Paul Verhoef, the European Commission’s program manager for European Union (EU) satellite navigation programs — namely Galileo — discussed current issues at some length with GPS World, in a conversation on November 10. He addressed aspects of interoperability with GPS and prospects for further development in that area, the need for an ongoing political commitment by the EU to Galileo, the challenges of financing, the prospects for an 18-satellite constellation (which he dismisses as unrealistic), military considerations for both Galileo and GPS, and the recent uncertainty around Galileo’s Public Regulated Service.
Alan Cameron (AC): All four GNSS operators are or have been in discussions about interoperability, to varying levels. In my perception, the U.S.-E.U. agreement on GPS/Galileo interoperability appears to be the strongest, most defined, and most committed result of all these talks. Do you agree?
Paul Verhoef: I think that’s correct. We have I think seen in the process with the U.S. that first of all there has been a quite clear political commitment on both sides, at the highest levels, that interoperability was wanted. Secondly, in the implementation we’ve had a very good working relation with our U.S. colleagues in order to establish that. The advantage that I see is that we have been able at a very early stage to deliver on such an interoperability agreement, that this is clear to industry, it provides for predictability. It allows industry to monitor clearly how the two systems are evolving, and when this interoperability is actually going to be available in the marketplace, and it allows them to time their investments, their R&D, their production, and all the rest.
I’m extremely happy with that. We have moved on with U.S. colleagues to look at a whole range of other issues between the two systems, be it safety-of-life service, be it all sorts of other issues, and I think also because we jointly tie in our industries, we are transparent about the results, we provide papers, as we have recently done on SOL, we provide clarity to users worldwide. I think it is an excellent example of how this work can be done, and I’m extremely happy with it.
There is possibly still quite a lot of work ahead of us. I would say there is work forever. There are evolutions in the thinking on GPS, there are evolutions in the thinking on Galileo, we need to adapt to new situations jointly, but there is a clear endeavor between the two sides to progress with that. There are suggestions every now and then, also some of the areas we haven’t been looking into, we should look into more closely, particularly referring to our PRS service, and whether we should have some closer contacts with the U.S. on how we would, on what we do jointly on PRS and GPS use, etc. But comments made, there is quite a lot of work underway.
This doesn’t mean we aren’t doing anything with the other systems. We have with most of them very good relationships. Sometimes, like with the Russians, interoperability is a bit more complex because of the different technologies used, but the interest is there. We are with Japan pretty well advanced with the number of discussions; it is of course in a bit more limited context in relation to what the result would be for the services over Japan and the Asian region. With India, we are moving forward. As you know, with our Chinese colleagues the situation is a bit more complex. Although we have good discussions, I think there is still a bit of length to go before . . . . We come first of all with clear notions of compatibility, and interoperability is yet beyond that. So we need to take that in the order of priority, and the first priority is obviously compatibility.
AC: How does this commitment to interoperability balance with the lagging arrival of Galileo satellites, relative to the speed with which Compass is establishing a constellation? For market acceptance and worldwide use, is a well-defined and interoperative signal structure more important than a fully operating constellation?
Verhoef: That’s a good question. It’s not easy for me to predict how the markets will see that. If I judge by the way that our interoperability agreement with the U.S. has been received, one would tend to think that the market would be in favor of some predictability and some transparency in terms of the plans of the deployment schedule, and the standing, the solidity of the program in having a visibility, the capabilities of the technology, in having a timely interface specifications available, and all that sort of thing. We have done that, obviously there are currently a number of delays. My sense from what I hear from the marketplace is they are not too worried about that. They are really interested in being able to follow that.
Whether the strategy of playing for speed is going to work, I guess is still an open issue. In my view it is rather a dangerous and rather tricky situation, because there is not too much visibility on the Chinese program. It is only recently that they have started lifting a bit of the veil on it. I’m not sure from what I hear from the marketplace, whether they think they know what the system is going to do, they don’t know the specifications, they don’t know what the exact planning is. And obviously there is a bit of an issue hanging in the air there: that if compatibility and interoperability with that particular system is not in place, what is going to be the consequence?
