For the past several months, controversy has raged over the revelation that Apple and Google tracked mobile subscriber location movements and stored that information in an unencrypted file on the handset, where it was potentially vulnerable to hacking and other inappropriate usage. The resulting Location-gate scandal highlights the sometimes tenuous control of mobile subscriber information versus the business objectives of dominant platform and applications providers. These business objectives may include immediate revenue opportunities from the subscriber being tracked or broader self-interest initiatives, such as collecting marketing data that may be valuable to third parties like advertisers, or building subscriber-reported Wi-Fi access point databases.
Furthermore, while much has been written about the privacy impacts of the collection and use of consumer location information, few articles have clearly outlined the technologies behind Apple and Google’s tracking activities. It is important to fully explore and understand these technology methods, and how they differ from other location technologies in use, in order to properly evaluate the threat posed by Location-gate and to develop responses that maintain privacy while enabling the benefits of location-based services.
Location, Tracking, and Storage
iPhone and iPad subscribers had previously been aware that Apple tracked their location via GPS, because the company notified subscribers when an app required the use of GPS to identify location, and asked them to opt-in. However, soon after Location-gate erupted, Apple’s vice president of software technology, Bud Tribble, testified to Congress in May 2011 that Apple also had been tracking device locations over time using triangulation between nearby Wi-Fi access points and wireless base stations. Triangulation is the moderately accurate method in which the mobile device measures the nearby cell site or access point identifications and possibly signal strengths, typically pinpointing device location to within a few hundred meters.
Following this revelation, Apple’s initial response was that “users are confused” and that it was simply “maintaining a database of Wi-Fi access points and cell towers around your current location…to help your iPhone rapidly and accurately calculate its location when requested.” Soon after Apple location tracking activity was revealed, it became known that Google was doing essentially the same thing, although to a slightly lesser degree (Android phones stored only the 50 most recent coordinate fixes and up to 200 Wi-Fi access-spot locations), and using a similar triangulation method without the subscriber’s explicit knowledge. Google Android devices also have GPS capability.
Why, if both OS providers embedded or leveraged GPS in their phones, would they resort to a less accurate location method, triangulation?
Neither company has provided an answer. We know that the triangulation method uses less battery power than GPS, conserving battery life for other uses while filling in performance holes for GPS in urban and indoor environments. Also, unlike with GPS, mobile subscribers are either not able to disable triangulation or must disable it separately. More relevant is the fact that triangulation allowed the OS providers to identify location automatically and track it over time in the background without the subscriber’s knowledge, for purposes such as building and maintaining a subscriber-reported database of Wi-Fi access points.
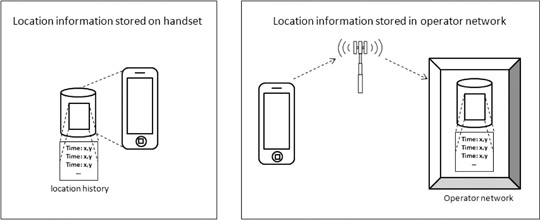
From a privacy perspective, there is a dramatic difference between tracking someone’s location over time (the bread crumb trail that Apple and Google used), versus locating one’s position for a specific purpose and handling the location information only within the confines of a secure wireless network. Useful applications that are universally accepted, such as E911 for safety-of-life situations, employ the latter method.
Other players in the mobile ecosystem, such as wireless network operators, have collected subscriber location information as well, but not by storing it in the device as historical files in the same way that Apple and Google did. Some information exists on the network side in association with billing records for calls (call detail records or CDRs), but this is not bread-crumb tracking of cell-IDs. E911 calls have records stored for use by public safety agencies, but most users never make an E911 call. Other messages containing coarse location may exist on a transitory basis (for example, location area updates), but these are not typically aggregated or stored for later processing.
Depictions of location information stored on handset and in operator network.
Alternative Geo-Location Methods
There exist location methods that provide far greater privacy and security than the location tracking and handset storage that Apple and Google have utilized. Standard methods exist for performing location using the wireless service provider’s network elements. These are called control-plane methods, which follow standards developed by 3rd Generation Partnership Project (3GPP) and 3GPP2. Other standard methods exist using IP transport from the client phone to a location server. These are called user-plane methods, such as the Secure User Plane Location (SUPL) standard from the Open Mobile Alliance (OMA). Both control- and user-plane location standards incorporate mechanisms for data security and user privacy. These standard control- and user-plane methods differ from the proprietary methods used by many client applications and OSs, which are inherently user-plane in nature but with non-standard implementations.
Methods using a client application with handset-based location on the mobile device, also called user-plane methods, bypass the carrier’s wireless network elements and instead rely on an IP connection to transmit information from the client application to a server on the Internet. These user-plane location methods, such as client applications for handset-based A-GPS, as discussed, are already widely in use for location-based services. Handset applications are inherently vulnerable to hacking and privacy intrusions, as the recent spate of mobile viruses on Android has highlighted.
A-GPS is highly accurate at identifying location in direct line-of-sight conditions with the satellites (open sky conditions), as found in suburban and rural areas, but performs less well in challenging dense urban and indoor environments. GPS in the phone can be easily disabled by the end user, and the receiver chip in the handset can cause significant battery consumption when used in demanding applications, such as navigation and monitoring geo-fences. A-GPS, as used by wireless network operators for navigation and other location-based services, does not usually store unencrypted files of historical location information in the handset, as Apple and Google did.
Alternative, network-based, or control-plane, methods make use of the wireless services provider’s network elements to keep location information wholly behind the security of the operator’s firewall, employing highly standard protocols for security and privacy. Control plane location methods are used for today’s safety-of-life applications, like E911, where security and privacy are prime considerations.
One example of a network-based location technology that can work in control-plane is RF pattern-matching (RFPM), which is the only high accuracy, software-based, scalable location solution that requires no additional hardware changes/additions to the mobile device or at the base stations. It compares mobile measurements (signal strengths, signal-to-interference ratios, time delays, and so on) against a geo-referenced database of the mobile operator’s radio environment. RFPM boasts a 100 percent security record for subscriber mobile location information it produces, for critical applications such as E911 emergency call and law enforcement location applications.
Location information for growing consumer uses deserves the same privacy and security protections that other standards-compliant control-plane solutions provide for today’s mission-critical and safety-of-life location applications. RFPM works extremely well in non line-of-sight conditions such as dense urban and indoor environments, where GPS-based solutions face challenges. RFPM also offers low battery consumption and geo-fencing capabilities, which makes it ideal for providing location for the growing opportunity in location-based advertising and other location-based services (widely believed to be the true driver behind Apple and Google’s location tracking activities).
As Location-gate clearly illustrates, there is no shortage of methods to identify and track one’s location via mobile device. Now that the issue has been raised, it is imperative that the entire mobile ecosystem — network operators, OS providers, regulators, and subscribers — clearly understand what methods are used, when one’s location is being identified and tracked, and what is being done with that data. Breadcrumb trails are useful if you’re trying to find your way out of the forest, but not if Big Brother is tracking you.
Marty Feuerstein is chief technology officer of Polaris Wireless, where he leads research into new products, algorithms, system performance, and regulatory activities. He has a Ph.D. in electrical engineering from Virginia Tech.
A system that tracks and monitors valuable high-risk assets for defense and commercial customers has received certification from Iridium Communications, increasing the system’s accuracy and effectiveness. The Iridium constellation of low-Earth satellites provides voice and data services for areas not served by terrestrial communication networks.
