SBG Systems Chief Technology Officer Alexis Guinamard gives GPS World an overview of the company’s Quanta UAV series, which launched at Xponential 2019 in Chicago.
Tag: UAV
-
Deseret UAS to showcase technologies at AUVSI Xponential
Deseret UAS unveils premier test facilities and technologies from Utah-based companies.
Deseret UAS will be exhibiting at AUVSI Xponential, offering commercial unmanned aerial systems (UAS)/urban air mobility (UAM) flight test facilities.

Deseret UAS headquarters is located at the Xperience Center in Tooele City. (Photo: Deseret UAS) Deseret UAS offers access to wide-open land and airspace, as well as the necessary Federal Aviation Administration (FAA) authorizations for large commercial UAVs and UAM aircraft.
The organization’s commercial flight test amenities include a 4,500-foot paved runway with a covered airplane hangar, mobile test units, certified Part 107 pilots, data analytics, beyond visual line of sight (BVLOS) test capabilities and state-of-the-art training facilities.
“We encourage all Xponential attendees to visit our booth and see firsthand the cutting-edge technologies being developed right here in Utah,” said Deseret UAS Board Chair Shawn Milne. “The unique assets we offer at an affordable cost have been a game-changer for companies seeking to operationalize their technologies.”
The Utah Pavilion will also have Utah-based companies exhibiting their prototypes that have the potential to revolutionize mobility, safety, and security.
Founded in 2017, ElectraFly is an aviation company building a hybrid-electric personal flying vehicle. It aims to increase lift capacity and flight times for vertical take-off and landing aircraft and is positioned between a personal jetpack and a large, helicopter-like air taxi.
The ElectraFly prototype is being built to carry a rider — something ideal for first responders or military special forces. Other versions will be scaled for air taxi or search and rescue, and smaller versions will be ideal for shipping and package delivery.
“There is an undeniable change happening in air transportation but there are problems in efficiency,” said John Manning, ElectraFly co-founder and director of development. “So many people, especially as children, dream about flying. We’re developing innovations to make the dream of personal flight a reality and to shape the future of urban air mobility.”
Fortem Technologies is an innovator in airspace safety and security. Fortem’s AI-enabled SkyDome software and TrueView radar digitize airspace, making it possible to ensure safe urban corridors and to protect infrastructure, venues, borders and cities against rogue drones. This digitization can make drone package delivery and the safe transport of people a reality.
“Safe air mobility of unmanned drones flying beyond visual line of sight is achievable,” said Fortem CEO Timothy Bean. “Fortem Technologies makes this possible by digitizing the airspace so that cooperative and non-cooperative air traffic can be differentiated, assessed for threats, and managed for safety of our airways.”
Also exhibiting at the Utah Pavilion will be officials from the Governor’s Office of Economic Development (GOED) and the Economic Development Corporation of Utah (EDCU). GOED and EDCU will be available to answer questions about economic development opportunities in the state.
“Utah has always been at the forefront of technological innovations that improve lives and the state’s investment in Deseret UAS is evidence of that,” said Ginger Chinn, managing director of Urban and Rural Business Services for the Utah’s Governor’s Office of Economic Development. “We whole-heartedly embrace unmanned aircraft technologies and are proactively developing a plan to build the aerial infrastructure needed for these innovations to flourish.”
-

Teledyne Imaging showcases mapping, object recognition and tracking tech at AUVSI

The Falcon 4 UAV camera. (Photo: Teledyne) Teledyne Optech, Teledyne DALSA and Teledyne Scientific & Imaging, all part of the Teledyne Imaging group, will share a combined presence at Booth #2520 at the AUVSI Xponential 2019 show in Chicago April 29-May 2.
The three companies will showcase their new and advanced sensor and imaging solutions.
Teledyne Optech presents a new compact lidar family, the CL-90. Attendees can preview the lightweight, compact lidar platform for UAV deployment. The CL-90 features exceptional canopy penetration, offering the low-noise, high-quality survey-grade data to deliver extraordinary performance in data accuracy and point precision.
The CL-90 empowers full lidar performance across the entire operating altitude range of the UAV, and offers an exclusive variable field-of-view capability eliminating the need for multiple passes over a target.
Teledyne DALSA will showcases its advanced thermal and visible cameras. The Genie Nano family of low-cost area cameras for UAVs are lightweight, power-efficient and compact.
The Falcon 4 86-megapixel ultra-high resolution and high-speed CMOS camera offers capabilities for large-area, high-resolution, high-speed imaging.
The Calibir series of long wave infrared (LWIR) cameras deliver compact, low-profile thermal solutions, designed for UAV applications such as agriculture, construction, defense and surveying. Calibir is customizable with smart embedded algorithms and capability for real-time VIS-LWIR image fusion.
Teledyne Scientific & Imaging features a new artificial intelligence (AI) software stack capable of real-time performance on board UAVs. The AI stack enables automatic sensor processing for applications such as sensor fusion, asset recognition and tracking, and adaptive dynamic range for deployment in daytime and variable light operations.
-
Research Roundup: Design and evaluation of integrity algorithms for PPP in kinematic applications
By Kazuma Gunning, Juan Blanch and Todd Walter, Stanford University, and Lance de Groot and Laura Norman, Hexagon Positioning Intelligence
UAV and autonomous platforms can greatly benefit from an assured position solution with high integrity error bounds. The expected high degree of connectivity in these vehicles will allow users to receive real-time precise clock and ephemeris corrections, which enable the use of precise point positioning (PPP) techniques.
Until now, these techniques have mostly been used to provide high accuracy, rather than focusing on high-integrity applications. The authors apply the methodology and algorithms used in aviation to determine position error bounds with high integrity (or protection levels) for a PPP position solution.
PPP techniques can provide centimeter accuracy without local reference stations in kinematic applications. These techniques have so far mostly been used to provide high accuracy, and it is only recently that they have been proposed to provide integrity, that is, position error bounds with a very low probability of exceeding them.
There has been preliminary work on the application of integrity to PPP, but it remains a challenge to translate the benefits of PPP to accuracy while maintaining high integrity. Most of the integrity work in PPP and real-time kinematic (RTK) has dealt more with the ambiguity resolution process under nominal error conditions and less on the integrity of the position solution under fault conditions.
The authors overview their PPP filter implementation, and describe the threat model as well as two classes of integrity algorithms: solution separation and sum of squared residuals based (also called residual-based [RB], a misnomer, as all autonomous integrity monitors are based on the residuals.)
They present data sets used to evaluate the algorithms, compare the protection levels (PLs) obtained with different algorithms, and present the results obtained with the most promising PL formulation in four different data sets: static, dynamic in open-sky conditions, dynamic in midtown suburban conditions, and in flight.
Concluding, they state: “We have formulated RAIM protection-level formulas using either solution separation or the sum of residual squares. Both formulations consist of straightforward adaptations of snapshot RAIM to a Kalman filter solution.
“For solution separation, we have shown an implementation where the computational cost of running a bank of filters is far from being proportional to the cost of one filter. Instead, we could run 50 additional filters for the cost of one.
“For residual based RAIM we have developed a set of formulas to update the sum of square residuals from one time step to the next one. Because this test statistic is exactly the same as the one used in snapshot RAIM (when we consider the problem as a batch least squares), we could use the formula that ties the slope of a fault mode to the standard deviation of the solution separation. The slope can therefore also be updated recursively.”
Finally, “we have refined the PPP filter, added one scenario (suburban driving conditions), and examined the effect of considering multiple faults in the formulation of the test statistics and the protection levels. The results are very promising: protection levels below 2 m appear to be achievable, and the computation load is lower than expected.”
This paper was presented at ION-GNSS+ 2018. See www.ion.org/publications/ browse.cfm.
-

