A news story from Australia’s “Today Tonight Adelaide” television show highlights how the DroneShield system can bring down drones that enter restricted airspace or threaten safety. DroneShield countermeasures allow for the controlled management of drone payloads such as explosives, with no damage to common drone models or the surrounding environment.
Tag: UAVs
-
FAA surveys commercial drone operators
If you’ve registered a commercial drone, the U.S. Federal Aviation Administration (FAA) wants to hear from you.
On June 19, the FAA sent a questionnaire to everyone who has registered a commercial drone – more formally, an unmanned aircraft system (UAS) — for anything but recreational or hobby use.
Most of these owners fly their drones for commercial purposes, but the survey population also includes government departments and other users.
Hobbyists are not included in this survey.
The goal is to collect information on drone flight activities under the FAA’s small drone rule (Part 107), data that will help the FAA improve the services it delivers to the UAS community. Responses to the questionnaire are voluntary and entered 100 percent electronically.
The survey will take about 10 minutes to complete.
The questions include areas such as number of drones registered, number and types of missions completed in 2017, primary locations where the operator flies and types of waivers requested. The survey also asks how operators want to get information about drone-related issues from the FAA, and how satisfied they are with the news channels they use now
The questionnaire is completely anonymous, so responses cannot be attributed to an individual.
If the questionnaire is still sitting on your computer or mobile device, the FAA wants — and needs — your input.
-
Movement grows against killer robots
The miniature UAV, smaller than a human palm, zips right to its human target — identified through facial recognition technology — and pierces the forehead with a projectile, for an instant kill.
That harrowing scene takes place in a seven-minute viral video issued by autonomousweapons.org, a non-profit sounding warning bells over potential automation of weapons. Its Campaign to Stop Killer Robots (#BANKILLEROBOTS) seeks a preemptive international ban on “fully autonomous weapons which enable strikes to be carried out without human intervention.”
“Allowing machines to choose to kill humans will be devastating our security and freedom,” warns Stuart Russel, professor of computer science at the University of California at Berkeley, on the video.
What feels like science fiction to those of us raised on the Terminator franchise could be closer than we think. Because of this, a new U.S. Army report emphasizes the need to develop countermeasures against swarming drones and other unmanned weapons.
The Army and U.S. Department of Defense have invested significantly in technologies in response to these threats, often focusing on detecting radio frequency transmissions of the UAVs or their operators.
However, as the report points out, today’s consumer and customized UAS increasingly can operate without radio frequency command-and-control links by using automated target recognition and tracking, obstacle avoidance, and other capabilities enabled by software.
The U.S. Army discusses the pros and cons of autonomous weapons in a June 2017 article in Military Review, saying an international ban should be considered on “fully autonomous weapons with missions that cannot be aborted and that cannot be recalled once they are launched. If they malfunction and target civilian centers, there is no way to stop them.”
Sobering thoughts about a future that may not be too distant.
-

Launchpad: RTK receivers, autonomous driving modules
A roundup of recent products in the GNSS and inertial positioning industry from the April 2018 issue of GPS World magazine.
OEM
 GNSS RTK Board
GNSS RTK BoardFor OEMs, system integrators
The BX306Z GNSS real-time kinematic (RTK) board has powerful flexibility and compatibility to meet the needs of original equipment manufacturers (OEMs) and system integrators. The BX306Z is a cost-efficient board for positioning and raw measurement output. The board is a compact, multi-GNSS (GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2) RTK module with centimeter-level accurate positioning capability. It is able to integrate with autopilots and inertial navigation units. Log and command is compatible with major GNSS boards.
Tersus GNSS, www.tersus-gnss.com

The Taoglas Terrablast antenna line is designed for UAVs and transportation. (Photo: Taoglas) Rugged antennas
For automotive, drone markets
Terrablast polymer-based patch antennas are 30 percent lighter than their ceramic counterparts and extremely resistant to fracture upon impact. They are designed for the automotive and unmanned aerial vehicle (UAV) markets, where impacts are possible but antenna performance cannot be compromised. The 35-mm GPS/GLONASS/BeiDou patch antenna has high efficiency of more than 70 percent across all bands, improving time to first fix. All Terrablast antennas undergo rigorous temperature, vibration and impact tests, exceed ISO 16750 standards, and are manufactured in Taoglas’ purpose-built facilities in Taiwan and the United States.
Taoglas, www.taoglas.com
GPS/GAGAN receiver
Module designed for Indian market
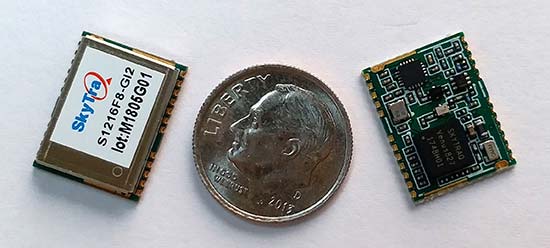
 The S1216F8-GI2 is a NavIC + GPS/GAGAN receiver module for emerging intelligent transport systems (ITS) applications requiring NavIC/GPS capability in India. It integrates an L1/L5 RF front-end and baseband processor capable of receiving up to 14 L5 NavIC signals and up to 20 L1 GPS/GAGAN signals simultaneously. With six NavIC signals and three GAGAN signals, it offers 18–23 usable signals, providing improved accuracy in urban canyons. The S1216F8-GI2 is form-factor and pin-out compatible with 12 x 16-millimeter modules, enabling drop-in replacement. NavIC sub-frame data outputs broadcast warning messages for weather alerts and natural disasters. The S1216F8-GI2 is manufactured with ISO/TS 16949 automotive certification.
The S1216F8-GI2 is a NavIC + GPS/GAGAN receiver module for emerging intelligent transport systems (ITS) applications requiring NavIC/GPS capability in India. It integrates an L1/L5 RF front-end and baseband processor capable of receiving up to 14 L5 NavIC signals and up to 20 L1 GPS/GAGAN signals simultaneously. With six NavIC signals and three GAGAN signals, it offers 18–23 usable signals, providing improved accuracy in urban canyons. The S1216F8-GI2 is form-factor and pin-out compatible with 12 x 16-millimeter modules, enabling drop-in replacement. NavIC sub-frame data outputs broadcast warning messages for weather alerts and natural disasters. The S1216F8-GI2 is manufactured with ISO/TS 16949 automotive certification.SkyTraq Technology, www.skytraq.com.tw
 Automotive module
Automotive moduleTo meet stringent requirements in harsh environments
The automotive-grade MAX‑M8Q‑01A GNSS module measures 9.7 x 10.1 x 2.5 millimeters and has an operating temperature range from –40° C to 105° C. It is designed to meet the stringent requirements of the automotive market, providing superior positioning accuracy even in challenging environments such as urban canyons. Its temperature range ensures reliable performance in harsh environments, such as when mounted in a car‑roof antenna.
u-blox, www.u-blox.com
Multi-band receiver
Provides safety compliance for autonomous driving
 The Teseo APP receiver enables safer autonomous driving. The multi-frequency GNSS receiver chipset is suitable for safety-critical automotive applications and high-accuracy positioning at the decimeter and centimeter levels for precise point positioning (PPP) and RTK applications. By tracking satellites of all GNSS constellations simultaneously on at least two of the frequencies used by each system, ST’s automotive-quality Teseo APP (automotive precise positioning) receiver provides high-quality raw GNSS data for PPP and RTK algorithms, which allows accurate positioning and rapid convergence time worldwide. The receiver monitors the integrity of the satellite data to alert the system if accuracy is degraded for any reason. This permits Tier-1 manufacturers to certify safety-critical systems in accordance with ISO 26262.
