By J.K. Ray, S.M. Deshpande, R.A. Nayak, and M.E. Cannon
Published: May 2006 GPS World
In this month’s column, a team of researchers from India and Canada describe a GNSS radio and how they have used it to develop and test algorithms for processing both legacy L1 GPS signals and the new L2C signal.—Richard Langley
GITA (the Geospatial Information & Technology Association) held its Annual Conference 29 in Tampa, Florida, April 23-26. GITA President Susan Ancel called the conference, which included a poster session and a job fair for the first time, “the highlight of the year for the association.”
This year’s theme — “No Barriers: Connected. Responsive. Prepared.” — was explored in an interoperability demonstration that captivated the Opening Session audience. Executive Director Bob Samborski told the attendees, “what you’re about to see this afternoon is what we envision GECCo would look like in many respects,” referring to GITA’s Geospatially Enabling Community Collaboration initiative.
The premise for the demonstration — a scenario about Tampa’s bid to host the 2012 Olympic Games — may have been fictional, but the applications, data, and interoperability were real. To prepare a proposal that included analyses of emergency response, infrastructure, transportation, and other relevant capabilities, the would-be host city had to pull information from a host of dispersed datasets in a variety of formats. Tampa officials and geospatial vendors who collaborated in the live presentation succeeded at their task, proving that open standards-based software, data, and services can overcome data-sharing obstacles.
During the opening session, GITA also honored winners of the 2006 Excellence, Innovator, and Distinguished Service awards, as well as what Samborski called “the highest award the association can bestow” — the Geospatial Industry Lifetime Achievement award, which went to C. Warren Ferguson. In regard to his long career in the industry, Ferguson said, “understanding the value of location, and being able to communicate it,
is perhaps my greatest contribution to the geospatial community.”
The theme of “No Barriers” carried through to the show floor, where improved data sharing, technology integration, and collaboration reigned. TerraGo Technologies has added a capability to its GeoPDF file format that enables full round-tripping of markups and redlines, transforming a viewing tool into a collaboration tool. Once GeoPDFs are created with TerraGo’s MAP2PDF for GIS, then geo-enabled for commenting with TerraGo’s MAP2PDF for Geo-Enabling software and Adobe Acrobat Professional, any user with Adobe Reader and TerraGo’s Geo-Enabled GeoPDF Toolbar can export shapefiles for round-tripping back to a GIS.
CH2M HILL demonstrated several solutions that combine tracking technologies with Google Earth. The company’s GE Tracker plots the location of GPS-enabled devices (such as cell phones) in real time through the Google Earth interface. Example applications include recording the time a delivery driver spends at a particular location, routing the most conveniently located courier to a job, and keeping tabs on a child’s trip to a movie theater. As Vice-President of C&IS (Communications & Information Solutions) Nigel Nugent said, everyone wants to know “where’s my stuff, and what’s happening to it?”
LizardTech announced its Spatial Express application, which enables users to store raster imagery in an Oracle database in its native MrSID and JPEG 2000 formats. Spatial Express uses Oracle’s GeoRaster application program interface and provides raster imagery compression of up to 95 percent, with no visible loss of quality. Selective decoding reduces the time needed to view imagery by decompressing only the relevant region of an image.
FCSI unveiled IT3D for FME, a plug-in for Safe Software’s Feature Manipulation Engine (FME) that translates GIS data from more than 100 formats into high-resolution three-dimensional (3D) visualizations. IT3D includes 3D conversion software, a 3D viewer, a library of 3D models and textures, and communications interface software for GIS-to-viewer interaction. Visibility of individual features can be toggled on and off, meaning that a user can hide the surface of the ground to expose the locations of buried pipelines or cables.
Outside the exhibit hall, the use of GIS in managing underground utilities data was the focus of educational sessions about locating buried lines and populating “call before you dig” services with up-to-date information. Rather than using outdated paper maps or relying on memory, utilities and other organizations are now turning to a combination of GPS, GIS, and facility location technologies to create accurate maps of underground lines. Other sessions explored the use of GIS in such areas as work and asset management, emergency response, system integration, and planning, design, and engineering.
Throughout the event, the dynamic nature of the geospatial industry and its technology was apparent. Intergraph’s Vice-President and Chief Technology Officer Peter Batty discussed the changes brought about by rapidly evolving technology. Thanks to the increasing accuracy and availability of location-tracking technologies, he said, geospatial technologies once primarily limited to documentation and planning are now being used for dynamically scheduling and assigning work, and a host of other real-time applications.
The 30th Annual Conference and Exhibition, titled “Mission Possible,” will be held in San Antonio, Texas, March 4-7, 2007. For more information, visit www.gita.org.
Researchers, program managers, industry executives, and innovative product developers must chart a path to success through a challenging landscape of change in global navigation capabilities and expansion in markets.
Who are the leaders who will move the industry forward in 2006 and 2007? What strategies will they employ and what risks will they undertake? In this special report, GPS World looks ahead to identify the key influentials most likely to impact the industry this year and next.
As distinguished and accomplished as these individuals are, they are not the only leaders moving the industry forward. Far from it. If we used the entire length of this magazine, we might have room enough to profile all the people deserving this level of recognition. So, our selection had to be a bit, well, selective. And it may be arbitrary on many counts. But we will do it again, and there will be time and room enough to include more new faces in recognition of the fast-growing nature of the GNSS industry.
Our only rule in compiling this gallery was that the members of the magazine’s Editorial Advisory Board, who nominated most of those shown here, were themselves excluded from appearing, even though they all exemplify leadership and vision, with long careers and many important projects underway. In the end, we had to violate even that rule, as so many advisors nominated two of their number, that we did include them.
You will hear more from these individuals — in the pages of GPS World, in technical conferences, in top-level industry and agency meetings. Whenever you have the chance to hear or talk with them, take it.
Suman Ganguly
President | Center For Remote Sensing, Inc.
Ganguly assembled a group of researchers under the banner of Center For Remote Sensing, Inc. (CRS), a relatively small firm, and has carried out advanced GPS technical R&D, developing the first (or one of the first) software GPS receiver. CRS pioneered software radio technology before 1990, in communication and radars supported by the Defense Advanced Research Projects Agency and the National Science Foundation. CRS adapted these technologies for software navigation systems and currently supports advanced navigational system developments (including a variety of receivers and simulators) for several Department of Defense organizations. Involved with various software-based navigation systems, software radars, software communication systems, and related areas, Ganguly plans to continue innovating in all areas of GNSS and related fields.
Michael E. Shaw
Director, National Space-Based Positioning, Navigation, and Timing (PNT) Coordination Office
As head of the new PNT Coordination Office, Mike Shaw takes a more independent role as arbiter and coordinator of U.S. policy, gaining a reputation among Assistant and Deputy Secretaries as the go-to-guy for the straight talk on GPS issues. “In light of the unprecedented growth in GNSS constellations and signals, our goal in the Coordination Office is to support the U.S. National Space-based PNT Executive Committee in improving U.S. policy and management framework governing GPS and its augmentations to ensure that this technology continues to fuel the engine of economic growth and opportunity in the United States and throughout the world.”
Tim Murphy
Technical Fellow | Boeing Commercial Airplane Group
Involved in many aspects of communications, navigation, and surveillance to support future air traffic management, with a particular focus on GNSS, Murphy has helped deploy and test GNSS landing systems (GLS) using Ground Based Augmentation Systems (GBAS, also known as Local-Area Augmentation Systems, or LAAS) in several places around the world. He’ll move ahead with new operational procedures to improve airline operational efficiency and safety through use of Required Navigation Performance (RNP), much of it enabled by GNSS. “And Boeing will continue to support the extension of GBAS standards to include new levels of performance that can support GLS CAT II/III operations.”
Elizabeth Cannon
Professor and Head, Department of Geomatics Engineering Schulich School of Engineering | University of Calgary
Calgary has become a key source of highly-trained GPS/GNSS specialists for both industry and other advanced research institutions. While directing studies and actively recruiting new graduate students, Cannon’s own research currently focuses on precise vehicle positioning systems that integrate GPS with low-cost inertial systems and dead-reckoning sensors. “We will also continue to analyze the new GPS (particularly L5) and Galileo signals to determine how we can best exploit these signals for precise positioning.”
Stephen Verhoeff
President and Chief Executive Officer CSI Wireless
“We are excited about our future in this business as applications for GNSS mature and new ones emerge. We have learned over more than 15 years of involvement in this industry that product development, adoption rates, market awareness, and human understanding of technology all take longer to develop than what we first expect. Within this context we look forward to 2006 and 2007 as more capability is put into space, and as we drive more innovation into this market that we serve.”
Patrick McDougal
Vice President, Corporate Development | Inmarsat
Inmarsat’s mobile satellite services are already integrated with GNSS, as the satellites re-broadcast GPS corrections for both EGNOS and WAAS. And Inmarsat will have overall management leadership in the newly formed Galileo Operating Company. “Due to open standards, interoperability, and converging technologies, the distinction between communication networks and positioning services will fall by the wayside,” says McDougal. “The opportunity for Inmarsat will be to tap into the revenue potential of these converging technologies. We know from our own provisioning experience that additional benefits such as increased position accuracy, system integrity, and service authentication are attractive to our customers. These benefits, to be offered by Galileo, will help to expand the market for GNSS and will further the use of mobile satellite communication networks as delivery infrastructure.”
Stig Pedersen
Senior Director of Strategic Marketing Thales
“At Thales I study coming market and technology trends, but I also hope to influence them. My drive is to capitalize on trends like value-based GIS solutions and the increasing spatial awareness in the world, made more popular through products like Google Earth. These concepts can unlock the imagination of people who have never considered how GIS coupled with the latest communication technologies can enable better business. My goal is to increase the size of the market, at all levels, by implementing cost-effective, high-quality solutions that are easy for any business to adopt.”
John T. Kelly
Technical Director for Advanced System Development Sensor Systems Government Systems, Rockwell Collins
“Amid the cornucopia of signals and whirlwind change, three constants exist. First, change is cyclic, and the historic pattern between reliance on external sources for navigation versus more autonomous means may peak shortly towards externally dependent approaches. Second, increased concern regarding security and fraud underscores the importance of access control and anti-spoofing, especially for militarized use. Lastly, adaptability and innovation are even more important to keep pace with change and to develop applications extending GNSS utility beyond its navigation-only roots.”
Headshot: Per Enge
Per Enge
Research Professor | Stanford University
A key educator as well as researcher, Enge turns out a yearly crop of new PhDs whose R&D impact augments his own direct work. “My immediate goal is to complete the most challenging aspects of the safety analysis for the local area augmentation system (LAAS). Rare ionospheric events have proven to be the most vexing fault mode, and the Federal Aviation Administration-led team is closing in on the solution. My more long-term goal is to launch the Stanford Center for Position Navigation and Time, where we will foster the technology that will enable GPS operation in challenging signal environments — including obstructions and radio frequency interference.”
Jocelyn Vigreux
President | TomTom US A
“TomTom will continue to push the envelope of innovation in 2006. Our focus has been and always will be navigation, however in 2006 TomTom will introduce products that not only help people get from A to B, but that help people get from A to B better, with a focus on personalization. Features such as the ability to listen to audiobooks, hear traffic and road conditions, and iPod compatibility are some of the ways TomTom incorporates personal lifestyles into our new navigation products. TomTom caters to the masses and plans to bring products to market that can be incorporated into everyone’s life.”
Jim Sennott
President | Tracking and Imaging Systems Inc.
A small-business owner doing advanced GPS technical R&D, Sennott was one of the first to patent deeply integrated GPS receiver processing. “We will continue to offer our customers robust and highly accurate GNSS solutions in challenging reception environments: high dynamics, signal blockage, multipath, and jamming. Integration of selected GNSS engine and inertial measurement unit (IMU) sensor components with our Integrated Demodulation-Navigation and Optimal Diversity processors provides a cost-effective path for achieving desired accuracy, continuity, and integrity levels in military and civilian landing systems, test range truth systems, and vehicular guidance applications. In the coming year we look forward to upgrading our integration facilities and simulation tools to support the latest GNSS sensor and IMU technology to meet unique customer requirements.”
Karen Van Dyke
National Technical Expert for GPS | RITA/Volpe Center U.S. Department of Transportation
“The U.S. Department of Transportation (DOT) faces challenges in harmonizing and coordinating research for improved use of GPS and development of augmentation systems. Currently, GPS activities are dispersed across the Operating Administrations. Without a management structure to coordinate research activities, there is the risk of duplication of effort and resources. The Volpe Center, as part of DOT’s Research and Innovative Technology Administration (RITA), will identify and track current GPS transportation applications and research activities across all DOT modal administrations; determine the GPS research activities that should be undertaken which are not being performed; identify current resources and resource gaps within DOT; identify where future GPS research efforts should be focused; and promote coordination and leveraging of GPS technical capabilities across DOT to prevent duplication of effort. RITA also will lead development of the national Positioning, Navigation, and Timing (PNT) Architecture effort on behalf of DOT.”
Hans-Juergen Euler
Leica Research Fellow | Corporate Technology and Innovation Leica Geosystems AG, Switzerland
As Galileo materializes into an accessible system over the next few years, Euler plans a variety of activities using the signals provided in the in the German Galileo Test and Development Environment (GATE). “Then Galileo signal analysis paperwork meets reality. Leica Geosystems’ ideas for future processing approaches can be tested with actual combined GNSS signals. Future applications for our surveying and machine automation solutions will be even more distance-independent and robust because of combined satellite constellations.”
Steven W. Berglund
President and Chief Executive Officer | Trimble
Trimble’s technology strategy has expanding GNSS capabilities at its core. The company released an L2C-capable product a full year before launch of the first IIR satellite capable of broadcasting that signal. Its R8 GNSS system and NetR5 reference station represent initial steps in product concepts that encompass GPS next-generation signals, GLONASS, and Galileo. Berglund says the company will continue to “anticipate satellite infrastructure improvements. Our plans for 2006 and 2007 are to continue to release new products consistent with this expanded GNSS architecture, contemplating the continued development of the Galileo system. Our goal remains that of offering solutions that meet our customers’ needs by using the best technology available, now and in the future.”
Neri G. (Tom) Terry, Jr.
Geospatial Information and Services (GI&S) Plans and Policy Officer U.S. Marine Corps Headquarters
“One area we emphasize is full integration of the Global and National Spatial Data Infrastructure (NSDI) and GPS for our military operating forces and other users of GPS. To this end, representatives at all levels of government and the private sector are collaborating to implement a non-proprietary standards-based grid. This grid will serve as a language of location, optimized for local operations — enabling geo-addressing and a universal map index. This effort will reduce operational friction, improving the speed and efficiency of both precision operations and emergency response.”
