By James R. Clynch, Andrrew A. Parker, Richard W. Adler, and Wilbur R. Vincent, Naval Postgraduate School; Paul McGill and George Badger, Monterey Bay Aquarium Research Institute
“Mr. Holmes, they were the footprints of a giant hound!”
Engineers-turned-sleuths in Moss Landing Harbor, California, had a similar clue to go on: the tracks of a GPS jammer across a spectrum analyzer. For months, the elusive culprit had jammed GPS signals in the harbor. The team of engineers roamed the waterfront with a spectrum analyzer and receiver. They identified and apprehended not one, but two distinct suspects, and unearthed evidence of the existence of a third — all readily available, commercial-grade television antennas.
After interrogation in the laboratory, tahe guilty devices were turned over to the authorities for appropriate action.

In April 2001, the captain of the research vessel PT SUR, based in Moss Landing, California, made a radio telephone call from at-sea to one of the authors, stating that signal reception of GPS in the whole of Moss Landing Harbor was jammed. He was advised to contact the U.S. Coast Guard (USCG) and the Federal Communication Commission (FCC). When the problem persisted for another month, we launched an effort at the local level to determine the cause of the jamming.
Moss Landing is a moderate-sized harbor about 100 kilometers south of San Francisco, in the middle of Monterey Bay. It has a mixed fleet of working fishing boats, pleasure craft, and three large research vessels used by the local scientific community.
The Naval Postgraduate School (NPS), with a large program in science and engineering, is located at the south end of Monterey Bay. The Monterey Bay Aquarium Research Institute (MBARI) has its headquarters in Moss Landing and two major research vessels berthed there. This organization supports the Monterey Bay Aquarium and also has a large engineering program, especially in underwater remotely operated vehicles.

MBARI has used GPS for precision location of their vessels since the early 1990’s, before the U.S. Coast Guard set up their system of DGPS stations along the coast. MBARI, with assistance from NPS, set up a differential station at their location at Moss Landing, using a UHF data link to send the corrections to their vessels.
After the April jamming report, NPS set up a monitor of the MBARI DGPS corrections to log the number of satellites being tracked. This clearly showed that the station was being heavily jammed. Reports of other GPS users in Moss Landing confirmed that it was a jamming issue and not a faulty receiver.
The jamming had impacted MBARI in several ways, including causing it to loose its GPS-based high-accuracy time reference. It would have caused difficulty at the narrow harbor entrance in fog. In at least two cases it caused small-boat owners to buy new GPS receivers, only to find they still could not get GPS in and around Moss Landing. One of the major ships in the harbor paid for a technician and new equipment to fix the problem, but finally had to turn off GPS in the harbor area, give the alarm that GPS was off line, and use radar only for harbor entrances in bad weather.
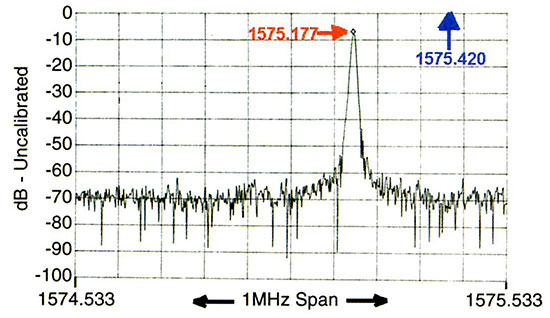
The GPS signal that feeds the MBARI reference station was also distributed to several laboratories and offices in the MBARI headquarters building, through a series of splitters and inline amplifiers. In an office with one of these drops, we set up a high-quality spectrum analyzer to examine the energy in a wide band about the GPS L1 frequency. Because there were several long cables and amplifiers between the antenna and the spectrum analyzer, the signals were not calibrated at the time they were taken. Later the system was calibrated. Figure 1 shows an example of the data recorded with a clear peak from the radio frequency interference (RFI) source many dB above the level of the GPS signals.