The Teseo APP receiver enables safer autonomous driving. The multi-frequency GNSS receiver chipset is suitable for safety-critical automotive applications and high-accuracy positioning at the decimeter and centimeter levels for precise point positioning (PPP) and RTK applications. By tracking satellites of all GNSS constellations simultaneously on at least two of the frequencies used by each system, ST’s automotive-quality Teseo APP (automotive precise positioning) receiver provides high-quality raw GNSS data for PPP and RTK algorithms, which allows accurate positioning and rapid convergence time worldwide. The receiver monitors the integrity of the satellite data to alert the system if accuracy is degraded for any reason. This permits Tier-1 manufacturers to certify safety-critical systems in accordance with ISO 26262.STMicroelectronics, www.st.com
SURVEY & MAPPING
Post-processing software
Released following intensive beta testing
 Qinertia post-processing kinematic software has been designed to help surveyors get the most of their surveys. After the mission, Qinertia gives access to offline real-time kinematic (RTK) up-to-date corrections from more than 7,000 base stations in 164 countries. By creating a virtual base station near a project, the software delivers the highest level of accuracy without having to set up a base station. An advanced tight coupling algorithm delivers high accuracy and maximizes RTK availability. Trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions, especially in challenging environments. With Qinertia, surveyors can quickly identify and solve issues such as mechanical installations or sensor alignment.
Qinertia post-processing kinematic software has been designed to help surveyors get the most of their surveys. After the mission, Qinertia gives access to offline real-time kinematic (RTK) up-to-date corrections from more than 7,000 base stations in 164 countries. By creating a virtual base station near a project, the software delivers the highest level of accuracy without having to set up a base station. An advanced tight coupling algorithm delivers high accuracy and maximizes RTK availability. Trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions, especially in challenging environments. With Qinertia, surveyors can quickly identify and solve issues such as mechanical installations or sensor alignment.SBG Systems, www.sbg-systems.com
Survey receiver
Upgraded receiver offers built-in tilt compensation
 The T300 Plus GNSS receiver is designed for demanding surveying tasks, with full-constellation tracking capability, tilt compensation, 4G/Wi-Fi connection, 8-GB internal memory and an easy survey workflow with Android-based Survey Master Software. It is designed to make collecting accurate data easy and fast, whether done by a beginner or experienced professional surveyor. As an upgrade of the T300, SinoGNSS T300 Plus combines a GNSS board, Bluetooth and adjustable TX&RX UHF, Wi-Fi and 4G modem into one rugged device. Its built-in 4G modem ensures the T300 Plus works with all kinds of continuously operating reference stations (CORS) worldwide. A built-in tilt sensor supports maximum 30° pole tilt and keeps the compensation accuracy within 3 centimeters; the user can check the electronic bubble on the controller for fast surveys in the field.
The T300 Plus GNSS receiver is designed for demanding surveying tasks, with full-constellation tracking capability, tilt compensation, 4G/Wi-Fi connection, 8-GB internal memory and an easy survey workflow with Android-based Survey Master Software. It is designed to make collecting accurate data easy and fast, whether done by a beginner or experienced professional surveyor. As an upgrade of the T300, SinoGNSS T300 Plus combines a GNSS board, Bluetooth and adjustable TX&RX UHF, Wi-Fi and 4G modem into one rugged device. Its built-in 4G modem ensures the T300 Plus works with all kinds of continuously operating reference stations (CORS) worldwide. A built-in tilt sensor supports maximum 30° pole tilt and keeps the compensation accuracy within 3 centimeters; the user can check the electronic bubble on the controller for fast surveys in the field.ComNav Technology, www.comnavtech.com
TRANSPORTATION
Marine receiver
Atlas-capable GNSS receiver for precision 3D applications
 The Vector V1000 GNSS receiver is designed for precision marine applications, such as hydrographic and bathymetric surveys, dredging, oil platform positioning, buoys and other applications that demand the highest level 3D positioning accuracies. It provides high-accuracy heading, position, pitch, roll and heave data. The V1000 supports multi-frequency GPS, GLONASS, BeiDou, Galileo, QZSS and IRNSS (with future firmware upgrade and activation) for simultaneous satellite tracking. The receiver is powered by Hemisphere’s Athena real-time kinematic (RTK) engine and is Atlas L-band capable. Based on Hemisphere’s Eclipse Vector technology, the V1000 uses the most accurate differential corrections including RTK and Atlas L-band. It has an integrated display that can be conveniently installed near the operator. The V1000 has heading accuracy of better than 0.01 degree when using a 10-meter antenna separation.
The Vector V1000 GNSS receiver is designed for precision marine applications, such as hydrographic and bathymetric surveys, dredging, oil platform positioning, buoys and other applications that demand the highest level 3D positioning accuracies. It provides high-accuracy heading, position, pitch, roll and heave data. The V1000 supports multi-frequency GPS, GLONASS, BeiDou, Galileo, QZSS and IRNSS (with future firmware upgrade and activation) for simultaneous satellite tracking. The receiver is powered by Hemisphere’s Athena real-time kinematic (RTK) engine and is Atlas L-band capable. Based on Hemisphere’s Eclipse Vector technology, the V1000 uses the most accurate differential corrections including RTK and Atlas L-band. It has an integrated display that can be conveniently installed near the operator. The V1000 has heading accuracy of better than 0.01 degree when using a 10-meter antenna separation.Hemisphere GNSS, hemispheregnss.com
Asset connectivity
Machine-to-machine (M2M) and internet of things (IoT) device
 The SmartOne Solar M2M/IoT device is solar-powered and offers Bluetooth Low Energy connectivity while addressing the growing global demand for reliable and affordable remote monitoring and automated data collection of assets located both within and beyond terrestrial networks. The SmartOne expands the market for remote connectivity to include assets that are otherwise difficult or expensive to reach for power replacement, and lowers the operating cost of monitoring assets being served by legacy SmartOne products. SmartOne Solar’s rechargeable batteries can deliver more than eight years of serviceable life. Without exposure to the sun, a fully charged unit can operate for many months while reporting twice daily. The product’s Bluetooth connectivity allows wireless device configuration and firmware upgrades in the field.