The Global Sentinel System, by Cubic Global Tracking Solutions, tracks and monitors assets with two-way, redundant encrypted communications. The system provides up to 2,000 unique geozones for each Global Sentinel device to control precise reporting rules along the supply chain. It can monitor asset conditions including temperature, humidity, light sensing, motion, and container door status.
The latest generation of Cubic’s Global Sentinel System provides continuous global coverage by incorporating the Iridium 9602 short-burst-data transceiver. “As an Iridium partner for the past seven years, we’ve worked closely to integrate the Iridium 9602 transceiver into Cubic’s fifth generation of products,” said Mary Ann Wagner, president of CGTS.
Wagner said Cubic relies on Iridium to provide real-time low latency reporting on customers’ assets in areas where other modes of communication are unavailable. This capability allows for continuous global coverage for reliable secure reporting of asset position, status, and event alerts. “This is essential because of the critical nature of the assets we are tracking and monitoring for our Department of Defense and commercial customers,” Wagner said.
Power-Saving GPS. GPS also plays an important role. With the flexibility derived from geozone attributes for GPS, Cubic can provide an optimum balance between position accuracy and power management.
Cubic’s devices take full advantage of GPS receiver circular error probable (CEP) estimates to set accuracy limits for reporting, explained Randy Shepard, vice president of technology innovations for CGTS. While higher position accuracy may be a challenge for battery-powered units operating for years between servicing, it is often necessary to avoid false alarming for events like route deviation where position accuracy is important.
“One of the unique features of Cubic’s devices is the aggressive manner in which we manage power for all device functions including GPS,” Shepard said. “Using the geozones that are remotely reconfigurable on the device, GPS accuracy and response time can be controlled as a function of geozone.
“As an example, for our current GS-5B receiver used for global tracking and monitoring of shipping containers, the initial default dwell time to capture GPS position is 60 seconds. Our experience is that from a cold start we get a normal lock in less than 45 seconds. The maximum acceptable CEP is 100 meters. If a CEP of less than 100 meters is not received, we do not update position. If a CEP of less than 100 meters is received, we wait up to an additional 60 seconds to improve the CEP. Once a CEP of 10 meters or less is received, the position is captured and the GPS receiver turned off. Again, all four of these parameters are remotely reconfigurable for each of the 2,000 user-defined geozones.”
The other GPS receiver parameter that is configurable as a geozone attribute is whether power is maintained on the receiver to retain satellite ephemeris data. If the position update interval for a geozone is more often than every 15 minutes, data back-up power is usually maintained on the GPS receiver and the satellite ephemeris data is retained. This provides and effective warm start for the GPS and usually results in a much quicker initial position lock, which saves overall power.
To provide real-time asset tracking worldwide, Cubic’s Global Sentinel System relies on a variety of transmission links to communicate the positioning and status of an asset. Based on the location of the asset, the system selects whichever link is the most cost-effective for data transmission. This includes wireless mesh networking, cellular, or the ubiquitous global two-way coverage of the 66-satellite Iridium constellation. The Global Sentinel System relies on the Iridium network’s ability to eliminate blind spots when the asset is out of range of other routing methods.
By Pere Molina, Ismael Colomina, Markus Troger, Bernhard Hofmann-Wellenhof, and Carmen Aguilera
A pocket tracker for elderly people and Alzheimer’s patients consists of a smartphone using GNSS, WLAN, RFID, and GSM for basic positioning, communication channels, and an accelerometer triad for collapse and motion detection. It seeks to determine not only the quantitative where but the qualitative how: has the user lost balance, fallen, or ceased moving?
Accidents involving senior citizens and handicapped people have increased dramatically over recent years. Elderly people, especially those with Alzheimer’s disease, often get in situations where they need assistance due to disorientation or after a physical collapse. The Infrastructure Augmented Galileo/GNSS Receiver for Personal Mobility (IEGLO) project incorporates seamless indoor and outdoor positioning and emergency call services for healthcare applications.
Positioning is very important in such applications, but this target group has another key requirement: 30 percent of elderly people fall at least once per year. Furthermore, falls are responsible for 70 percent of accidental deaths in persons more than 75 years old. 71 percent of falls had physical consequences: 7.7 percent caused broken bones, and 21.7 percent needed medical aid. Moreover, 64 percent of fallers feared of falling again.
IEGLO seeks to establish automatic and reliable fall detection, through a personal device that can indicate a loss of balance of the carrier. This navigation enhancement — traditional orientation plus information about the personal behavior — has been called qualitative motion analysis (QMA).
System Overview
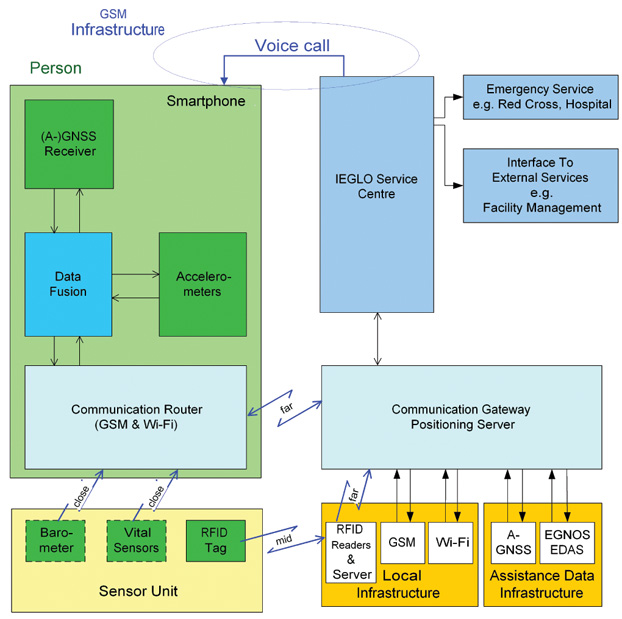
The IEGLO system concept, shown in Figure 1, consists of three parts: a mobile unit with an external sensor unit; a communication gateway/positioning server (CG/PS), and a service center.
Figure 1. Overview of Infrastructure-Augmented Galileo/GNSS Reciever (IEGLO) system concept.
A commercial-off-the-shelf smartphone with integrated sensors and an RFID transponder represent the components of the mobile unit located at the monitored person. The mobile device cannot be fixed to the body in an precise initial attitude, but must move along with the person in order to capture his/her movements. Distress situations are detectable and alert messages can be generated manually or automatically at the mobile unit.
The mobile unit includes a GPS receiver able to process assisted-GPS data. A Wi-Fi adapter provides additinal communication when Wi-Fi access points are available, or if a determined access point is self-monitored. However, the main communication function in the mobile unit is provided by the GSM module. Both Wi-Fi adapter and GSM module, are also used for positioning purposes. An orthogonal accelerometer triad is integrated in the device and provides accelerometer measurements. For near-field communication, a Bluetooth interface is available. Through it, other sensors such as barometers or vital-signs sensors could be polled.
The RFID transponder forms together with the smartphone the mobile unit. RFID information including the transponder ID is sent to an RFID reader when the person passes by an RFID gate. Several pieces of RFID data are gathered on an RFID server, which sends the information necessary for positioning to the CG/PS.
The CG/PS is responsible for the position calculation. Through a TCP/IP interface, it recieves sensor data from the mobile device and processes it with additional reference information from Wi-Fi, GSM, and RFID positioning. A filter/fusion module calculates one integrated IEGLO position from the different determined positions. That position, together with quality information, is transmitted to the service center. The CG/PS also instantly forwards alarm and status messages from the mobile device to the service center.
