9, 10 and 11 from the paper “Optimal search strategy in a multi-constellatoin environment” by Intel colleagues Anyaegbu et al, from ION GNSS+ 2015.
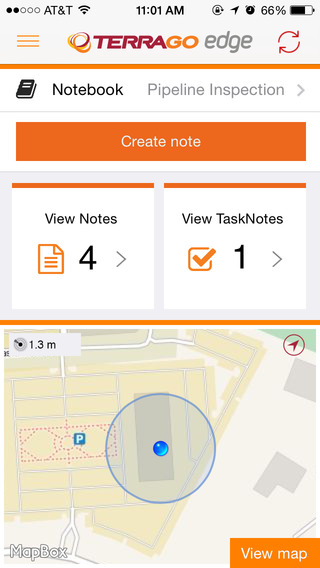
TerraGo Edge version 3.7, now available, includes new intelligent, responsive forms, as well as GPS and GIS enhancements designed to dramatically improve the speed, quality and efficiency of asset inspections, land surveys and any location-based data-collection project.
TerraGo Edge smart forms can accelerate the data-collection process by automating and accelerating user entries while eliminating unnecessary or redundant steps. Smart forms can be customized to meet the workflow requirements of customers in any industry.
New features in version 3.7 include:
Advanced Form Creation with New Smart Forms
Form groups – new form element to organize multiple related fields
Conditional fields – additional fields appear based on user entry of other fields
Barcode and QR code support – instantly scans codes to eliminate manual entry
Calculated fields – calculated result field based on other form field values
Multiple form attachments – ability to attach two or more forms to a single Note
Researchers at Qihoo 360, a Chinese Internet security firm, say they have found a way to make a GPS emulator that can falsify the location of smartphones and in-car navigation systems, reports Forbes. The system is inexpensive compared to expensive, sophisticated GPS emulators that can cost thousands of dollars.
Qihoo lead researcher Lin Huang is the first Chinese woman to present at the yearly hacker conference Defcon, held in Las Vegas on Aug. 6-9. Huang said her team used common software-defined radio (SDR) tools to create their module and software. They also used open-source software found on Github that had come from researchers at a Chinese university, along with their own code.
The SDR tools used include HackRF, described by Forbes as the $300 wireless Swiss army knife for hackers. The small board can move between radio frequencies, and read and transmit to a broad range of radio frequencies. On smartphones, the attack targets navigation signals delivered at the chipset level, on both Apple or Android smartphones.
Huang suggests that chipset manufacturers consider introducing new software that can better detect GPS spoofing.
One potential target of such spoofing is a drone., which could be commandeered by the spoofer and taken into restricted airspace. Alternatively, it’s possible to make drones believe they’re in a no-fly area.
The Qihoo team demonstrated such attacks using the free and open source GNU Radio, among other tools, to alter the GPS coordinates on a DJI Phantom 3. In a video at Forbes, filmed from a drone-mounted camera, the hackers force a UAV to crash land.
The researchers said the weaknesses could be fixed by DJI and other drone makers, but they would have to do so at the GPS chip level, meaning any drones already out there are unlikely to receive an update.
At Caltrans District 7 in Los Angeles, we use the onboard GPS capability of smartphones to navigate in real time to the locations of proposed aerial targets and NGS control stations.
KML files are created in the office using desktop GIS, then downloaded to smartphones for use in the field. We create KML files specifically for use by our surveyors during every aerial mapping project within Los Angeles and Ventura Counties.
The aerial target layer also shows the proposed locations of stereo model limits on the smartphone.
Having the stereo model limits as a data layer becomes a handy piece of information in the event an aerial target needs to be relocated due to unfavorable field conditions. The heads-up capabilities of GPS aboard the smartphones and KML files can also show the easiest path to reach either target location or control stations. The NGS control station layer hyperlinks to the NGS website so the field surveyor always has the recovery note available in an electronic format.