The SmartOne Solar M2M/IoT device is solar-powered and offers Bluetooth Low Energy connectivity while addressing the growing global demand for reliable and affordable remote monitoring and automated data collection of assets located both within and beyond terrestrial networks. The SmartOne expands the market for remote connectivity to include assets that are otherwise difficult or expensive to reach for power replacement, and lowers the operating cost of monitoring assets being served by legacy SmartOne products. SmartOne Solar’s rechargeable batteries can deliver more than eight years of serviceable life. Without exposure to the sun, a fully charged unit can operate for many months while reporting twice daily. The product’s Bluetooth connectivity allows wireless device configuration and firmware upgrades in the field.Globalstar, www.globalstar.com
UAV
PPK drone
Designed for large-scale surveying and mapping projects
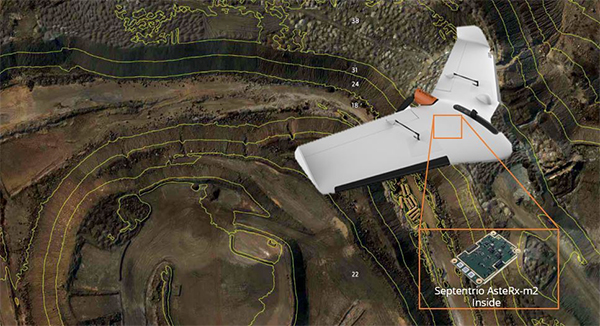
 The WingtraOne post-processed kinematic (PPK) drone is the result of collaboration with Pix4D and Septentrio. It is able to deliver orthomosaic maps and 3D models with an absolute accuracy down to 1 centimeter (cm), offering broad coverage and high resolution with ultra-precise accuracy. The WingtraOne can cover 130 hectares (320 acres), equivalent to 240 football fields, in a one-hour flight, and deliver maps at ground sample distances below 1 cm/pixel. Vertical take-off and landing (VTOL) offers hands-free operation and a smoother ride for onboard sensors as well as greater coverage than comparable multi-rotor UAVs. PPK computes ultra-precise geolocations for each image by combining the GNSS data with correction data from a nearby reference receiver. It offers a root-mean-square (RMS) error of 1.3-cm horizontally and 2.3-cm vertically without any ground control points.
The WingtraOne post-processed kinematic (PPK) drone is the result of collaboration with Pix4D and Septentrio. It is able to deliver orthomosaic maps and 3D models with an absolute accuracy down to 1 centimeter (cm), offering broad coverage and high resolution with ultra-precise accuracy. The WingtraOne can cover 130 hectares (320 acres), equivalent to 240 football fields, in a one-hour flight, and deliver maps at ground sample distances below 1 cm/pixel. Vertical take-off and landing (VTOL) offers hands-free operation and a smoother ride for onboard sensors as well as greater coverage than comparable multi-rotor UAVs. PPK computes ultra-precise geolocations for each image by combining the GNSS data with correction data from a nearby reference receiver. It offers a root-mean-square (RMS) error of 1.3-cm horizontally and 2.3-cm vertically without any ground control points.Wingtra, www.wingtra.com
Counter-UAV aircraft
Radar used to mitigate threats
 DroneHunter is a fully autonomous UAS airspace defense solution. The intelligent robotic aircraft is enabled with TrueView radar designed and engineered for physical remediation of intruder or threatening drones. DroneHunter is an autonomous UAS perimeter detection and protection solution designed to quickly detect, classify and secure against drones and other UAS. When an intruder drone is discovered, DroneHunter can engage autonomously via artificial intelligence (AI)-directed detection, tracking and guidance. Once the rogue drone is identified and the threat level analyzed, DroneHunter safely remediates the threat day or night, at a safe stand-off distance, with no collateral damage. DroneHunter supports multiple drone platforms based on use-case requirements.
DroneHunter is a fully autonomous UAS airspace defense solution. The intelligent robotic aircraft is enabled with TrueView radar designed and engineered for physical remediation of intruder or threatening drones. DroneHunter is an autonomous UAS perimeter detection and protection solution designed to quickly detect, classify and secure against drones and other UAS. When an intruder drone is discovered, DroneHunter can engage autonomously via artificial intelligence (AI)-directed detection, tracking and guidance. Once the rogue drone is identified and the threat level analyzed, DroneHunter safely remediates the threat day or night, at a safe stand-off distance, with no collateral damage. DroneHunter supports multiple drone platforms based on use-case requirements.Fortem Technologies, fortemtech.com
-
FAA expands drone airspace authorization program
The Federal Aviation Administration (FAA) is expanding tests of an automated system that will ultimately provide near real-time processing of airspace authorization requests for unmanned aircraft (UAS) operators nationwide.
FAA Acting Administrator Dan Elwell announced the expansion at the third annual UAS Symposium, which kicked off on March 6 in Baltimore.
 Under the FAA’s Part 107 small drone rule, operators must secure approval from the agency to operate in any airspace controlled by an air traffic facility. To facilitate those approvals, the agency deployed the prototype Low Altitude Authorization and Notification Capability (LAANC) at several air traffic facilities in November 2017 to evaluate the feasibility of a fully automated solution enabled by data sharing.
Under the FAA’s Part 107 small drone rule, operators must secure approval from the agency to operate in any airspace controlled by an air traffic facility. To facilitate those approvals, the agency deployed the prototype Low Altitude Authorization and Notification Capability (LAANC) at several air traffic facilities in November 2017 to evaluate the feasibility of a fully automated solution enabled by data sharing.Based on the prototype’s success, the agency will now conduct a nationwide beta test beginning April 30 that will deploy LAANC incrementally at nearly 300 air traffic facilities covering approximately 500 airports. The final deployment will begin on Sept. 13.
Drone operators using LAANC can receive near real-time airspace authorizations. This dramatically decreases the wait experienced using the manual authorization process and allows operators to quickly plan their flights. Air traffic controllers also can see where planned drone operations will take place.
Beginning April 16, the FAA also will consider agreements with additional entities to provide LAANC services. Currently, there are four providers — AirMap, Project Wing, Rockwell Collins and Skyward. Applications must be made by May 16.
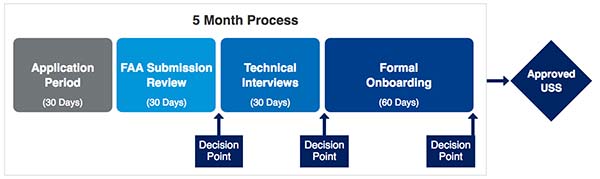
Interested parties can find information on the application process here. This is not a standard government acquisition; there is no Screening Information Request (SIR) or Request for Proposal (RFP) related to this effort.