Quanta UAV INS/GNSS improves UAV-based surveying
SBG Systems will present its Quanta UAV series at AUVSI’s Xponential show, which takes place April 30-May 2 in Chicago. The Quanta UAV series is a line of inertial navigation systems (INS) dedicated to UAV-based surveying integrators.
Because SBG Systems wants UAV surveyors to save autonomy for additional survey lines, the company has designed a small, lightweight, and low-power INS offered on two levels of accuracy. Quanta UAV and Quanta UAV Extra have been developed for compact lidar to high-end BVLOS mapping solutions. They provide precise orientation and centimeter-level position data delivered both in real time and post processing. This direct geo-referencing solution eliminates the need for ground control points and greatly reduces the need of overlapping.
Qinertia, SBG’s post-processing software completes the Quanta UAV offer. It gives access to offline real-time kinematic (RTK) corrections from more than 7,000 base stations in 164 countries, the company said. Trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions. This advanced software also computes the base station position to quickly provide centimeter accuracy. Qinertia comes free for one year with the Quanta UAV sensor.
Robotics and surveying. Quanta UAV is the result of SBG’s expertise in both miniaturized technology for drone navigation and high-end sensors for mobile mapping. Designed as a geo-referencing solution, it can also be used as a high-end navigation solution to feed the UAV autopilot.
Quanta UAV benefits from a tight integration with in-house IMUs, advanced calibration techniques and algorithms that ensure consistent behavior in all weather conditions, as well as robust position even if the UAV gets close to buildings, electrical lines or trees.
Quanta UAV embeds a web interface for an easy configuration with a 3D view showing all parameters. The calibration tool automatically aligns the lever arm between the two antennas and the sensor, and re-estimates it in flight for more precision.
The ITAR-free Quanta UAV INS are available for order.
Featured photo: SBG Systems
-
Cooperative utility effort takes off with Topcon
Images: Topcon An Arizona electric cooperative that serves more than 33,000 customers is helping prove the value and potential of unmanned aerial systems (UAS) in enhancing the utility’s geospatial information system (GIS) effort.
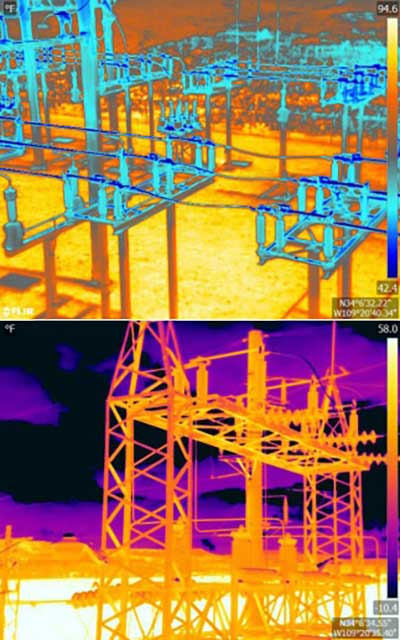
Using an Intel Falcon 8+ Drone — Topcon Edition, UAS specialist Skynetwest is performing missions to illustrate the viability of UAS technology. Initial work for the Navopache Electric Cooperative (NEC) included inspection of a substation, conducted on a windy day that might have grounded traditional aircraft.
Windspeed limits for the Falcon 8+ in GPS mode are set at 26 mph; in height mode that threshold is extended to windspeeds as high as 35 mph.
Using ContextCapture and Agisoft PhotoScan software, Skynetwest created a detailed georeferenced 3D model of the substation.
The Falcon 8+ also has triple-redundancy inertial measurement units (IMUs), double redundant compasses, dual-constellation GPS, eight propellers and two batteries. An algorithm selects the most accurate of the redundant systems to use when the UAS is flying near the electromagnetic frequencies emitted by power lines.
The team easily switched between a camera payload for inspections and one for mapping. Skynetwest’s mapping package takes high-resolution geo-referenced aerial images from various heights within set GPS tolerances. Its RGB camera delivers both orthophotos and 3D models in Topcon ContextCapture software, powered by Bentley Systems.
-
WingtraOne offers RedEdge-MX vegetation camera option

Photo: MicaSense The WingtraOne vertical take-off and landing (VTOL) fixed-wing mapping drone now carries the RedEdge-MX multispectral sensor for vegetation mapping.
The WingtraOne is a VTOL drone that allows for flexible take-off and landing, with automated vertical take-off and landing even on gravel or in forest isles.
The WingtraOne provides wide coverage for comprehensive and high-quality multispectral image gathering, with coverage of up to 160 ha (395 ac) with 8.2 cm (3.2 in)/px GSD at 120 m/ 394 ft in one flight.
The Terrain Following feature provides for intuitive flight planning with fully automated functionality, the company said.
The RedEdge-MX features a patent-pending DLS 2 and a calibrated reflectance panel that enhances radiometric calibration and provides useful data for comparison of results over time, improving crop and stand monitoring.
The camera captures five narrow spectral bands: red, green, blue, near infrared and red edge. It generates plant health indexes and RGB (color) images from one flight, and is calibrated for precise, repeatable measurements.
Standard data outputs are compatible with almost all processing platforms.
Learn more about the bundle here.
-

Maxtena launches GNSS antenna for high-precision and autonomous applications
Maxtena Inc. has introduced a patented GNSS antenna designed for high-precision and autonomous multi-frequency applications. The M7HCT-A-SMA antenna is a high-accuracy, multi-frequency active quadrifilar helix GNSS antenna.