Headshot: Javad Ashjaee
Javad Ashjaee
President and CEO | Javad Navigation Systems
“In the last few years, I could not be as effective as I would have liked due to situations beyond my control. However, I am currently enjoying my independence and looking forward to a new beginning. I still spend about one-half of my time in Moscow. A frozen lake and abundance of snow there last winter introduced me to a new hobby, snowmobiling, and provided me with a nice break from work on technology. With new GPS signals, new GLONASS structures, and the Galileo ICD on the horizon, and my complete independence, I look forward to a new round of technology challenges. I have started a new venture and am fortunate to have a group of gifted colleagues with me. I am extremely excited about the possibilities that the coming years will bring.”
Sang Jeong Lee
Korean GNSS Task Force | Professor Chungnam National University, Korea
In one of the world’s fastest-developing wireless and location-based services markets, Lee believes that “GNSS technology must add value to IT-related markets, especially to the wireless network market. Hence, GPS/Galileo receivers and assisted-GNSS technology will be developed.” Further, “in this kind of digital convergence market, safety should be one of the most important impact factors. In this regard, we will investigate interference mitigation technology and integrity monitoring schemes.” Finally, he will help develop plans for a regional integrity monitoring system to be deployed as part of the Korean national infrastructure.
Rob Rovetta
Senior Director of Product Management QUALCOMM CDMA Technologies
With 150 million gpsOne cell phones and 500,000 Omnitracs units, QUALCOMM may be the world’s largest GPS manufacturer, by unit volume. “The adoption of GPS-enabled location services on wireless networks is accelerating in North and South America, Europe, Asia, and elsewhere around the world. QUALCOMM focus will be to expand the location services available to wireless users by enhancing our gpsOne positioning technology’s capabilities and further integrating position location into multimedia services. We will work closely with network operators, device manufacturers, and application developers and publishers to deliver a location-enhanced mobile experience to people everywhere.”
Daniel Ammann
Vice President of Research and Development, GNSS Software | u-blox
u-blox is diversifying its portfolio to fit the needs of a wider clientele, from provision of assisted GPS (AGPS) and similar services through the development of specialist applications such as timing receivers to low-cost receivers for mass-market consumer products. Amman targets meeting ever-lower power requirements and shrinking die sizes, while incorporating next-generation navigation signals such as Galileo, L2C, and QZSS in multi-band, multi-system GNSS receivers. He will spearhead research efforts “exploring innovative ways of using non-GPS signals for navigation purposes as well as, as always, the challenge to achieve ever-higher sensitivity, accuracy, and reliability levels.”
Logan Scott
Logan Scott
President LS Consulting
“Location-based encryption and authentication provides an added layer of security by forcing users to be at particular locations and times to access or generate data. This is in addition to knowing the correct keys. Financial transactions, credit report security, medical records keeping, privacy protection, digital cinema transport, and military database protection are among the myriad applications. Currently I’m working with GeoCodex LLC on integrated GPS/cipher devices for use in a variety of security products. Authenticating the position solution using a variety of antispoofing techniques is one of the major challenges, particularly for the civil user.”
Hideto “Duke” Takahashi
Assistant General Manager, Space Business Strategy Aerospace & Electronics System Division | ITOCHU Corporation
“With the launch of GIOVE-A and renewed Russian interest in accelerating GLONASS, it appears the global positioning, navigation, and timing (PNT) environment will emerge from GPS domination. Most states depending on these signals rely on external systems operators for PNT services. As PNT infrastructure dependence grows, it is likely that states will either want more involvement in the operation and control of these global systems or will pursue regional PNT alternatives. One such alternative is the Japanese Regional Navigation Satellite System (JRANS). A key strength of JRANS is that GPS signals will be used, but in the event GPS signals are not available, JRANS will continue to provide reliable PNT services for the entire Asian community.” While Itochu’s JRANS project has taken a back seat to QZSS for now, Takahashi and Itochu are still significant players guiding satnav developments in Japan.
Martin U. Ripple
Galileo Program Director | EADS Space Services
An articulate and energetic force within the Galileo concessionaire hierarchy, Ripple has not been afraid to challenge the European Commission on issues that may be politically rational, but do not make sense from a business standpoint. He is a strong advocate of full U.S.-Europe cooperation to develop the combined satnav market. “Satellite navigation is on the brink of a new era in the same way mobile telephony was in the ’90s. I have seen during visits with car manufacturers, mobile phone integrators, and others what the future has in store, and these opportunities excite my finance heart and engineering soul. As an active part of the Galileo Concession team, I plan to implement many of the known (and unknown) satnav services with my partners and will strive to maximize satnav usage worldwide. The issue of interoperability remains my underlying conviction as there will be no global services without global standards.”
Ann Ciganer
Executive Director, Policy, U.S. GPS Industry Council Vice President of Strategic Policy, Trimble
Ciganer has quietly but effectively advocated for every major GPS issue of the past 15 years, helping create the current export control regulations that allowed civilian GPS markets to blossom, and influencing development of the first Presidential Decision Directive in 1996. She identified threats to the GPS spectrum from mobile satellite services and ultra-wideband and formed coalitions with other industries to counter spectrum grabs by competing wireless services. “We will actively build on the cooperation that the industry established at the 1997 World Radio Conference to protect GNSS spectrum. Our goals are to preserve a stable GNSS noise floor to allow market-driven technology convergence, ensure a level playing field, and minimize trade barriers; actively participate in facilitating regulatory compliance such as on environmental issues that affect the industry; and promote GNSS productivity benefits worldwide.”
Diane Cornish
Director of Navigation Programs | Lockheed Martin Integrated Systems and Solutions
“I have the privilege of leading a dedicated team with deep navigation expertise and commitment to the GPS mission. The team’s experience reaches back nearly 30 years to the development and deployment of the first GPS Operational Control Segment in partnership with the U.S. Air Force. On the GPS IIF program, we’re working closely with our prime, the Boeing Corporation, and the acquisition and operations USAF organizations to deploy the most comprehensive change to the Operational Control Segment since its inception. The upgrade will replace the legacy system with a distributed architecture that will provide the foundation for future capabilities and services. We’ll continue our stewardship of GPS into the coming decades through award of the next-generation space and ground systems. In the broader GNSS community, we’re excited about the possibilities for interoperability between GPS and Galileo and are forging partnerships to develop these opportunities.”
Lee Ott
Chief Scientist | OmniSTAR
As part of Fugro, OmniSTAR has a long track record in positioning services. “We are fortunate enough to have a stable group of developers who have worked together since GPS was in its infancy, and our accumulated knowledge and experience in operating real-time systems gives a decided advantage. Our present HP and XP services offer unprecedented accuracy, and we are poised to take advantage of new GPS and Galileo signals as they become available. In addition, we are integrating GLONASS into our high-accuracy services to provide what we call All in Sky service.”
Penina Axelrad
Professor and Associate Chair Aerospace Engineering Sciences Colorado Center for Astrodynamics Research | University of Colorado
Axelrad’s research explores the use of GPS bistatic radar to augment aircraft safety and make scientific measurements of the Earth from airborne platforms; her goal is to maximize the retrieval of information contained in GNSS signals reflected from Earth surfaces. “I am excited about new developments in the modeling and analysis of multipath that could be used to enhance the quality of the GNSS observations at permanent sites.” She helps educate the next generation of GNSS engineers and scientists through classroom teaching of satellite navigation material and involvement in multidisciplinary and multi-level research project teams. “I am also committed to using GNSS to strengthen the science, math, and engineering education of younger students by working with colleagues in math and science education to develop teaching materials that can inspire and reinforce fundamental science and math learning at the K–12 level.”
Ray Simeon
President | CAST Navigation
Next-generation aircraft incorporate multiple tightly-coupled GPS/INS devices as part of their navigation systems. They also use these devices for radar, high resolution optical systems, smart weapons, mission systems, and so on. For simulating this type of environment in the lab, CAST is developing technology that will integrate multiple GPS and inertial navigation system capability into our simulators. The most critical challenge is addressing synchronization issues among all these devices as they would be on the aircraft.
Headshot: Frank van Diggelen
Frank van Diggelen
Vice President of Technology Global Locate, Inc.
“Over the next two years, GPS will be designed into almost every new cell phone and many PDAs. As this happens, the innovations of the last five years are going to move into the mainstream — ephemeris over the Internet, sub-second time-to-first-fix, and the like will become standard. And, of course, the receivers we build in 2007 will not be just GPS anymore, but true GNSS with at least GPS + Galileo, and maybe GLONASS too. I plan to be contributing to all this. What I’m not planning on is much rest!”
Headshot: Martin Unwin
Martin J. Unwin
Head of GNSS/GPS Team | Surrey Satellite Technology Ltd (SSTL)
Unwin’s team designed to spec, built, and delivered the GIOVE-A satellite on a faster track than conventional industrial procedures used for the GIOVE-B could accomplish. Although the efficient single-site SSTL is not typical of European space contractors, SSTL has demonstrated that it can deliver and is available for future business. “Using our in-orbit assets and with the University of Surrey, we will explore and develop advanced GNSS receiver technology for orbit determination on higher altitude and groups of satellites; robust and accurate attitude determination of space vehicles; remote sensing from space using GNSS reflections off the Earth’s surface; and receiver techniques and space applications of the new Galileo and GPS signals.”
Colonel Richard L. Reaser, Jr.
Deputy System Program Director Navstar Global Positioning System U.S. Air Force
Leading the technical effort to negotiate an agreement with the European Union on Galileo commonality with GPS, Col. Reaser has a host of decision inputs that will influence future GNSS for civilian and military users worldwide. “We will soon launch the second GPS Block IIR-M satellite and begin fielding the Architecture Evolution Plan 5.2 Control Segment. We will award long-awaited GPS Block III Space Vehicle, Next Generation Control System, Modernized User Equipment, and Modernized Space Receiver contracts. We plan to field more aviation receivers certified to use military signals in the National Airspace System. Our new multinational agreement, GPS and Navwar Research Development Test and Evaluation Memorandum of Understanding, will provide for more international cooperation. I look forward to implementing a common navigation signal for GPS, Europe’s Galileo, Japan’s QZSS, and potentially the Russian GLONASS.”
Headshot: Curtis Hay
Curtis Hay
Director of Business Development Spirent Federal Systems
“With the exciting changes in store for all of us come more opportunities and choices. My role is to anticipate and prepare for evolving requirements in test equipment as we see progress toward a Galileo constellation; more GLONASS satellites; more L2C, L5, and M-code-enabled GPS satellites; and continued growth of regional augmentation systems — and to satisfy our customers’ unique RF and inertial test requirements.”
Carolyn P. McDonald
President | NavtechGPS
Building on 22 years of providing professional GPS/GNSS services, McDonald has her company poised to take their educational services to the next level with plans for E-learning seminar programs. New courses in 2006 for on-site training and public venues for government, military and corporate entities include Galileo Developments, Open Source GPS, and Advanced Receiver Processing of GNSS Signals. Navtech has formed a partnership with a European organization to present courses on that continent. “In 1988, someone said we had saturated the GPS training market, but in 2006 we see a bright future not only in training but also in GPS equipment sales, now the larger part of our company.”
Headshot: Paul Verhoef
Paul Verhoef
Head of Unit, Galileo, Intelligent Transport Systems European Commission, DG TREN
“The single biggest objective for 2006/2007 will be to put in place the public-private partnership, based on a concession contract, that will construct, deploy, and operate the Galileo satellite navigation system, and market associated services around the globe, by the year 2010. The foreseen launch of Galileo is changing the face of satellite navigation already and we are thrilled with the tremendous prospects of the technology.” Verhoef has frankly stated that Galileo needs U.S. companies and compatibility with GPS to be successful. He shows the will to cut through some of the bureaucracy that has characterized Galileo promotion and to create a cooperative environment with the United States, promoting compatibility of GPS and Galileo, as well as investment by non-European firms in Galileo equipment and applications.
Nidhi Upparapalli
Director of Mapping & Content | Thales
“I drive both consumer and precision GNSS technology development. My most important work is related to delivering enhanced location-based content to users. Real-time services like traffic, weather, and predictive routing are key technologies that my team and I work on, as well as content enhanced with multimedia. But the real focus of my efforts this year is in content formatting and compression. When done well, this enables the convergence of content on multi-application GNSS devices. My work will enable you to soon carry a tiny, multi-application device that lets you position and navigate in whatever setting you choose and with an unimaginable library of location-based information and services at your fingertips.”
Lee Vetter
President | Integrated Guidance Systems, LLC
“Smaller, smarter, more agile: GPS navigation’s current challenge is to extend air power’s dominance in precision guidance to smaller weapons and to our surface forces. We are witnessing the need for more precise guidance solutions to minimize collateral damage in urban close-combat settings. Jamming threats are increasingly diverse and proliferating. Our end-use customers have stated unequivocally that the war fighter is dependent on industry to achieve affordability commitments. Integrated Guidance Systems LLC, a joint venture of Honeywell and Rockwell Collins, is uniquely meeting this need by deeply integrating MEMS and SAASM technology in anti-jamming guidance and navigation solutions. Early units are hitting targets with in-spec performance at record-setting ranges. Integration of network communication links will provide the flexibility of retargeting and the intelligence of battle damage assessment, broadening the impact of GPS navigation well into the next decade.”
Kanwar Chadha
Founder | SiRF Technology
“In 1995, we founded SiRF with a simple vision of taking GPS to the masses. Today, GPS-enabled location is becoming a part of consumers’ daily lives. The challenge is to meet mainstream expectations, which we in the high technology world tend to underestimate. Simply put, consumers believe that location capability ‘should be affordable and work reliably everywhere — no ifs, buts, or maybes!’ This means enhancing the location platform by improving reliability using all available sensors and signals including but not limited to GPS, Galileo, dead reckoning, and wireless; easing integration by making it smaller, lower powered and more affordable; and improving user experience through an ecosystem of location-enabled devices, content, services, and applications that makes them happy to pay for the service they want.”
Raymond J. Swider
Assistant for Position, Navigation and Time (PNT) and GPS Office of the Assistant Secretary of Defense for Network and Information Integration (NII) U.S. Department of Defense
A long-standing fixture in the GPS policy community, Swider has been pushing the envelope and occasionally ruffling feathers, internally and externally, with innovative views and studies concerning ways to generate revenue to maintain the GPS constellation and introduce improvements and innovations sooner than planned. “My goals for this year are to assist NII in strengthening OSD oversight of the department’s PNT programs and policies. In particular, this means building a constructive relationship with the U.S. Air Force for keeping GPS modernization on track, ensuring that the National Security Space Office study on a future PNT architecture charts a path ahead for the department’s medium to long-term investments in PNT solutions, and working with the staff of the National PNT Coordination Office to support the goals and objectives of the National Space-based PNT Executive Committee for national level space-based PNT solutions.”