LAANC uses airspace data provided through UAS facility maps. The maps show the maximum altitude around airports where the FAA may authorize operations under Part 107. LAANC gives drone operators the ability to interact with the maps and provide automatic notification and authorization requests to the FAA. It is an important step in developing the Unmanned Aircraft Systems Traffic Management System (UTM).
-
Spoofing in the Black Sea: What really happened?
We’ve heard a lot in the news recently about GPS spoofing, mostly centred on the story of ship spoofing in the Black Sea. Between June 22-24, a number of ships in the Black Sea reported anomalies with their GPS-derived position, and found themselves apparently located at an airport.
What happened is open to educated conjecture. In this column, I’ll briefly cover the history of spoofing, its basic techniques, some spoofing tests that we conducted, and then return to the infamous Black Sea incident.
As part of my day-to-day work in navigation warfare, I do a fair amount of work in defensive anti-spoofing. Naturally, in order to test anti-spoof technology, it is necessary to also perform spoofing. It’s a delicate subject and, as with any topic involving defense or national security or critical infrastructure, there’s a balance to strike between responsible disclosure, how much information is released into the public domain, and so on.
In this article, I will stick firmly to information available in the public domain, lest I be accused of proliferating the threat, but this still gives us enough material to tiptoe around the subject for the benefit of our readers. I could have included more details about the spoofing attacks, but was advised to hold some back — it makes governments nervous. You can read some of the background in an excellent article by Norwegian broadcaster NRK and a Resilient Navigation and Timing Foundation press release. Similar GPS anomalies still continue to occur at various locations.
Let’s start with basic spoofing background, and we’ll return to the Black Sea incident at the end of the article.
A brief history of spoofing
Spoofing isn’t a new threat — it’s been around for decades. But only in recent years has it received so much public attention. As with jamming and anti-jamming technology, and most other topics in the GPS domain, spoofing finds its roots back in the days of Cold War radar. In those times, it was often known as “deception jamming,” where you would transmit fake radar returns to paint an incorrect picture on your adversary’s radar screen.
When GPS came along, it was understood at the time that the C/A code would be vulnerable to spoofing. It’s an open code, so anyone is free to reproduce it. That is, after all, what a GPS simulator is: a GPS spoofer. We legitimately test our GPS receivers by fooling them with fake signals from a GPS simulator.
Of course, this is precisely why legacy GPS satellites also transmit the military P(Y)-code, and continue to do so. The P-code offers improved accuracy, and some other benefits, but more importantly, it is modulated with the W encryption sequence to give us the encrypted P(Y)-code. Ever since the anti-spoofing module was set to the “on” state, unless you have the key, you are unable to directly spoof the P(Y)-code. (You can still perform a meaconing attack, though, where you simply record the transmitted satellite signals and retransmit them again. Although this kind of attack can’t be used to impose a particular scenario on a GPS receiver, it might still cause havoc in unwary receivers).
So. in the early days it can be argued that the spoofing threat was solved. It wasn’t until GPS became ubiquitous in the commercial and civilian domain that spoofing really raised its head again. The fact that the vast majority of GPS receivers in the world relied solely on the unencrypted C/A code became a cause for concern — especially where those GPS receivers were essential to critical infrastructure.
The threat of GPS spoofing was discussed at many conferences and behind many closed doors and, although most people agreed that spoofing was a theoretical threat, some people argued that in reality it was “simply too hard” to conduct a realistic spoofing attack. And therefore we should not worry ourselves about it.
It wasn’t until a couple of high-profile demonstrations were carried out by the University of Texas Radionavigation Laboratory that spoofing became front-page news once again. In 2012, the lab staff carried out an exercise at White Sands Missile Range where a GPS-guided drone was spoofed from a distance. The drone was fooled into thinking its altitude was increasing, causing it to compensate by dropping straight down. Then in 2013, the same team demonstrated how an $80 million yacht could be steered off course by means of a spoofing attack.
These exercises publicly demonstrated that spoofing was indeed a real threat, and could be done. But many people still believed that it was very hard to build the complex equipment necessary to perform the attack, and thus spoofing was out of reach for most potential criminals or terrorists.
Fast forward another two or three years, to when a new mobile phone game appeared. Pokemon GO became the game craze of the moment, where players would travel around the country with their phones, getting points by collecting creatures in an augmented reality world. It didn’t take long for people to dream up new ways of earning points in the game, without having to go to the effort of traveling around the world.
What if you could make your phone think it was somewhere else, without ever having to leave your bedroom? And thus, bizarrely, it was a mobile phone game that brought GPS spoofing into the mainstream.
The rise of the low-cost software-defined radio (SDR) has enabled “spoofing for everyone.” Today, the tool of choice for the casual user is often the HackRF or bladeRF. Couple small SDRs that cost around $200 with open-source GPS simulation software, and you have a basic spoofer. Plenty of websites detail how to perform basic spoofing, and at hacker gatherings, people can present how they spoofed a drone. These may not be the most sophisticated setups, but it’s good enough to do the job in many cases. With a better setup, which I won’t describe here, it’s possible to achieve a much more realistic attack, which will fool even the most shrewd and wary GPS receivers.
Spoofing basics
Let’s take a quick look at what it means to spoof GPS. A receiver searches for a satellite over a two-dimensional surface to find a correlation peak, and it must examine a range of Doppler frequencies and code offsets. An example is shown in Figure 1. Once the receiver finds the peak, the satellite is acquired, and it will then track the satellite as it moves and can demodulate the navigation data message.
When a spoofer comes along, it tries to recreate this peak. By doing so, and usually with little more power than the real satellites, the receiver will begin to track the spoofed signal. Once the spoofed signal is being tracked, the spoofer can begin to manipulate reality by slowly modifying the properties of the signal.
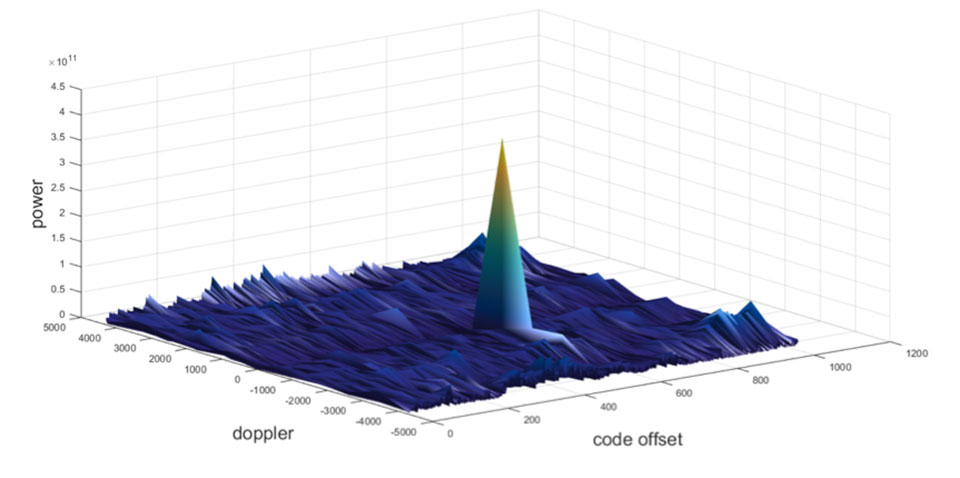
Figure 1. GPS correlation surface. (Image: Michael Jones) A poor spoofer doesn’t always align itself very well with reality, which essentially creates a second peak on the correlation surface. But a gullible receiver can still be fooled by this, and may lock on to false peaks.