The field surveyors are also given hardcopy maps of the target locations and control stations, but those are now only used as a back-up to the KML files loaded onto the smartphones.
We have found that leveraging the onboard GPS capability of smartphones with GIS-based data layers in the field has increased production. Using smartphones provides the surveyors with information more concisely and clearly, so better decisions can be made while in the field. The project surveyor has the ability to tailor datasets specifically to project needed by the field surveyors.
Once the aerial targets have been placed and the NGS control stations recovered, the field surveyors then position the aerial targets and control stations using carrier phase GNSS.
From our July issue comes this showcase featuring products for surveyors, geographic information systems (GIS) professionals, field workers, and anyone who is looking to expand the capabilities of their smartphone or tablet.
Dedicated Survey/Geospatial
Three-Accuracy Series
The LT500 series of handheld GPS receivers, LT500H/T/N, covers three accuracy ranges from sub-meter to centimeter. It is a cost-effective full GNSS positioning solution for survey, construction and GIS professionals.
Powered by the Windows Embedded Handheld 6.5 operating system, the LT500 is accurate, rugged and versatile. User productivity is enhanced with the built-in gyroscope, an innovative laser plummet for positioning the accurate handheld receiver over a point, an E-compass for showing the direction and G-sensors for leveling. The LT500 series comes bundled with software including SurvCE, DigiTerra and MapCloud. The LT500H has120 channels (GPS L1/L2/L2C, GLONASS G1, G2, BeiDou B1 and Galileo E1), the LT500T has 220 channels (L1, G1, B1), and the LT500N has 12 channels (L1).
The all-in-one TRIUMPH-LS by JAVAD GNSS combines a high-performance 864-channel GNSS receiver, all-frequency GNSS antenna, and a modern featured handheld. The 864 all-in-view channels include Galileo E1/E5A/E5B, GPS L1/L2/L5, GLONASS L1/L2/L3, QZSS L1/L2/L5, BeiDou B1/B2 and SBAS L1/L5.
More than 100 channels are dedicated to continuous interference monitoring, allowing safe GNSS operation in a city, airport and military environment.
The GEOmeter MX system is designed to gather GIS information in heavily wooded areas, with object description, area coordinates and measurement time grasped automatically. The system consists of the GEOsat MXbox receiver, a combination antenna, a PDA such as the Trimble Recon or the Handheld Nautiz X8, and GEOfield software for mobile GIS.
The Mxbox receiver is a Hemisphere multi-constellation GNSS OEM board with GPS, GLONASS, BeiDou, Galileo and QZSS, plus code- and carrier-phase tracking for increased positioning accuracy and availability. The GEOfield software offers reliabe recording, representation and processing of geodata. Measurement quality is indicated in the field with statistics and graphics, in either German or English.
The Matchstiq S10 is a software-defined radio (SDR) platform. It provides increased RF flexibility, RF performance and signal processing capacity in a small package. The Matchstiq S10 platform combines the Epiq Solutions’ Sidekiq SDR with a quad-core processor system running Linux. The Sidekiq MiniPCIe SDR card provides an independently tunable RF transmitter and receiver covering 70 Mhz to 6 Ghz with an RF bandwidth up to 50 Mhz, plus FPGA. The Matchstiq S10 platform also integrates GPS, Gigabit ethernet (with PoE), USB 2.0 OTG, HDMI and real-time clock in a very small form factor package.
Leica Captivate software provides a 3D view for the Leica Viva GNSS, merging the overlay of measured points, 3D models and point clouds into a single view.
Using Leica Captivate, users can capture and manage complex data with the touchscreen on both the Leica CS20 handheld controller and the CS35 tablet.
The CS20 runs on Windows EC7 and is IP68 and MIL-STD-810F rated. It has a 5-inch WVGA color touchscreen that allows for comfortable and quick data processing and a fully integrated radio and antenna for long range robotic total station control. The CS35’s 10.1-inch screen is visible in all conditions. It runs on Windows 8.1 Pro, enabling workers to take their office into the field. It is IP65 and MIL-STD-810G rated.