Identifying Source-1
We began our search for the source of the jamming radiation in early May, 2001, spending several days looking for it. Two factors complicated the effort: the large number of metal objects that reflected the energy, and the shifting of the frequency of the emitter.
George Badger fabricated a 17-element antenna with about a 30-degree beamwidth and used this with a portable communications receiver, a general purpose radio that fit in a shirt pocket. The initial search drove along the roads in the area and stopped at widely spaced locations to record the peaks of the RFI signal. We found multiple peaks in all locations, coming from the many reflecting structures in the area, including the largest conventional power plant in California.
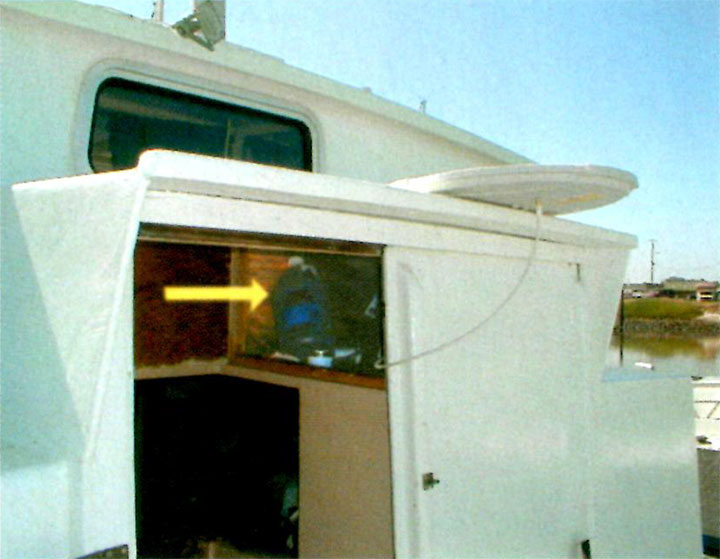
Figure 2 shows the locations where bearings were taken as green circles, and the bearings in blue. The red circle shows the actual location of the emitter. Without the red dot, it is hard to define where the most likely position is. After ruling out the power plant, we decided to look where there were no building or other reflectors.

Closing In. The team put the spectrum analyzer on a cart along with the small radio, and took them to the dock area. Even then it was confusing. Only by turning off shore power to individual boats could we determine the actual emitter location. The signal stopped and started again as we turned power to the vessel emitting the RFI signal off and on. The photograph, taken by a “kite camera” at about 200 meters, shows the locations of the RFI emitter, MBARI, and the power plant.
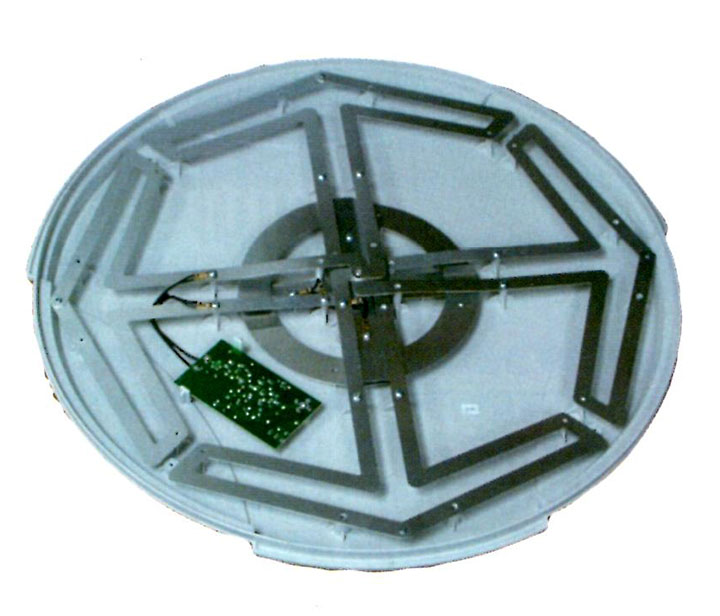
We contacted the boat owner and gained access, quickly determining that the emitter was a commercially available VHF/UHF television antenna with built-in preamplifier. The antenna was powered by an AC/DC adapter plugged into boat AC power. The preamplifier was thus powered all the time, even when the TV was not on. In fact, the TV was seldom on, and most of the time the TV antenna was in a paint locker inside the locked boat. From this interior location, its emissions jammed all of Moss Landing Harbor and an area at least 1 kilometer out to sea.