The reality of spoofing and anti-spoofing
To understand the reality of spoofing and anti-spoofing, we carried out outdoor experiments at one of the Roke Manor trials areas (thanks go to my colleague Mike Wells for letting me use some of his results here).
In the first experiment (Figure 2), we spoof a commercially available mass-market receiver. The receiver is outside, reporting its correct location at Roke Manor. When we commence the spoofing attack, we are able to take control of the receiver. Once captured, we can then make the receiver appear to follow an arbitrary course. Here we make it wander off into the forest, spelling the word “roke” as it goes.

Figure 2. Spoofed GPS receiver appears to follow a course, whilst in reality being stationary. (Image: Michael Jones) In the next experiment (Figure 3), we place a conventional anti-jam antenna (a CRPA) on the receiver. What we observe, as you might expect, is that the basic CRPA offers no protection against the spoofing attack.
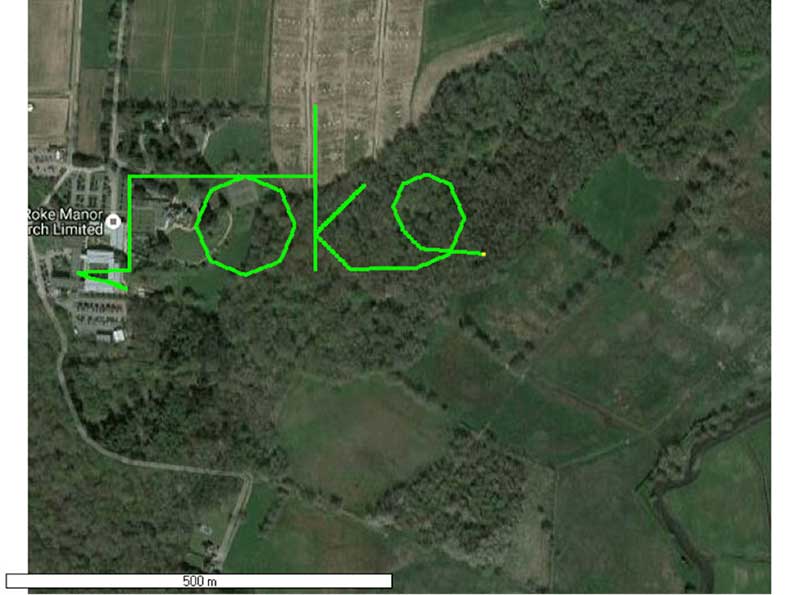
Figure 3. A GPS receiver is still successfully spoofed when protected by a conventional CRPA. (Image: Michael Jones) Now let’s make the experiment more interesting. We’ll move away from the basic commercial receiver, and replace it with a unit that contains not only a GPS receiver, but also a 3-axis accelerometer, 3-axis gyro, 3-axis magnetometer and a barometric sensor. An Extended Kalman Filter (EKF) performs an optimal fusion of the various sensors to yield the position solution.
The result, when we again try our spoofing attack, is shown in Figure 4. In short, the receiver is still successfully spoofed, despite the additional sensor inputs it offers.

Figure 4. A GPS receiver with integrated inertial sensors is still spoofed. (Image: Michael Jones) Before everyone gets too depressed by the ease at which GNSS, and even GNSS fused with other sensors, can be spoofed, there are answers to this problem. Some decent, modern GNSS receivers contain a whole host of algorithms for detecting and ignoring spoof signals. The issue is that many legacy receivers are still in the field, and these can be extremely vulnerable indeed.
Another option is to use a more advanced CRPA, which offers anti-spoof capabilities. These adaptive antennas are able to correlate on the spoof signals, and then remove them based on direction of arrival. So, in our final experiment here, we use our commercial mass-market receiver again, and protect it with an anti-spoofing CRPA.
The result is shown in Figure 5. You can see that the receiver is briefly spoofed, and starts to wander off course. When the anti-spoof is enabled and kicks in, the position quickly drifts back to the true location and stays there. Good job.

Figure 5. With an anti-spoof CRPA, the GPS receiver detects the spoofer and quickly returns to its true location. (Image: Michael Jones) Back to the Black Sea
Let’s finish by returning to the hot topic of the day. Did spoofing occur in the Black Sea back in June? Or was it a different form of interference? Could it have been a low-level jamming incident, causing the GPS receivers to report misleading information?
Without resorting to SIGINT (signals intelligence) data, and basing this discussion solely on public domain information and anecdotal evidence, I would say this was almost certainly a spoofing incident. A number of factors lead to this conclusion, and I’ll share some of them.
- Firstly, it didn’t happen to one ship – it happened to over 20 separate vessels. So it wasn’t a malfunctioning GPS unit; it was an external incident of some kind.
- Secondly, a large number of ships in the area reported identical or very close locations. This is a symptom of a large-scale spoofing attack. If it was a low-level jamming attack, then any misleading positions reported by vessels would typically have some randomness to them.
- Thirdly, ships reported that their positions would periodically “jump” from the true location to the incorrect location. Again, this is very typical behavior in some spoofing experiments: For various reasons, GPS receivers may temporarily lose lock on a spoof set of satellites, and then reacquire the real ones, and vice versa. This causes the characteristic random flipping between two well-defined locations.
If we accept that a GPS spoofing attack did occur, it brings us to the million-dollar question.
Who did the spoofing, and why?
What I’ll do here is a bit of a lightweight analysis exercise using public information and basic physics, and you can formulate your own conclusions.