The FOIF F55 series GIS handheld comes in two models: F55-A and F55-B. The onboard software FOIF SuperGiS allows users to conduct field mapping with powerful functions for data collecting, data editing and data querying.
The F55 measures 234 x 99 x 56 mm and weighs 895 grams. It has an IP65 rating for water and dust protection. The F55-A supports four GNSS (GPS, GLONASS, Galileo and Beidou) as well as SBAS, and can search for up to 120 channels. The F55-B supports GPS and SBAS and provides 12 channels.
With Differential GPS, the F55-A has an accuracy of 0.4 meters, and the F55-B has an accuracy of 0.5 meters. RTK surveying on the F55-A obtains high precision of 1 cm + 1 ppm. Real-time correction service and post-processing are available.
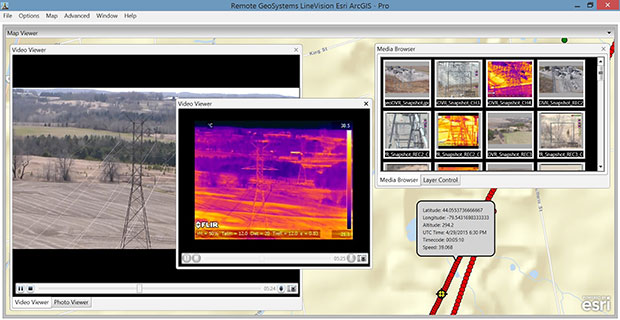
The geoDVR Gen2 is an advanced multi-channel high-definition/standard-definition geospatial digital video recorder designed for aerial and mobile environments.
Unlike a DVR, the rugged geoDVR permanently embeds videos with important GPS location, time and other data — the GPS metadata remains intact even when a video is edited. Most video cameras and gyro-stabilized gimbals can be connected to the geoDVR for recording of HD or geospatial video files.
Video files created by the geoDVR can be analyzed in the RemoteGeo LineVision suite of mapping applications, including tools for Google Earth, Esri ArcGIS, PLS-CADD and the LineVision Cloud. The administrative dashboard allows for monitoring up to four video streams in real-time.
The G1-m1 receiver is part of the G1 family of products from Geomatics USA. The G1 system is scalable from a single-frequency semi-mobile receiver — for control networks and some semi-kinematic mapping applications — to a dual-frequency network RTK solution. It was designed to be lightweight, accurate and portable, especially suited to building a system for travel; for example, all the G1-m1 components, including tripod, will easily pack into a baseball-style bag for transport. The G1-m1 offers centimeter and sub-foot accuracy (centimeter-level accuracy is possible for OPUS-compliant static sessions).
The Panasonic Toughpad FZ-M1 is a thin, light and rugged 7-inch Windows tablet with dedicated GPS — the u-blox Neo M8 series — as an option. The FZ-M1 is built to enable mission-critical mobile worker productivity. Powered by Windows 8.1 Pro and a choice of two Intel processors, it features a long life, user-replaceable battery and a daylight-readable, high-sensitivity multi touchscreen for use with heavy gloves. With a broad range of configuration options, the customizable Toughpad FZ-M1 is rated MIL-STD-810G and IP65, resistant to five-foot drops, weather, dust and water.
Trimble’s RTX technology-based correction services — Trimble CenterPoint RTX, Trimble RangePoint RTX and the new Trimble ViewPoint RTX — are now available on Trimble Geo 7X handhelds.
Trimble RTX technology provides compatible GNSS receivers with correction services that significantly improve accuracy and reliability in obtaining positions worldwide. Operational efficiency and productivity in the field is improved by delivering real-time DGNSS corrections directly to the Trimble Geo 7X handheld.
The handheld solution is designed for industries such as utility companies, municipalities and environmental management agencies, in which workers are highly mobile and require a reliable, flexible data-collection and asset management solution.