Lionel J. Garin
Chief Technical Officer | NemeriX SA
An experienced industry veteran, Garin just took over the lead technical spot with this young Swiss fabless semiconductor company specializing in ultra-low-power RF and baseband integrated circuits. “The innovation cycle in the GPS industry has produced bursts of creativity approximately every four years. The latest breakthrough — assisted GPS — has brought this technology closer to the cell phone user. The next wave will blend multiple non-GNSS location technologies and federate them under GNSS to provide pervasive location anytime, anywhere. I am personally excited to be part of the next revolution coming up with Galileo.” Nemerix has opened a new R&D center in Silicon Valley to combine resident GPS expertise with its silicon technology.
Eduardo Falcon
Senior Vice President of Product Development Topcon Positioning Systems
Falcon believes the future of the positioning industry depends on its ability to seamlessly integrate different technologies. “User dependency on satellite positioning will grow in all aspects of our lives. Accuracy is addictive,” he says, “so significant growth can be expected in the demand for higher accuracy positioning data provided on a constant basis, with standardized quality, regardless of local conditions. The availability of G3 (GPS, GLONASS, Galileo) technology positively impacts the ability to produce such solutions. However, the integration of GNSS with other technologies is key to producing dependable positioning with standard quality, at all times.”
Headshot: Peter Grognard
Peter Grognard
CEO | Septentrio Satellite Navigation
“In the next couple of years, the world’s community of GNSS users will enjoy many new exciting technical improvements and commercial possibilities. Septentrio is convinced that it is crucial for the success of the GNSS industry to enable early use of those new capabilities. Septentrio has a legacy of introducing receivers for new signals, such as EGNOS, L2C, and of course, Galileo. We have just introduced the AsteRx receiver, the first commercial fully Galileo-capable OEM engine, and we are committed to launching new innovative all-signals-in GNSS products in the coming months and years.”
Ralph Garcia
Director of GPS and Navigation Systems (GNS) | Raytheon Space and Airborne Systems Division
“GNS applies its electronics-based technology to avionics, high anti-jam receivers and integrated GPS/INS (inertial guidance system) navigators for several high-profile weapon systems and military aircraft. The plan for 2006/2007 is to continue providing enabling solutions for platforms such as C-130 AMP, F-35 JSF, V-22 Osprey, AV8B Harrier, F/A-18 E/F, Standard Missile 3, Tactical Tomahawk, Paveway, Joint Standoff Weapon, and Miniature Air Launched Decoy. GNS is also developing advanced technology such as Miniature Navigation Demonstration and the next-generation Modern User Equipment.”
Joel Houlton
Vice President and General Manager, Missiles and Munitions | Honeywell Defense & Space
“Our military customers continually challenge us to build up a GPS navigation system’s immunity to jamming and denial techniques. We have a number of GPS anti-jam approaches, fielded and under development, that address increasing thresholds for jammer resistance. The interrelationship of GPS and inertial navigation system (INS) operation is migrating from loosely coupled to deeply integrated. Front-end GPS antenna techniques are evolving to a complete digital architecture. Chip-scale atomic clock development will provide state-of-the-art timing stability and increased jamming immunity. With the array of military platforms and missions, GPS navigation is not a ‘one solution fits all’ business model. As a GPS navigation integrator, we have the flexibility to provide anti-jam organically or use outside sources. New platform starts generally require integrated solutions. Fielded products benefit from GPS/INS upgrades or add-on anti-jam antenna solutions.”
Headshot: Oscar Pozzobon
Oscar Pozzobon
Technical Director, Satellite Navigation Systems | Qascom
Examining satnav and security applications, Pozzobon has an entrepreneurial approach more reminiscent of Silicon Valley than of Europe. His ideas may challenge export control guidelines and trigger policy debates as the lines blur between commercial security or interference rejection and military anti-jam. “The drivers in the civil GNSS security market will be safety of life, secure tracking, trusted positioning, and secure time applications. We expect the GNSS security market to follow the IT security market: as use of IT technologies grew, the number and sophistication of attacks increased at alarming rates. We anticipate a similar trend in GNSS security.” The company will develop GNSS receiver security, GNSS signal security simulation tools, and the continued evolution of middleware for trusted GPS tracking.
Per Ludvig Normark
Chief Technology Officer | NordNav
The first to introduce software-based satellite navigation at the commercial level, NordNav’s embedded software receiver uses host CPU to calculate position, saving space and processing power. “We are particularly excited about our contract with a Nordic mobile handset vendor to have the first software location-enabled mobile handset on the market before the end of 2006. We will then be well-positioned to expand in the Asian and North American markets.” NordNav also claims to be first to release a commercial receiver supporting the Galileo Open Service modulation; the Galileo Joint Undertaking tapped it to lead a pan-European consortium in 2006 to develop and release mobile safety applications based on Galileo.
Headshot: Philip Mattos
Philip G. Mattos
Chief Engineer, GPS and Navigation | ST Microelectronics R&D Ltd.
“My 2006 goal is to see my ideas for high-sensitivity GPS, in personal research since about 2001 and in development at ST for the last two years, implemented in silicon and out into the field. This should bring to the high-quality market in cars and to the consumer market in handhelds a real indoor capability, rather than the limited lab or demo indoor operation of the past few years. My 2007 goal is to see those high-sensitivity products in volume, and then the Galileo designs working in the lab and starting to be designed into customer products as “Galileo-ready,” needing only software upgrade to work with the satellites as they launch. Working on Galileo study contracts from the late ’90s, before it had a name, seeing it come to fruition tracking a single satellite, then getting the first fix will be the culmination of a long and productive path.”
Headshot: Marco Falcone
Marco Falcone
System Engineering Manager | Galileo Project Office | European Space Agency
“ESA’s absolute priority is to keep the schedule of the program on track to maintain user expectations and get into operations soon,” says Falcone. The agency will launch GIOVE-B, in the second half of 2006, to complete validation of critical payload technology in orbit, in particular the passive hydrogen maser frequency standard. Falcone will be responsible for critical design reviews of the main GIOVE-A and GIOVE-B subsystems in late 2006 and early 2007, leading to authorization to manufacture the operational system. He’ll help to ensure GNSS interoperability with GPS, in particular a common L1 signal for GPS III and Galileo and a GPS-to-Galileo time offset broadcast in the navigation message. And, he’ll participate in coordination efforts with GLONASS and QZSS.
Phil Kelton
GPS Military User Equipment Program Manager | Raytheon
“The future of military GPS is bright! Technology progress and government policy changes have provided opportunities to develop military GPS modernized receivers with improved performance, improved security and reduced cost. Cell phone, personal computer, and gaming console developments have pushed ASIC technology forward while government policy changes have allowed for contractor-developed integrated security solutions. The potential exists to achieve true force-enhancing status for military GPS though the proliferation of low-cost GPS MUE.”
Jon Ladd
President and CEO | NovAtel
Heading a Canadian company that has landed key contracts for reference receivers in national aviation ground networks in the United States, Japan, Europe, China, and India, Ladd has also guided NovAtel to a strong pole position in Galileo ground infrastructure — unique for a non-European company — and poised for future commercialization of Galileo technology. He plans “continued significant investment in core R&D innovation and integration — the combination of GPS with other satellite systems, as well as the integration of GNSS with other complementary technologies.” He cites the recent launch of the company’s next-generation OEMV family of receivers, capable of receiving multi-frequency, GPS and GLONASS as well as L-Band DGPS signals, as an example of what to expect.
Michael O’Connor
Chief Technology Officer | Novariant Inc. (formerly IntegriNautics Corp.)
With the dramatic increase in use of high-precision GNSS for machine guidance and control, new opportunities emerge every day in agriculture, mining, transportation, asset management, and government. Pseudolite-based GPS augmentation technologies are now commercially available, and improvements in quality and quantity of signals-in-space lie right around the corner. We look forward to meeting the needs of these growing markets, with hands-free steering and visual guidance of farm vehicles; sub-inch, hands-free steering of container-moving gantry cranes in ports and rail yards; and pseudolite-based GPS augmentation systems for open-pit mining.
Headshot: Ron Hatch
Ronald Hatch
Director of Navigation Systems | NavCom Technology, Inc.
With availability of three frequencies in GPS and Galileo nearing, Hatch’s current research includes “exploring the recently patented concept of smoothing one refraction-corrected composite phase measurement with a second. By resolving the ambiguities across two of the frequency differences and then refraction-correcting the results, a noisy measurement is obtained with no cycle ambiguity. This composite phase measurement can be smoothed with a second refraction-corrected measurement constructed to minimize the noise. As the smoothing progresses, the resulting increasingly accurate, refraction-corrected, ambiguity-resolved, phase measurement should enable real-time kinematic (RTK) accuracies across large distances.”
Hiroaki Maeda
Engineering Manager, Satellite Navigation and Positioning Systems Division, NEC Toshiba Space Systems Ltd.
Maeda has key project responsibility for the Quasi-Zenith Satellite System (QZSS) over the Asia and Oceania region, envisaged chiefly as a GPS (and Galileo) augmentation providing a new integrated service, primarily for mobile land applications in Japan. He will help guide the system through its development phase in 2006–07, moving toward a first satellite launch in 2009. His research efforts also explore indoor navigation.
Jean-Luc Issler
Head of Transmission Techniques and Signal Processing CNES Toulouse Center Radio Frequency directorate Delegate to the Galileo Signal Task Force
Issler’s top priorities are navigation signal design and processing and advanced navigation receivers. He is involved in the development of several GNSS receivers for space and ground applications. He predicts a generalized use of GNSS for spacecraft navigation, timing, and applications such as GNSS radio-occultations for meteorology, and is convinced of the software nature of future navigation technologic cores. With colleagues, he developed a GIOVE signal-performance evaluation system including top-level signal samplers and digitizers. The French Space Agency team also developed a very flexible GNSS signal generator, using an innovative concept that will be reused onboard Galileo.
Marie Lage
Owner | Dynamic Analytical Solutions
Lage currently supports NavAir in their development of the U.S. Navy Unmanned Combat Aerial System (UCAS) program, leading the development of the Relative GPS-based landing system, which will provide the highly accurate navigation required for the autonomous landing of an unmanned vehicle the size of a tactical fighter, loaded with fuel and weapons, on a moving aircraft carrier. She also serves as chief engineer for the demonstration of Automated Aerial Refueling (AAR) for application to unmanned aerial vehicles (UAVs). The AAR program uses integrated GPS/INS with carrier phase ambiguity resolution to provide a precise navigation solution with the required integrity and continuity to support refueling operations.
Carlo des Dorides
Head of Concession Division | Galileo Joint Undertaking
“I see two quite dense years ahead for the Galileo Project. The challenge is now to have the concession contract in force — financial close — within 2007. Indeed the choice to deploy Galileo adopting a project financing structure, namely a 20-year public-private partnership/concession, implies a complex contract negotiation to provide for balanced risk allocation, with the final objective to deliver the best value-for-money solution for the public sector. Certainly the Galileo project will represent a breakthrough not only in technology but also on the contractual paradigm at stake, which might disclose new frontiers to satellite programs and their exploitation objectives.”
Winston Guillory
Senior Vice President of Consumer & Business Sales | NAVTEQ
A global provider of digital map data for location-based services (LBS) and vehicle navigation, NAVTEQ powers more than 60 million sets of driving instructions per day. Guillory launched the NAVTEQ Global LBS Challenge (www.LBSChallenge.com) for application developers in 2004, at a time when many doubted the real potential of the long-forecast but slow-developing market. The Challenge has elicited several promising new applications entering the market today. Guillory plans to inaugurate an LBS Developers Conference this fall, following up with further programs and map content to drive the value chains’ continued momentum.
Christopher J. Hegarty
Director for Spectrum Management | Center for Advanced Aviation System Development | The MITRE Corporation
Co-editor of the second edition of standard reference text GPS Principles and Applications and a leading technical contributor to GPS and the Wide-Area Augmentation System (WAAS) in aviation, Hegarty will relinquish his role as editor since 1997 of NAVIGATION: Journal of The Institute of Navigation. He serves the Radio Technical Commission for Aeronautics (RTCA) as co-chair of Special Committee 159, Global Positioning System. “I expect to remain active advising the U.S. government on GPS and satellite-based augmentation system (SBAS) modernization, as well as the compatibility and interoperability of GPS with foreign systems including Galileo and GLONASS.”
Welcome to the second edition of GPS World’s Survey & Construction e-newsletter. My name is Eric Gakstatter ([email protected]). I’ve spent the past 16 years in the GPS survey/mapping industry using many brands of GPS equipment and software. My first ten years in GPS were spent as a product manager and the last six years as a GPS user and consultant. I’m a non-partisan advocate for the GPS user community.
This subject of this month’s column is L2C. It’s not just about vanilla GPS anymore. GPS modernization weighs heavily in future of satellite surveying. What does L2C bring to the table? When do the new features become useful enough to start making equipment purchasing decisions? While some of the answers may be obvious, others may surprise you.
First of all, I’ll preface this column by noting that L2C is only a small part of the Global Navigation Satellite System picture that includes L5, GPSIII, Glonass (Russia’s satellite system) and Galileo (Europe’s satellite system). Discussing all of the GNSS components is too much for one column so I’ll be chipping away at all of them in the coming months.
Last September (’05) was a big step for GPS modernization when the first IIR-M satellite was launched…starting the next phase of GPS with a second civilian signal (L2C). Currently, there is one civilian signal (L1 C/A). L2 was designed for military use…although civilian manufacturers have been very resourceful in developing codeless techniques for utilizing L2; therefore making dual frequency receivers (L1/L2) very useful for the user community.
Basically, L2C can be viewed as an add-on feature to the existing L2 band. In practical terms, L2C will help in two areas:
It will allow for user receivers to more accurately correct for the error that is generated when the GPS signal passes through the Earth’s ionosphere. L2C provides manufacturers with a new code, enabling them to address the ionospheric delay in a more direct manner than the codeless techniques used by today’s dual frequency receivers. It will also open the door for non survey-grade GPS manufacturers to design survey-grade dual frequency receivers at a much lower R&D cost with fewer patent blocks.
Contrary to popular belief, the L2C signal is weaker (not stronger) than L1 C/A code. The idea that L2C will “punch through the trees” with a stronger signal is incorrect. What L2C does offer is a more robust code structure with improved error-correcting methods that will allow it to be used more effectively in marginal satellite signal conditions than what we experience today. Just how much it will help will only be known when the satellite constellation is in place and the receivers are developed to optimize it.
These two enhancements will result in more competition in the survey-grade GPS receiver marketplace because survey-grade dual frequency receivers will be easier to design. With increased competition, it’s reasonable to expect more competitive prices. With L2C, you can also expect GPS to perform better in weaker satellite conditions.