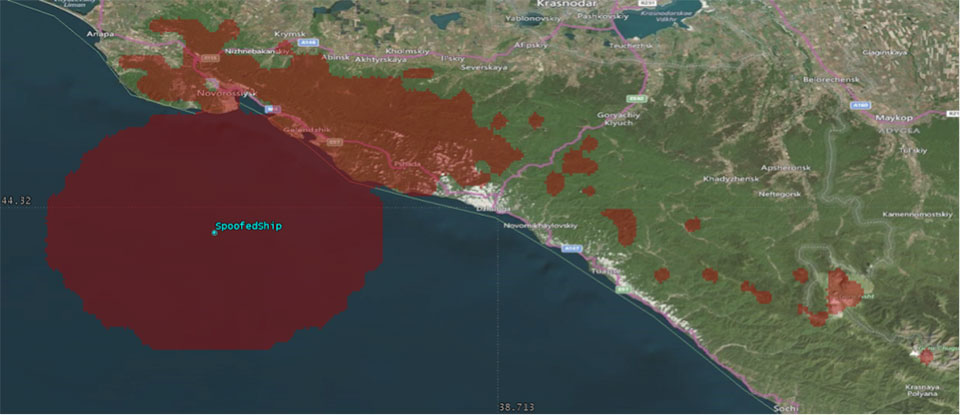
Let’s start by placing a ship, located in the Black Sea at 44°14.0’N 037°43.1E, which is the actual position of one of the reported spoofed vessels. For this example, I have placed a representative GPS antenna on the ship’s mast, with its antenna pattern shown.

Figure 6. Victim ship in the Black Sea, with GPS antenna pattern shown. (Image: Michael Jones) To get a rough handle on the scenario, consider the possible propagation of the spoofing signal. As a first-order approximation, let’s assume a standard 4/3 Earth refraction model, with obstruction by terrain. That’s a reasonable assumption at this frequency: Any obscuration by terrain will block the spoof signal. Let’s also initially assume that our GPS antenna on the ship is mounted 38 meters above sea level, and our spoofing equipment is mounted on a mast 20 meters aboveground. From this information, we can plot a map of possible spoofer locations for this particular incident (Figure 7).
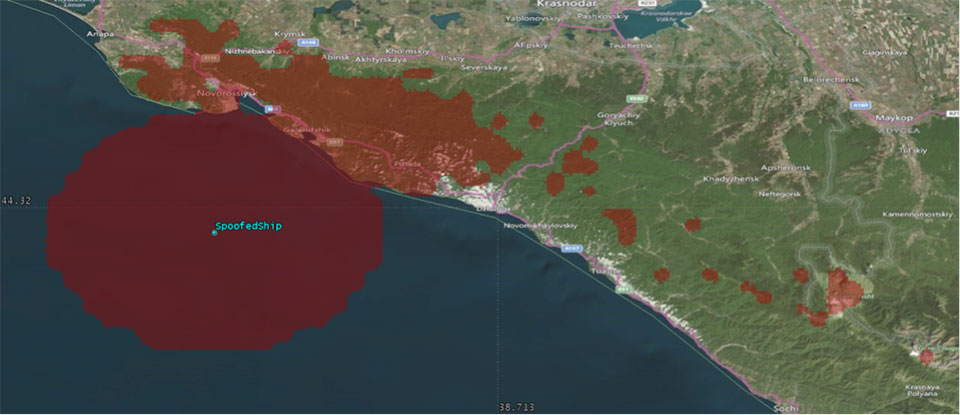
Figure 7. Possible spoofing source locations. (Image: Michael Jones) The first thing we might conclude from this is that the spoofing indeed originates from Russian territory, close to the Black Sea coast. To spoof the ship from further afield would require a much higher antenna, or even an airborne antenna. Which, of course, is possible, but then we would also expect vessels over a much wider area to report interference.
To me, it’s fairly conclusive that spoof GPS signals are being transmitted from this area, to make GPS receivers in the area think they are at an airport. The final question is: “Why would someone do this?” To answer this question, we must resort to educated speculation. Why would you want to spoof GPS receivers into thinking they are at an airport?
There’s one explanation that fits very nicely: drone defense. Many drones, especially those operated by casual users, have geofencing rules that prevent flights over airports and other restricted areas. So, if you were trying to perform aerial surveillance of the Russian border, your drone may suddenly think it was over an airport, and take action accordingly. The action taken depends, of course, on how the drone is programmed, but often includes “land immediately” or “return to launch point.” Certainly some of the drones we operate will immediately attempt to land if they find themselves in restricted airspace.
So if your drones are falling into the sea, you now have one idea why.
-
Intergeo preview: Photogrammetry heads for new markets
We’ve entered a new golden age for photogrammetry, powered by the ease of digitizing images and their ubiquitous availability.
Photogrammetry is the science of making measurements from photographs. While science drives the process, business is driving a wealth of associated applications.
“Photogrammetry is ahead of its time because everything is already fully digital in this discipline,” said Heinz-Jürgen Przybilla, professor of Geodesy at Bochum University of Applied Sciences.
UAVs, digital cameras and image sensors on the Internet of Things, in aircraft or on satellites are opening up applications that only the world of science was predicting a few years ago.
Intergeo Show. The developments that photogrammetry is setting in motion will be on display at Intergeo 2017, Sept. 26–28 in Berlin.
The art of using photographs for surveying, which laid the foundation for present-day photogrammetry, dates back 150 years and involves developing processes to derive information from images that go far beyond simply viewing them. In recent years, the discipline has made huge progress, with businesses discovering new application areas.
The high level of automation makes it possible to interpret huge volumes of data from sources such as large-scale satellite imagery. The process also works in real time — a prerequisite in applications such as autonomous navigation.
“Automation in image evaluation makes people incredibly flexible. We’re no longer restricted to viewing the world from our own height,” said Christian Heipke, president of the International Society for Photogrammetry and Remote Sensing (ISPRS).
Photogrammetry applications are moving into numerous sectors and tackling a host of challenges. Global change is being documented using images from space. Image data is being used to forecast crop sizes. Inaccessible structures are being monitored with the help of images from UAVs.
As Przybilla said, image evaluations from UAVs are already being used for high-precision land register surveys. What took days manually can now be accomplished in minutes.
Disaster Prevention. Other applications include disaster prevention and monitoring refugee movements. In many cases, drones provide a rapid overview, while satellites offer the large-scale basis for evaluating a situation.
In architecture, 3D models from aerial images complement computer-aided design (CAD) plans. In conjunction with virtual reality, 3D models enable design variants for a building to be depicted in the actual environment.
Information is also being shared with disciplines such as computer vision and robotics, with “seeing robots” increasingly recording and mapping their surroundings.

Industrial site in 3D: A digital elevation model from a series of overlapping photos taken from a UAV at 300 feet above ground level. (Image: Eric Gakstatter) More and more, the processes and algorithms on which image evaluations are based are becoming like a “black box” for users — hard to understand from the outside. While the black box is getting bigger, scientists are refining their methods.
“We’re increasingly combining existing data and this will leverage a huge amount of new potential,” explained Heipke. The black box for photogrammetry will be discussed at Intergeo.
Once the process of image content recognition is automated, applications are limitless.