A choice of RTX correction services ranging from 4 centimeters to submeter-level horizontal accuracies is available.
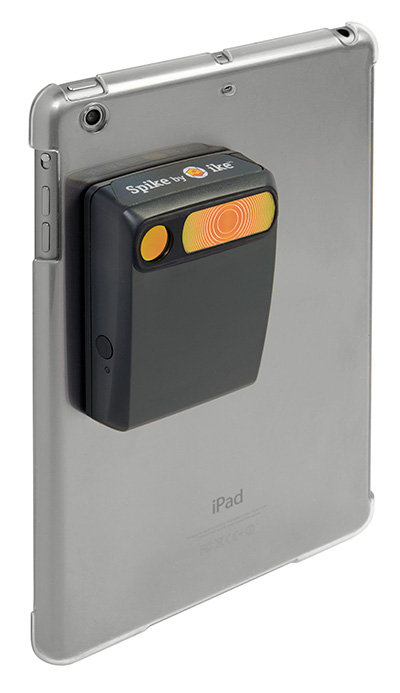
The Spike device and Spike mobile app allow users to measure an object by capturing a photo from a smartphone or tablet. From the photo, users can capture real-time measurements, including height, width, area, length and target location. Location data includes latitude, longitude and altitude. Spike is useful for construction, inspection, safety, advertising, real estate, insurance and government applications.
Measurements and location data are saved with the picture and can be shared via email as a PDF, XML and KMZ. KMZ files can be imported into GIS tools such as ArcGIS and Google Earth. The photo can be referenced via the Spike app to take new measurements or view original measurements.
The Spike device pairs with an Android or Apple iOS smartphone or tablet via Bluetooth. Its laser rangefinder works with a smartphone’s camera, GPS, compass and Internet connection.
The iSXBlue II+ GNSS is a palm-sized receiver that delivers real-time, high-accuracy performance using GPS+GLONASS satellites and free SBAS corrections for an iPad or iPhone. Its battery-powered lightweight design is for a variety of mapping applications including GIS, forestry, mining, utilities, agriculture, surveying and environmental. It delivers high accuracy in real time without the need for post-processing or another correction source when SBAS (WAAS, EGNOS, MSAS or GAGAN) are available. Using both GPS and GLONASS satellites, the iSXBlue II+ GNSS will work where GPS receivers struggle, such as in the forest, around buildings and in other difficult mapping environments. The L1/G1, GPS+GLONASS receiver has 372 channels.
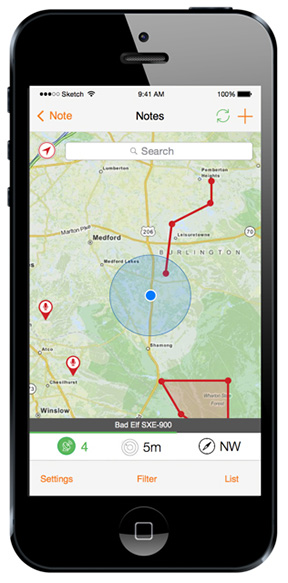
TerraGo Edge allows organizations to collect data and share field information on their smartphones and tablets. TerraGo Edge replaces traditional GPS handheld devices with a mobile cloud-based solution. Users can collect GPS data points at any accuracy level, either by using the onboard GPS on a smartphone or by attaching a centimeter-level GPS receiver to a mobile device.
TerraGo Edge 3.6 features enhanced support for high-accuracy GPS receivers such as EOS and SXBlue on both iOS and Android, as well as better mapping features, basemap sources and integration with Google Earth.
For managers, TerraGo Edge provides a real-time dashboard for monitoring field users and data collection.
MachineryGuide enables a tablet or smartphone to be used as a precision tractor GPS system. The MachineryGuide Android guidance program functions as a precision farming application using an antenna capable of receiving and processing EGNOS and WAAS corrections. It can be used for any farming activity that is done by tractor or other agricultural machinery, including fertilization, manure application and spraying. It even can be used for land measurements.