Photo: Maxtena Maxtena is a U.S.-based antenna design and manufacturing company and inventor of the patented Dynamic Aperture Technology.
The new design will offer concurrent GNSS reception on L1: GPS, GLONASS, Galileo, Beidou and L2: GPS L2C, Galileo E5B and GLONASS L3OC in a rugged, compact and ultra lightweight form factor.
The antenna is designed for GIS, RTK and other high-accuracy GNSS applications such as the drone and automotive markets, where high performance and low weight are driving features in antenna selection.
The M7HCT-A-SMA active helix design features Maxtena’s patented compact and lightweight Helicore technology. This technology provides exceptional pattern control, polarization purity and high efficiency in a very compact form factor.
The antenna offers up to 30-dB gain for GNSS applications that utilize GPS, GLONASS, Galileo and Beidou, in one radome housing with a single SMA connector.
The M7HCT-A-SMA will join Maxtena’s line of rugged GNSS helix antennas that are ultra lightweight, small, and precise. The M7HCT-A-SMA weighs 25 grams and is housed in automotive grade PCB plastic with automotive grade electronics and is rated IP67 when mounted.
It is ground plane independent and offers extremely low power consumption and minimal phase-center variation over azimuth. The antenna offers superb axial ratio ensuring multipath error is mitigated.
“Maxtena is very excited to be launching a game-changing antenna for the UAV, drone, and automotive markets, and really for any application requiring a high performance, lightweight antenna that can cover so many frequencies. It is the most robust antenna solution on the market,” said Maxtena Vice President of Sales and Marketing Vanja Maric.
-

Going Beyond. Visual line of sight, that is.
Few commercial UAV operations would be able to inspect transmissions lines, pipelines or train tracks without beyond visual line-of-sight (BVLOS) capability, but these key pieces of infrastructure often situate close to or transit across population centers. Further, many population centers have airports and low-level air traffic. Any tools to keep drones away from air traffic during BVLOS operations will significantly inspection companies. We review three promising solutions here.
Pipeline Inspection
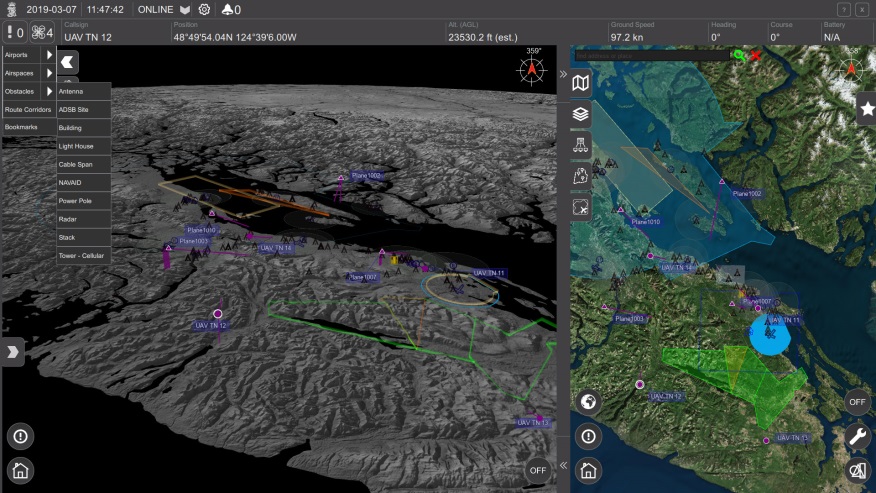
Kongsberg Geospatial in Ottawa, Canada has developed location visualization software tools that are used for air-traffic control, command and control, and air defense applications. The company has several decades of experience in these applications. Its IRIS software was used to support recent UAV oil pipeline inspection operations in Nigeria, providing safety critical airspace deconfliction, supervised by the Nigerian Civil Aviation Authority (NCAA).
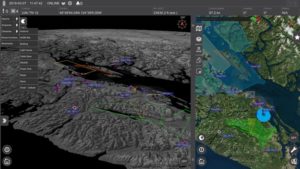
IRIS airspace situational awareness screenshot (Photo: Kongsberg Geospatial) The pipeline project was undertaken by Aerial Robotix, a UAS services provider in Nigeria, who used adapted Kongsberg software in its control center to demonstrate safe BVLOS operations, and was then able to obtain the necessary permits. A Schiebel Camcopter S-100 UAV with a 200-kilometer BVLOS capability was used for flight inspection, operating both day and night, with real time high-definition payload imagery sent back to the control station.

Camcopter S-100 prior to BVLOS pipeline inspection flight in Nigeria. (Photo: Schiebel) Nigeria has a major problem with gasoline theft from pipelines similar to those lines inspected during this project. Recently, 105 people perished in a blast from a ruptured pipe 30 miles north of the city of Umuahia, possibly during scavenging for leaking fuel. It has been claimed that the pipeline had been ruptured by saboteurs earlier, and for the following six weeks villagers had been collecting fuel. Pipeline vandalism is common in Nigeria, even given the risk of fire or explosion, or the risk of prosecution, or even the possibility of being shot on sight.
Unmanned Companion Fighter Aircraft
Boeing just unveiled a concept UAV which is apparently aimed at providing an airborne team-partner for manned aircraft. The concept was introduced at the Australian International Airshow by the Australian Minister for Defense, the Hon. Christopher Pyne MP. The project is slated for a significant R&D investment by the Australian Government and Boeing Australia.

Boeing Airpower Teaming System. (Photo: Boeing Company) 
Boeing Airpower Teaming System. (Photo: Boeing Company) The concept model has fighter aircraft lines with a projected 2,000-mile range, autonomous capability, and significant intelligence, surveillance and reconnaissance sensor capability. Flying alongside manned fighter/attack aircraft with artificial intelligence simplifying control, the Airpower Teaming System is designed as a low-cost force multiplier.
The concept includes a pitch for international collaboration offering significant customization so countries can add local content, a key element for any aircraft program designed for off-shore sales.

XQ-58A demonstrator in flight. (Photo: U.S. Air Force) A day or so after the Airshow (maybe not wanting to be upstaged by Boeing’s announcement?) a release showed up about the first flight of the previously secret XQ-58A Valkyrie demonstrator. This is apparently a program by the US Air Force Research Laboratory (AFRL) partnered with Kratos Unmanned Aerial Systems to develop a UAS which looks to have very similar capabilities to that of the Boeing concept, perhaps at a significantly further advanced stage, with a much more mil-spec UAV sounding name.
The AFRL indicated that the XQ-58A is part of a Low Cost Attritable Aircraft Technology (LCAAT) (guess that means they don’t much mind losing a few) effort to come up with low-cost force multipliers which can be built quickly using commercial technology and operating from unprepared runways.
(From the Air Force: “The thought is to develop an inexpensive, configurable and producible on demand air vehicle. A number of military applications can be envisioned for an air vehicle with such a capability. One potential application is to use hundreds or thousands of such units in a campaign to overwhelm an enemy’s air defenses and “punch a hole” to enable higher value, less replaceable [aircraft] to engage or monitor enemy systems. Another potential application is to augment the capabilities of high-value intelligence, surveillance and reconnaissance, systems which may be limited in a specific campaign by distances, quantities, or threats. For all applications, the weapon system is expected to be an air vehicle that would return to base or to a separate location to be recovered. However, because of the mission and because of the low cost, the air vehicle would be attritable, meaning the Air Force would expect and could afford to lose many of the assets.”)
The current program took 2½ years to get to this flying prototype, which still seems pretty lengthy in terms of today’s commercial UAVs. The first flight from Yuma Proving Grounds in Arizona lasted an hour and a quarter and all went as expected. Five test flights are planned to check out functionality, aerodynamics, and launch and recovery systems. Kratos is perhaps better known for its family of target drones which have been in use by the US and internationally for some time.