The day after we located the jamming antenna, we purchased it from the owner, took it to NPS for study, and informed the Federal Communications (FCC) San Francisco field office. We also distributed a memorandum describing the facts of the case to the U.S. Coast Guard and the GPS Joint Program Office (JPO).
Characteristics of Source-1
At the Naval Postgraduate School, we studied the antenna under controlled conditions and found it to have an internal preamplifier that exhibited unintended oscillations. The unit was normally powered from an inexpensive 12-volt AC/DC converter. In the tests it was powered from both this unit and a battery.
We studied the characteristics of the emission using another spectrum analyzer with its output sent to a waterfall display.
The unit proved extremely sensitive to the physical and electrical environment. We knew this from our search procedure, when modulation on the signal was recognized by its distinctive sound as a boat bilge pump. In an ad hoc experiment, we noted that the frequency varied over 3 MHz when one of us slowly moved his hand about 20 centimeters when it was 3 meters from the antenna. This is shown on the left in Figure 3. When the hand was held still, the frequency was much more stable, as seen by the section at the top of the traces.
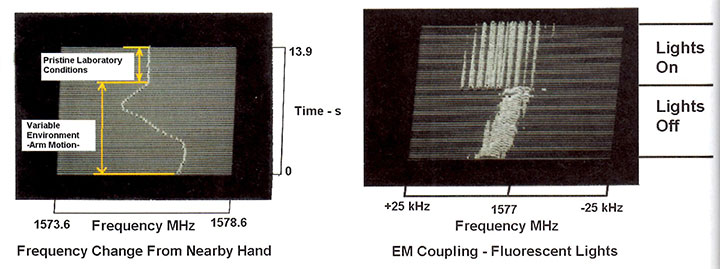
In another case, when running on batteries, the spectral pattern changed considerably when the overhead fluorescent lights were turned on and off. This effect is shown on the right. In order to get the narrow lines in the “lights on” condition, the spectrum analyzer was synchronized to the AC line frequency. We also found that the operation of a low-powered, hand-held transceiver (100 mW) operation at 150 MHz and 450 MHz caused large shifts in the oscillation center frequency.
To better investigate the electromagnetic coupling, we placed the unit in a good screen room. We were interested to see if you needed an external RF field from the lights, for example. It still oscillated, indicating that the oscillation would emit RFI energy just by being turned on. No special external conditions were required.
We obtained several other tests results, but conclude principally that the oscillation was self-exciting and very sensitive to environmental conditions.
The Suspects Multiply
During the hunt for RFI Source-1, NPS monitored the DGPS corrections broadcast by MBARI, automatically recording and plotting the total number of satellites for which corrections were generated every few days. While Source-1 was active, there were no satellites being tracked.
A few days after Source-1 was removed, we again plotted this log. Much to our surprise, there were still long periods when the MBARI GPS receiver was tracking few or no satellites. The MBARI GPS receiver was being jammed during most nights. Figure 4 shows a plot of the number of satellites tracked.
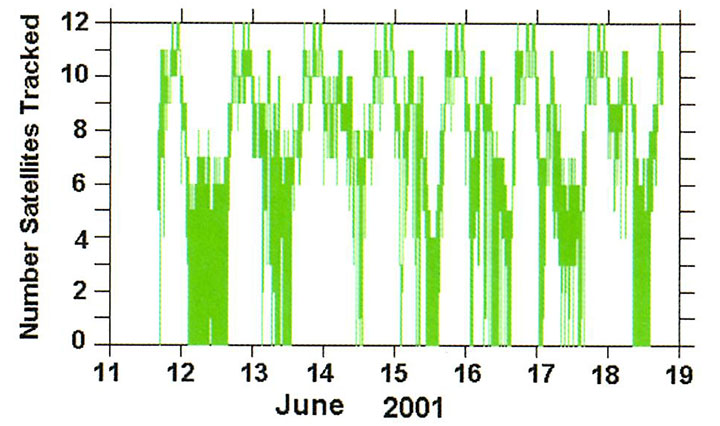
We conjectured that the jamming’s diurnal pattern derived from the temperature sensitivity of the second jammer’s center frequency. This turned out to be correct. The jamming was correlated with temperature and ended most days before 11 am.