MachineryGuide sells the software separately; a GNSS receiver + antenna separately; and a package bundle that includes software, GNSS receiver and antenna. The receiver uses GPS, GLONASS, SBAS and QZSS signals for a position accuracy of 2.5 meters CEP.
The TomTom Bandit Action Camera allows creation of videos within moments of the action. It comes with a built-in media server, eliminating the need to download footage before editing. The camera works with a companion app, making it possible to create and share videos in a matter of minutes — by shaking a smartphone.
The TomTom Bandit Action Camera is equipped with in-camera motion and GPS sensors to automatically find and tag footage based on speed, altitude, G-force, acceleration and heart rate. Highlights can also be tagged manually with a tagging button on the camera or the remote control.
The Forerunner 225 integrates optical heart-rate technology by Mio and features a colorful graphic interface showing runners their zone and beats per minute at a glance. A built-in accelerometer provides distance and pace data for indoor running with no need for a separate foot pod. To keep runners active between workouts, it doubles as an activity tracker, counting steps, calories and distance.
When paired with a compatible smartphone, the Forerunner 225 will automatically upload a completed run to the Garmin Connect Mobile app for post-run analysis and sharing on social media sites. Runners can also use live tracking to allow friends and family to follow along during training or on race day to see stats in real time.
TerraGo Edge 3.6 is now available. TerraGo Edge 3.6 features enhanced support for high-accuracy GPS receivers on both iOS and Android, as well as a host of new mapping features, basemap sources and integration with Google Earth.
“TerraGo Edge’s enhanced support for EOS and SXBlue receivers helps users take advantage of real-time, high-precision GPS receivers while getting all the productivity benefits that come with the smartphone and tablet user experience,” said Brian Mickel, technical consultant, LHNav. “This is the future of GPS data collection where mobile users can integrate independent GPS receivers to get whatever level of accuracy the job requires.”
New features in version 3.6 include:
Sub-meter and cm precision with SXBlue and EOS GPS receivers for iOS and Android
Polygon and polyline note support added on iPhone and Android
Auto-drawing polygons and polylines from GPS points
Multi-note view on iPhone and Android
KML import and export added to growing list of data interfaces, improves Google Earth integration
New mapping features and editing of polygon notes
New “over-zoom” feature allows extreme map zooming on all devices and basemaps
Brand new basemap source options
TerraGo Edge is an open GPS data collection solution, helping customers replace outdated handhelds and proprietary databases with an open, modern, mobile solution that meets the needs of all stakeholders. For the field users, TerraGo Edge delivers any level of precision with unparalleled support for a full range of Bluetooth GPS receivers on Android and iOS.
For the manager, TerraGo Edge provides a real-time dashboard for monitoring field users and data collection. For GIS users, TerraGo Edge provides accuracy settings that ensure GPS data quality, with tools for QA and open export to any GIS or CAD system.
A free trial of the TerraGo Edge app for iOS or Android is available.
The MachineryGuide package with antenna, receiver and guidance software.
MachineryGuide is a new GPS guidance system for Android that gives farmers the ability to use their smartphones for precision guidance.
With the help of MachineryGuide, the cultivated area and overlaps can be displayed. The guidance application helps farmers in edging along the ideal track by gearing to straight reference lines.
With the application and an antenna from MachineryGuide, farmers can have a simple precision guidance application to improve yield growth, increasing efficiency. Also, fertilizer and pesticide use can be optimized, while machine costs and work hours can be lowered by up to 10 percent, the app designers said.
The application is aimed at managers of small- and medium-sized farms and can be used on a smartphone or tablet. A demo can be downloaded from GooglePlay — the free version can not connect to a real GPS device, but all the functions of the program can be tested.
MachineryGuide sells the software separately; a GNSS receiver + antenna separately; and a package bundle that includes software, GNSS receiver and antenna. The antenna is capable of receiving and processing free corrections (EGNOS, WAAS).