Kratos BQM-177 Navy drone declared operational. (Photo: Naval Air Systems Command) Kratos Defense & Security Solutions, Inc. announced in early March that its BQM-177A Subsonic Aerial Target (SSAT) has achieved Initial Operational Capability as reported by the US Navy. A Navy statement said “The first site the BQM-177A will be operated from is Pt Mugu, California. The target is capable of speeds in excess of 0.9 Mach and a sea-skimming altitude as low as 10 feet which provides sea-skimming anti-ship cruise missile threat emulation for the US Navy.”
Parachute System for DJI Phantom 4
Recent testing of the descent rate of a Phantom 4 equipped with a SafeAir parachute system indicated that this UAV/parachute combination may well meet the FAA’s recently published draft rules for flight over people. The parachute system uses on-board indicators to trigger parachute deployment. ParaZero (manufacturer of the SafeAir UAV parachute system) has developed standards, and promises to provide customers with certification data to support waiver applications for flight over people.
Wrap-up
So now we have intuitive software using terrain data and sensor inputs which can provide a visual overlay to supports BVLOS flights, concepts designs and prototypes to support the ‘Loyal Wingman’ approach – flying UAVs alongside existing defense aircraft as force multipliers – and advances towards UAV flight over people using certified parachute safety systems. Just a flavor of the flurry of recent new developments in the world of unmanned aircraft.
-

NovAtel further enhances Waypoint GNSS+INS post-processing

Image: NovAtel NovAtel’s Waypoint Products Group has released version 8.80 of its GNSS and GNSS+INS post-processing software products, including Inertial Explorer, Inertial Explorer Xpress, GrafNav and GrafNet. All Waypoint customers with an active subscription that are within the support period qualify for the Waypoint 8.80 upgrade at no additional charge.
Key features of the 8.80 release include:
- High-rate precise satellite orbit and clock corrections available in minutes with the TerraStar-NRT option
- Increased accuracy for pedestrian and vehicle applications by applying vehicle constraints using our SPAN intelligent vehicle dynamics modelling
- Ability to use L5, E5a, B3 in differential solutions
- 14 percent faster processing with 64-bit support
For applications requiring highly accurate post-mission position, velocity or attitude, post-processing maximizes the accuracy of the solution by processing previously stored GNSS and inertial measurement unit (IMU) data forward and reverse in time, and combining the results. The position, velocity and attitude solution can be smoothed and output at the required data rate and in the coordinate frame required. This process also provides the ability to assess the solution reliability and accuracy.
The GrafNav and Inertial Explorer software packages are available as a digitally secured machine-portable license. The products are also available as a perpetual license or as a time-limited term license. A Software Development Kit (SDK) is available to allow developers to customize the entire processing workflow to suit their customers or application.
The Waypoint process:
Step 1: Capture raw GNSS and IMU data.
Step 2: Waypoint post-processing software maximizes the accuracy of the solution by independently processing data forward and reverse in time and combining the results.
Step 3: The position, velocity and attitude solution is smoothed to deliver an unparalleled level of accuracy. In-depth quality analysis tools verify the quality of the trajectory.
Step 4: Export your results at the required data rate and in the coordinate frame required.
-
Making it safe for drones to fly over people
Changes to the Federal Aviation Administration (FAA) operational drone restriction were recently proposed in order to allow some flights over people. This proposed rulemaking appears to be a major step forward. Mail-order delivery flights, newsgathering, real-estate sales movies and building inspection, to name a few markets, all begin to make more sense, maybe even become viable.
Some night operations could also be possible.
Risk assessment methodology appears to be logical; a number of UAV categories are proposed, and there is a way to assess if operators are in compliance.
The Alliance for System Safety of UAS through Research Excellence (ASSURE) undertook a ground impact study to determine the possible risk of injury to people from drones falling out of the sky. Assessments were made using existing automotive standards and a military standard for debris impact, plus there was testing using automotive crash dummies.
It was a lot of work, but the bottom line appears to be that possible injuries to people are more likely to be minor than major. Bear in mind that UAS fly at relatively low altitude, are made with materials that make them somewhat elastic in nature, and that it may be possible for people in a crowd to see a flailing, falling UAV and move to avoid an impact.
Nevertheless, I do have a picture in my mind of a wayward drone crashing to the pavement after hitting a skyscraper in San Francisco, and I’m really glad I wasn’t down on the sidewalk below.