With the benefits of L2C to the survey/mapping market clearly established, when are we going to be able to use it? Well, it’s going to be awhile. The publicized year of 2010 is not realistic as this point. Educated speculation says that 2012 is more likely. Don’t forget that it’s not just a matter of tossing satellites into orbit. There are control and management systems on the ground that need to be developed, tested and rolled-out to make use of the new signal. After the hype generated last September when the first IIR-M satellite was launched, the delays in the follow-up IIR-M launches have been disappointing. For example, the launch scheduled for 1Q 2006 has been pushed out until September…a full year after the first IIR-M.
From the launch schedule, you can see it’s a bit early to start making equipment purchasing decisions based on L2C. Yes, I think that manufacturers will do their best to exploit a partial constellation of L2C satellites and perhaps there will be some innovative
developments in that area, but just note that by the time there is a minimum constellation of L2C satellites in orbit, there will be another two or three generations of receivers that will have been introduced to the market.
I’m at the American Congress on Surveying and Mapping annual conference this week in Orlando. Look for my report on conference news in next month’s issue.
To initially acquire the GPS signals, a receiver also would have to search quickly through the much larger range of possible Doppler shifts and code delays than those experienced by a terrestrial receiver.
By William Bamford, Luke Winternitz and Curtis Hay
INNOVATION INSIGHTS by Richard Langley
GPS RECEIVERS have been used in space to position and navigate satellites and rockets for more than 20 years. They have also been used to supply accurate time to satellite payloads, to determine the attitude of satellites, and to profile the Earth’s atmosphere. And GPS can be used to position groups of satellites flying in formation to provide high-resolution ground images as well as small-scale spatial variations in atmospheric properties and gravity.
Receivers in low Earth orbit have virtually the same view of the GPS satellite constellation as receivers on the ground. But satellites orbiting at geostationary altitudes and higher have a severely limited view of the main beams of the GPS satellites. The main beams are either directed away from these high-altitude satellites or they are blocked to a large extent by the Earth.
Typically, not even four satellites can be seen by a conventional receiver. However, by using the much weaker signals emitted by the GPS satellite antenna side lobes, a receiver may be able track a sufficient number of satellites to position and navigate itself. To initially acquire the GPS signals, a receiver also would have to search quickly through the much larger range of possible Doppler shifts and code delays than those experienced by a terrestrial receiver.
In this month’s column, William Bamford, Luke Winternitz, and Curtis Hay discuss the architecture of a receiver with these needed capabilities — a receiver specially designed to function in high Earth orbit. They also describe a series of tests performed with a GPS signal simulator to validate the performance of the receiver here on the ground — well before it debuts in orbit.
“Innovation” is a regular column featuring discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by Richard Langley of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick, who appreciates receiving your comments and topic suggestions. To contact him, see the “Columnists” section in this issue.
Calculating a spacecraft’s precise location at high orbits — 22,000 miles (35,400 kilometers) and beyond — is an important and challenging problem. New and exciting opportunities become possible if satellites are able to autonomously determine their own orbits.
First, the repetitive task of periodically collecting range measurements from terrestrial antennas to high-altitude spacecraft becomes less important — this lessens competition for control facilities and saves money by reducing operational costs. Also, autonomous navigation at high orbital altitudes introduces the possibility of autonomous station-keeping. For example, if a geostationary satellite begins to drift outside of its designated slot, it can make orbit adjustments without requiring commands from the ground. Finally, precise onboard orbit determination opens the door to satellites flying in formation — an emerging concept for many scientific space applications.
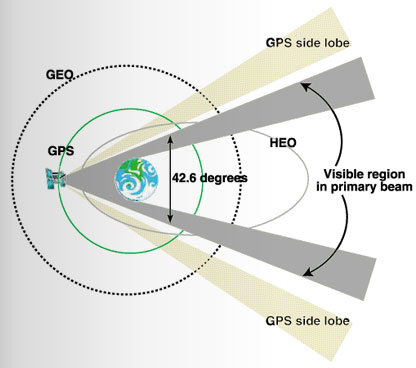
Realizing these benefits is not a trivial task. While the navigation signals broadcast by GPS satellites are well suited for orbit and attitude determination at lower altitudes, acquiring and using these signals at geostationary (GEO) and highly elliptical orbits (HEOs) is much more difficult. This situation is illustrated in FIGURE 1.
Figure 1. GPS signal reception at GEO and HEO orbital altitudes.
The light blue trace shows the GPS orbit at approximately 12,550 miles (20,200 kilometers) altitude. GPS satellites were designed to provide navigation signals to terrestrial users — because of this, the antenna array points directly toward the Earth. GEO and HEO orbits, however, are well above the operational GPS constellation, making signal reception at these altitudes more challenging. The nominal beamwidth of a Block II/IIA GPS satellite antenna array is approximately 42.6 degrees. At GEO and HEO altitudes, the Earth blocks most of these primary beam transmissions, leaving only a narrow region of nominal signal visibility near the limb of the Earth.This region is highlighted in gray.
If GPS receivers at GEO and HEO orbits were designed to use these higher power signals only, precise orbit determination would not be practical. Fortunately, the GPS satellite antenna array also produces side-lobe signals at much lower power levels. The National Aeronautics and Space Administration (NASA) has designed and tested the Navigator, a new GPS receiver that can acquire and track these weaker signals, dramatically increasing signal visibility at these altitudes.
While using much weaker signals is a fundamental requirement for a high orbital altitude GPS receiver, it is certainly not the only challenge. Other unique characteristics of this application must also be considered. For example, position dilution of precision (PDOP) figures are much higher at GEO and HEO altitudes because visible GPS satellites are concentrated in a much smaller region with respect to the spacecraft antenna. These poor PDOP values contribute considerable error to the point-position solutions calculated by the spacecraft GPS receiver.
Extreme Conditions. Finally, spacecraft GPS receivers must be designed to withstand a variety of extreme environmental conditions. Variations in acceleration between launch and booster separation are extreme. Temperature gradients in the space environment are also severe. Furthermore, radiation effects are a major concern — spaceborne GPS receivers should be designed with radiation-hardened parts to minimize damage caused by continuous exposure to low-energy radiation as well as damage and operational upsets from high-energy particles. Perhaps most importantly, we typically cannot repair or modify a spaceborne GPS receiver after launch. Great care must be taken to ensure all performance characteristics are analyzed before liftoff.
Motivation
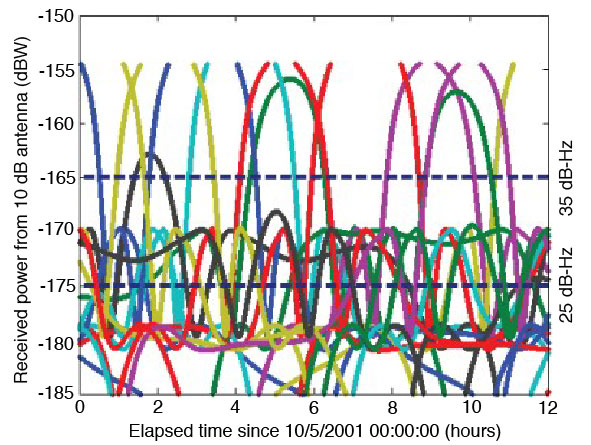
As mentioned earlier, for a GPS receiver to autonomously navigate at altitudes above the GPS constellation, its acquisition algorithm must be sensitive enough to pick up signals far below that of the standard space receiver. This concept is illustrated in FIGURE 2. The colored traces represent individual GPS satellite signals. The topmost dotted line represents the typical threshold of traditional receivers. It is evident that such a receiver would only be able to track a couple of the strong, main-lobe signals at any given time, and would have outages that can span several hours.
The lower dashed line represents the design sensitivity of the Navigator receiver. The 10 dB reduction allows Navigator to acquire and track the much weaker side-lobe signals. These side lobes augment the main lobes when available, and almost completely eliminate any GPS signal outages. This improved sensitivity is made possible by the specialized acquisition engine built into Navigator’s hardware.
Figure 2. Simulated received power at GEO orbital altitude.
Acquisition Engine
Signal acquisition is the first, and possibly most difficult, step in the GPS signal processing procedure. The acquisition task requires a search across a three-dimensional parameter space that spans the unknown time delay, Doppler shift, and the GPS satellite pseudorandom noise codes. In space applications, this search space can be extremely large, unless knowledge of the receiver’s position, velocity, current time, and the location of the desired GPS satellite are available beforehand.
Serial Search. The standard approach to this problem is to partition the unknown Doppler-delay space into a sufficiently fine grid and perform a brute force search over all possible grid points. Traditional receivers use a handful of tracking correlators to serially perform this search. Without sufficient information up front, this process can take 10–20 minutes in a low Earth orbit (LEO), or even terrestrial applications, and much longer in high-altitude space applications. This delay is due to the exceptionally large search space the receiver must hunt through and the inefficiency of serial search techniques.
Acquisition speed is relevant to the weak signal GPS problem, because acquiring weak signals requires the processing of long data records. As it turns out, using serial search methods (without prior knowledge) for weak signal acquisition results in prohibitively long acquisition times.
Many newer receivers have added specialized fast-acquisition capability. Some employ a large array of parallel correlators; others use a 32- to 128-point fast Fourier transform (FFT) method to efficiently resolve the frequency dimension. These methods can significantly reduce acquisition time. Another use of the FFT in GPS acquisition can be seen in FFT-correlator-based block-processing methods, which offer dramatically increased acquisition performance by searching the entire time-delay dimension at once. These methods are popular in software receivers, but because of their complexity, are not generally used in hardware receivers.
Exceptional Navigator. One exception is the Navigator receiver. It uses a highly specialized hardware acquisition engine designed around an FFT correlator. This engine can be thought of as more than 300,000 correlators working in parallel to search the entire Doppler-delay space for any given satellite. The module operates in two distinct modes: strong signal mode and weak signal mode. Strong signal mode processes a 1 millisecond data record and can acquire all signals above –160 dBW in just a few seconds. Weak signal mode has the ability to process arbitrarily long data records to acquire signals down to and below –175 dBW. At this level, 0.3 seconds of data are sufficient to reliably acquire a signal.
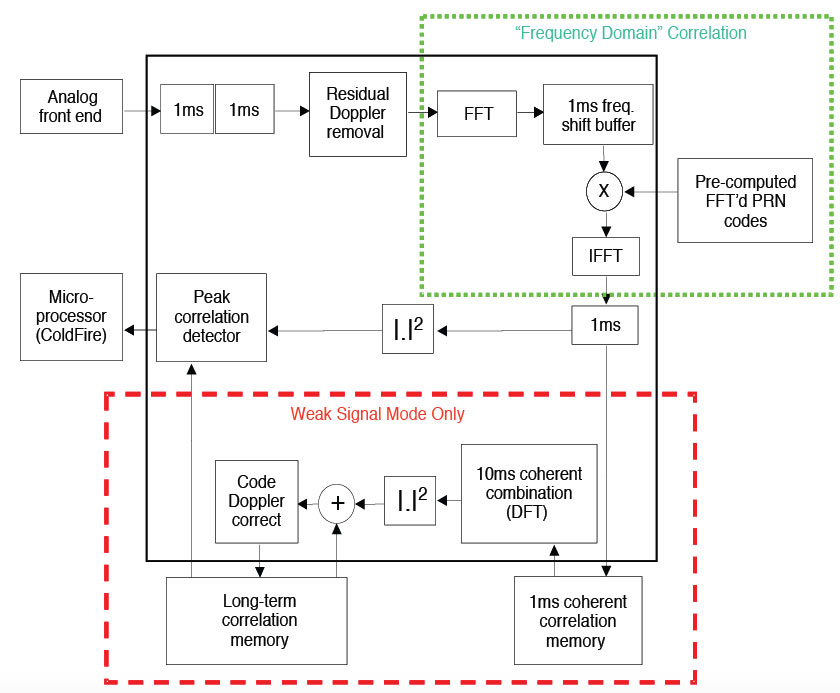
Additionally, because the strong, main-lobe, signals do not require the same sensitivity as the side-lobe signals, Navigator can vary the length of the data records, adjusting its sensitivity on the fly. Using essentially standard phase-lock-loop/delay-lock-loop tracking methods, Navigator is able to track signals down to approximately –175 dBW. When this tracking loop is combined with the acquisition engine, the result is the desired 10 dB sensitivity improvement over traditional receivers. FIGURE 3 illustrates Navigator’s acquisition engine.
Powered by this design, Navigator is able to rapidly acquire all GPS satellites in view, even with no prior information. In low Earth orbit, Navigator typically acquires all in-view satellites within one second, and has a position solution as soon as it has finished decoding the ephemeris from the incoming signal. In a GEO orbit, acquisition time is still typically under a minute.
Figure 3. Navigator signal acquisition engine.Navigator breadboard.GPS constellation simulator.
Navigator Hardware
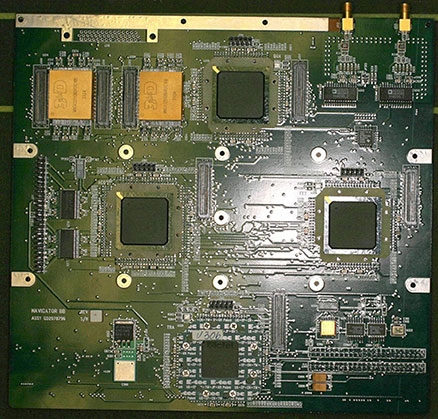
Outside this unique acquisition module, Navigator employs the traditional receiver architecture: a bank of hardware tracking correlators attached to an embedded microprocessor. Navigator’s GPS signal-processing hardware, including both the tracking correlators and the acquisition module, is implemented in radiation-hardened field programmable gate arrays (FPGAs). The use of FPGAs, rather than an application-specific integrated circuit, allows for rapid customization for the unique requirements of upcoming missions. For example, when the L2 civil signal is implemented in Navigator, it will only require an FPGA code change, not a board redesign.
The current Navigator breadboard—which, during operation, is mounted to a NASA-developed CPU card—is shown in the accompanying photo. The flight version employs a single card design and, as of the writing of this article, is in the board-layout phase. Flight-ready cards will be delivered in October 2006.
Integrated Navigation Filter
Even with its acquisition engine and increased sensitivity, Navigator isn’t always able to acquire the four satellites needed for a point solution at GEO altitudes and above. To overcome this, the GPS Enhanced Onboard Navigation System (GEONS) has been integrated into the receiver software. GEONS is a powerful extended Kalman filter with a small package size, ideal for flight-software integration. This filter makes use of its internal orbital dynamics model in conjunction with incoming measurements to generate a smooth solution, even if fewer than four GPS satellites are in view.