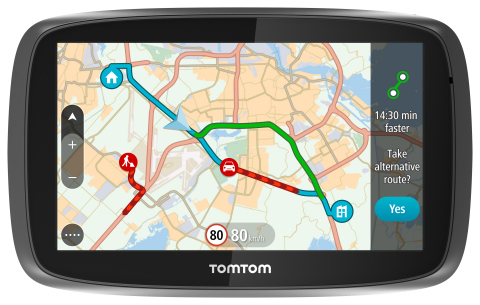
TomTom is introducing Lifetime World Maps and Lifetime Speed Cameras to drivers with the launch of four new TomTom navigation devices.
TomTom is introducing Lifetime World Maps and Lifetime Speed Cameras to drivers with the launch of new TomTom navigation devices. Lifetime World Maps allow people to drive with maps from around the world at no extra cost, for the lifetime of their TomTom GO device2. Lifetime Speed Cameras let drivers know the locations of all speed cameras — both fixed and mobile, also for the lifetime of the device.
The TomTom GO 510, 610, 5100 and 6100 feature a fully interactive screen to pinch, zoom and swipe — as well as a rich user interface, simplified user interaction, 3D Maps and a Click & Go mount. Drivers can also choose between a 5-inch or a 6-inch screen size, TomTom said. The new TomTom GO devices also include “Drive Home” and “Drive to Work” buttons in the main menu, for faster, simpler navigation.
TomTom GO devices combine real-time traffic information with routing technology, to always offer drivers the fastest route available. TomTom Traffic covers all mapped roads and combines data from millions of data sources, from all over the world, to deliver traffic information so accurate that, with each new update, it can pinpoint the start and end of a traffic jam, precisely, down to 10 meters.
“With the addition of Lifetime World Maps and Lifetime Speed Cameras to our new TomTom GO devices, we’re offering the most comprehensive package to drivers that we’ve ever launched,” said Corinne Vigreux, co-founder and managing director, TomTom Consumer. “Our aim is to help you avoid the jams, getting to your destination faster, wherever in the world you might be.”
Lifetime TomTom Traffic is available via a smartphone connection on the TomTom GO 510 and 610. The TomTom GO 5100 and 6100 offer Lifetime TomTom Traffic via a built-in SIM with unlimited data and roaming at no extra cost.
The new TomTom navigation devices are compatible with TomTom MyDrive4. For the first time, drivers can use their smartphone, tablet or PC to review real-time traffic information, plan routes, and send destinations to their TomTom GO, before they get in the car. Previously launched TomTom GO devices5 are also compatible with MyDrive though a simple software update. Find out more about TomTom MyDrive here.
The new TomTom GO devices are now available online and in-store from €199.95.
Great view of the Pentagon while departing from the U.S. Hydro conference held in Washington, D.C.
I’ve attended five conferences in the past couple of months; Esri Water Conference (first one!), Esri Partner Conference, US Hydro 2015, APSG (Association of Petroleum Surveying & Geomatics) and the Esri Petroleum User Group (PUG) conference. It may look Esri-heavy, but the fact is that Esri is doing a really good job of organizing vertical market GIS conferences, and people are showing up. Even with crude oil prices in the cellar (relatively speaking), 1,200 people still showed up at the PUG.
There were a lot of good presentations at these conferences, and I’ll post links to some of them below. Not surprisingly, drones are a major topic of discussion at most GIS conferences. There was even a drone demo (I missed) at the Esri Partner conference showing Esri’s workflow in working with drone-collected data.
If you don’t follow me on Twitter, you might consider it. Twitter is easy and free. When I’m at a conference, I send tweets (most with a photo) in near real-time when I see something of interest. For example, I tweeted when Jack Dangermond showed up at the Esri PUG (he usually doesn’t, but did this year because it was the 25th annual conference) and had something interesting to say (read below). You can sign up for Twitter here, and then choose to follow me at https://twitter.com/GPSGIS_Eric. I get that you may be hesitant to invest any time in this, but it looks like Twitter is becoming the standard for near real-time news (as opposed to other social media such as Facebook or LinkedIn.)