Urban building inspection using drones. (Photo:AeroSIM RC) Then I read an article by James Poss, a retired military major, who seems to suggest that although the conclusion of the ASSURE assessment was that 2,000 grams was an OK weight for an sUAV to avoid serious injury to anyone, the FAA appears to have proposed limitations for sUAS which are only 1/10th of this weight. This is more in line with the weights in the mil-spec standard that are based on small, fast, solid-metal blast fragments.
It might help us to also consider how often or badly people are injured by golf balls, baseballs, tennis balls or squash/racket balls — for instance, I’ve survived several golf ball impacts and even an impact with a squash racket during play without major damage. These are things we all take in our stride as part of (almost) normal human activity. I wonder how often recreational enthusiasts have actually been injured during model-aircraft flying gatherings?
FAA restricts flights over government facilities
In cooperation with the Department of Justice (DOJ) and the Department of Defense (DOD), the FAA has just established temporary restrictions on drone flights within 400 feet of the lateral boundaries of a number of sensitive federal facilities. This is in addition to previous restrictions over prisons, NGA facilities, DoD ships and other facilities.
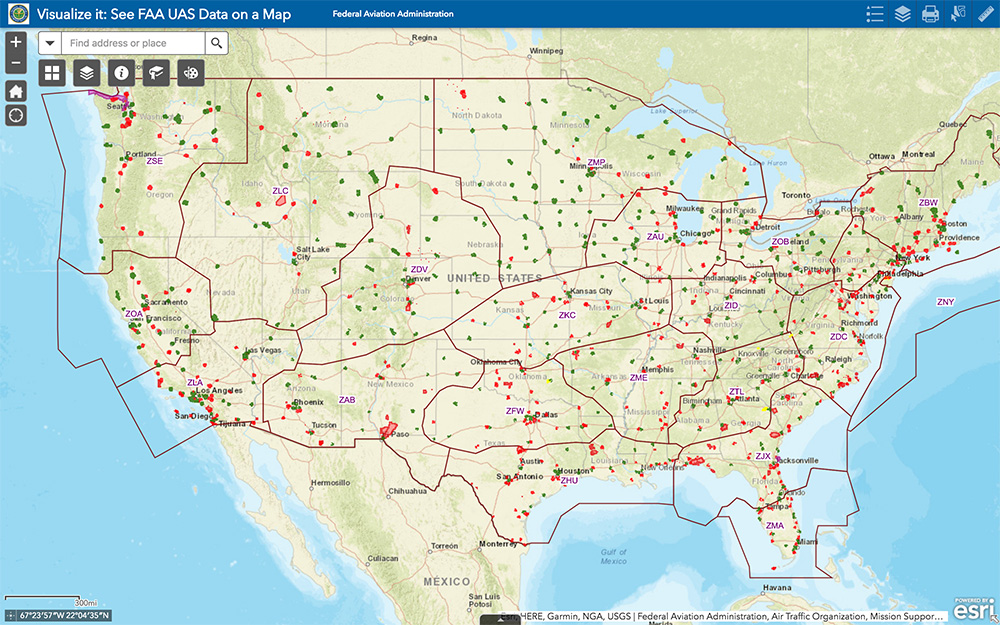
The most recent proposed Notice to Airmen (NOTAM) lists federal correctional facilities in almost half of the states in the U.S., several medical centers, U.S. Army facilities, ammunition plants and Pearl Harbor in Hawaii. It’s hard to understand why there aren’t already permanent UAV prohibitions over all such sensitive facilities across the whole U.S. I tried to check status, but the FAA UAS Data Display System didn’t list this proposed NOTAM which apparently goes into force on Feb. 26.
Think it’s probably a question of preventing bad guys from planning or doing harm rather than being shy to be caught on video — but, for sure, these places should be as secure as possible.
The FAA UAS data map shows all drone-restricted areas, once updated. (Screenshot: FAA) Security at the Super Bowl
Well the game wasn’t the most exciting, with New England doing all that was needed to win in the fourth quarter, but the security for the event in Atlanta was humongous.
The area around the stadium was cleared of threats even before the game, attendees were screened for prohibited items and the airspace within 30 miles was restricted for general aviation and drone access. There were even Defense Department F-16 airspace patrols, and the Customs and Border Patrol had a Black Hawk helicopter available to intercept any aircraft penetrating the exclusion zone.
Nevertheless, the FAA still approved the operation of two tethered drones. One was flown close to the stadium by security personnel to provide live images of crowd movements in and around the stadium. The second system was operated at 45 meters above the rooftop of the CNN building facing the Mercedes Benz Stadium. CNN used it to provide aerial imagery of the scene before and after the game.

Elistair base station and DJI M200 at Super Bowl. (Photo: Elistair) The tethered drone setup included two DJI M200 drones and two Elistair Ligh-T base stations, with monitoring, control and power provided to each drone by lightweight tethers. The security system was continuously operationed for 10 hours of captive flight during the Super Bowl, and for 14 hours total over two days — all while tethered to the Ligh-T control station. Security officials expressed their interest in using this solution more often because of the ability to follow a subject continuously without having to switch from one fixed camera to another, which risks losing the subject.
To sum up, new pending FAA regulations that support operations over people may have a few flaws. Other new FAA rules are aimed at protecting DOD and DOJ facilities from drone overflights, and tethered drones were used at the Super Bowl for crowd security and by CNN for color coverage.
New applications, new opportunities and preventive controls to maintain security at sensitive facilities — all moving in the right direction.
Tony Murfin
GNSS Aerospace -

UAV lidar gives maps a pop
Aspects and advantages to laser use
Why abandon well-worn mapping methods in current use?
It has to be for one or more forms of gain: time, money or staffpower. UAV-borne lidar can save a lot of field time, eliminate the need for site revisits, capture more data than previously possible, and provide a better product using more automated extraction tools.
Surveyors and other mappers must frequently develop a reliable surface model of an area about to undergo major construction. If it is new construction over native soil, then the area is often covered with vegetation ranging from short grass to very tall trees. By far the majority of these areas are surveyed using GPS, total stations, levels or some combination thereof, depending on the project. In any case, at least one trained individual, more often two or even three individuals, must walk the area collecting the necessary data with some form of survey equipment.
This is the tried-and-true methodology. It is easy to schedule, easy to estimate, and barring any field or office mistakes, absolutely reliable. Manually visiting a point in the field on return visits should yield similar, though not exact, results, at least within the tolerances of the equipment. It doesn’t matter if the temperatures are near freezing or over 100 degrees. It doesn’t matter if it is raining or sunny. It doesn’t matter if the grass is cut or if the leaves are on and in full glory. This is a very reliable method in all respects, assuming the proper tools and techniques are used.

Piloting a lidar-equipped drone. (Photo: Bailie McRae) How can this type of field survey be improved upon? First, is the product sufficient? Does the field crew reliably capture all the pertinent features? Did they get the location of the trees, buildings, poles and so on?
How many site visits are usually required to complete the average project?
What about the elevation data? Did they capture the drainage and breaklines sufficiently?
As always, the driving question is: Why change? Why abandon well-worn methods in current use?
It has to be for one or more forms of gain: time, money or manpower — which often equates to one or both of the first two terms.
When surveying with conventional equipment such as total stations, levels, and even GPS equipment, the likelihood of failure of a tried and true system is not very great. Comparatively, when using a UAV lidar system, not only are the stakes higher (as the equipment costs more), but the likelihood of an all-out failure is more likely and is definitely more devastating. There is no quick fix if your UAV crashes. It is more likely that the UAV will crash (usually due to operator error) than the lidar system itself will fail.
Facing these concerns, does one embrace a UAV lidar solution or hold to the tried and true?