This told us that we would have to hunt the source location at night and early morning.
Field Operations. The San Francisco FCC field office sent a team several times to Moss Landing to hunt for Source-2, and on several days both MBARI and NPS assisted. The MBARI high-quality spectrum analyzer monitored the signal from the laboratory this time, showing that its frequency moved during the morning hours and its level decreased as the temperature rose. We sent this frequency via cell telephone to the mobile team in the harbor seeking the RFI source. Figure 5 shows a typical early morning spectrum taken after removal of Source-1. Again the hunt was not easy.
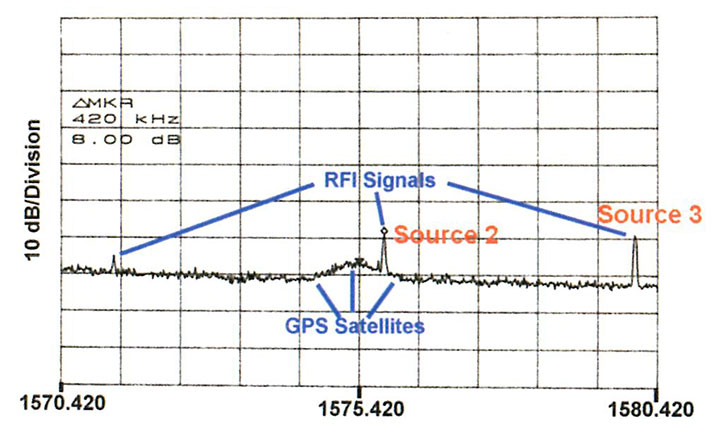
On the second FCC trip to Moss Landing Harbor, the signal in the GPS band had dropped by 10 dB in the late morning. We decided to hunt for the source of of a higher-level signal just outside the GPS band. This is the line at about 1580 MHz shown in Figure 5. The combined group quickly located the source of this signal. Again the combined use of a spectrum analyzer and portable receivers with a narrow-beam antenna was important. We also monitored the frequency on the spectrum analyzer inside MBARI and relayed the current value to the field team by cell telephone.

In the end, turning the power on and off to a few boats and correlating this with the RFI signal identified the culprit. It turned out to be a another commercially-available UHF/VHF television antenna on a boat, one dock over from Source-1. When it was turned off, only the line near 1580 MHz went away. Therefore we labeled this perpetrator as Source-3. This owner returned the unit to the place of purchase for a replacement.
The FCC has determined that the preamplifiers in Source-3 and Source-1 came from the same factory, which sold units to at least four well-known U.S. brand names of consumer electronic equipment. The bad units apparently began with a design change in late 2000; the number of units sold is not known to the authors.
Suspect Roundup. It is now clear that there were at least three signals capable of jamming GPS in the Moss Landing Harbor area. Two were located and removed by a coordinated effort of MBARI, NPS and the FCC.
The FCC made a few more attempts to locate Source-2 during the summer, but its level was lower with the higher temperatures. In the fall of 2001, the FCC succeeded in locating Source-2. It again turned out to be a VHF/UHF television antenna with preamplifier.
Calibration
There were a large number of spectra taken in the MBARI office. The signal came in the DGPS reference station antenna and went through two splitters and one inline amplifiers in the approximately 80 meters of low loss cable before emerging in the engineering office. Rather than examining the individual elements, we decided to calibrate the entire system.