Of all the new technology I’ve heard about over the past few months at these conferences, two subjects continue to excite me.
Drone Mapping. Of course, one of them is drone technology for mapping. It seems like I’ve beat this horse to death over the past few months, but it continues to get juicier and juicier. Technology development in this industry is moving really fast. It seems like new drones are being announced as frequently as new smartphones, maybe more so.
Other ancillary technologies are being developed to support commercial drone operations. For example, in my hometown (Portland, Ore.), a company called Skyward just raised $4+ million in venture capital funding to provide “professional services for UAV operations.” Essentially, the company’s software helps drone operators stay within FAA regulatory compliance.
Last year, the Oregon Unmanned Systems Business Enterprise was formed “with a two-year $882,000 state grant from the Oregon Business Development Department and the Oregon Innovation Council and will be working to match the government money with private investment and other grants.” The organization will award grants up to $75,000. The point is, the money is flowing and it’s a wide-open market.
The drone market is so wide open, in fact, that most drone companies are just buying common airframes and associated parts, putting their brand name on them, and selling them. Perhaps oversimplified, but the point is there’s not much “special sauce” (technology) being added. The manufacturers that aren’t innovating and adding valuable “special sauce” will eventually disappear. Essentially, following are the parts needed for a fixed-wing drone for mapping:
Aircraft components:
Airframe (off the shelf)
Motor (off the shelf)
Servos (off the shelf)
Propeller (off the shelf)
Radio (off the shelf)
GPS (off the shelf)
Autopilot (off the shelf)
Batteries (off the shelf)
Camera trigger (off the shelf)
Camera (off the shelf)
Ground compoments:
900-MHz controller (off the shelf)
Battery chargers (off the shelf)
Mission planning software (off the shelf)
Propeller balancer (off the shelf)
As you can see, all of these components are available off the shelf. You can order each component (maybe all of them from Amazon!), have them shipped to you, and assemble your own UAS for mapping. That said, someone who has gone through the process of building, flying and producing a valuable deliverable that you can make decisions from can add value. But, as competition increases, there’s no doubt that the companies that don’t offer much added value will not be able to operate a sustainable business.
Finally, the U.S. Federal Aviation Administration (FAA) is being surprisingly nimble, approving “333 Exemption” requests at record pace and moving towards using a “summary grant” process to issue bulk approvals of 333 Exemption requests for commercial operations.
UAS presentation from Texas A&M University, one of six FAA-designated UAS test sites.
You may want to take a look at some of the other presentations at the APSG meeting. They were very good. Here’s a quick summary of each by Jon Stigant, long-time member of APSG:
This was a primer in LiDAR technology and methodology — while most of the paper is well understood in the survey community, it is and excellent overview. A reminder for some and a way to fill in the gaps for those not so close to this technology.
Integration of UAVs into O&G Operations — Stacey Lyle, BP (presentation forthcoming)
Stacey provided a valuable summary of the direction in which the FAA is going to regulate the emerging UAV technology. A “must read” for any company that intends to either provide or use this technology. As with most government regulation there is a lot of detail, the devil is in them. Stacey recommended that the APSG engage by developing some standards for the oil and gas industry.
Ron Hughes theme is massive data and managing it — also something of a common theme for all the talks. He focused on automating data processing and recommended a concept of doing this in an automated way with 80 percent of the data. This requires careful procedural development in collaboration with a given client’s business workflows. He gave an example of a large utility company, and how the development of an enterprise metadata server had functional impact for individual business units, but also had the knock on impact of improving inter-functional/inter-community collaboration within the enterprise.