Those agreements from China are not in place with us. It is not in place with the U.S., it is not in place with Russia, it is not in place as far as I can see it with Japan or with India. So the Chinese give a bit of an impression that they’re quite willing to go at this alone. Now I must say that over the last two years they have come into the fold of the international community a bit more, we have managed to convince them to discuss these issues with us not only bilaterally but also multi-laterally, at the providers’ forum which is taking place in the context of the International Committee on GNSS of the U.N. I think that they see that this is a good place to be. They have now offered to host a meeting of that committee in 2012, so the first indications are there that they are ready to be more of a world citizen, so to speak. But I think in order to find acceptance not only at the level of governments, but also at the level of markets, they’re going to really come forward with clarity on their intentions on compatibility and interoperability. As long as there is uncertainty about that, my sense is that the marketplace will be holding back and will want to see how this develops before they move on anything at all.
So it could be a rather risky strategy for the Chinese if they don’t seek to come to rather clear agreements with the other providers. And not only the first time, like now, but on a continuous basis. We all have evolving systems, we all want to come with the possibility of new ideas. I don’t think there is anybody really trying to stop the others, but we are going to have to work very hard to make sure our respective plans all can be granted without undue impacts on the others. This is a continuous process which is going to last, I guess, forever. We’re going to have to really work at that. We are continuing everything we can in order to progress with the colleagues in China. I’ve recently had meetings with them, a couple of weeks ago, in August, to try and really understand what their concerns are and be able to address those. We still have hope to be able to
come to a satisfactory conclusion.
AC: Other than financing, what are the most significant challenges for the Galileo programme today?
Verhoef: My sense, Alan, is that the most significant challenge for the programme is that we need to be able to give from the EU levels, at a political level, a political commitment to the system, which is solid. Meaning investments in receivers, in applications are done on the basis of a belief that the political commitment to the system, to supply the necessary minimum technical performance, that commitment is sufficiently solid, and sufficiently underpinned in order to have users worldwide say, Yes, we believe in this, and we think our own investment in this, even if it is sometimes a few thousand euros or sometimes hundreds of thousands or millions of euros is really warranted.
Of course this commitment is currently in place in the U.S., the U.S. government has been able over the years to provide a very credible goal commitment as to its performance with GPS. There are sometimes discussions on it, but by and large people do accept that the commitment of U.S. government is very credible. Obviously, we seek to establish a very similar level of credibility of commitment, because otherwise there would always be doubt as to, well, there is a problem now and what would you do in the future, and would they continue doing this, and would I finance that, and all the rest, and you would have continuous discussions, and it brings a large measure of uncertainty in the marketplace. Given the rather difficult financial times everybody goes through around the world, this is not a good way to proceed. We are really working very hard with all the political levels in Europe to try and get such a commitment to the table, and with it of course the underpinning for it.
The other challenge is, I think it is time that Galileo delivers something concrete. We’ve had many years of discussion behind us on whether the system will come, and if it will come, and how it will come, and what it will look like, and all the rest. I think that for my part, I’m very happy to see that in 2011, we plan to launch. The first four satellites are on the way; they are almost ready. About half the ground infrastructure is currently under implementation, we have every couple of months the opening of another ground station around the world. We had recently Kourou, New Caledonia, we will have next month the opening of the new ground station in Kiruna in northern Sweden. We have Oberpfafenhoffen in Germany open, we have Fucino in Italy open. With this, the system becomes a reality, and I think once the satellite launches will go across television screens in the whole world, people will see that the system is becoming a reality. And I think that is desperately needed in order to give it a sense that things are moving forward. I’m really looking forward to that. That is a piece of good progress we have achieved over the last couple of years.
AC: And now, would you like to say anything about financing?
Verhoef: Financing of any big programs, be it in the U.S. or Europe or any other part of the world, is always a challenge. Whether it is for civil programs, for military programs, for space programs, for terrestrial programs, no matter what, these sort of programs always have an issue with financing. Obviously, what we are trying to do at the moment is come to a financial engineering of the program, if you wish, in such a way that we can, from the program management point of view, take a commitment that we are normally not going over certain levels of financing, of budget use. I think this is possible to do. Obviously, then we will need our political levels, as I just said, to come to the commitment for this financing. We have at the moment in the world, but also in Europe, a particularly harsh financial crisis which means that many programs, be it in infrastructure provision, or in space, or in other areas, are under pressure.