The service center forms the interface between IEGLO operator and users. It stores databases of position information and personal information. The geo-database contains all information about the positions of the monitored person. The personal database contains user information, emergency contacts, and nursing staff.
The user interface at the service center is Internet-based. A standard desktop PC with web browser relays alarm messages from the different mobile devices and manages user data and nursing staff information. In cases of alarm, the event is instantly displayed via the user interface. Information such as body behavior, position, and location of the user are visualized for the operator, who can then start the alarm chain, which includes as a first measure contacting the mobile user. As further measures, emergency services can be contacted and guided to the person in distress.
Quantitative and Qualitative Nav
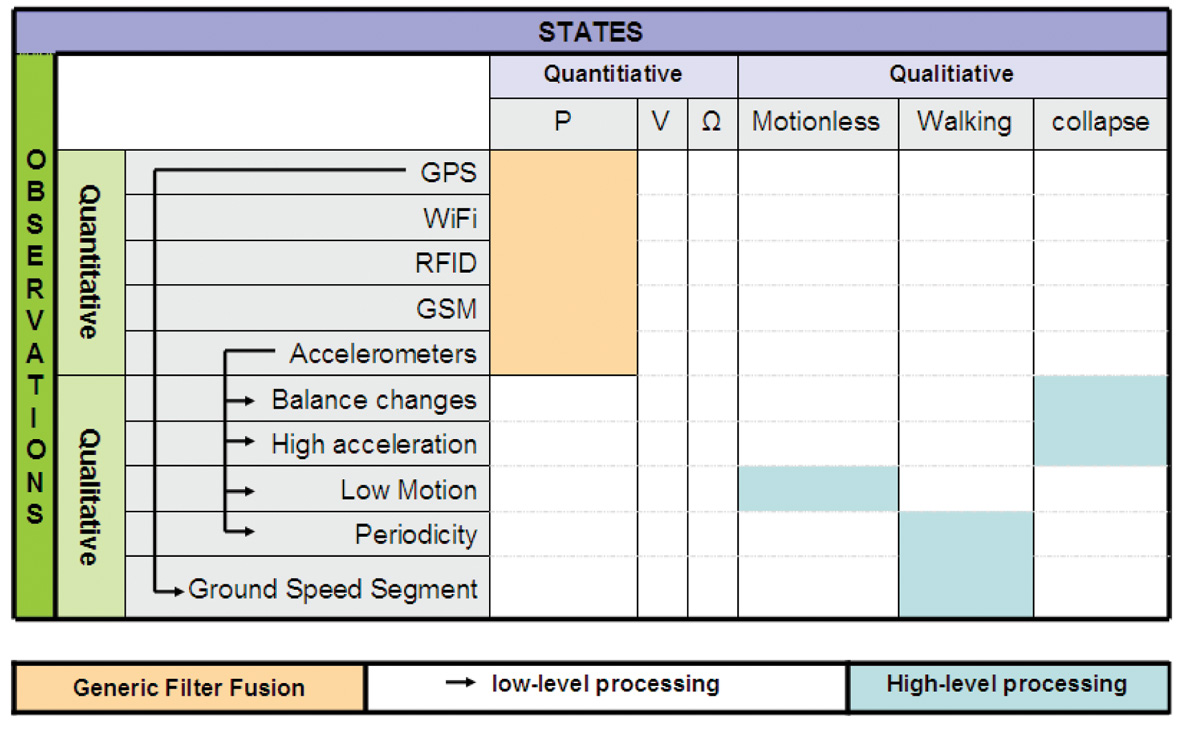
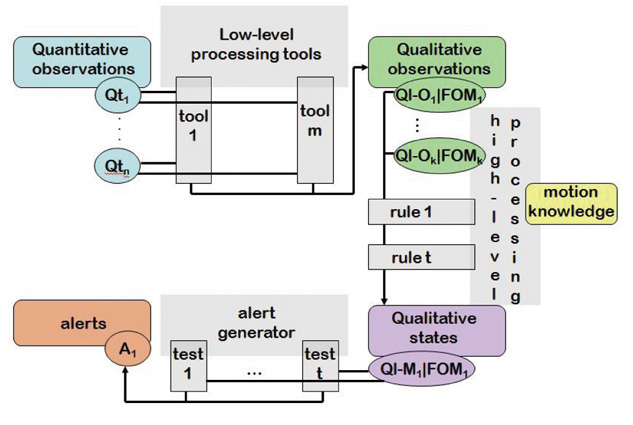
In this article, non-conventional INS/GNSS integration refers to classical, or quantitative navigation, combined with what we have named qualitative navigation. Roughly speaking, quantitative navigation provides the where, while quantitative navigation furnishes the how. Qualitative navigation was a key requirement for IEGLO, as the patient’s primary information of interest is her or his safety status. Figure 2 summarizes the relationships between quantitative and qualitative observations.
Any type of navigation, particularly quantitative navigation, is characterized by a navigation space. For example, in INS/GNSS navigation the navigation space N or state space is P × V × Ω (the set of position, velocity and attitude vectors) and the navigation function
T → P×V×Ω
t → (p,v,ω)
maps the time t into a particular navigation state (p(t),v(t),ω(t)). Typically,
T ⊂ R, P = R3, V = R3 and Ω = [0,2π]3. It is well known that there are various choices for the navigation space, from the simple point navigation where N = P to the complex N = P × V × Ω × B, where B includes time-dependent calibration and other ancillary states.
Qualitative navigation differs from classical quantitative navigation in the navigation space and, clearly, in the navigation function T → N. To illustrate the idea, let us compare and describe the classical quantitative navigation space P × V × Ω with one possible P′ ×V′ × Ω′ qualitative navigation space. While for quantitative navigation we have
t ∈ T ⊂ R,
p = (x,y,z) ∈ P ⊂ R3
v = (vx , vy , vz) ∈ V ⊂ R3
ω = (ωx, ωy, ωz) ∈ Ω = [0,2π]3,
for qualitative navigation we might have
t ∈ T ⊂ R,
p′ ∈ P′ = {hospital, home, park}
v′ ∈ V′ = {not moving, walking, running}
ω′ ∈ Ω′ = {standing, lying, sitting}.
Quantitative navigation is not just about providing estimations of the navigation states; the stochastic figures describing the precision of the estimated states are also provided. Thus, quantitative and qualitative navigation spaces are extended in dimension to include the precision space component, namely ΣP ×V ×Ω and ΣP ×V ′ ×Ω′ .
Navigation theory claims that navigation states might be estimated from observations through the appropriate dynamic and static models (differential and ordinary stochastic equations). Such a statement applies for both proposed navigation approaches, quantitative and qualitative. Thus, the relation model-observation-parameter can be written as l → h(l, X ) for the quantitative case, where:
the quantitative observations l are usually obtained by performing the navigation sensor measurements (INS, GNSS, and so on).
X ∈ P × V × Ω × ΣP×V×Ω
h represents the model that relates l with X (INS mechanization equations, GNSS position models, and so on)
and for the qualitative case, the relation can be written as f → q(f,M), where:
the qualitative observations f are obtained from quantitative observations by performing low-level processing.
M ∈ P′ × V′ × Ω′ × ΣP′×V′×Ω′
q represents the model that relates f with M, based on high-level processing.