Mike provided input on Geiger mode LiDAR, differentiating Harris’ approach from the more regular LiDAR methodology. The major difference is in data density, data frequency, volume and speed used from higher flying aircraft covering a larger area faster. Providing 10-cm accuracy and expecting 7-cm acuracy development using a/c at 25,000-ft height. Focus on fast processing of immense data volumes (pedabytes) – 24-hour delivery using Harris proprietary processing. Achieve higher density at lower cost.
Mark introduced developments in GIS associated with Common Operating Picture (COP), focusing on the combining of video and data in GIS system. DPFOS mnemonic: Data Management, Planning & Analysis, Field Mobility, Operational Awareness, Stakeholder Engagement. A new SIMOPS (SIMultaneous OperationS). The key is a single source of approved data. Examples of data required in COP from specific disciplines are provided — ROVs, shore clean-up, life of field data, asset and material tracking, live/recorded video, RT data and weather integration, “in the field’” vessel implementation.
GIS, Geospatial, Geomatics…Organizational Capability Evolution — Brian Boulmay, BP (presentation forthcoming)
Rethinking Geospatial Data Management at a major operator. One Map program — not physical, one-way provision. Focus on users vs. geospatial specialists. Users business driven, specialists IT and S driven. Geospatial data integrity and analytics – people, processes and technology. ID goals — massive deployment worldwide — has to be automated. Federated system — regions only have to deal with their own regional data, not be overwhelmed by whole enterprise on their doorstep. IT has the role of providing/maintaining a worldwide solution.
Update on Spring 2014 APSG meeting — All major networks launching satellites. Very soon will have 30 live in-view satellites (U.S., Russia, Europe and China). RTK coverage in China is the best due to BeiDou, supplemented by both Indian and Japanese systems SBAS. $100 RTK on cell phone giving centimeter accuracy eventually, and changing the commercial dynamic!
Set up for managing and analyzing LiDAR data in Global Mapper. Workflows: terrain modeling, visibility, biomass (change monitoring); asset: inspect and maintain pipelines, as-built modeling, simulation. High-accuracy at relatively low cost, outpacing regulatory management. Much public data available — earthexplorer.usgs.gov. xyz values — minimum height threshold, dense RGB point cloud (almost photographic).
Automated dashboard approach, reducing pilot distraction risk, speeding up RT transfer and operational activity reporting.
Esri Conferences
Here are a couple of neat things from the Esri conferences.
First, Jack Dangermond was his usual visionary self at the Esri PUG conference, making his appearance for the 25th annual PUG. He is a master at communicating his GIS vision.
The Evolution of GIS.
In speaking about the evolution of GIS, Mr. Dangermond spoke about the far-reaching impact of email and stated that eventually web-based GIS will be deployed organization-wide, just like email. I agree with this vision. I believe the only question is timing. Is it two years from now? Five years from now? 10 years?
Onto the less visionary and more tactical tidbits…
Of particular interest to me is high-precision GNSS in the Esri environment. A lot of people I talk to are screaming for this. What does high-precision GNSS in the Esri environment mean?
support for high-precision metadata in ArcGIS Collector (ArcPad already supports this).
support for high-precision horizontal (eventually vertical) datum transformations in ArcGIS Collector.
This is important because Esri is supporting ArcGIS Collector across all mobile platforms (Android, iOS and eventually Windows), and people want to use their smartphones and tablets. ArcPad will never run on iOS or Android, so Collector is the GIS collection tool of choice, at least for the Esri environment. It needs to support high-precision GNSS, and by the looks of the following slide, it will. It’s just a matter of timing…
ArcGIS Collector to support high-precision GNSS.
The other potentially neat product Esri announced was Navigator for ArcGIS. Imagine trying to guide a work crew to a buried valve across town (or in the next neighborhood). Displaying a system or region-wide map of valves would not be an efficient way of driving your way across town to find the valve. However, giving a crew turn-by-turn street directions to the street-level, then displaying the valves on that street section, might be a very efficient way of finding the valve.