We think that the situation with Galileo is rather solid, not only have we already invested a lot, but I think the return on investment is important. The fact that we need an independent system is clear to everybody. Just to give you some figures on that, at the moment, 6 to 7 percent of the European Union GDP is directly dependent on the availability of GPS. This is a GDP value of around 800 billion euros, this is more than 1,000 billion dollars. This is a figure where you say, well, you know, is it acceptable that we have this all dependent on a single system, and I think that the view of most is, No, this is silly, this is a risk we shouldn’t take. Therefore our own system is well worth putting in space. I think the cause for Galileo is fully accepted, and on that basis I don’t feel too concerned.
What is important is that we get a good grip on the cost of such a program. We’ve had to struggle with that a bit because we have found out — and this is known — we have found out that a number of our estimates a couple of years have been underestimated, particularly in the area of launches, which is much more expensive that we had anticipated. It is always difficult to do a good estimation for a program like this, because basically what you are buying is a machine that has not been made, at least in Europe, ever been made before. And because it is completely custom-made, it is not entirely clear during the estimates what are the costs that would be associated with it. But we are slowly coming to grips with that.
We now have a much better view of where our cost envelopes would be going, and I think this is important for the European ministries of finance. I think they are not necessarily too worried about the actual costs, as long as those costs have some form of stability in them. As soon as there is any uncertainty, of course, ministries of finance become very nervous, because then they are heading for very uncertain futures, and they don’t know how to handle any possible program reserves, and all the rest of it. That is of course a very difficult situation for them. But I think these times are now almost over, we now know, after we have the majority of the initial procurements behind us, we know pretty well what the system is going to cost, and that is a good basis to proceed.
AC: Regarding the launches in particular, I’ve seen a proposal recently to move the launches away from Ariane and to Russia. Is this politically feasible?
Verhoef: This is obviously politically very complex, in the sense that there are a couple of elements. The number one element, we have in Europe an access to space policy with a clear strategy to make sure we have our own abilities to launch. This access to space policy is built on a philosophy that we need to have our own capacity, meaning that Ariane Espace is also used for commercial purposes, but it is particularly used for governmental launches. There is obviously a price tag attached to that, and I think that is then to be seen how we handle that.
The second thing is maybe a very formal issue, but in the end I think is very important. We have taken in the WTO a commitment that others could launch governmental satellites for us, but only the basis of reciprocity, meaning that we are willing to open our markets of governmental launches for launch providers from other regions of the world, but only if they open up their own governmental markets. This until now has not happened. So, if we would give access to either Russian or U.S. launchers, to take two of a number of theoretical possibilities, it would be difficult to see that we would see competition to our own launch system, without our own launch system having access to the governmental markets in the U.S. and in Russia. I think this is a basic political fact of life, and I don’t see quite easily that this position is going to be changed.
I know there has been an expressed interest, both from a couple of Russian quarters, also from U.S. quarters, and I have been very clear to them. At the moment that the two respective governments that I mentioned open up their governmental launch market for the European launch systems to compete in, then I can accept offers from them in any bidding phases that we have. This is an issue, one can say, well you are running over cost, maybe you should go out nevertheless. This is an easy way out, but on the one hand, it would completely undermine our WTO commitment and our policy in this, so I cannot see at the political level that there is going to be a change in this. We’re going to have to see how this proceeds. There is obviously a discussion on it, because one can now see what some of the price implications possibly would be, but this is where we are. I’m not too worried about that.
It is true that we receive the launch providers, they have their ideas, they have their suggestions they offer to us. I have been careful in making sure to them they understood the context in which they do this, and I think they know what the situation is. Obviously they still try because maybe they would be able to provoke a change at the political level, but for the moment I very much doubt that that would be the case.
AC: Going back to the figures of GDP percentage dependent on GNSS, if these could be published, and if the U.S. could supply the corresponding figures for the U.S. economy, and even Russia and China, this would be of mutual benefit, to furthering all GNSSs everywhere.
