Cavli Wireless offers the CQM220 5G RedCap module as a key part of its C-Series portfolio. Built on 3GPP Release 17 standards, the CQM220 brings the benefits of 5G reduced capability (RedCap) technology to internet of things (IoT) applications that require higher data rates, lower latency, and improved efficiency compared to traditional LTE solutions, while maintaining a cost- and power-optimized design.
Cavli Wireless is an end-to-end IoT solutions provider specializing in cellular IoT hardware, connectivity, and software.
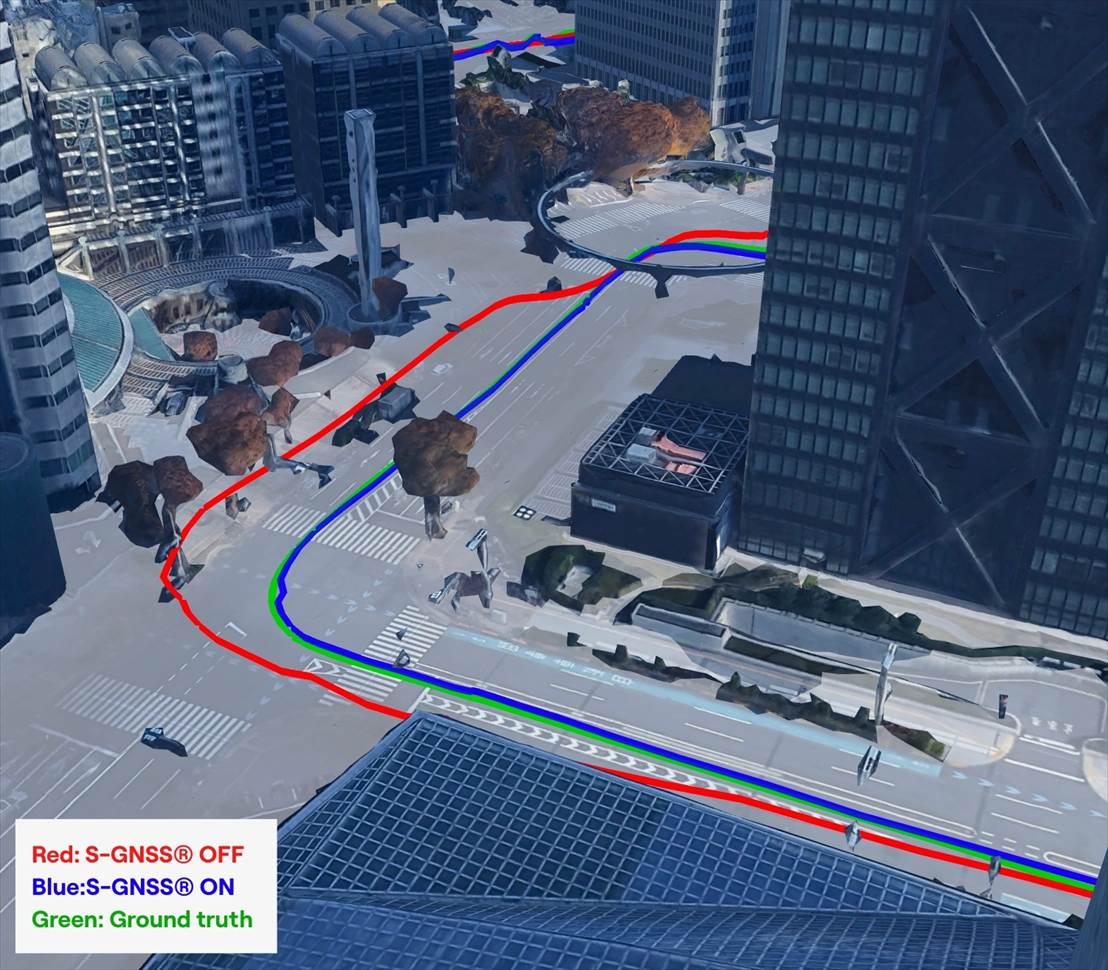
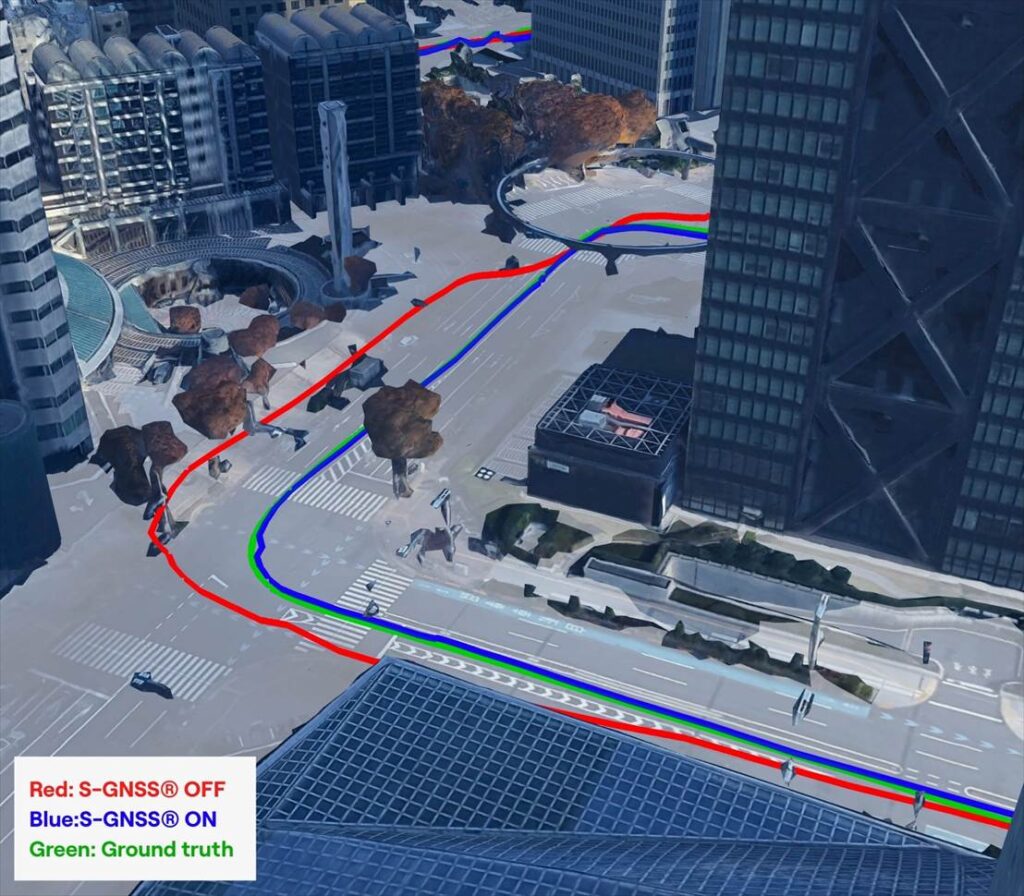
For location-centric and mobility-driven use cases, the CQM220 integrates multi-constellation, dual-band GNSS with L1 and L5 support, including GPS, GLONASS, Galileo, BeiDou, NavIC, QZSS and SBAS. Dual-band positioning improves accuracy, reduces multipath interference, and enhances reliability in dense urban environments, industrial corridors, ports, mining zones, and other signal-challenged areas. This advanced GNSS architecture enables consistent, high-precision location awareness for mobile and geographically distributed IoT assets operating in dynamic conditions.
The CQM220 supports data rates of up to 220 Mbps downlink and 120 Mbps uplink under 5G RedCap, with LTE Cat 4 fallback for backward compatibility with 4G networks. This combination enables reliable operation across diverse network environments and ensures seamless migration toward 5G for OEMs and solution providers.
Designed in a compact LGA form factor and additionally offered in an M.2 form factor, the CQM220 provides flexibility for both embedded designs and standardized expansion-slot implementations. The LGA variant measures approximately 28.0 mm x 25.5 mm x 2.7 mm, making it well-suited for compact device architectures while still offering rich peripheral and interface support.
At the core of the CQM220 is an Arm Cortex-A7 processor clocking up to 1.9 GHz, paired with flexible memory configurations and the OpenWrt operating system. This architecture provides a robust platform for developers to build and deploy applications, while Cavli’s SDK enables custom application development directly on the module. By supporting on-module processing, the CQM220 reduces reliance on external microcontrollers, lowers the bill of materials, and simplifies overall system architecture.