In the IEGLO project, this theoretical approach has been materialized by defining the appropriate quantitative and qualitative observation and navigation spaces.
Quantitative Navigation
Quantitative navigation in IEGLO is based on positioning; thus, no quantitative velocity or attitude determination is performed. This leads to a very specific navigation space:
t ∈ T ⊂ R
p = (x,y,z) ∈ P ⊂ R3,
IEGLO uses different positioning technologies for indoor and outdoor positioning; GPS serves as the main positioning method outdoors, while Wi-Fi and RFID are used primarily for indoor positioning.
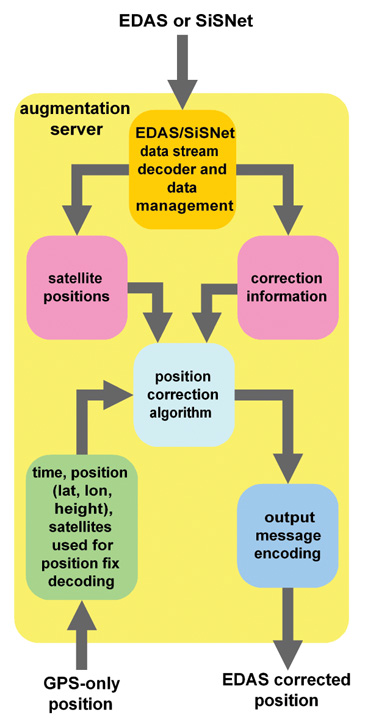
A GPS position augmentation service has been developed to augment GPS-only position solutions using European Geostationary Navigation Overlay Service (EGNOS) information acquired via the local area network and the Internet. The augmentation service is useful for receivers which are not capable of processing EGNOS data, but also for receivers which cannot receive EGNOS signals due to signal shadowing by urban canyons or the like. In this case, the GPS-only position is transmitted to the augmentation server, which corrects the position solution and retransmits the EGNOS Data Access System/signal-in-space through the Internet (EDAS/SiSNeT)corrected position. Figure 3 shows the functional modules of the augmentation server. EDAS provides access to the wide-area differential correction of EGNOS. SiSNeT is a free service that provides EGNOS widea-rea differential corrections and integrity information over the Internet.
Figure 3. Position augmentation server functional modules
The augmentation server accesses EGNOS information from EDAS or SiSNeT, decodes the data, and stores it in a database. As a backup solution, if EDAS cannot be accessed, the augmentation server can also interface to an EGNOS receiver to decode the EGNOS signal in space. The augmentation server is provided with ephemeris and ionospheric information from EDAS/SiSNeT. The GPS position is received from the correction requesting unit together with its time and used satellites. It is corrected at the augmentation server and retransmitted back to the requesting unit.
From the mobile device, sensor information is transmitted to the CG. The sensor data is processed into positioning messages with additional reference information for Wi-Fi, RFID, and GSM positioning. A generic filter method determines a reliable IEGLO position from the different determined positions, which is transmitted to the service center together with the accuracy and time information. The choice of the position depends on its accuracy and its age.
Qualitative Navigation
Positioning is, indeed, the main navigation component in IEGLO. A main goal of the project is to be able to contact a person in case of an emergency anytime, anywhere, and thus position is sufficient. But beyond this sufficiency, a broader navigation concept can be developed using two of the available sensors in the IEGLO system: the GPS receiver and the 3-axial accelerometer. As described earlier, these two sensor measurements (quantitative observations) would yield some motion features of the person (qualitative observations) with which to estimate the motion context of the person (qualitative states). This is a two-step processing: low-level and high-level.
Low-Level Processing: from quantitative to qualitative observations. As depicted in Figure 2, the qualitative observations used in IEGLO are: ground speed segment, balance changes, high accelerations, low motion, and periodicity. These qualitative observations are low-level processed in two steps. First, robust and non-robust statistical estimators (based in order statistics like the median, median absolute deviation normalized (MADN), α-trimmed mean and deviation, or least-squares like the mean, standard deviation, respectively), and deterministic analyzers (such as the fast Fourier transform (FFT), velocity transformation (VT), equidistant maxima search (EMS) are applied to estimate some intermediate values, like the first and second statistical moments, maximum and minimum values, and FFTs. Secondly, these intermediate quantities are evaluated using propositional calculus to decide if a situation is finally detected. All the qualitative observations’ extraction in IEGLO are described as follows.
On one hand, GPS positions are used to compute the ground speed segments of the device. That is, given a sample of GPS positions P = {(ti, pi )}Ni=1 , the ground speed sample is extracted through a finite difference-based technique called velocity transformation (VT). Thus, a speed sample S = {(ti, si = ||pi − pi-1||ground)}Ni=2 is obtained. In addition, this sample is statistically through robust and non-robust estimators yielding E(S) and, thus, deriving the person’s ground speed profile.
On the other hand, accelerometers are the key sensors to enable qualitative observation computation to later derive a qualitative attitude, that is, the detection of a collapse. Accelerations are involved in the computation of four types of qualitative observations, and its use is based on the following three statements:
Independence of any initial attachment or placement of the device on the body is fundamental to ensure a loose and easy start-up of the device.
Independence of any sensor error-calibration should not be an issue.
Balance is the key observable to perform collapse detection.
First, balance changes are extracted from accelerometers as they sense the gravity vector projection on each axis, and any change on these projections is interpreted as balancing the device. Indeed, balance is not exactly attitude: the gravity vector defines a normal plane, called equilibrium plane, which is a 2-degree-of-freedom object. Nevertheless, the left degree-of-freedom not sensed in this approach corresponds to the heading changes, which do not contribute to collapse situations. Therefore, given a 3-axis acceleration sample AN = {(ti , aix , ai sup>y , aiz)}Ni=1, an analysis is performed using robust and non-robust statistical estimators, as monitoring the first and second statistical moments of this sample enables detection of variations on the gravity distribution among the axes. Finally, thresholding is performed on the propositional calculus to obtain balance change extraction.
Second, given an acceleration sample AN , high accelerations are extracted using the distance operator di= || ai − E {AN} || and a threshold-based propositional calculation.
Third, accelerations are also used for low-motion detection. Given an acceleration sample, AN, first and second moments of the acceleration norm sample (E( || AN || )) and V ar(AN ) = E(( || AN || − E( || AN || ))2)) are computed and evaluated through threshold-based propositional calculations to detect norm-wise low-acceleration profiles.
Finally, accelerations are the key observations to perform periodicity detection. Given a set of accelerations AN, two deterministic analyzers are used to extract periodicity patterns: EMS and FFT. The first technique enables computing j local maximum values, one for each sub-sample ANj, j = 1…m, where AN = Umj=1ANj. Evaluating the j local maximum values interdistance along time against some thresholds enables periodicity detection. The FFT analysis complements the periodicity detection achieved by the EMS technique.
In addition to the extraction itself, a figure of merit (FOM) is computed for each qualitative observation. Consisting of a rational number between 0 and 1, it is an empirical magnitude describing how many extractions have been done for a certain observation in relation to the maximum possible amount of extractions. This figure enables a reliability computation similar to a discrete probability function. Nevertheless, at this stage of development we do not claim completeness and therefore do not state that FOM computation is a discrete probability function.