Verhoef: These are indeed as you mentioned very important notions and they need to be well understood. This is where I see that the cooperation with us and the U.S. government is so good, because we have realized, on both sides, exactly that. We are very happy that there is a GPS system in certain ways complementary to ours, and in other ways a backup to us, and vice versa. You see it in the recent statement of the Obama administration, where they say they would want to extend their discussions with third countries to look at how these systems work together. My sense from what I hear is that this goes well beyond compatibility and interoperability. If we together provide a real important piece of infrastructure to the world, we need to be aware of the responsibility we carry with that.
AC: When you say it goes beyond compatibility and interoperability, what would you call it?
Verhoef: There have been certain very informal suggestions already over the last couple of years from the U.S. as to whether we think it would be possible at some moment in the future to optimize operations between the two systems. For example, look at maintenance and outages jointly, so there is the least impact on the user community. To see whether certain optimizations would be possible between the two systems which would help that. Maybe to even go so far as looking into what sort of backup we could play to each other, etc., etc. I can well see for example that we have a need to have access to a large amount of territories around the world for our ground segment. So does the U.S., and I hear that this discussion is coming to the fore once more. Well, we can help each other with that. The European countries have access to quite a bit of territories around the world, the U.S. has as well, and there are other territories. Maybe we can co-locate a number of facilities with some joint security and all the rest of it.
One can imagine a whole lot of things where we say, well, you know, we are helping each other to make sure that in terms of operations and overall service provision, that we have a common strategy. This doesn’t mean we are going to be fully dependent on each other. It is more the reverse. Use the respective independencies to the maximum, but by having the common strategy, optimize the full use of those infrastructures so there are the least impact on users if there are issues.
AC: I’ve heard that kind of suggestion of optimization between the two systems from Brad Parkinson. Have you heard them from some kind of official entity, a negotiating body of the U.S. government?
Verhoef: I have personally been approached at a very high level in the U.S. government about this, but very, very, very informally. As to whether we would think that, not immediately but in the future, and these would be possibilities, and would we be interested to discuss that, and all the rest. Now, for the moment, it hasn’t come to much, because we have so much else to look at which is much more urgent. But the notion that this is maybe useful in the longer term is clear. Let’s face it, the current work that we are currently doing with the U.S. colleagues on defining safety of life service, which has a single standard across the two systems and which is then respectively implemented and supported, and being a future backbone for the aviation sector, is one of these things.
If one goes further, there have been indeed also by people more on the ground, there have been suggestions, maybe we could learn from each other. I recall a visit to the GPS Wing where the colleagues there were enthusiastic, saying we have learned all sorts of good things, and maybe you want to profit from that: you get certain experiences in the future from which we would like to learn. We should keep an open mind to see that we on both sides have some channels on that, etc., etc.
This is not to say — on the contrary — that we have received formal letters with requests for all this to be put on paper and negotiated. That is not the point. I think on both sides there is awareness that these are potentials that one moment we may want to develop.
AC: You mentioned earlier the words “commitment to a minimum necessary technical performance.” Is that 18 satellites, is that 24?
Verhoef: There are a number of factors in that. The first is, I think we need to be looking at where the users are going. The users are clearly asking for high figures in terms of availability, and in terms of accuracy. Those sort of demands, which I would only expect to increase over time, I would hardly expect to see that in this particular technological world, users are going to say, no, no, we can do with less availability and less accuracy — I just don’t believe it, I don’t think that is the normal trend where you go with technology. My sense is there is always going to be pressure from users for those, which translates certainly into more satellites. At the very simplest level, it militates in favor of more satellites. This is the first element.
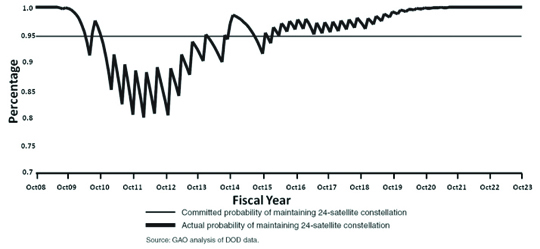
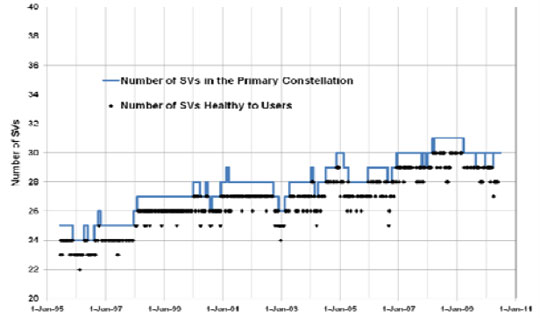
The second element is I see, the discussion in the U.S. where there is a commitment of the U.S. government to provide 24 satellites, and as we saw at the ION conference once more serious discussions as to whether, with over 30 satellites in orbit, how comfortable the U.S. is positioned in providing that minimum technical performance. I think one has to come to the conclusion that this is to be looked at with some care. The question is, indeed, is 24 enough, or should we go to a higher minimum in order to look at that. Or should we adjust the spare strategy in order to have a much larger margin on that. Which effectively means that you also have more satellites in orbit, presumably.