Several sessions organized by the German Society for Photogrammetry, Remote Sensing and Geoinformation (DGPF) at Intergeo will be looking at topical issues in photogrammetry. The contents of the presentations range from new sensors and remote sensing to “engineering geodesy meets photogrammetry.” Numerous companies will also be showcasing their image-evaluation solutions at Intergeo’s specialist exhibition.
-
Israeli companies defeat drones with new technology
Drones have become a serious threat, able to penetrate airspace for surveillance or with an explosive payload.
The Islamic State has used weaponized drones against both Syrian and Iraqi forces; groups like Hezbollah and Hamas have sent drones into Israel and are said to be working on upgrading their UAVs for use in both intelligence gathering and offensive operations.
On April 27, Israel used a Patriot missile to take down a drone entering Israeli Airspace from Syria. At $3 million per missile, the Patriot system is an expensive way to down a device that may only be worth $200. Israel has also intercepted drones with fighter jets.
Systems developed by two Israeli companies provide less expensive — and quickly reactive — solutions.

The Drone Dome system uses Laser, RF and Radar. (Photo: Rafael) Drone Dome. Rafael Advanced Defense Systems Ltd. has developed a radar and laser-beam system for detecting and destroying drones, with the company adapting its existing laser systems to handle the threat.
Once the system’s radar identifies targets, its laser system destroys them.
Drone Dome also features a jamming system for disrupting communications between the drone and its operator. Drone Dome’s range reaches several miles, but causes minimal interruptions to other systems in nearby urban areas.
The standard Drone Dome system comprises a RADA RPS-42 S-band multi-mission hemispheric radar, a Controp MEOS electro-optical (EO)/infrared surveillance suite, a communications package, and the C-Guard RD jamming and NetSense Wideband detection sensor systems developed by Netline. The UAV threat is neutralized by activation of directional GPS/GNSS and radio-frequency inhibitor/jammer devices.
The RPS-42 is a four-panel tactical air surveillance system delivering 360-degree coverage in azimuth and 90 degrees in elevation, with a detection range of 30 kilometers — including the detection of a minimum target size of 0.002 meters square at a range of 3.2 kilometers — at altitudes from 30 to 30,000 feet. The RPS-42 is designed to detect, track and classify all classes of UAV.
DROM Defense. ORAD’s DROM Drone Defense System can detect an approaching drone at more than 3.5 kilometers away and take command, neutralizing it and landing it far from the operator.
With a weight of 38 kilograms, ORAD’s DROM system comes pre-engineered and pre-assembled. It is mobile and easily deployed on land or at sea in any weather conditions and has an effective coverage range of 3.5 kilometers. It has a 2-kilometer neutralization capability.
Once intercepted, the system can land a hostile a UAV in a pre-defined location, keeping any intelligence it gathered out of enemy hands. It can also identify the location of the operator.
The system’s RF detection unit analyzes signal channels and radio transmissions to spot drones. Once detected, an alarm alerts the system operator.
ORAD has sold the system to clients in several countries including Portugal, Spain and Thailand. The company is in talks with Israeli agencies interested in purchasing the system.
-

OriginGPS launches ultra-compact GNSS module
OriginGPS has released its new ORG 4500 series, which is a fully-integrated product that supports ultra-compact applications for both GPS and GLONASS.
The ORG 4500, kin to the ORG 4400 series introduced in 2016, addresses the increasing demand for high precision with the smallest possible footprint, and takes the company’s ultra-small form factor to a new level.

OriginGPS ORG 4500 is designed for ultra-compact IoT applications such as wearables, smartwatches, clothes and pet trackers, drones, connected cars, and health testing and tracking devices. “The newest GNSS product perfects the industry’s most comprehensive GNSS/GPS family of solutions,” said Haim Goldberger, CEO of OriginGPS. “Our modules readily resolve the industry’s acute pain points of unreliability and sensitivity in the commercial, engineering and defense sectors, enhancing the quality of experience and helping our customers remain competitive.”
OriginGPS offers a range of fully-integrated GNSS/GPS and antenna solutions, encompassing a wide gamut of standard and essential tools for navigation. The small form factor and high sensitivity of OriginGPS’s modules enable new business models, like “machine as a service,” and are suited for a variety of applications, such as wearables, like smart watches and pet tracking, as well as smart cities and drones.
OriginGPS modules are deployed around the globe in key sectors, such as transportation, civil engineering, precision agriculture and time reference.
Narrowband IOT platform. Ramping up the race to offer the best Narrowband IoT (NB-IoT) products, OriginGPS continues to expand its presence in the global navigation market with a steady stream of new IoT-enabled solutions, such as its recently released IoT platform (ORG 2100).
A key theme again at this year’s Mobile World Congress was the Internet of Things, with an additional focus on the challenges of ensuring interoperability of home and industrial applications. OriginGPS’s IoT Platform effectively removes usability challenges with a plethora of customizable sensors, such as temperature, pressure, accelerometer, light and humidity.
OriginGPS will showcase its range of mini + mighty GNSS/GPS modules at Embedded World 2017, Germany, March 14-17, hall 3, booth 121.
-

Agriculture robots market projected to reach US$5.7 billion by 2024
The agriculture robots market is projected to reach US$5.7 billion by 2024, according to a report by Transparency Market Research (TMR).
The diverse nature of the competitive landscape in the global agriculture robots market presents a number of prominent players for each of its key regions, TMR analysts said.
PrecisionHawk Inc., Clearpath Robotics and Harvest Automations Inc. were the leaders of the agriculture robots market in North America, while SenseFly SA and Naio Technologies led the market in Europe for 2015. At the time, Shibuya Seiki was the leading player in the agriculture robots market for Asia Pacific.
Also, a diverse array of names is appearing as emergent players in the global agriculture robots market within each region, denoting a strong scope of entry for advanced innovations and increased player competition.
Agriculture robots include UAVs, driverless tractors, automated harvesting machines and more.
According to the report, the global agriculture robots market was led by North America until 2015. It was considered to be the base for several of the stronger players in the market and the leading region in terms of technological development and rate of implementation.
In 2015, the global agriculture robots market was dominated by driverless tractors. This segment is likely to hold the leading share in the market in the immediate future, followed by automated harvesting machine. Driverless tractors are currently in very high demand due to factors such as their ability to automatically plough the field, and pick and place articles from one place to another at an extremely consistent rate.
By revenue, the global agriculture robots market is likely to reach US$1.01 billion by the end of 2016. Its revenue generation is expected to continue expanding at a CAGR of 24.1% within a forecast period from 2016 to 2024, and is expected to reach US$5.7 billion by the end of 2024.
Source TMR Analysis, 2016 Urban Migration Pushes Need for Agriculture Robots Globally
“The progress of regions and cultures has primarily driven a growing number of people towards the urban areas and the suburbs. The chance of industrial progress and growth in personal income are key factors attracting more and more people to the city life. This, in turn, has caused a twofold need for the incorporation of agriculture robots in several countries,” said a TMR analyst.