High-Level Processing: from qualitative observations to qualitative states. So far, one may think that the navigation requirements are already fulfilled: a person can be localized, in a seamless indoor and outdoor way, and thus can be feasibly reached if needed. But IEGLO seeks to enhance this navigation concept to provide contextual information about the person, and eventually activate automatic warning messages in case of undesired motion behavior. To do this, the qualitative navigation concept has been developed by analogy of the quantitative navigation: [qualitative or quantitative] observations are used to estimate [qualitative or quantitative] states.
The qualitative states in IEGLO are:
t ∈ R
V′ ∈ {motionless, walking}
Ω′ ∈ {collapse}
This particular choice of the navigation state is fully driven by the user requirements. With the estimation of the collapse and motionless states, IEGLO can provide the user with an automatic distress detection system. These two states specially represent the type of undesired behaviors that IEGLO seeks to detect and respond to. In addition to the distress states, walking is useful to support the pedestrian navigation concept, which is based on single point navigation.
As can be seen in Figure 2,
collapse estimation is performed by means of the balance change and high-acceleration qualitative observations
motionless estimation is performed by means of the low-motion qualitative observation
walking estimation is performed by means of the ground-speed segment and periodicity qualitative observations
In all cases, the weighted combination of the qualitative observation FOMs is performed to determine the qualitative state FOM, as a degree of truth. The role of the FOMs is crucial when generating automatic alarms in case of eventual distress situations. The more accurate the FOM, the fewer false alarms are generated.
Note that in this high-level processing approach, every model q(f,M) must be fed by values that are external to the process. These values help to fine-tune the adjustment of the model to the user carrying the device. In pedestrian navigation, values like step strength and time-to-step play a role in the walking model and fully depend on the individual’s way of walking. In IEGLO, the knowledge of the individual user is a key piece to properly perform qualitative-state estimation. The IEGLO approach is implemented architecturally to allow to input and removal of data about a specific individual’s motion habits. Figure 4 depicts the architecture of the kinesic behavior detection (KBD) module, the software platform where these qualitative navigation concepts have been implemented.
Figure 4. IEGLO KBD module architecture.
Position Augmentation Tes
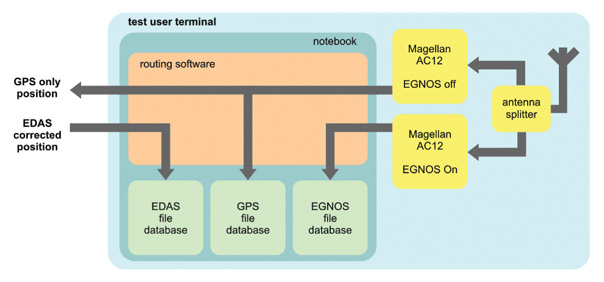
To test the augmentation service, a test user terminal (TUT) has been specified and assembled. The TUT uses two identical GPS/EGNOS receivers, interfaces directly with the augmentation server, and processes the position response. One receiver has been configured to output GPS-only position information, the other to use EGNOS corrections for the position computation. The position of the GPS-only receiver was forwarded to the augmentation server. The EDAS/SiSNeT corrected position information was routed to the EDAS file database. In this manner, three different calculated positions of one point per epoch are available: GPS-only, GPS/EGNOS, and GPS/EDAS/SiSNeT (see Figure 5).
Figure 5. Modules of Test User Terminal.
A low-cost patch antenna providing single-frequency (L1) output was used for the tests, connected to an antenna splitter. A notebook computer provided an interface to a GSM/GPRS module and to the receivers.
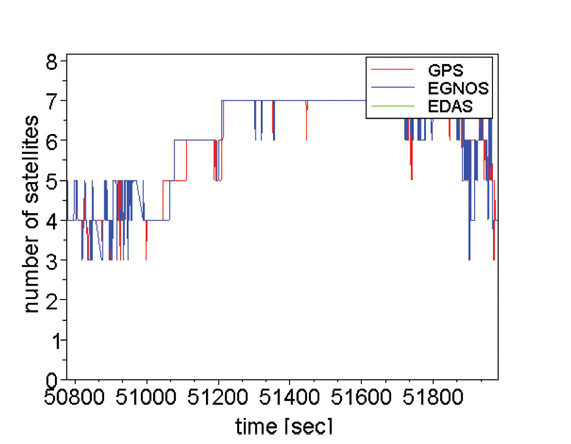
An April 2010 test was conducted in the area surrounding an assisted living home. Figure 6 shows the number of satellites used for positioning during the measurement campaign. The area around the building was very hilly, so satellite signals were exposed to shadowing effects at the beginning and at the end of the measurements. The middle of the campaign had good satellite visibility.
Figure 6. GPS/EGNAS/EDAS: Number of satellites.
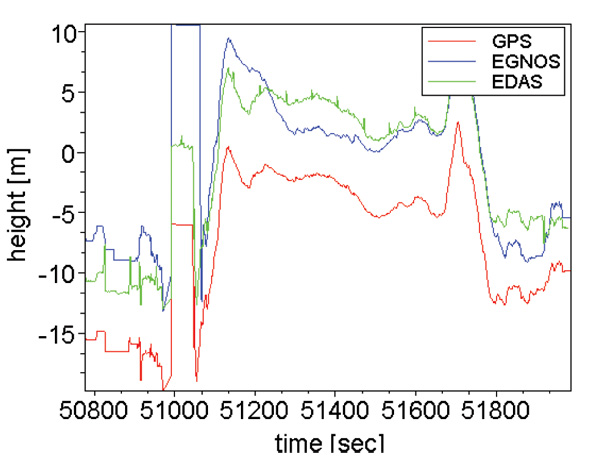
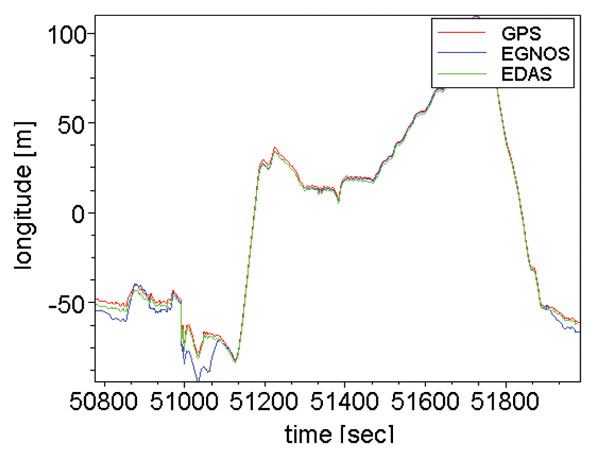
Figures 7–11 show the user trajectory during the dynamic measurement. For better readability, longitude, latitude, and height values were reduced by the mean value of the corresponding coordinate. Therefore, the zero line in the y-axis of each plot symbolizes the mean value of the whole measurement. The same configuration is used for the five plots.
Figure 7 demonstrates the good performance of the augmentation server concept regarding the height solution. The ionospheric delay, which can be corrected with the EGNOS signal, particularly influences the height component of the position. Thus, the potential of the EDAS/SiSNeT-based correction is seen in the height plot.
Figure 7. GPS/EGNOS/EDAS: Height plot.