There are obviously, there is a discussion in Europe, because the 30-satellite constellation that we had defined was in part dictated by a very high-performance safety-of-life service that we had foreseen. Now that we have come to the conclusion that that particular safety-of-life service, whic
h at that time was foreseen to be much more proprietary, to give a PPP consortium a chance of better revenues — now that we have come to the conclusion that that is no longer necessary, and no longer desired by the marketplace, because the marketplace is very clearly saying, sorry guys, we are much more interested in you having an agreed standard with GPS and implementing that. There is obviously a review needed to see whether the 30-satellite constellation we had foreseen is what we’re going to do.
There is another element. If I look for the moment at the performance charts and statistics which are put in front of me by the European Space Agency and a few other space agencies in Europe, it is clear that it is probably more satellites that are necessary rather than less. There is a bit of a discussion for some reason in Europe, for some reason some people seem to think that we could do a way with 18 satellites. Well, from me you will hear a solid No.
The availability figures for an 18-satellite constellation are around 90 percent on average, which means that for an aggregate total of some six weeks a year you would not receive sufficient views, not have sufficient satellites in sight to actually determine a position. There are going to be sectors like aviation where this is completely unacceptable, and they would never invest in anything if that is what we’re going to do. So my sense is that we will always have a lot of upward pressure in terms of constellation size. Of course it needs to be offset against costs and other considerations, but I think the pressure is always going to be there. It is very premature for people to be trying to take a shortcut, to think, well, maybe we could do with less. Because in the end you would have a constellation with a technical performance which the marketplace is not interested in, and then you would have a real problem.
AC: What about factors other than the marketplace? European governments and European militaries, what is their thinking about the PRS, and about having to work with an 18-satellite constellation, either for incomplete, as you say 90 percent availability, or perhaps a reconfigured constellation that gives continuous coverage over Europe but not over the rest of the world?
Paul Verhoef: The latter, I have not heard of. Presumably if Europe, there is an interest in using satellite navigation for strategic defense capabilities as you mention, my impression is that that is only in part an interest in Europe, but that is particularly of interest outside Europe, so I think you would still look at a sort of near-worldwide requirement.
Let me say it in different words. Everything that I have heard is that our governments are interested in a fully fledged PRS service which is accessible from around the world, which is uninterrupted, and which has the highest grades of security. All of that means 18 satellites is just not going to do it, and we need more. There is then a question, coming back to the discussion on interoperability, what is it GPS and Galileo could do together? I think that it’s early days, the discussion is not really fully on the table yet. There are a number who show an interest in possibly discussing this. We will see whether this comes to a discussion and how we would do that.
My presumption is, nevertheless, even if this would be done there is on both sides of the Atlantic an interest in having a basic level of autonomy and independence, even if there is a possible combined use, and it means that under the basic conditions of autonomy and independence, that you are fully capable of using that services for governmental purposes. From that perspective, we’re going to need a fully-fledged constellation.
So I think the discussion on the constellation size is particularly introduced by those who consider that the system is maybe expensive, and one can cut costs and thereby reducing the size of the constellation is an element of cutting costs. Which obviously, in theory is true. But I think that no matter what the size of the constellation, you’ll always have a basic level of costs, of operations which is linked to manpower and basic ground installations which is going to be necessary. The procurement of a number of satellites more or less, I don’t think is going to be making that much of a difference in the overall picture.