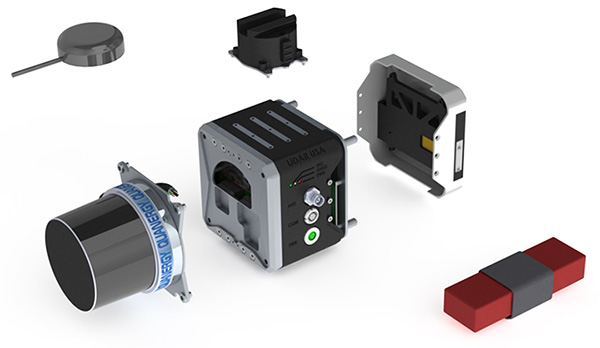
EQUIPMENT: Left to right, from top down: GPS antenna, laser head (Quanergy M8), detachable mount (car & UAV), computer and INS (GNSS receiver + IMU), interface plate, battery. (Photo: Lidar USA) If it is important to get a heavily wooded 40- to 100-acre job collected and delivered as a surface at 1-foot contour accuracy (or maybe even 0.5 foot) in a single day, then UAV lidar is the tool for the job. UAV lidar can save a lot of field time, eliminate the need for site revisits, capture more data than previously possible, and allow for a better product using more automated extraction tools.
Accuracy. Often the client wants a 3D point cloud, or digital elevation model (DEM), which is not necessarily derived from lidar. If the site has no vegetation present, then an image-based solution should be sufficient.
However, most sites are initially covered with vegetation. In that case, an image solution from some sort of aerial camera will only provide a surface on the top of the vegetation — not what the client wants. While lidar may not be perfect, it can get to within 0.1 to 0.2 feet of the ground surface, in spite of grass or trees. For most initial design surveys, this is all that is required.
Money. Cost is perhaps the topic of greatest persuasion against lidar and in favor of an image-only solution. A lidar system is more expensive than most camera systems, but again the camera system simply cannot collect viable ground data in vegetated areas.
Time. Another factor is the time required to become profitable with the system, and the longevity of the system. In a good economy, it doesn’t take many 40-acre topo jobs to completely pay for a UAV lidar system. Once more, it is about time.
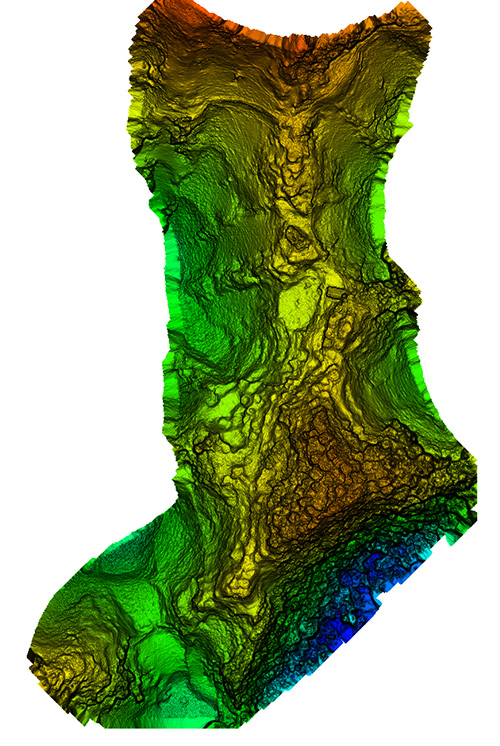
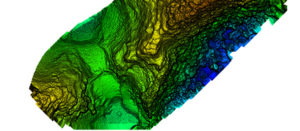
Broad overflight area of the cloud forest. (Image: Lidar USA) As to product longevity, any new UAV product released today should be just as functional in five years. You may have to upgrade your UAV, but the lidar system will still be good for the jobs we’re discussing.
Lidar collects XYZ and intensity. It does not collect RGB values. This is a strike against lidar. While lidar data can be colorized with imagery captured from a camera on the same system as the lidar, or separately, this is generally discounted as being imprecise (not well aligned). Lidar does not inherently or directly capture color. However, imagery is 2D in nature and does not capture XYZ data.
Imagery can align with the lidar nearly perfectly; it is a matter of a good boresight.
UAV photogrammetry, or image-only solutions are amazing. They provide a wealth of information. They are complementary to and synergistic with UAV lidar.
The advantages of including a UAV lidar solution along with a UAV photogrammetry solution include:
- the ability to measure at any time, day or night, in bright light or no light;
- rapid surface generation (not instant, but fast);
- flat surfaces, vertical walls, overhead structures — everything is collected without difficulty;
- power lines, guy wires and so on are all collected directly,
- bare-earth collection (multi-echoes and direct collection to ground, not just top of vegetation) is possible;
- generally a much wider collection width and fewer flight lines.
Further, lidar can often penetrate dust, fog and mists.
Sensors and Their Issues
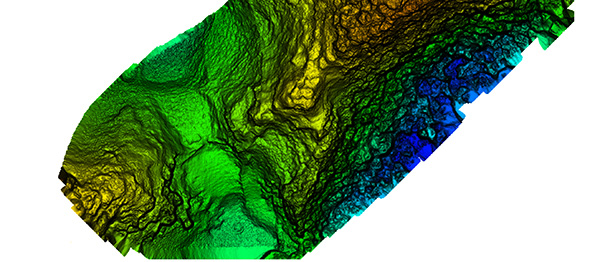
Bare earth classified surface of small site. (Image: Lidar USA) Lidar does require an inertial navigation system (INS) and all of the controlling software. This generally makes the system more expensive. It also makes it able to more rapidly generate the final product.
Inertial Use with Lidar. An INS combines a GNSS receiver with an inertial measurement unit (IMU) and a lot of software and specialized filtering algorithms. It is essentially the central nervous system of a lidar system. The GNSS receiver provides universal timing such that every instrument including the IMU, scanner, cameras and others are all precisely time-stamped. This is key to proper data fusion. The GNSS receiver also provides positioning. The IMU is essential for determining proper orientation (roll, pitch, heading) as well as positioning at an extremely high data rate (2000 Hz) between the recorded GNSS epochs. If a GNSS event is missed (which shouldn’t happen on a UAV) the IMU bridges the gap between epochs. Large gaps can lead to positional drift, but shouldn’t happen on a UAV.
The real-time software maintains satellite lock (coupling with the IMU as necessary), while the post-processing software, using a post-process kinematic (PPK) process, provides the best possible solution of the trajectory. It solves the trajectory forward, backward and over and over with different parameters until it reaches an optimum solution. So it’s not just the hardware that makes the system more expensive, it’s also the software.