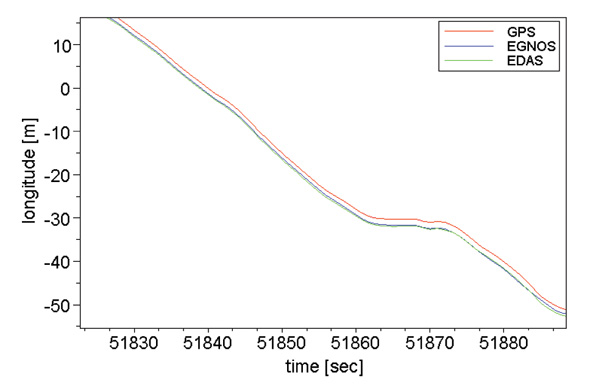
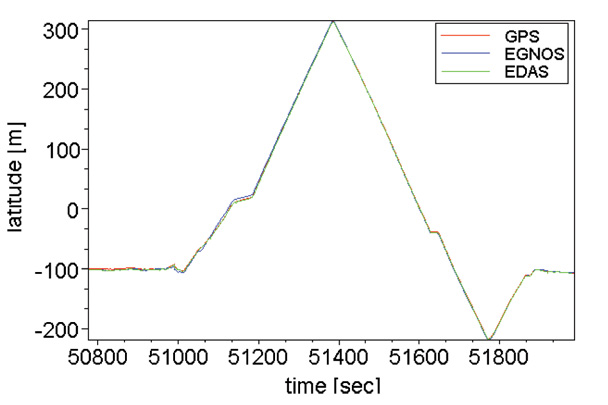
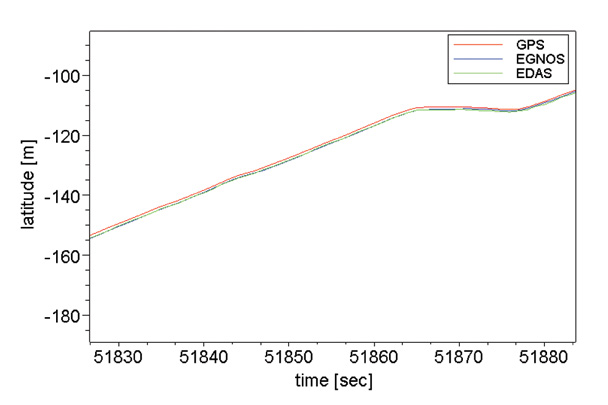
Figures 8 to 11 show the longitude and the latitude of the different solutions. Two plots of each coordinate were used: the first one shows the coordinates during the whole measurement, and the second one emphasizes the time interval between second 51820 and second 51890. Here, the EGNOS and EDAS/SiSNeT solution are very similar. In some other parts of the measurement, the EDAS/SiSNeT solution is closer to the GPS-only solution.
Figure 8. Longitude overview for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 9. Longitude zoom for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 10. Latitude overview for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 11. Latitude zoom for the GPS, GPS-EGNOS and GPS-EDAS position solutions.
Note that during the whole test, the EDAS/SiSNeT solution was determinable, meaning that even during blockage of the EGNOS signal-in-space, a position augmentation was possible. However, the quality of position augmentation always depends on the quality of the GPS-only position. The test shows a diverse image of the performance of the augmentation server.
The functionality of the augmentation server could be shown.
All positions transmitted to the augmentation server have been processed and transmitted back in corrected form.
Some measurements clearly show the benefit of position correction of the augmentation server, where the EDAS/SiSNeT solution tends to the EGNOS solution
Some measurements show a better height solution than the GPS solution (Figure 7).
The quality of the augmented position strongly depends on the quality of the GPS-only position.
Any receiver only capable of processing GPS but not of EGNOS would benefit from the augmentation server concept.
Collapse, Motionless, Walking Tests
To validate the proposed qualitative navigation approach proposed, a test pattern was specially designed to test the KBD module for two different purposes. On one hand, and by definition, the test pattern should represent all the situations in which detection must be tested, that is, the defined qualitative states: collapse, motionless, and walking. At the same time, the test design should provide means to prove the KBD module resilient against these issues:
False alarms: Users of similar systems have stated that false-alarm generation is the key problem of automatic-detection-based systems of any kind. False alarms are generated when a situation is misunderstood and treated as a undesired situation, causing the system to generate an alarm. In the IEGLO case, some situations such as sitting, walking up or down stairs, or picking up the phone are, motion-wise, similar to the collapse situation. Therefore, the test design includes sitting and picking up the phone, to assess KBD module robustness against false alarms.
Initial Attitude. Many pedestrian navigation systems are constrained by the initial placement and/or attachment to the user. Some systems integrates gyroscopes, and therefore their initial attitude with respect to a person-relative frame needs to be known quite precisely. Other systems based on step detection and gait analysis rely on foot-mounted or hip-mounted accelerometers. The IEGLO approach, driven by the user needs of elderly people and Alzheimer’s patients, cannot assume such constraints. An inconspicuous, yet at the same time, familiar system is desired, and no specific initial attitude is required. Therefore, carrying the phone in a pocket (which turns out to be a preferred placement) shall be sufficient, and its actual initial attitude shall not be relevant.
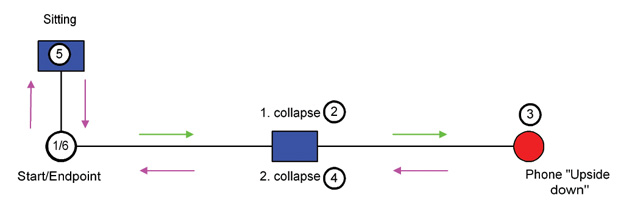
The test design shown in Figure 12 therefore consists of walking to Point 2, where a collapse situation and a motionless period lying on the floor are performed. After standing up, those actions are duplicated to reach Point 3. There, after standing up, the phone is taken out of the pocket and replaced upside down with respect to the previous attitude. The sequence is repeated to return to the start. Finally, the design leads to Point 5, where a sitting action is performed. After standing up, the end point is reached, and the phone is taken out of the pocket.
Figure 12. Sample correlation function showing two peaks.
Data was collected on four tests. Basically, the inputs of the IEGLO KBD module show that the GPS trajectories are quite discontinuous and different among them. Different visibility conditions, eventual multipath, low-cost receiver performance, and phone position in the pocket are just some examples of causes for the GPS trajectories’ discontinuities. But in any case, these are the conditions that pertain in real use, and therefore draw a very realistic test frame.
Estimation of Qualitative States. Each data acquisition is composed of 16 different possible qualitative states: two collapses, four motionless periods, five walking periods, and five other misleading situations (sitting, taking the phone out of the pocket).
The KBD module estimates the collapse and motionless states perfectly; that is, there were no missed detections (thus no risk on the user’s side) and no false alarms (no risk on the system side) were generated during the execution of the KBD module in the four tests.
For walking detection, two modalities were tested: the accelerometer-only detection and the combined accelerometer/GPS combination. The first mode used qualitative observations only, derived from accelerations, and the second mode used qualitative observations derived from both accelerations and GPS positions. In the first mode, 66 percent of the walking time was properly detected, with 2 percent of false alarms, and 32 percent of missed detections. The acceleration-only approach seemed to work well in very evident walking situations, but at the start or end of walking action, when there is a increase or decrease of motion, the approach was not able to capture a proper walking situation. Nevertheless, when GPS-based observations were used, the results improved up to 80 percent, and missed detections were reduced to 18 percent. Note that the walking state was the only non-distress situation. Therefore, missed detections in that case were definitely not critical for personal safety.
Conclusions and Next Steps
IEGLO uses GNSS technology as the main positioning method in caregiving applications. As healthcare assistance is not a core GNSS application, this potentially expands GNSS adoption.
The combination of indoor/outdoor location technologies using mass-market off-the-shelf devices was the key innovation of the project. Different localization methods were used to obtain a reliable user position.