The GEONS filter combines its high-fidelity orbital dynamics model with the incoming measurements to produce a smoother solution than the standard GPS point solution. Also, GEONS is able to generate state estimates with any number of visible satellites, and can provide state estimation even during complete GPS coverage outages.
Hardware Test Setup
We used an external, high-fidelity orbit propagator to generate a two-day GEO trajectory, which we then used as input for the Spirent STR4760 GPS simulator. This equipment, shown in the accompanying photo, combines the receiver’s true state with its current knowledge of the simulated GPS constellation to generate the appropriate radio frequency (RF) signals as they would appear to the receiver’s antenna. Since there is no physical antenna, the Spirent SimGEN software package provides the capability to model one.
The Navigator receiver begins from a cold start, with no advance knowledge of its position, the position of the GPS satellites, or the current time. Despite this lack of information, Navigator typically acquires its first satellites within a minute, and often has its first position solution within a few minutes, depending on the number of GPS satellites in view. Once a position solution has been generated, the receiver initializes the GEONS navigation filter and provides it with measurements on a regular, user-defined basis. The Navigator point solution is output through a high-speed data acquisition card, and the GEONS state estimates, covariance, and measurement residuals are exported through a serial connection for use in data analysis and post-processing.
We configured the GPS simulator to model the receiving antenna as a hemispherical antenna with a 135-degree field-of-view and 4 dB of received gain, though this antenna would not be optimal for the GEO case. Assuming a nadir-pointing antenna, all GPS signals are received within a 40-degree angle with respect to the bore sight. Furthermore, no signals arrive from between 0 and 23 degrees elevation angle because the Earth obstructs this range. An optimal GEO antenna (possibly a high-gain array) would push all of the gain into the feasible elevation angles for signal reception, which would greatly improve signal visibility for Navigator (a traditional receiver would still not see the side lobes). Nonetheless, the following results provide an important baseline and demonstrate that a high-gain antenna, which would increase size and cost of the receiver, may not be necessary with Navigator. The GPS satellite transmitter gain patterns were set to model the Block II/IIA L1 reference gain pattern.
Simulation Results
To validate the receiver designs, we ran several tests using the configuration described above. The following section describes the results from a subset of these tests.
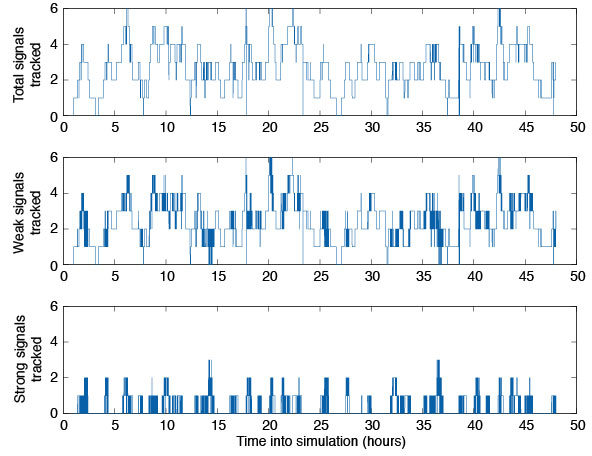
Tracked Satellites. The top plot of FIGURE 4 illustrates the total number of satellites tracked by the Navigator receiver during a two-day run with the hemispherical antenna. On average, Navigator tracked between three and four satellites over the simulation period, but at times as many as six and as few as zero were tracked. The middle pane depicts the number of weak signals tracked—signals with received carrier-to-noise-density ratio of 30 dB-Hz or less. The bottom panel shows how many satellites a typical space receiver would pick up. It is evident that Navigator can track two to three times as many satellites at GEO as a typical receiver, but that most of these signals are weak.
Figure 4. Number of satellites tracked in GEO simulation.
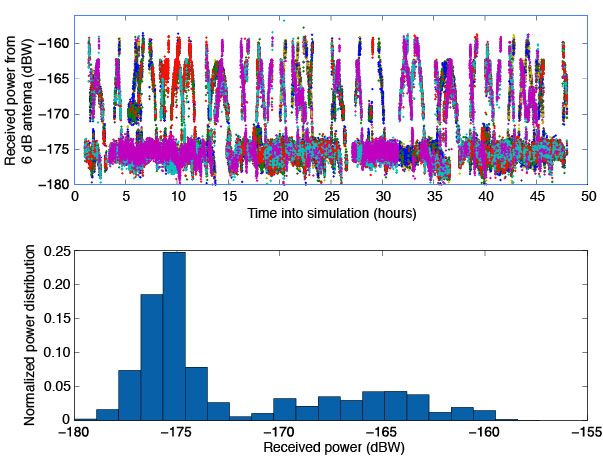
Acquisition Thresholds. The received power of the signals tracked with the hemispherical antenna is plotted in the top half of FIGURE 5. The lowest power level recorded was approximately –178 dBW, 3 dBW below the design goal. (Note the difference in scale from Figure 1, which assumed an additional 6 dB of antenna gain.) The bottom half of Figure 5 shows a histogram of the tracked signals. It is clear that most of the signals tracked by Navigator had received power levels around –175 dBW, or 10 dBW weaker than a traditional receiver’s acquisition threshold.
Figure 5. Signal tracking data from GEO simulation.
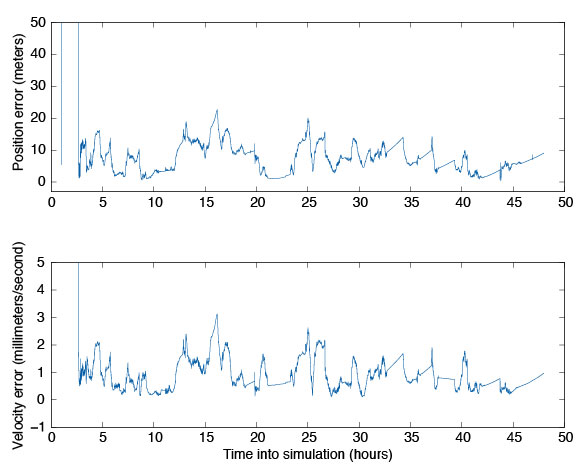
Navigation Filter. To validate the integration of the GEONS software, we compared its estimated states to the true states over the two-day period. These results are plotted in FIGURE 6. For this simulation, we assumed that GPS satellite clock and ephemeris errors could be corrected by applying NASA’s Global Differential GPS System corrections, and errors caused by the ionosphere could be removed by masking signals that passed close to the Earth’s limb. The truth environment consisted of a 70X70 degree-and-order gravity model and sun-and-moon gravitational effects, as well as drag and solar-radiation pressure forces. GEONS internally modeled a 10X10 gravity field, solar and lunar gravitational forces, and estimated corrections to drag and solar-radiation pressure parameters. (Note that drag is not a significant error source at these altitudes.) Though the receiver produces pseudorange, carrier-phase, and Doppler measurements, only the pseudorange measurement is being processed in GEONS.
Figure 6. GEONS state estimation errors for GEO simulation.
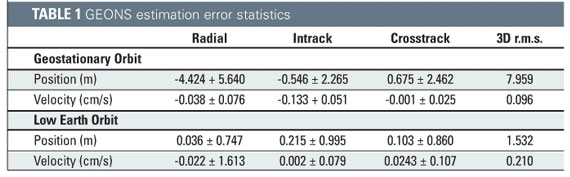
The results, compiled in TABLE 1, show that the 3D root mean square (r.m.s.) of the position error was less than 10 meters after the filter converges. The velocity estimation agreed very well with the truth, exhibiting less than 1 millimeter per second of three-dimensional error. Navigator can provide excellent GPS navigation data at low Earth orbit as well, with the added benefit of near instantaneous cold-start signal acquisition. For completeness, the low Earth orbit results are included in Table 1.
Navigator’s Future
Navigator’s unique features have attracted the attention of several NASA projects. In 2007, Navigator is scheduled to launch onboard the Space Shuttle as part of the Hubble Space Telescope Servicing Mission 4: Relative Navigation Sensor (RNS) experiment. Additionally, the Navigator/GEONS technology is being considered as a critical navigational instrument on the new Geostationary Operational Environmental Satellites (GOES-R).
In another project, the Navigator receiver is being mated with the Intersatellite Ranging and Alarm System (IRAS) as a candidate absolute/relative state sensor for the Magnetospheric Multi-Scale Mission (MMS). This mission will transition between several high-altitude highly elliptical orbits that stretch well beyond GEO. Initial investigations and simulations using the Spirent simulator have shown that Navigator/GEONS can easily meet the mission’s positioning requirements, where other receivers would certainly fail.
Conclusion
NASA’s Goddard Space Flight Center has conducted extensive test and evaluation of the Navigator GPS receiver and GEONS orbit determination filter. Test results, including data from RF signal simulation, indicate the receiver has been designed properly to autonomously calculate precise orbital information at altitudes of GEO and beyond. This is a remarkable accomplishment, given the weak GPS satellite signals observed at these altitudes. The GEONS filter is able to use the measurements provided by the Navigator receiver to calculate precise orbits to within 10 meters 3D r.m.s. Actual flight test data from future missions including the Space Shuttle RNS experiment will provide further performance characteristics of this equipment, from which its suitability for higher orbit missions such as GOES-R and MMS can be confirmed.
Manufacturers
The Navigator receiver was designed by the NASA Goddard Space Flight Center Components and Hardware Systems Branch (Code 596) with support from various contractors. The 12-channel STR4760 RF GPS signal simulator was manufactured by Spirent Communications (www.spirentcom.com).
FURTHER READING
1. Navigator GPS receiver
“Navigator GPS Receiver for Fast Acquisition and Weak Signal Tracking Space Applications” by L. Winternitz, M. Moreau, G. Boegner, and S. Sirotzky, in Proceedings of ION GNSS 2004, the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation, Long Beach, California, September 21–24, 2004, pp. 1013-1026.
“Real-Time Geostationary Orbit Determination Using the Navigator GPS Receiver” by W. Bamford, L. Winternitz, and M. Moreau in Proceedings of NASA 2005 Flight Mechanics Symposium, Greenbelt, Maryland, October 18–20, 2005 (in press). A pre-publication version of the paper is available online at http://www.emergentspace.com/pubs/Final_GEO_copy.pdf.
1. GPS on high-altitude spacecraft
“The View from Above: GPS on High Altitude Spacecraft” by T.D. Powell in GPS World, Vol. 10, No. 10, October 1999, pp. 54–64.
“Autonomous Navigation Improvements for High-Earth Orbiters Using GPS” by A. Long, D. Kelbel, T. Lee, J. Garrison, and J.R. Carpenter, paper no. MS00/13 in Proceedings of the 15th International Symposium on Spaceflight Dynamics, Toulouse, June 26–30, 2000. Available online at http://geons.gsfc.nasa.giv/library_docs/ISSFDHEO2.pdf.
1. GPS for spacecraft formation flying
“Autonomous Relative Navigation for Formation-Flying Satellites Using GPS” by C. Gramling, J.R. Carpenter, A. Long, D. Kelbel, and T. Lee, paper MS00/18 in Proceedings of the 15th International Symposium on Spaceflight Dynamics, Toulouse, June 26–30, 2000. Available online at http://geons.gsfc.nasa.giv/library_docs/ISSFDrelnavfinal.pdf.
“Formation Flight in Space: Distributed Spacecraft Systems Develop New GPS Capabilities” by J. Leitner, F. Bauer, D. Folta, M. Moreau, R. Carpenter, and J. How in GPS World, Vol. 13, No. 2, February 2002, pp. 22–31.
1. Fourier transform techniques in GPS receiver design
“Block Acquisition of Weak GPS Signals in a Software Receiver” by M.L. Psiaki in Proceedings of ION GPS 2001, the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation, Salt Lake City, Utah, September 11–14, 2001, pp. 2838–2850.
1. Testing GPS receivers before flight
“Pre-Flight Testing of Spaceborne GPS Receivers Using a GPS Constellation Simulator” by S. Kizhner, E. Davis, and R. Alonso in Proceedings of ION GPS-99, the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, Tennessee, September 14–17, 1999, pp. 2313–2323.
BILL BAMFORD is an aerospace engineer for Emergent Space Technology, Inc., in Greenbelt, Maryland. He earned a Ph.D. from the University of Texas at Austin in 2004, where he worked on precise formation flying using GPS as the primary navigation sensor. As an Emergent employee, he has worked on the development of the Navigator receiver and helped support and advance the NASA Goddard Space Flight Center’s Formation Flying Testbed. He can be reached at [email protected].
LUKE WINTERNITZ is an electrical engineer in hardware components and systems at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. He has worked at Goddard for three years primarily in the development of GPS receiver technology. He received bachelor’s degrees in electrical engineering and mathematics from the University of Maryland, College Park, in 2001 and is a part-time graduate student there pursuing a Ph.D. He can be reached at [email protected].
CURTIS HAY served as an officer in the United States Air Force for eight years in a variety of GPS-related assignments. He conducted antijam GPS R&D for precision weapons and managed the GPS Accuracy Improvement Initiative for the control segment. After separating from active duty, he served as the lead GPS systems engineer for OnStar. He is now a systems engineer for Spirent Federal Systems in Yorba Linda, California, a supplier of high-performance GPS test equipment. He can be reached at [email protected].
The FAA’s announcement (reported in March GPS World) that WAAS in the northeastern United States and eastern Canada may be significantly inhibited by relocation of WAAS-broadcasting satellite AOR-W before the new PanAmSat becomes fully operational in fall 2006 caused unease in some surveying organizations. Based on tests completed last year, before anyone knew that AOR-W would relocate to 142W longitude, these organizations replaced legacy GPS mapping units using post-processing and the Coast Guard NDGPS with high-performance WAAS-enabled mapping receivers.
The FAA notice doesn’t tell the full story, however. Two new WAAS broadcasting satellites launched last fall. PanAmSat (133W) began broadcasting in test mode with corrections full-time this March, and Telesat (107W) is scheduled to begin the same mode on or around April 1, 2006. The FAA announcement does not take into account either of these broadcasting satellites.
If these test signals are considered, there will be no degradation in WAAS visibility. In fact, users in the northeastern United States and eastern Canada will enjoy dual WAAS satellite coverage. WAAS satellite visibility in central and western North America has improved in the past 60 days with the new test signals and relocation of AOR-W.
However, the FAA won’t certify the accuracy/reliability of the new satellites until after extensive testing. Until then, non-aviation receivers may use the signals at their discretion —the same mode WAAS operated in prior to its July 2003 commissioning. Also, non-aviation WAAS receivers may not be configured to use the new test signals; check with the manufacturer.