Closer site inspection — notice non-natural occurring mounds. (Image: Lidar USA) Double Duty? There is some confusion as to the INS on a UAV. Can the INS used to navigate the drone be used for the lidar system as well, to save money? Yes, and no. Yes it can, with the proper integration — however, the INS to navigate the drone is usually far, far inferior to that required by a lidar system. So, No. Also, the lidar system really should be portable from the UAV to a car to maximize use. So the systems need to remain separate, for the most part.
Height and Width. Another UAV sensor issue concerning lidar is often very confusing. Some sensors are only good for 40- to 60-meter flying heights; some are useful to 200 or more meters. Depending upon where you work, this may be of no concern. In the U.S., we are limited to 120 meters above ground level (AGL) in any case. In most areas, being able to fly at 80 to 100 meters AGL is sufficient as long as accuracy and point density are not compromised.
Scan width varies a lot as well. The scan width of the shorter range systems is typically no more than 150 meters of usable area, whereas others can scan 500 meters wide. Consider that most surveys are 40 acres, maybe up to 100 acres, and we find that one flight is all that is necessary even with the least-expensive system. Do you need 500 meters wide? The answer depends upon your business model. If you are doing miles and miles of transmission corridor work, you probably need the greater width.
Ground Accuracy. What matters here is not so much positioning accuracy but point-cloud thickness. This can be difficult to understand and is a worthy subject by itself. The question is whether you can deliver the product you most often are required to deliver with the system. If you deliver 1-foot contour projects, can you achieve this with a 6-centimeter system or do you have to have a much more costly 1-centimeter system? Clearly the 1-centimeter system is much better, but what do you need to deliver?
Intensity is another concern. Most of the less expensive systems don’t do a very good job delivering a “b+w image-like” point cloud; that is, their intensity falls off dramatically with distance. Others do an amazing job. Is this important? Can it be overcome with colorization? If you were doing your work conventionally, would you be delivering an image-like surface? I doubt it. Certainly the intensity is nice to have and the information can be very useful in automated processing, but is it worth the price difference?
Ultimate Test: the Jungle
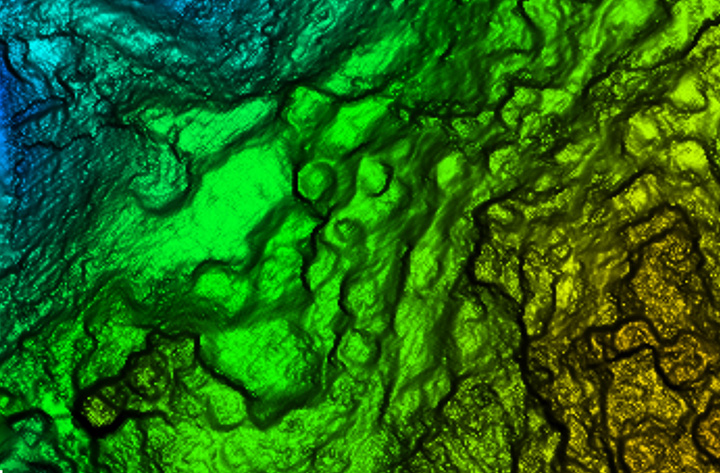
Recently we undertook an adventure with some explorers in South America, near the city of Jaen, Peru. A crew filming a new TV show for the Travel Channel sought to understand more about the ancient civilization of Chachapoyas, Warriors of the Clouds. Little is known about this race of people because they were conquered by the Incas in the 16th century and shortly thereafter by the Spanish conquistadores.
Our team was to help identify structures in an area called Leymebamba, about four hours’ drive from Jaen, hidden beneath the deep Amazon cloud forests — definitely not a typical North American forest. These forests are not only very dense with vegetation but with cloud cover that is generally at the level of the canopy.
Many centuries after the Chachapoyas have vanished, structural remains are concealed not only by the clouds and the canopy, but buried beneath several feet of dirt and a lot of living and long-since-dead organic matter. Only the most pronounced features can be found by the naked eye or a traditional survey.
Lidar brings a huge advantage in that it can get a much better approximation of the ground as well as any other hard surface such as walls, fences, trails, buildings and towers. By blanketing an area with dozens if not hundreds of points per square meter, post-processing software can “peel” the living vegetation away from the ground surface. This ground-classified data can then be analyzed by a trained scientist to determine if there are in fact any revelations to be had.
In our case, we were using an A-series high-definition lidar system, best flown at 40 to 60 meters and, in extremely dense vegetation, at 5 to 6 meters/second. Collecting 700,000 points per second enables us to potentially capture more than 400 points per square meter in a single pass. The area we were to scan varied considerably in terrain and had very little to offer that was flat and open. In fact, to get to the site, we had to pack several mountain horses with the UAV, several sets of batteries, and the scanner as they traveled down very steep terrain about 900 feet to the base of the hill to be scanned.
We’ve said we can scan from nearly anything moving, but we’ve never done it from a horse. Well, we weren’t actually scanning, but it was pretty close.