During the project phase, the position augmentation server was used to enhance the GNSS positions on the server side. If signal blockages occurs or if the mobile units are not able to receive and process the EGNOS signal-in-space, position corrections can be still accomplished. Tests showed that augmented positions provide higher accuracies in the majority of measurements, particularly in the vertical dimension.
With respect to qualitative navigation, the KBD module enhances the navigation domain to gauge user context in addition to user position. Some qualitative states were selected for the KBD as of particular interest for u
ser requirements: collapse, motionless, and walking situations. Results show nearly perfect detection of the first two qualitative states and an 80-percent correct detection of the third.
Further research on qualitative navigation should address the personal signature issue: it is of the utmost importance to determine the biometric characteristics of each user. Customizing the KBD for each user, can provide a deeper analysis of user motion and behavior, such as fatigue, leading to proactive prevention of distress situations.
We may also anticipate GPS receiver improvements in smartphones, as navigation technology gets cheaper, smaller, and better. Potential improvements in walking detection may thus occur through reduction in the number of missed detections. Finally, it is of great interest to investigate other scenarios in which the KBD makes sense: indeed, motion analysis is of interest for many applications such as videogames and personal safety. User requirements must be gathered to contextualize such concepts and to determine KBD software modularity and extendibility.
Acknowledgments
This research received funding from the European Community’s Seventh Framework Programme (FP7/2007-2013) under grant agreement n226971.
The authors thank all IEGLO consortium partners (OECON GmbH, Germany; PIAP, Poland; Tele+ Italia S.A.S, Italy) for their contributions, and a special mention to M. Eulàlia Parés for her work on the qualitative navigation concept and general support.
Manufacturers
The Magellan AC12 served as the GPS/EGNOS receiver in the tests.
Pere Molina is a research assistant at the Institute of Geomatics in Barcelona, where he obtained an MSc in airborne photogrammetry and remote sensing.
Ismael Colomina is the director of the Institute of Geomatics. He holds a PhD in mathematics from the University of Barcelona and is a mem-ber of the Editorial Advisory Board of GPS World.
Markus Troger works for TeleConsult Austria GmbH as system engineer and project manager in positioning and navigation. He received a master’s degree in geomatics science from Graz University of Technology, Austria.
Bernhard Hofmann-Wellenhof received his Dipl.- Ing. and doctoral degree from Graz University of Technology, where he is a professor of navigation and satellite geodesy. He is a founder and managing director of TeleConsult Austria GmbH.
Carmen Aguilera is market development officer at the European GNSS Supervisory Authority. She holds a masters degree in telecommunication sciences.
With apologies to James Bond, Ian Fleming, and, well, just about everybody else. Here is a grab from my mail bag. The message was subject-lined: GPS Spy Applications.
“I recently suspected my wife of cheating, having been involved with gps as a land surveyor since 1995, I used and application called mobile-spy.
“In order to install the application onto an iPhone you have to “jailbreak” the phone. Once its installed it will forward all text, url’s, and a gps location every 30 minutes if it has satellite availability. To make a long story short, I caught my wife in a pretty precarious spot, or spots. It’s my opinion that she was sneaking out and meeting someone at various spots on our normal routes, little hidden offroad trails if you know what I mean. Well I tested and retested the phones gps and the data from the mobile-spy website where I purchased the software, which is actually sold under the name “retina-x” and they make there money by giving you access to these logs through mobile-spy.com.
“However, my wife contests that all this data is wrong, of course, and she’s never been anywhere near these places. On the other hand, I have a ton of evidence saying she WAS at these locations. She says she’s read an article on AT&T that shows evidence that the gps in the iPhone is faulty and gives out bogus locations. As I said, I tested this a couple of times and it seemed to work perfectly.
“In good faith we’ve agreed to let me take the iPhone and perform more in depth tracking over a span of a few weeks. I am not really a writer but I’ll definitely keep detailed logs of my observations. Have you guys already had this particular issue come up before? If so, I’d love to know anything you can tell me because the way it stands I am getting a divorce unless this application can be proven wrong! My email is [email protected]
Cell phone is XXX.XXX-XXXX, I don’t check voicemails, so if I don’t answer just send me a text with your name and number. I look forward to hearing from you soon.”
Sleep was what I wanted, you know what I got. Wide awake, staying up late, wishing I was not.
CSR plc of Cambridge, UK, and SiRF Technology Holdings Inc., of San Jose, California, on June 26 completed the merger between SiRF and a wholly owned subsidiary of CSR. The merger resulted in “creating a provider of connectivity and location platforms and a company with the scale, technology, and strategy to enable its customers to address the exciting and emerging opportunities in mobile markets,” according to a company statement.
The company said that customers of the enlarged CSR group will be able to deliver new user experiences of connectivity and location technologies in a diverse range of devices such as mobile phones, personal navigation devices, in-car navigation and telematics systems, laptop and netbook PCs, mobile internet devices, digital cameras, gaming machines, cellular accessories, and consumer electronic devices.
“In bringing together the combined capabilities and broad range of CSR and SiRF technologies and platforms, we have created a new force in the industry and a world-class organization with the commercial, technical and operational scale to build on CSR and SiRF’s existing customer relationships and deliver the next generation of connectivity and location enabled products,” said Joep van Beurden, CEO of CSR. “Our strategic goal is to address the existing and emerging needs of our combined customer base for connectivity and location technologies. The potential applications and benefits to the end user of connectivity plus location are only just starting to open up, and these exciting new opportunities will be driven by our unique combination of leading location technologies and connectivity solutions.”
“CSR and SiRF have a shared vision of using innovation to bring the benefits of wireless connectivity and location to mainstream consumers and enterprises and to enable new and exciting user experiences”, said Kanwar Chadha, co-founder of SiRF and newly appointed board member and chief marketing officer of CSR. “We believe that through this merger, our customers and consumers will derive benefits from a much stronger player whose focus is on delivering best in class connectivity and location platforms.”
“Technology innovation represents the foundation for both CSR’s and SiRF’s success in the market place,” said James Collier, co-founder, board member and Chief Technology Officer of CSR. “We look forward to combining the complementary expertise of our teams to take innovation to the next level in our multifunction radio and system platforms to address emerging customer and market needs.”
For CSR’s customers, the merger with SiRF means CSR’s Connectivity Centre products are augmented by GPS technologies that are well respected and enjoy widespread adoption, the company said, while SiRF brings to CSR a strong IP portfolio in GPS and assisted GPS (A-GPS), dead reckoning, and location centric platforms. The enlarged CSR group will have its global headquarters in Cambridge, UK, with SiRF’s headquarters in San Jose becoming CSR’s U.S. headquarters.
The U.S. International Trade Commission (ITC) has said it will review the determination of one of its administrative law judges that previously found that SiRF Technology infringed on patents held by Broadcom subsidiary Global Locate.
The ITC judge ruled in August that certain SiRF products, including SiRFstarIII and SiRFInstant GPS architectures, infringed upon six Global Locate/Broadcom patents; the judge later recommended to the ITC that it issue a ban on the import of related SiRF chips into the United States.
Both SiRF and ITC staff filed appeals independently of one another seeking a review of the ruling. Now, the ITC has said it will review claims on three out of the six patents, according to SiRF.
The commission has requested written submissions from the parties involved to address the form of remedy, if any, that should be ordered. According to the notice, if the commission contemplates some form of remedy, it must consider the effects of that remedy upon public interest, SiRF noted.