“Firstly, the growing global population — a lot of it being urban — is pressuring countries to increase food production while steadily reducing the hands available for the agriculture industry. Secondly, the overall land slotted for agriculture in nearly all countries is reducing, thanks to the burgeoning industrial sector and residential construction projects. This is creating an additional layer of demand for agriculture robots as they are as close as the industry can get to precision farming,” said the analyst.
Other factors driving the global agriculture robots market include the reduction in the use of chemicals through the efficient performance of jobs such as weeding, spraying, and pick-and-place, and the increasingly accepted modes of corporate farming.
Functionality Still Limited for Multiple Robotic Farming Aspects
It is currently not feasible to aim for constructing robots that are capable of performing multiple functions that constitute running a farm. Between crop management, irrigation, and even livestock rearing, the design of robotic programs and functions can be utterly difficult to accomplish.
This results in the requirement of multiple robot types in a single farm in order to completely automate the process, which is a serious financial burden to consider. The scope of utility in the global agriculture robots market is thus limiting the overall customer pool, which is already thinned out by the heavy investments required in installation and maintenance of single function robots.
“Future opportunities in the global agriculture robots market lie in the adoption of telematics sensors to reduce the complications that are caused by tractor failure and other functions, the use of crop sensors to increase the precision of pesticide use and gauge overall crop health, and the use of robotic farm swarms,” said the analyst.
The information presented in this review is based on a Transparency Market Research report, titled, “Agriculture Robots Market (Products — UAV, Driverless Tractors, Milking Robots and Automated Harvesting Machines; Applications — Field Farming, Dairy Management, Indoor Farming and Horticulture) — Global Industry Analysis, Size, Share, Growth, Trends and Forecast, 2016-2024.”
A PDF research brochure of this report is available.
-

DJI and DroneSAR launch rescue app for first responders
DJI, maker of unmanned aerial vehicles, and DroneSAR, an Irish tech start-up for search and rescue, on Thursday announced a new search and rescue app that seamlessly integrates a drone’s unique aerial perspective on life-and-death searches into incident management software, ensuring rescue crews can use drones effectively to save lives.
DroneSAR can stream live images and video, from a regular or thermal imaging camera, to an incident command center as well as other rescue teams on the ground. The software can tag the GPS coordinates of a victim and automatically transmit them by email or SMS, enabling ground crews to reach victims more quickly. Completed search patterns are all recorded and logged for easy handover to oncoming rescue crews.
 The app takes into account various types of terrain, allowing the drone to fly patterns to survey an area faster and more effectively. Flight paths can be adjusted for any terrain including hills, mountains, trees or flat land. The software allows users to choose an automatic aerial search pattern based on variables such as altitude, field of view, battery life and probability of detection. By organizing the process of data collection and providing a framework to manage and analyze it, DroneSAR ensures drones can be used methodically as part of a rescue protocol, allowing personnel to work more safely and effectively.
The app takes into account various types of terrain, allowing the drone to fly patterns to survey an area faster and more effectively. Flight paths can be adjusted for any terrain including hills, mountains, trees or flat land. The software allows users to choose an automatic aerial search pattern based on variables such as altitude, field of view, battery life and probability of detection. By organizing the process of data collection and providing a framework to manage and analyze it, DroneSAR ensures drones can be used methodically as part of a rescue protocol, allowing personnel to work more safely and effectively.“From understanding on how to use the technology, to communicating findings and data, to figuring out the most appropriate tactical approach, first responders can benefit greatly from this software app on our DJI hardware,” said Romeo Durscher, director of Education at DJI. “Many of the tasks and strategies deployed during a search and rescue operation can get sped up with automation, helping to reduce the time it takes to find a victim and save lives.”
The software was developed based on research done by DJI in conjunction with the European Emergency Number Association and Ireland’s Donegal Mountain Search and Rescue team. The groups found that while a five-person rescue team on foot needs an average of two hours to find a victim in one square kilometer, a drone can do the job in 20 minutes or less while taking additional active steps to achieve a successful rescue.
“Our aim is to save lives,” said Oisin McGrath, co-founder and CEO of DroneSAR. “Our software will reduce risk to search teams and reduce search time. If we can save just one life, that is mission success for us at DroneSAR.”
-
Trimble sells unmanned aircraft system business to Delair-Tech
Strategic alliances with Delair-Tech and Microdrones expand UAS platform options while leveraging Trimble software and data solutions.
Delair-Tech has acquired Trimble’s Belgium-based Gatewing unmanned aircraft system (UAS) engineering and manufacturing business.
Delair-Tech is a provider of long-range, fixed-wing UAS solutions for industrial inspection and asset management applications headquartered in Toulouse, France. Delair-Tech intends to grow the acquired business as part of its portfolio, according to a joint press release with Trimble. Financial terms were not disclosed.
“This transaction is part of our continuing program to tighten our corporate focus,” said Ron Bisio, vice president of Trimble’s Geospatial Division. “Trimble will remain actively engaged in the market by leveraging its brand-agnostic software technology for a broader range of UAS platforms.”
Gatewing has been reported as part of Trimble’s Engineering and Construction segment. The divestiture will not have a material impact on either overall or segment financial results.
Strategic Alliances Expand UAS Options. In addition, Trimble has entered into strategic alliances with Delair-Tech and Microdrones of Siegen, Germany. Microdrones is a provider of multi-rotor UAS solutions.
Under the agreements, Delair-Tech and Microdrones will become preferred providers of both fixed-wing and multi-rotor UAS solutions, with Trimble providing software, data processing and deliverables to UAS operators across multiple vertical markets.
“Trimble chose to partner with Delair-Tech and Microdrones to strengthen our UAS portfolio,” said Bisio. “Working together, Delair-Tech and Microdrones will deliver industry-leading UAS platforms and Trimble will focus on core software technology for UAS that integrates positioning, remote sensing and photogrammetry. The end goal is to deliver a complete solution to transform work processes and efficiency for our customers.”
“We are proud that Trimble selected us to be their fixed-wing UAS solution provider. With the addition of Gatewing to our portfolio, we can provide one of the most innovative and extensive portfolios of long-range, fixed-wing commercial UAS solutions to support Trimble and its distributors,” said Michael Delagarde, CEO of Delair-Tech. “The portfolio will continue to provide dedicated end-to-end solutions, from hardware to fully processed aerial data, which can then be turned into actionable business intelligence.”
“Microdrones complement the Delair-Tech fixed-wing lineup with one of the most resilient and stable Vertical Take-off and Landing (VTOL) aircraft on the market today. This provides a complete product line of tightly integrated solutions for mapping,” said Microdrone’s president, Vivien Heriard Dubreuil. “We’re excited to support Trimble distributors to enable a one-stop shop for UAS mapping solutions and to enable their global customers to produce exceptional results on every job.”