A calibrated source was sent to a standard antenna about 2 meters from the antenna. The same analyzer used to acquire data on the RFI sources was configured as it had been for the experimental data. The antenna manufacturer supplied beam patterns for the antenna. In this way, the signals were now calibrated at the level outside of the antenna.
There still is an uncertainty about the space loss and antenna beam pattern gain/loss for actual sources. The latter can be found for the signals located, but not unknown signals such as Source-2. Accordingly the data were calibrated as a power level at the outside of the MBARI antenna.
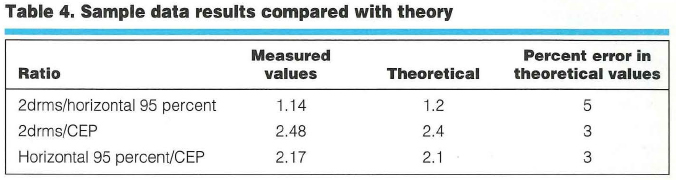
Comparison to a RFI Specification
The composite Figure 6 shows one spectra, now calibrated to dBm outside the antenna, and a specification for the RFI levels. This is the specification that aircraft GPS receivers used for GPS landing systems must meet. The values measured from several other spectra taken at MBARI have also been plotted on this figure. Clearly these signals were above the narrow band limits by amounts from 3 to 24 dB.
Source-1 had the highest level at -96 dBm. Its location is known to have been 325 meters from the MBARI antenna. It was at an elevation angle of -2.5 degrees. While the beam pattern of Source-1 is unknown, if it were omni-directional, it would exceed this FAA specification at a range of 50 kilometers or more. It is known to have caused marine GPS receivers to lose lock out to 3 kilometers. The effective power of this source can only be bounded from the data available. It is at least a few milliwatts.
Source-2 varied in frequency and level. While on top of the L1 frequency, it had a level of -106 dBm. Source-3 had a level at MBARI of -99 dBm. While it was about 12 MHz from the center of L1, the variation in manufacture is likely to have produced units with emissions much nearer L1.
Conclusions
In one small California harbor, at least three emitters capable of jamming commercial GPS receivers were present. Two were located and removed by the authors. They were active UHF/VHF TV antennas and appeared to have the same internal preamplifier. The FCC has located and removed the third.
Locating these sources proved difficult. It required a spectrum analyzer with averaging capabilities on a broadband antenna to track the jammer frequency and a narrow-band portable receiver with a directional antenna to localize it. Even then, a power on/off test was needed to verify that the source had indeed been found.
The existence of the jamming was well-known in Moss Landing Harbor, and reported at least once to appropriate agencies. However, the problem persisted until local engineers and scientist hunted down the worst offender. Clearly there was a system problem with reporting and removal of RFI sources. More education of harbor masters or some other change needs to be implemented to deal more quickly with this type of problem.
Acknowledgement
Gary Thurmond, a retired MBARI engineer, provided technical advice and participated in the location of Source-1 and took the aerial photograph of Moss Landing Harbor.
James R. Clynch is a research professor at the Naval Postgraduate School in Monterey, California, and has worked for 30 years in the use of satellite navigation systems for precision positioning and to study propagation effects. He has a PhD from Brown University.
Andrew A. Parker, Richard W. Adler, and Wilbur R. Vincent are research professors in the Department of Electrical and Computer Engineering at the Naval Postgraduate School. Their PhDs are from University of Maryland, Pennsylvania State University, and Michigan State University, respectively.
Paul McGill is an electrical engineer and George Badger a microwave technician at the Monterey Bay Aquarium Research Institute.
Manufacturers
The MBARI differential station uses a Trimble RL 4000 GPS receiver. The waterfront search employed a Hewlett Packard 8562 spectrum analyzer and an An ICOM IC-R3 5 communications receiver. A Hewlett Packard 8562E spectrum analyzer was used at NPS to study the emissions. Trimble Navigation provided a beam pattern for the specific antenna used on the MBARI roof, and the antenna used for calibration.