The final ITC ruling, slated for December 2008, is further subject to a 60-day presidential review period and can then be appealed to the Federal Circuit Court of Appeals.
SiRF, Qualcomm Play Nice
Apparently SiRF and Qualcomm want to avoid the legal snafu in which SiRF and Broadcom are currently embroiled. SiRF also announced that it and Qualcomm have signed a mutual Patent Non-Assertion Agreement covering each party’s patent portfolio.
“We believe that this agreement between leading innovators of A-GPS enabled location technology will help expand the market for location-enabled products, services and content, while enabling each of us to compete in the marketplace based on product merits,” said Kanwar Chadha, SiRFs founder and vice president of marketing.
It’s been a busy week for SiRF; on Wednesday it took the wraps off its SiRFlinkIII, a single chip that combines a GPS RF front end with a Bluetooth 2.1 + EDR controller.
The U.S. International Trade Commission (ITC) has denied the request of SiRF Technology to review its initial determination that found that Broadcom subsidiary Global Locate Inc. didn’t infringe two SiRF GPS patents.
ITC Administrative Law Judge Paul Luckern had previously ruled that two of SiRF’s GPS patents were not infringed by Global Locate and that the asserted claims of one of the patents were invalid, following a six-day trial last March, according to Broadcom. SiRF had already dismissed two additional patents from the case before trial.
This ITC case is separate from a case in which an ITC judge ruled earlier this month that certain SiRF Technology products, including SiRFstarIII chipsets, infringe six patents related to improving GPS processing and sensitivity held by Global Locate.
Broadcom and SiRF have been battling on multiple fronts over patent infringement claims in federal court, the ITC, and before the U.S. Patent and Trademark Office. The August 8 ITC ruling against SiRF caused the company’s stock to take a pounding on Wall Street.
A U.S. International Trade Commission (ITC) judge has ruled that certain SiRF Technology products infringe six patents related to improving GPS processing and sensitivity that are held by Global Locate Inc., a wholly owned subsidiary of Broadcom.
The infringement findings cover a range of SiRF products, including those incorporating the SiRFstarIII and SiRFInstant GPS architectures, according to Broadcom.
The ruling came Friday, August 8, just a day after SiRF said it had asked the U.S. Patent and Trademark Office reexamine four patents that are the subject of an infringement suit Broadcom has brought against SiRF in federal court. Furthermore, In June the ITC rejected claims by SiRF Technology that Global Locate infringed upon two of its patents, and also found that SiRF’s asserted claims on one of the patents at issue were invalid.
The ruling Friday followed a trial earlier this year. Broadcom said it expects a final determination by the full six-person commission by early December.
The six patents that SiRF was found to infringe are U.S. patents 6,417,801; 6,937,187; 6,606,346; 7,158,080; 6,704,651; 6,651,000 — relating to extended ephemeris assistance, calculating time in GPS receivers, enhancing sensitivity in assisted GPS systems, and implementing hardware structures for parallel correlation, according to Broadcom.
SiRF Technology Holdings, Inc. of San Jose, California, has completed filing with the U.S. Patent and Trademark Office official requests for reexamination of each of the four patents that Broadcom recently asserted against SiRF in the Santa Ana, California, federal district court.
SiRF seeks review and invalidation of all four of the Broadcom patents named in the lawsuit, through its requests for ex-parte reexamination and in view of what it terms “substantial new questions of patentability raised by prior art not previously considered by the Patent Office,” according to the company.
SiRF also intends to seek a stay of the federal district court case.
SiRF and Broadcom have been engaged in an ongoing legal battle over patents held by their respective companies, both claiming patent infringement. In late June, SiRF Technology petitioned the International Trade Commission (ITC) to review part of a ruling that found that Broadcom didn’t infringe upon two of its patents as the company alleged.
A ruling in Broadcom’s six claims of patent infringement against SiRF before the ITC is expected any day. The trial took place in April.
Broadcom Corp. says the U.S. International Trade Commission (ITC) rejected claims by GPS chip maker SiRF Technology, which alleged that Global Locate infringed upon two of its patents. Furthermore, the ITC also found that SiRF’s asserted claims on one of the patents at issue were invalid, according to Broadcom.
Broadcom acquired Global Locate in July 2007; the patent dispute stems back at least to 2006, when SiRF also took Global Locate to task in federal district court; it in turn counter-sued. Those suits were stayed pending the ITC ruling. ITC Administrative Law Judge Paul Luckern issued his initial determination Friday, June 13, following a six-day trial last March in Washington, D.C.
Broadcom also has its own claims against SiRF before the ITC, having filed six claims of patent infringement; that trial took place in April of 2008. An initial determination in that case, heard before Administrative Law Judge Carl Charneski, should come on August 8, 2008, according to the company.
Broadcom also filed a lawsuit in May 2008 in federal district court, claiming infringement of four patents.
Telecom chip maker Broadcom Corp. said Thursday evening that it had completed its acquisition of Global Locate Inc., a privately held provider of GPS and assisted-GPS chips and related software.
The acquisition is a strategic one for Broadcom, which specializes in wired and wireless semiconductors, and is known for its RF technology. The company notes that consumer interest in GPS applications is driving the market for GPS silicon; the market is expected to top $1 billion annually by 2012, Broadcom says, citing market research firm Forward Concepts.
Broadcom envisions combining Global Locate’s GPS technology with its own Bluetooth, Wi-Fi and cellular technologies, and supplying that combination to mobile handset makers.
Broadcom first announced plans to acquire Global Locate in June. Broadcom, which saw nearly $3.7 billion in revenues last year, paid approximately $143 million in cash for all outstanding shares of capital stock in Global Locate. Under the terms of the deal a portion of that payable to Global Locate’s stockholders was put in escrow; up to $80 million in cash will be reserved for future payment to these stockholders, provided certain future performance goals are met.
In connection with the transaction, certain former stockholders of Global Locate are purchasing $3 million of Broadcom’s shares at Thursday’s closing price on the Nasdaq Global Select Market. Broadcom may record a one-time charge for in-process R&D expenses related to the acquisition in its current fiscal quarter, which ends Sept. 30. The amount of that charge, if any, has not yet been determined.
Honeywell this week introduced its Honeywell Instant Location System (HILS), a real-time asset management application that integrates a number of technologies, such as Ultra-Wideband, GPS, Wi Fi and RFID, with Honeywell’s process automation system, Experion Process Knowledge System.
Installed at locations throughout a facility, receivers can pinpoint the location of an employee or piece of equipment and send the information to the HILS server, which directly feeds the information to the operator’s workstation, according to Honeywell. The receivers can transmit data wirelessly using Honeywell’s OneWireless network.
One of the system’s major selling points is safety, the company says. Within seconds of a major plant incident, HILS can track employees and visitors through personal tags attached to their clothing and generate real-time mustering reports. These reports allow emergency responders to quickly obtain accurate head counts and locate missing or injured employees, according to Honeywell.
Integrated with Experion, HILS can use equipment and personnel geo-location information to improve plant safety as well, the company says. For example, HILS can use interlocks to ensure dangerous procedures are only executed when personnel are a safe distance from a process unit or machinery.
“This is the first real-time location system designed with the process industry environment in mind,” Jack Bolick, Honeywell Process Solutions president, said in a statement. “Integrating this technology with the control system produces a solution that gives manufacturers even greater awareness of what’s happening in their facilities. That awareness leads to safer and more efficient operations.”