— Eric Gakstatter, Editor of GPS World’s new Survey & Construction E-Newsletter
Hello, and welcome to the first issue of GPS World’s Survey & Construction Newsletter. You are encouraged to forward this email to your colleagues, and they in turn are encouraged to sign up for their own — free — subscription.
I’m Eric Gakstatter ([email protected]), your editor on this resource for the survey and construction communities. I’ve spent the past 16 years in the GPS survey/mapping industry using many brands of GPS equipment and software. My first ten years in GPS were spent as a product manager and the last six years as a GPS user and consultant. I’m a non-partisan advocate for the GPS user community.
The first subject I’ve selected to discuss with you is the FAA’s WAAS program because of the recent and significant changes that have taken place in this program.
WAAS UP?
WAAS is one of the most widely misunderstood GPS technologies of today in the survey/mapping marketplace. Recent WAAS broadcasting satellite launches and a WAAS broadcasting satellite relocation along with vague press releases have further muddied the waters. In the interest of panic-relief for survey/mapping WAAS users, a more prudent, in-depth explanation is warranted.
Recently, I was on a construction site for a project I’m involved with. It was a park-like setting with a lot of drainage and irrigation being laid. From the beginning, I knew the job superintendent was very comfortable with technology. The younger, lean fellow spoke efficiently, carried a laptop and seemed on top of his game when questioned by various owner’s reps and sub-contractors….he even carried a hand-held GPS mapping receiver that he used to map various structures installed throughout the project.
Of course, I had to talk with him about his thoughts and perceptions of GPS. A part of the conversation went as follows:
Me: How accurate has that unit been for you?
Him: Very accurate. Do you see that little airplane on the screen (he points at the screen)?
Me (looking at his screen and trying to figure out what he’s talking about): Oh, yes.
Him: That means there’s an AWACS airplane flying near here sending me corrections. You know, the military airplane with the big antenna on it?
I sighed deeply as the image my mind had built of this young, high-tech construction superintendent faded away.
That “little airplane” on the screen he was referring to was an indicator that his GPS receiver was using corrections from a Federal Aviation Administration (FAA) Wide Area Augmentation System (WAAS) satellite.
WAAS is perhaps one of the most widely misunderstood GPS technologies of today in the survey/mapping marketplace and the above conversation is a typical example.
Further complicating this is the recent announcement by the FAA that WAAS in the northeastern US and Eastern Canada may be significantly affected by the relocation of AOR-W (the US east coast WAAS broadcasting satellite) before the new PanAmSat will be considered fully operational in Fall 2006. See the FAA announcement at http://gps.faa.gov/programs/waas/non-aviationUsers.htm.
The FAA announcement set off a panic in some organizations that had recently implemented a significant number of high performance, WAAS-enabled mapping receivers to replace legacy GPS mapping units that used post-processing and the Coast Guard NDGPS system. These organizations based their decisions on performance tests completed last year before anyone knew that AOR-W was going to relocate to 142W longitude instead of 98W longitude as originally announced.
The rest of the story…
First of all, two new WAAS broadcasting satellites were launched last Fall. One of them (PanAmSat at 133W longitude) began broadcasting in test mode with corrections full-time this month (March). It is expected that the other (Telesat at 107W longitude) is scheduled to begin broadcasting test mode with corrections full-time on or around April 1, 2006. The FAA announcement does not take into account either of these broadcasting satellites.
If these test signals are considered, there will be no degradation in WAAS visibility. In fact, users in the Northeastern US and Eastern Canada will enjoy dual WAAS satellite coverage. For example, in Montreal, Quebec the two new WAAS broadcasting satellites will be visible at ~28 degrees and ~12 degrees above the horizon. Before the AOR-W relocation, it was the only WAAS satellite visible and it was at ~36 degrees above the horizon.
WAAS satellite visibility in the central and western US, Mexico and western Canada has improved dramatically in the past 60 days with the new test signals and relocation of AOR-W. For example, in Portland, Oregon, WAAS satellite POR is visible at ~12 degrees above the horizon. The two new WAAS broadcasting satellites and relocation of AOR-W to 142 degrees west longitude now means that three additional WAAS satellites will be visible at ~32 degrees, ~36 degrees, and ~35 degrees above the horizon in the Pacific Northwest.
The caveat is that the FAA won’t certify the accuracy/reliability of the new WAAS broadcasting satellites for quite some time after extensive testing. Until that time, non-aviation receivers are free to use the test mode signals at their discretion. This is the same mode that WAAS was operating in prior to it’s July 2003 commissioning. Also, your non-aviation WAAS receiver may or may not be configured to use the new test signals. You should check with the manufacturer of your unit.
Well, I didn’t have the heart to tell him then there weren’t any AWACS airplanes sending him corrections (although I did tell him later). It’s just one more example I’ve encountered of the misinformation floating around about WAAS among survey/mapping professionals. There is not enough space in this issue to debate the advantages/disadvantages of WAAS for survey/mapping usage, but don’t be so quick to dismiss the technology before you fully investigate it’s performance and consider the recent developments.
By Javad Ashjaee, President & CEO, Javad Navigation Systems
The launch of the Galileo test satellite marks another very significant and exciting day in the history of navigation. Just as competition between GPS manufacturers rapidly enhanced technology and performance, the competition between the constellation providers should do the same.
In 1984 a high-end GPS receiver weighed more than 100 pounds, performed poorly, was very difficult to operate, and came with a price tag of about $200,000. Thanks to competition, a high-end GPS receiver now weighs less than one pound, performs significantly better and with greater ease, and costs less than $5,000.
The benefits of the competition Galileo will bring are already apparent. I believe that the Galileo project had a significant role in removing Selective Availability (SA) from the GPS signal, or at least expedited it. In fact, the removal of SA was announced at the first conference discussing Galileo. The Galileo project also proved to be a positive influence on the GPS modernization project and encouraged faster development of GLONASS satellites.
Undoubtedly, competing with GPS was the main reason and force behind the creation of GLONASS. GLONASS, in turn, helped the removal of SA from GPS and encouraged the Galileo project. With Galileo, history may very well repeat itself.
Galileo Advantages. Galileo has several advantages over its historical counterparts. Galileo benefits from more than 30 years of experience with GPS and 20 years with GLONASS. It should be, and most probably will be, more advanced than GPS and GLONASS from the get go. Galileo also has the luxury of international support in general and that of U.S. GPS officials in particular. In contrast, GLONASS was a project of the Cold War and was, at best, ignored by the West. I witnessed current U.S. support for GLONASS, however, a few months ago when coordinating the meeting between U.S. Department of Defense and Russian officials to discuss common GPS and GLONASS signals. With a solid support system and history on its side, Galileo has a promising future.
That is not to say that Galileo goes unchallenged. GPS and GLONASS started mostly as military projects. The two recent wars clearly demonstrated the significance of such navigation systems as an essential military component, forcing military powerhouses to compete further and faster. Galileo’ motivation, however, is partly military, partly commercial, and partly pride. Satisfying the commercial motivation is a factor that, in my opinion, could hinder the timely progress and success of Galileo. The one-country support of GPS and GLONASS seems to have expedited the decision-making process. Galileo has scattered decision-making centers but seems to be resolving this disadvantage quickly.
Galileo Opportunities. From the technical side, I do not see any fundamental problem for the interoperability of GPS, GLONASS, and Galileo. GPS and GLONASS signal structure differences are much more drastic than those of GPS and Galileo. Yet we were able to circumvent GPS-GLONASS technical issues relatively easily. The amazing opportunity is the fact that, with Galileo on the horizon, all existing receivers will be obsolete in a few years, and the challenge of competing to make the best user equipment is enormous. I am excited to begin this new round of competition as soon as technical issues and specifications are finalized.
The competitive, historical, and technical aspects of Galileo help create the face of the future of navigation. GPS is already an established system. It will continue to improve and serve as the backbone of navigation systems for many years to come. GLONASS, too, is halfway there. Russia has strong motivation to complete and support it, and with the price of oil at the current level, it will prove to be a strong competitor sooner than we may think. The recent launch of three GLONASS satellites is a good signal. Galileo is starting solidly. Will China create a fourth navigation system? It has the need to support its military operation and markets and has the financial might to pay for it. I cannot imagine a fifth system, at least not in this century. Multiple navigation systems operating independently help increase public awareness and confidence and open and expand markets quickly.
A key factor in the success of GPS was the cooperation between GPS authorities and manufacturers. Technical details were readily available to all GPS manufacturers worldwide. In 1983, during development of the first generation of GPS receivers at Trimble, I had daily phone conversations with then Captain Karl Kovach at the GPS Control Segment to ask questions and give him feedback on GPS satellite performances that I was observing. Availability of cost-effective high-quality receivers brings the fruits of the system to the world.
A gentleman from a GLONASS-related institute recently described the status of GLONASS as “ constellation of 14 satellites and many thousands of Javad receivers.” Generously giving me credit for my past activities, he also pointed to the importance of open, unbiased cooperation within industry. I hope Galileo’ commercial structure and objectives allow all of us to compete to develop user equipments of the highest quality and lowest cost.
For the recent launches of Galileo and three GLONASS satellites, congratulations to all of us civilian users!
The Defense Science Board recently released the long-awaited report of its Task Force on the Future of the Global Positioning System. The Task Force conducted its deliberations during the latter half of 2004 and early 2005, a period of significant behind-the-scenes activity bearing on GPS. These activities included international negotiations and agreement, national policy discussions on GPS management, and considerations affecting GPS governance. After a lengthy Department of Defense internal review process, the report was approved for public release in October.
The Task Force itself represented a remarkable confluence of talent, including experts in GPS design, in military, civilian, and scientific applications of GPS, and in the inner workings of military, government, and industry operations. The insights and guidance of its co-chairs, Dr. James Schlesinger and Dr. Robert Hermann, with their unique combination of experience and personal credibility, lent enormous gravity to the undertaking. Their product illuminates in many ways the critical role GPS plays in our world. As an opening premise, proved throughout the report, it notes that “GPS is vital to the United States and to the DoD because, as a fundamental information system, it provides a common thread of precise position and time throughout our national security and economic infrastructures.”
One can remember many previous boards and committees that issued recommendations for GPS, and may have built a semblance of awareness but didn’t lead to tangible action. The result, noted from the beginning by the co-chairs, was that the apparently healthy GPS program wasn’t really all that healthy and that the malaise affected virtually all aspects of the program. They urged and the Task Force responded with discussion and findings specifically intended to be actionable and to address the underlying causes of the malaise, which are rooted in long-standing institutional factors that will require reinvigorated leadership and persistent follow-up to correct.
The Task Force noted a general lack of awareness of GPS role in the national infrastructure on the part of senior leaders in all areas of government. Although many people are aware of narrow aspects of GPS performance in individual applications, very few are truly aware of the breadth of GPS contributions to the national security and economy, nor of the enabling effects GPS has on critical national infrastructures. The Task Force viewed raising that awareness level among the nation’s senior leadership as key to addressing some of the other problems facing the program. Many of the other problems derive from lack of or misplaced management attention that allowed the components of the system to become unsynchronized.
Unbalanced attention to satellites at the expense of operational control functions and user equipment, annual diversion of funding from GPS to other programs, and delays among all the services in programming funds to equip military forces with improved user equipment are all symptoms of incomplete understanding of the role of GPS in military missions in general. Delays in making new signal capabilities available to users and reluctance to incorporate civil information sources into GPS constellation management are symptoms of incomplete understanding of the role of GPS in domestic and international civil infrastructures. Dilution of and uncertainty about policy and operational authority and responsibility for GPS are symptoms of insufficient appreciation among the most senior leaders for the critical importance stable, coherent policies and clear lines of communication represent to the consistent operation of GPS as a national resource and international utility.
This was a full slate of weighty issues, and the Task Force members addressed each in their discussions and findings. The report of their efforts has now been published (www.acq.osd.mil/dsb/reports/2005-10-GPS_Report_Final.pdf) and is being briefed at the highest levels of the Defense Department and in other government offices.
The recommendations it contains can serve as a prescription to make the Global Positioning System more healthy, robust, and vibrant for all of its military and civilian users and applications around the world. But the prescription will only be effective if the report’s messages are received, understood, accepted, and acted upon by those charged with the responsibility to maintain GPS viability. One cannot overemphasize the importance of firm and systematic implementation of the recommendations coupled with focused, dedicated, and persistent follow-up. Otherwise, this uniquely capable and credible Task Force will have seen its efforts wasted and its findings will become just another report.
Given the undeniable importance of GPS to both the national and international security and economy, that would be a monumental tragedy.
Jules G. McNeff served for several years in the Office of the Assistant Secretary of Defense and was responsible for DoD navigation systems policy and overall management and oversight of the GPS program. He subsequently worked at SAIC and NASA before joining Overlook Systems Technologies as vice president for strategies and programs. He became a charter member of the Editorial Advisory Board of GPS World in 1990.
Defense Science Board Report — More Changes Called for in “ Future of GPS”
“ importance of consistent, persistent, tenacious leadership (Real Leadership with a capital L) . . . underpins the report and comes out in the discussions and recommendations regarding governance and responsibility.”
The Defense Science Board (DSB), an independent federal advisory committee to the U.S. Department of Defense, has released its task force report evaluating the state of the Global Position System and recommending substantial changes in the ongoing modernization program. Completed on October 28, “ Future of the Global Positioning System” was made available publicly on November 22. While much of the 109-page document (downloadable at www.acq.osd.mil/dsb/reports/2005-10-GPS_Report_Final.pdf) deals with technical aspects of GPS modernization, its most profound and potentially far-reaching changes deal with governance and leadership.
This comes at a timely juncture, as the U.S. Air Force weighs risks and benefits of breaking the GPS III next-generation effort into separate space and control segment contracts. But the report will roil the already-turbulent waters — it has already — as it urges deeper re-examination and more radical changes to tenets that may previously have been held unshakable. It furthers sounds a ringing alarm on the unhealthy and vulnerable state of the satellite constellation and the overall system.
Notwithstanding the Presidential National Security Policy Directive on Space-Based Positioning, Navigation, and Time (PNT) of December 2004, replacing the Interagency GPS Executive Board with a higher-level National Space-Based PNT Executive Committee, the DSB task force declares that substantial gaps in program oversight, direction, commitment, and funding persist under this makeover. The report’ executive summary states that “ far, the U.S. government has not made use of a comprehensive strategy accounting for all the national equities at stake in the resolution of issues affecting acquisition and operation.”
One knowledgeable observer with a long history of program involvement opined “ cannot overemphasize the importance of consistent, persistent, tenacious leadership (Real Leadership with a capital L) that is knowledgeable and aware of the capabilities and contributions of GPS and willing to take a personal stake in actually fixing the problems identified in the report, not just talking about them. That includes policy Leadership at OSD and operational Leadership exercised through STRATCOM to ensure the best possible GPS service is provided to all end users. That idea underpins the report and comes out in the discussions and recommendations regarding governance and responsibility, but somewhat muted, unfortunately.”