UAV and lidar, bound for the cloud forest. (Photo: Forrest Briggs) Finding a suitable take-off and landing area posed a challenge. Due to vegetation and terrain, only small areas could be scanned in a single flight, as the vehicle would quickly leave line-of-sight (LOS). While LOS may not be an issue legally in this area, it remains a real concern: we always want our equipment to come home at the end of the mission.
We learned something we hadn’t anticipated along this journey regarding weather. The day would start out around 80° F; around 2 p.m. it would rain, and the rest of the day would close out much cooler. Does this matter? Yes, if you are now wet and cold with several hours ahead of you. It seems there is always some new surprise.
As the area was remote, with no internet access, the existing map data for mission planning had to be downloaded prior to visiting the site. Each lidar mission was preceded by a scout flight using a small UAV to help ensure safety and appropriate flying height per flight line.
Situating the Base. Projects like this always pose dilemmas. Finding a good place for a GPS base station in a cloud forest is no small task. Normally we would put the base station on a known reference point so we can easily join the data with other projects. In this case we didn’t have any such concern. We simply needed an area with a clear view of the sky; usually this means no obstructions 12 degrees above the horizon. However, in a forest and in the mountains, you take what you can get. In our case, we found a rock outcropping and placed the unit on it with no tripod. It didn’t give us the best solution, but it worked.
Ideally we leave the base running for hours to get a good solution. Since we had multiple sites to scan, this wasn’t a problem. All sites were within walking distance of the base, so there was no concern about being too far away and adding more problems to the project. In PPK mode we can easily be 10 or 20 kilometers from the base with no concern.
Other Forest Challenges. In-field processing, far from internet or electrical supply, requires very judicious battery and especially laptop usage. The lack of many things we take for granted can quickly be a show-stopper if necessary (maybe even a phone call).
Even back at the hotel where power was available — don’t count on it. While the film crew and archeologists are eager to see results, everybody has to wait. No power.
Supposedly this is common and only lasts an hour. Three hours pass and everybody goes to bed but the lidar crew.
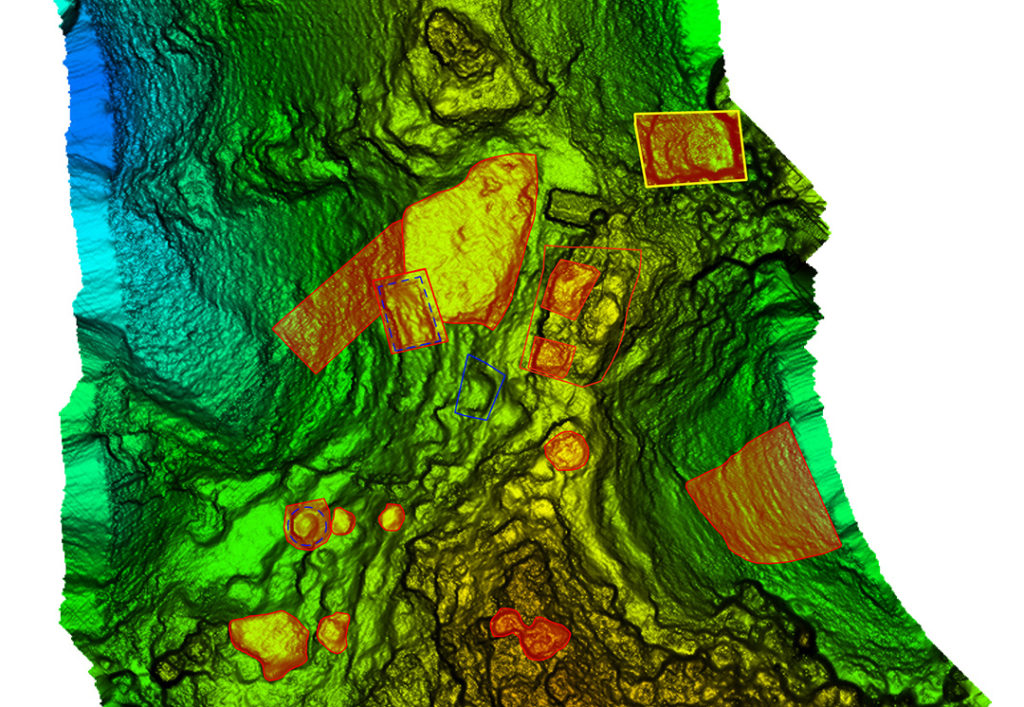
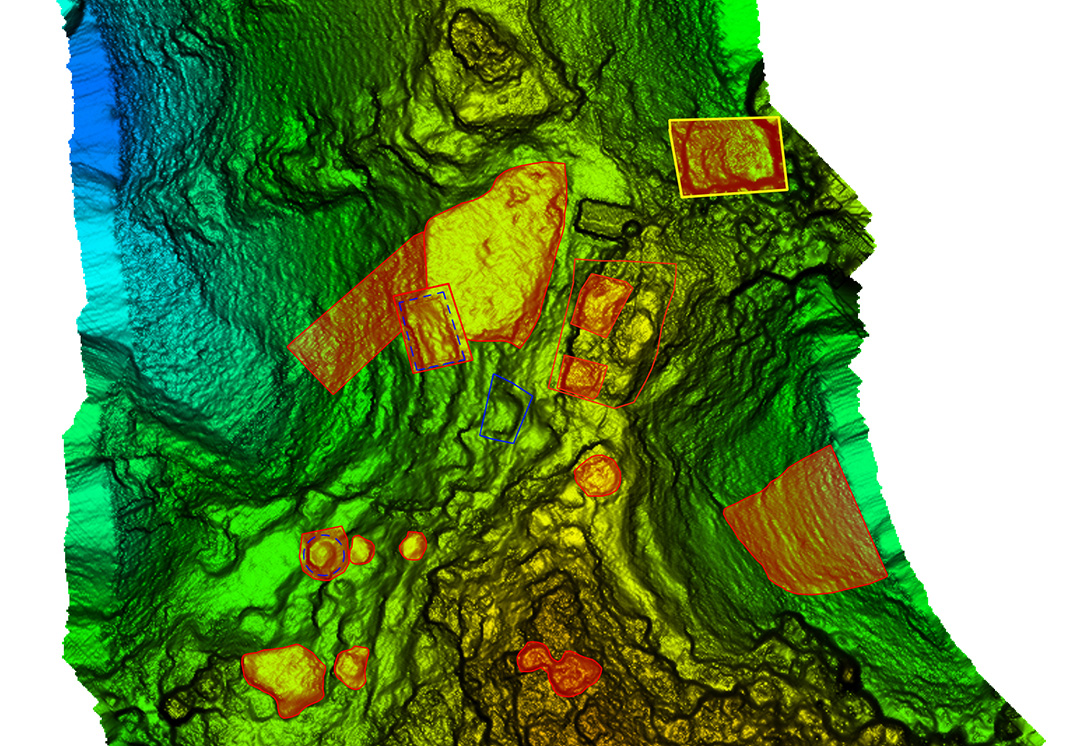
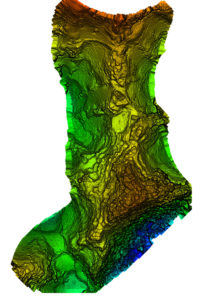
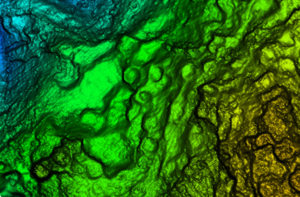
Areas of interest to archeologist — lots of them. (Image: Lidar USA) Finding the ground should be easy, but a new version of software has been installed. There’s a kink in our plans. Finally after some internet help (a call back home), the right settings are found and the software begins peeling away the vegetation to reveal the ground. The top of each hill (several were scanned) looked like a primitive fortress with 20 to 30 cylindrical structures clearly spread over the top of each site. On one site we identified a tower at least 3 meters in height.
While areas like this could be scanned with a conventional aerial system, collecting much larger areas, the UAV lidar solution offers several distinct advantages. One of these is just a quick recon of the area. Physically being on the ground at the site makes the team much more aware of what is going on. Secondly is the far, far greater density of points and the ability to collect much more off-nadir, allowing for more of the vertical structure to be captured.
In the end, our mission was successful. The UAVs were ported by horseback up and down precarious trails. The lidar worked great. None of the batteries failed. The drones didn’t crash. The archeologists were thrilled with the results, having found several new structures and a tower unknown to them. Once again, UAV lidar proved to be the best tool for the job. Indiana Jones out!
Manufacturers
As both INS sensors and lidar scanners continue to change, this allows us to make quite a variety of configurable systems. For this particular project, we used our Snoopy INS (OEM) with a Quanergy M8 Ultra scanner. The Snoopy INS uses a NovAtel OEM719 GNSS receiver to ensure best performance with GNSS collection. Other options for the INS include the NovAtel STIM300 (Sensonor IMU), VectorNav VN-300 and Trimble Applanix AP family. For scanners we support all Velodyne scanners including the latest AlphaPuck, Quanergy, Riegl and several more. Of course, for cameras there are the ever-popular FLIR, Sentera, PhaseOne and DJI. GPS base stations are not all equal, but most will work as long as they log at least L1/L2 GPS at 1Hz.
JEFF FAGERMAN is a a professional surveyor and certified photogrammetrist. He has a master’s degree in photogrammetry from Purdue University and worked as a photogrammetric software developer at Intergraph before starting Fagerman Technologies. Now known as Lidar USA, the company focuses on mobile lidar aboard UAVs.
Cover image by Bailie McRae.