AC: In all European discussions, the military seems to take a very quiet and very backrow seat, if even perceived to be in the room at all. This is very different in the U.S., where the GPS is financed, largely, out of the military budget and obviously administered by the military. What influence on your activities and the Galileo program does the military in Europe play, and secondly, if there was a budget shortfall, can military funds be accessed to help get Galileo going?
Verhoef: It’s a bit of a theoretical question. You know, the EU budget is made available by our 27 member states, and we get money from them. There is no tag on that money which says, “this part is coming from agriculture and this part is coming from military and this part is coming from transport, and therefore it has to be used for that.” We get a certain sum of money and on the basis of that, on the total, there is then a discussion on for what purposes it is used. So the question in Europe is not so much where it comes from, but what it is being used for.
On the national level, of course, it is a bit different, because there you have a defense ministry or a transport ministry, buying with its budget a certain thing. Well in this case, it is the European Commission buying, on behalf of the EU, on the basis of a general budget which is made available.
But let’s come back to the military. There is at the moment, number one, there is a discussion ongoing in the Council, on the basis of a proposal which we have recently made in the Parliament on the access rules to the PRS service. That means, what are the agreed rules that the member states would like to establish, who is having access, under what conditions, to PRS? It is a fully controlled service with only government-authorized users. It is clear there is an enormous amount of use foreseen , including in the defense area. I think there is a very broad level of agreement in the EU, that the normal use in terms of logistics etc. etc. of the defense establishment should be completely possible. There seems to be an increasing majority of member states that is keen to see that the PRS is made available for certain peacekeeping missions and other things. You know this is defense/military use, but in the particular context.
What is still not being discussed is would Galileo be used for purely military purposes? Let’s put a word to it, for missile delivery, or not? This is where I think the discussion is not there. There are no doubt member states that have a view on that. I think everybody is aware of the sensitivity of that particular discussion. It is not something that the Commission gets involved in, because this is an issue would need to be decided by the member states and the European Parliament. Everybody knows that there are differences of views on this.
But with that sector excluded for the moment, this means that there is a large sector of agreement for civil protection purposes, for overall logistics purposes, for peacekeeping purposes, and all sorts of other purposes — PRS should be used. There are as a result in many of our member states, very advanced works taking place on shaping this up, on finance preparations at the national level, to put authorities in place at the national level who control this use. They will in turn interact with the system in order to organize the distribution of encryption keys and all the rest. There are going to be common minimum standards which are going to be developed. In a whole lot of ministries there are groups looking at how this technology is going to be used, under what circumstances industry can be licensed to build the receivers necessary for it, how they would use it in their respective operations, etc., etc.
So what you see in addition to the expenditure at the EU level for the system itself, and for the security of the system itself, there is quite a large investment in member states to prepare themselves for the use of PRS. It is true that in some countries, the military se this as an opportunity to have much more direct involvement in advanced satellite navigation technology, which with GPS is always under license form the U.S. DoD, which has a lot of strings attached. In this case too there will be strings attached, but they will be strings which we attach ourselves to it.
One also has to say that the use of GPS for military purposes in Europe, between member states is not equal. Not all our member states have access to military GPS, which means that for example if we would have joint peacekeeping missions from EU member states, and we would do that on the basis of GPS, that a number of member states would not be able to involve themselves in that, if that is a core technology which needs to be used, because they don’t have access to it. So this is another reason why there is an increased interest to see what we would do with the situation and how it would evolve.
My sense is that this is an area where there is a lot of discussion. There is a lot of effort being put into it. PRS service is clearly one of the key services that the system is going to deliver. Our governments are by and large very upbeat about using it, they are preparing for it, and this is a good issue.
AC: In September, you participated in GPS World’s Grand Game of GNSS, playing for the purpose of the game the role of a member of the U.S. Industry group. Any lessons learned, perspectives gained?
Verhoef: First of all, Alan, it was a fantastic game. I want to congratulate you personally for having put this into the very enjoyable evening, it was certainly part of a lot of fun. It was fun to play U.S. industry, and my colleague from the State Department playing a European operator, a funny situation.
What I learned from this, if you slip into these roles, basically everybody has similar roles across the world, industry, governments, same roles. One can easily understand — whether I did learn anything particular from it, I did learn that one can have a lot of fun together.