Background
Chartered in April 2004, the DSB task force on GPS had as its first assignment a recommendation on U.S. government response to the development of Galileo by the European Union (EU). Upon the signing of the EU/U.S. agreement on Galileo and GPS in June 2004, the group expanded its scope to take on a full-scale review of GPS program status, future direction, and needs.
The task force was led by co-chairs James R. Schlesinger, a former secretary of defense, secretary of energy, and director of the Central Intelligence Agency, and Robert J. Hermann, a former deputy assistant secretary of defense for communications, command, control and intelligence, former assistant secretary of the Air Force for research, development and logistics, and former director of the National Reconnaissance Office. Ray Swider, Assistant for GPS, Positioning and Navigation in the DoD (and author of the Directions essay “ GNSS Become a Reality?” in last month’ issue of this magazine) served as executive director for the task force.
Control Segment
The task force believes the GPS Operational Control Segment (OCS) “ been seriously neglected” in recent years as acquisition attention has focused on GPS satellites and signal structure. OCS consists of a software-intensive Master Control Station (MCS) at Schriever Air Force Base, connected to a global network of monitor stations and uplink antennas. With a number of delivery delays, contractor changeovers, and incompletely addressed problems in system software since the early 1990s, the report finds that OCS “ operates with a combination of commercial off-the-shelf (COTS) and uniquely modified COTS products that are minimally adequate for maintaining system integrity.”
Compounding these chronic software problems, “ Force Space Command has routinely deferred equipment maintenance and modernization of the monitor stations and ground antennas.” The Air Force recently terminated work for new software version necessary for operation of new L2C, L5, and M-code signals onboard the Block IIR-M and IIF satellites, and, eventually, L1C. In the face of these continuing OCS development problems, the task force calls for a “short-term workaround” and “ it essential that new signals be activated on launch of each Block IIR-M and Block IIF satellite and made available at the users’ risk for testing and other applications, even if they cannot be declared operational until sometime in the near future.”
Attempting to engineer a solution to the long-standing OCS development problems, the report calls for parallel development of OCS functionality based on layered control engineering principles with clearly defined application programming interfaces between software components, “ than the current heavily patched software engineering methodology that has proven unworkable.”
Finally, “ ability of the control segment to absorb further new requirements and implement additional operational changes is non-existent within current resources. The Task Force believes new approaches are necessary as soon as possible to enable consistent and timely operation of improved in-space capabilities. In this regard, the Air Force should also reevaluate the practice of a totally blue-suit operation at the MCS.” Specifically, the authors want contractor technical personnel selectively integrated into positions involving direct satellite system monitoring and command execution. While mitigating the disruptions caused by personnel turnover that are chronic within the armed forces and providing a long-term, experienced cadre of GPS operators, this “” bring the side benefit of reduced cost.
Anti-Jam
The DSB report examines current and planned anti-jam capabilities and makes detailed technical recommendations for new and interim measures that are beyond the scope of this news story. GPS World will publish an in-depth examination of these aspects in an upcoming issue. Briefly, although improved anti-jamming capabilities are scheduled for GPS III (the first GPS III spacecraft is scheduled for launch in 2013, a date already moved back more than once), the task force believes those efforts may be insufficient to counter existing threats, particularly if further delays in GPS III occur. “ risk in the GPS III program is real and its extended procurement schedule leaves an intolerable window for jamming vulnerability.” The reports wants new anti-jam enhancements installed as soon as possible in military receivers to reduce this risk, and repeatedly states that anti-jam solutions are known, but implementation lags need.
Constellation Shortfall
In a radical revamping of the space segment, the report recommends switching from a six-orbital-plane structure to one of three orbital planes of 10 satellites per plane, stating that at least this many is necessary in order to create enough coverage to support ground operations and sustain the overall constellation. To reconfigure thusly, the authors state that the shift to a three-plane constellation must occur before any next-generation satellites are launched — that is, not waiting for the GPS III launches. The task force further recommends two next-generation satellites be launched at a time on a medium-class launch vehicle, to keep costs and weight down.
Galileo’ schema calls for this same three-plane configuration, and the DSB report reminds readers that “ original GPS constellation design was a three-plane configuration; the six plane design was only adopted when the satellite count dropped to 18 and coverage had to be spread more thinly.”
Currently, there are 28 satellites in orbit, but with failures, the report states the constellation likely will fall closer to 24 satellites in the 2007-2012 time period, and that the Air Force only has committed to maintaining 24 satellites in the long term. According to the report, there are eight GPS IIR-M satellites and 19 GPS IIF satellites in the pipeline — although only 12 IIFs are on contract, not 19 — and the report uses the 19-satellite figure to calculate potential satellite shortfall.
A knowledgeable source from industry stated “ agree with the vast majority of the report, though I can certainly quibble over technicalities of the three-plane option, which is really driven by dual manifest [the launching of two satellites on one rocket]. This has been trade-studied to death in the past. Short of a breakthrough or a major decrease in capability (and this does not coincide with additional signal strength or spot beam, much less benefit cost and schedule), it will not happen.”
Too Heavy. The task force believes the secondary payloads envisioned for GPS III are not affordable in terms of cost and weight, and calls for their re-evaluation.
“ the satellite exceeds weight or power thresholds that would compromise dual-manifest (maintain sufficient margin for each through development), the removal of secondary payloads must be evaluated. In this instance, NDS mission modifications and alternatives must be explored.”
Further “ regional signal (broader beam) should be considered as a lighter-weight and less complex alternative to the narrow spot beam planned for GPS III.”
One of the more intriguing proposals in the DSB report calls for a sort of hybrid constellation, though details were not provided.
“ a part of the acquisition strategy for GPS III, include the option to procure higher power earth-coverage satellites without non-GPS payloads to permit operation of a mixed constellation of higher-cost, high functionality satellites and lower-cost, utility satellites, increasing signal robustness and availability while lowering overall constellation life cycle costs. This will also provide significant global mitigation for GPS against both intentional and unintentional interference.”
Regarding Galileo
In its focus on challenges within the GPS program, the task force does not forget its original assignment, to evaluate the European satellite navigation program and recommend responses to it. The authors urge the government to “ open” to the nascent system and to opportunities for cooperation. Specifically, to “ promote true civil interoperability — well defined geodetic and time transformations that can be easily implemented in user equipment,” and, critically, to “ on full disclosure of the open signal structure.”
Organization and Governance
In its executive summary, the DSB report calls out these issues, which it then addresses in the body of the report and makes the focus of its perhaps most telling recommendations:
· GPS serves broad and crucial national purposes
· Perception of military dominance in governance
· Need to assess viability of alternative governance structures
· Comprehensive national strategy has been lacking
· Responsibilities and authorities for GPS in DoD need clarification.
While many of the specifics of the recommendations that close out the report dive into layers of bureaucratic administration, the report authors clearly signal that, even with last winter’ elevation of GPS oversight to the deputy secretary level with establishment of the National Space-Based PNT Executive Committee, the time for re-examination and restructuring has not yet passed. The DSB task force authors call for a more rigorous overhaul and clearly imply that GPS still does not receive the requisite level of attention and prioritization due to a “ of critical importance to essentially all aspects of U.S. life and well beyond the scope of any single Department.”
They conclude: “ in consideration of this specific definition of accountability and responsibility, policy and operational responsibilities for GPS within the DoD have been diffused by various management decisions over the last several years. The sometimes overlapping, sometimes-disconnected roles of the Office of the Secretary of Defense staff components, the Joint Staff and the Air Force in the management of GPS have created considerable confusion over where responsibility for GPS actually rests. This sense of confusion has also impacted civil and international perceptions of the importance the U.S. places on GPS and the commitment of the U.S. to GPS sustainment and evolution.
“ is incumbent on the Secretary of Defense to redefine lines of authority and responsibility for the system and to reestablish the DoD position of leadership for GPS as the heart of the space-based PNT infrastructure both domestically and internationally. The Task Force recommends that the DoD remain the steward for all GPS satellite services and considers it vitally important that GPS responsibilities within the Department be clearly assigned and described. The Task Force recommends that the Secretary of Defense provide such clear guidance applicable to the full range of military and civil GPS signal services in the future.”
Agreement on Galileo Facilities
In a major step forward for the European satellite navigation system, breaking a logjam that had threatened to push the program into dysfunction, the Big Five nations have struck a deal on location of system facilities necessary for successful deployment and operation of the Galileo program.
France will host the headquarters of the Galileo concession in Toulouse, the site of its own national space agency. The operations company will reside in London, United Kingdom. The two control centers (constellation and mission) will set up in Germany and Italy, as will two performance evaluation centers supporting the concession headquarters. Spain will host facilities to provide redundancy, related to Galileo safety-critical applications, for the control centers.
A new, as yet unidentified consortium of German companies will join the Eurely/iNavsat consortium, adding their core competencies to the concessionaire.
The agreement follows and reaffirms a financing consensus reached last month, which channeled a much-needed E200 million to the program and ensured the first satellite launches, but left dangling the key question of the income-generating facility locations. A European Commission-appointed mediator was rushed in to resolve the impasse in time for the December 5 Transport Council meeting. While further issues and correlative funding for later phases remain unsettled, this agreement clears the way for concession partners to finalize the concession contract with the Galileo Joint Undertaking.
Safety of Life. In a separate development, NovAtel Inc. of Calgary, Alberta, Canada, received a contract from CMC Electronics Inc., to undertake development of a Galileo Safety of Life (SoL) demonstrator receiver for the Canadian Space Agency (CSA). Galileo plans to offer the Safety of Life Service as a benefit to users equipped with Galileo-compatible receivers. NovAtel will develop a new Galileo E5a/E5b receiver section for addition to the existing Galileo Test Receiver, previously developed for the CSA under a Space Technology Development Program contract awarded in September 2004.
A number of factors have converged to promote the steady growth of in-vehicle navigation systems (IVNSs) within the automotive industry. When selective availability (SA) was set to zero on May 1, 2000, the performance of Standard Positioning Service (SPS) C/A-code receivers improved dramatically — virtually overnight. Users awoke the following morning and observed their receivers navigated remarkably better.
Additionally, commercial efforts to survey and digitize the vast North American road network intensified in the early part of this decade, which led to greatly improved quality and reliability of digital map data in geographic information systems (GISs). These mapping activities continue today at the same brisk pace and promise to further reduce vehicle navigation errors due to faulty GIS data.
Also, consumer familiarity with GPS technology has increased substantially over the past five years, spurring greater confidence in GPS-derived location data.
In addition to these contributing factors is the primary driver behind the rapid growth in IVNS technology: The downward trend in C/A-code receiver pricing.
In 1996, a typical handheld consumer GPS receiver cost more than $300. Today, a similar device sells for less than $100 and, at a slightly higher cost, may also contain a color display, a rich map database, and a serial interface to transfer the navigation data to an external application.
Unit size, weight, and power consumption also have trended downward. The net effect of these individual factors has been to accelerate the use of GPS within the automotive industry.
Road Obstacles. Nonetheless, significant technical challenges remain. A growing application of GPS/GIS technology involves providing timely and accurate turn-by-turn driving instructions to motorists. IVNSs may display these instructions on a map within the vehicle console and/or communicate the information verbally through spoken commands and street names, whichever the driver prefers.
In either case, the systems calculate in advance the most-efficient route to the driver’s requested destination using a route generator. Route generation may occur within the vehicle client (referred to as onboard navigation) or may be performed on a remote server (offboard navigation), whereby a high-bandwidth wireless data connection downloads turn-by-turn instructions to the vehicle client.
One of the application’s most difficult technical challenges is delivering reliable turn-by-turn navigation instructions in degraded GPS signal environments — in particular, the urban canyon environment found in most large cities.
Tall buildings, tunnels, and other barriers frequently obscure line-of-sight range measurements to orbiting satellites, limiting the receiver’s ability to compute a fix. Reflected multipath is also a common phenomenon that degrades fix accuracy and introduces the potential for false driving instructions.
Because many drive routes across North America pass through these environments, a reliable and cost-effective technical solution is required to overcome these challenges. Furthermore, a robust and repeatable method to test this system is needed to measure compliance with performance requirements across a broad spectrum of vehicles.
Inertial Sensors. A common approach in the automotive industry to minimizing the effects of degraded sky visibility and harsh urban multipath involves coupling the GPS receiver with an inertial sensor such as a gyroscope.
This dead-reckoning approach is supported by years of industrial research in applied Kalman filtering and sensor error modeling. However, there are two significant challenges to commercializing this approach for IVNSs:
1. First, to ensure two-dimensional (2D) rate gyros operate properly, we must mount gyros tangent to the Earth’s sur face (that is, flat or horizontal). This is not always feasible given the orien-tations of some embedded vehicle navigation systems. We can partially obviate this constraint by employing additional accelerometer sensors, but this approach introduces substantial design and manufacturing complexity. Replacing the 2D-rate gyro with a 3D gyro also solves the mounting problem, but at a significantly increased expense.
2. The second drawback of the gyro-based approach is its cost. Although the price of automotive-grade gyros gradually has trended downward over the past five years, a basic 2D device that satisfies strict automotive environ-mental requirements still costs a minimum of $10–12 in large quantities (more than one million). Current cost pressures in the automotive industry encourage suppliers and esigners to satisfy technical requirements at the lowest possible expense.
Figure 1 ABS system diagram
For these reasons, automakers and their IVNS suppliers have recently begun pursuing the innovative alternative of using independent wheel-speed sensor (WSS) measurements from the front and rear axles to calculate changes in yaw rate.
Wheel-Speed Sensors
WSSs are a fundamental component of the antilock brake system (ABS), which is standard equipment on nearly all new vehicles. They generate electrical pulses at frequencies proportional to the rotation rate of the individual wheels and deliver these signals to the ABS controller as shown in Figure 1.
Differencing the pulse rates between the left and right wheels allows an IVNS to calculate changes in vehicle heading. The system also can determine nondirectional vehicle speed by averaging the left and right signals.
Figure 2 Wheel velocities
The generalized equations for yaw rate estimation are given as (see Figure 2):
where the Vxx terms represent the velocities at each wheel (first subscript: l = left, r = right; second subscript: f = front; r = rear) and twr is the track width of the rear axle (the distance between the rear-wheel tire tracks).
Similarly, yaw rate derived from the front wheels is defined as:
where δ is the steering angle. Note the effective track width for the front wheels varies according to the radius of the turn. We must model this effect appropriately in software to accurately compute heading rate using data from the front wheels.