The combination of precise GNSS and high-throughput 5G RedCap connectivity enables a new class of performance-driven and monitoring-intensive IoT applications. The CQM220 is well-suited for real-time fleet and asset tracking with continuous telemetry, smart logistics platforms with route optimization and cargo condition monitoring, industrial automation systems that rely on uninterrupted sensor data streams, HD and multi-camera smart surveillance deployments requiring sustained uplink bandwidth, and Industry 4.0 environments where low-latency data exchange and edge intelligence are critical to operational efficiency and predictive maintenance. These capabilities make the module an ideal foundation for solutions that demand both accurate location intelligence and sustained high data performance at scale.
In addition, the availability of the CQM220 in an M.2 form factor makes it an ideal choice for routers, industrial gateways, and customer premises equipment. The standardized M.2 interface enables seamless integration into existing networking hardware platforms, reducing development complexity and accelerating time to market. For industrial gateways, it provides a high-performance 5G RedCap backhaul option to aggregate field device data and securely transmit it to cloud platforms. In enterprise and retail routers, it enables reliable primary or failover WAN connectivity with enhanced throughput. For customer premises equipment in residential, enterprise, or remote deployment scenarios, the M.2 variant supports scalable 5G broadband access with simplified installation, efficient thermal design, and compatibility with modular network architectures.
The module also offers a wide range of interfaces, including USB 2.0, PCIe Gen2, I2C, UART, SPI, SDIO, I2S, ADC, and multiple antenna interfaces for main, diversity, and GNSS. With support for global and regional 5G and LTE bands, the CQM220 is designed for worldwide deployments, enabling OEMs to build a single hardware platform for multiple markets.