Data Distribution. Use of WSS signals to perform dead reckoning is also appealing because ABS controllers transmit independent wheel-speed measurements at regular and frequent intervals over the vehicle local area network (LAN) that links together the various onboard microprocessors.
Many IVNSs include a gateway to the vehicle serial data bus; therefore no additional input pins are required for these systems to receive the WSS electrical pulses. Obtaining these periodic wheel-speed data is simply a matter of modifying the LAN controller software within the navigation system to retrieve these messages and deliver them with minimum latency to the embedded GPS receiver in the desired format.
Directional Accuracy. How accurately can an IVNS use WSS data to calculate changes in vehicle direction?
Consider a vehicle with 27-inch (68.6-centimeter) -diameter tires (measured tread-to-tread) with nominal air pressure, rear track width of 62 inches (157.5 centimeters) and sensor resolution of 47 teeth per rotation. The worst-case resolution based on 1-pulse-per-second quantization error and sufficiently high data sampling rate by the ABS controller can be obtained as follows:
By using WSS measurements from both wheel pairs simultaneously, we can improve this value by a factor of two, achieving a heading rate resolution of 0.84 degree per second. This measurement resolution equates to a maximum accumulated error of 13 degrees over one-quarter mile (0.4 kilometer) when traveling at 50 miles per hour (80.5 kilometers per hour). In practice, actual results are considerably better because uncorrelated jitter in the left and right wheel sensor data is smoothed out over time (see Figure 3).
Figure 3 Sample wheel-speed sensor data. Epoch interval is approximately 53 milliseconds.
Design Challenges
While the example above illustrates WSS dead reckoning performance under worst-case data quantization conditions, a num-ber of important variables must be factored into the system design to achieve reliable navigation performance under various conditions.
Sensor Type. Automotive WSSs are classified as either active or passive. Active sensors are based on a Hall-effect transducer using an active magnetic pickup to convert wheel motion to an electrical signal.
Active sensors have the advantage of performing well at extremely low speeds. Conversely, passive sensors use the principle of variable reluctance, in which the sensor teeth travel through a passive magnetic field at sufficient speed to generate a low voltage analog waveform (Figure 4).
Figure 4 Passive wheel-speed sensor
These types of sensors exhibit a deadband, or a discrete speed below which motion is undetected (typically 2 to 5 kilometers per hour or 1.2 to 3.1 miles per hour). This design limitation can dramatically degrade vehicle navigation performance if the dead-reckoning software within the GPS receiver is not designed to identify this condition.
A challenging situation occurs when one wheel sensor is generating pulses while the opposite wheel sensor does not. This may occur, for example, when a vehicle initiates a gradual turn after being stopped at an intersection — for a brief period of time the inside wheel may not rotate fast enough to generate electrical pulses.
The same situation may also occur if the wires carrying the electrical signals from the WSS pairs to the ABS controller are significantly different in length, causing further attenuation of the weaker signal.
The temporary absence of sensor data that may occur in these examples might fool the dead-reckoning algorithm into underestimating the turn radius, consequently leading to an incorrect calculation of the vehicle heading. However, through careful, real-time analysis of the independent wheel-speed data, the system typically can detect this condition, thereby preventing mistakes in vehicle heading determination.
Sensor Tooth Count. The number of sensor teeth that pass through the magnetic pickup dictates the number of pulses generated per rotation. Heavy-duty vehicles such as trucks and sport utility vehicles often employ sensors with higher tooth counts. Smaller passenger cars may use sensors with fewer teeth. Although higher tooth counts provide greater quantization of wheel-rotation rate, it is important to design the system to operate reliably when fewer sensor teeth are present.
Tire Size. Changes in tire size occur constantly based on temperature, altitude, air pressure, and tread wear. Tires occasionally fail and must be replaced, often with a smaller-diameter spare.
Furthermore, some owners prefer to install custom wheels on their vehicles. As tire diameter varies, the distance traveled per WSS pulse also varies.
The dead-reckoning filter within the GPS receiver navigation engine must quickly adapt to all of these incremental changes in tire size to work properly under all conditions. This adaptation process is analogous to the continual estimation of gyro bias and drift terms in a traditional Kalman filter.
LAN Variability. The ABS controller must transmit wheel-speed messages across the vehicle LAN at a minimum rate of 10 Hz to provide sufficient resolution for the WSS dead-reckoning filter to detect small changes in heading.
Although this requirement is generally satisfied by most LAN architectures, not all new ABS controllers transmit wheel-speed data at an equivalent rate. Furthermore, there is broad diversity of LAN architectures and wheel-speed message formats between vehicles and vehicle manufacturers — requiring the LAN controller within the IVNS to flexibly adapt to the host serial data interface.
To simplify the processing of dead-reckoning inputs to the GPS receiver, LAN messages typically are accumulated at one-second intervals triggered by the rising edge of the GPS 1-pulse-per-second pulse.
It is important to note that wheel-speed LAN messages typically are not synchronized with an external timing source such as GPS. For example, a vehicle LAN designed to operate at a 20-Hz rate may actually transmit wheel-speed messages every 53 milliseconds — slightly slower than the 50 milliseconds expectation.
Because wheel-speed inputs are accumulated at precise one-second boundaries, the pulse-count inputs to the GPS receiver may spike every few seconds, giving the appearance of sudden decelerations and accelerations of the vehicle. This is simply because the LAN transmit interval may not multiply evenly into one-second boundaries.
This phenomenon is an artifact of message timing and will not affect navigation performance if it is managed properly in software. This effect is illustrated in Figure 5.
Figure 5 GPS-LAN timing mis-synchronization
Vehicle Chassis. Many important dead-reckoning parameters such as wheel track, wheelbase, center of gravity, sensor type, and minimum turn radius vary substantially from vehicle to vehicle.
These chassis parameters can be calculated automatically by comparing the output of the wheel sensors to GPS-derived position/velocity information. GPS data are used to continuously calibrate sensor data, ensuring that changes in heading and velocity derived from the wheel sensors will remain accurate. Conversely, navigation data from the wheel sensors is weighted more heavily when GPS information is less reliable, such as within a dense urban environment.
Wheel Slippage. Tires tend to slip on wet and icy roads. The same phenomenon occurs on gravel surfaces. Actively monitoring for this condition and discarding untrustworthy wheel data for short periods if a better data source is available can significantly mitigate this effect.
Figure 6 GPS/WSS dead-reckoning accuracy in Chicago
Road Tests
Because downtown Chicago contains particularly severe urban canyons (see photo), much of the navigation testing outlined in this article occurred within this city. Performance results for a vehicle in this environment are shown in Figure 6 and Figure 7.
We based the accuracy statistics upon a series of drives conducted throughout a four-hour period and derived the data using an automotive-grade gyro-based truth reference. Note that we discarded some gyro-based truth files due to poor performance.
Figure 7 2D ground plot (unaided GPS versus GPS/WSS dead reckoning)
The unaided GPS fix-density metrics achieved in Chicago are representative of a typical low-sensitivity GPS receiver in a severe urban environment. Note the significant improvement in fix density and 2D-position accuracy achieved through the use of WSS dead reckoning.
Test Barriers. Although tests similar to those described above provide an excellent venue for collecting system performance data, a number of variables make it impractical to conduct repeated and extensive drive tests in geographically separated cities.
Limited vehicle availability, varying GPS constellation geometry, unpredictable multipath effects, engineering resource availability, inclement weather conditions, and travel expenses make lengthy field trials by IVNS testers impractical. For these reasons, my company assisted in the development of an automated simulation capability to assess system performance for a wide class of vehicles under controlled multipath, obscuration, and satellite-geometry conditions.
These simulations can be repeatedly executed for extended periods of time at the developer’s lab facilities. This simulation system is shown in block-diagram format in Figure 8.
Figure 8 GPS/WSS dead-reckoning automated test setup
Simulations
Procedures for creating a GPS/WSS dead-reckoning simulation are described below.
First, we equipped a test vehicle with a generic GPS receiver capable of National Marine Electronics Association (NMEA) 0183 message-type output and a roof-mounted antenna.
NMEA Messaging. We connected a specially designed LAN-data-capture utility to the On-Board Diagnostics level 2 (OBD2) port below the steering wheel to retrieve wheel speed messages, odometer data, steering wheel angle, and transmission status messages. This data-capture utility creates an ASCII file of serial LAN messages interspersed with once-per-second $GGA/$RMC NMEA 0183 sentences and text markers to indicate the rising edge of 1-pulse-per-second pulses.
After remaining stationary in an open area for three minutes to ensure a 3D fix is achieved, we drove the vehicle for 90 minutes in open sky conditions with minimal obscuration. The test route contains a series of sharp left and right turns, several straight and curved road sections, forward and reverse maneuvers, and a varied speed profile. Upon completion of the test route, we switched off the data recorder.
LA SALLE ST., downtown Chicago
Motion Profile. Next, we used the recorded NMEA data file to create a 1-Hz motion profile for the GPS constellation simulator. We loaded the most-current almanac into the 12-channel simulator and initialized the scenario start time to the beginning of the test drive. We then set output power levels to the expected C/N0 values for open sky conditions with attendant radio-frequency (RF) cable loss.
We then connected the LAN data recorder to the simulation equipment on the test bench and toggled it to "playback" mode. The rising edge of the first pulse from the GPS simulator 1-pulse-per-second output triggers playback to the receiver being tested. The playback tool is designed to maintain synchronization between 1-pulse-per-second updates and corresponding LAN data to within 10 milliseconds throughout the 90-minute scenario.
Comparative Studies. While the simulation is in progress, the test PC logs the binary once-per-second messages from the receiver under test. At the conclusion of the scenario, we plot the receiver’s latitude and longitude values and compare them with the actual test drive. We conduct additional comparisons between the test receiver’s speed, heading, and C/N0 values, and the actual values observed during the test drive.
If the test was set up correctly and the equipment operated normally, there should be virtually no difference between the simulated and actual results. Minor discrepancies may be observed due to expected differences in ionospheric and tropospheric modeling, receiver noise figure differences, and ephemeris variations.
Controlled Testing. At this point, inten-tional multipath, obscuration, and power level variations can be deliberately introduced into the GPS simulator scenario. These effects are created to model tunnels, reflections from tall buildings, and limited sky visibility between intersections — conditions found frequently in large cities.
These phenomena provide excellent, controlled test conditions for the dead-reckoning filter within the GPS receiver — the filter should weight WSS measurements more heavily when GPS pseudorange residuals are high, C/N0 values are weak, or the satellite signals are otherwise in doubt.
Although this approach still requires data collection in a vehicle, the duration of the test is reduced to 90 minutes and we can repeatedly change the environmental characteristics of the scenario to model a variety of signal conditions. This method can be used to emulate a city such as Chicago without requiring travel to that location.
Clean Data. At this point, the reader might ask why the data is not collected in a severe urban environment in the first place. Why is it necessary to collect open-sky data and to add artificial multipath, tall buildings, and tunnel effects later?
The answer is that when the GPS simulator generates a scenario based on pre-recorded NMEA motion data, it creates the nominal satellite RF signals that correspond with those times and locations.
Satellite C/N0 values, Doppler values, and code phases are all generated to correspond with that exact vehicle motion profile. If NMEA data were to be collected in a harsh environment such as Chicago, this motion file would be heavily corrupted by the same signal effects mentioned earlier (reflections and obscura). The GPS simulator would not know this, and would simply create the nominal satellite signals corresponding to those corrupted once-per-second locations.
If we connected the navigation system under test to the simulator and LAN playback utility, the GPS signal characteristics would appear to be optimal throughout the route, interfering with the IVNS’s ability to distinguish good satellite signals from poor ones. This in turn would cause the IVNS to de-weight or to ignore the wheel-speed dead-reckoning inputs at times when their contributions to the solution were especially important. In short, these test results would be invalid.
Sample simulation results are shown in Figure 9. The test vehicle in this example was a 2005 Chevrolet Equinox, traveling east toward downtown Detroit. Note that a smaller-diameter spare tire was deliberately installed on the right rear wheel prior to the test drive to assess the ability of the dead-reckoning filter to adapt.
Figure 9 Actual GPS/WSS dead-reckoning data versus simulation playback
During the simulation, we deliberately switched off the GPS satellite signals prior to the Lodge Freeway tunnel and reintroduced them as the vehicle exited approximately one-half a mile (0.8 kilometer) later. In both cases (actual and simulation), the WSS data (including pulses from the right-rear spare tire) helped the driver accurately navigate throughout the tunnel.
Conclusion
Our customer developed an innovative approach to automotive dead reckoning using WSS data to calculate changes in vehicle yaw and tested the technique in many environments including downtown Chicago and Detroit.
This augmentation technique will be an effective method to deliver accurate turn-by-turn driving instructions to customers requesting navigation assistance in difficult environments.
The technique significantly reduced 2D position errors achieved in Chicago compared to unaided GPS, while improving fix density in challenging environments to 100 percent.
We also have assisted with the development of a creative and reliable approach to thoroughly evaluate navigation performance on a variety of vehicles that requires only 90 minutes of local driving. This simulation capability will reduce test time required to certify system performance and will help identify technical problems well before product launch.
Further Reading
Manufacturers
The test drives referenced in this article were conducted using a 12-channel Oncore GPS receiver with WSS dead-reckoning input from Motorola Inc. (www.motorola.com) and a SiRFDrive II GPS receiver with WSS dead reckoning from SiRF Technology, Inc. (www.sirf.com). (Note: SiRF acquired Motorola’s GPS product line on June 1, 2005.) Spirent Communications (www.spirentcom.com manufactured the 12-channel GPS simulator used. Custom development tools manufactured by Danlaw Inc. (www.danlawinc.com) helped retrieve the ABS wheel-speed signals from the vehicle LAN, and reformat and deliver them to both GPS receivers.
CURTIS HAY served as an officer in the United States Air Force for eight years in a variety of GPS-related assignments. He conducted antijam GPS research and development for precision weapons while assigned to the Air Force Research Laboratory, and managed the GPS Accuracy Improvement Initiative for the control segment while assigned to the GPS Joint Program Office. After separating from active duty, he became the lead GPS engineer for OnStar, a division of General Motors Corp. Hay currently serves as a senior systems engineer for Spirent Federal Systems (www.spirentfederal.com a supplier of high-performance GPS test equipment. He can be reached at [email protected]
"Innovation" is a regular column featuring discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by RICHARD LANGLEY of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick, who appreciates receiving your comments and topic suggestions. To contact him, see the "Columnists" section on page 6 of this issue.
By Glenn MacGougan, Peter Ludvig Normark, and Christian Stahlberg
Published: January 2005 GPS World
In this month’s Innovation, we look at a further evolution of the GNSS receiver which offers the promise of flexibility, adaptability, and cost-effectiveness.—Richard Langley