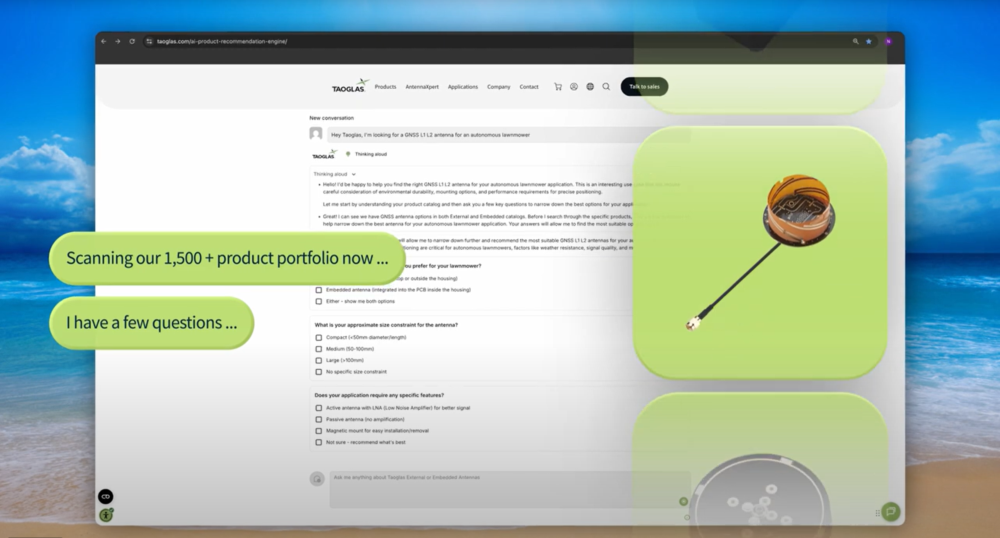
Taoglas has launched its AI-driven Antenna Product Recommendation Engine, a platform that helps engineers and organizations select the company’s antennas and RF components.
Available worldwide, the tool provides both seasoned RF engineers and non-technical decision-makers with intelligent guidance to make informed choices.
Early-stage antenna decisions can disproportionately impact system performance, cost and time to market. Yet engineers often rely on datasheets, parametric searches, or manual cross comparison, a process that can consume hours or days amid the growing complexity of modern RF systems.
The new recommendation platform embeds two decades of Taoglas expertise into a digital tool, applying AI trained on real-world design knowledge to scan, filter and refine suitable products in minutes, drawing on insights from tens of thousands of projects worldwide.
The tool is the newest addition to the AntennaXpert ecosystem, complementing Taoglas’ Antenna Builder and Cable Builder for configuration, as well as the Antenna Integrator for PCB placement. Together, they enable a seamless path from initial selection to integration, Taoglas said.
Autonomous mapping company Emesent has launched the Emesent GX1, an integrated simultaneous localization and mapping (SLAM) and real-time kinematic (RTK) scanner. The company is exhibiting the GX1 at Geo Week 2026 (booth #911).
The product achieves 5-10mm global accuracy to deliver high precision for topographic surveying and building and infrastructure construction. It can reduce the time required to survey a site by up to 95% with a single day of scanning replacing weeks of work, Emensent stated in a press release.
The GX1 is an integrated, all-in-one system where lidar, RTK, cameras and software work together seamlessly from capture to validated deliverable. Its SLAM technology was proven in the world’s most challenging environments to everyday surveying applications, but it also eliminates the longstanding trade-off faced by survey firms and the architecture, engineering and construction (AEC) industry between mobile scanning speed and dependable survey-grade accuracy.
Suited for use cases across topographic and road survey, scan to building information models (BIM), construction progress tracking and more, the GX1 is simple enough for junior surveyors to train on and deploy in a matter of days yet powerful enough to meet the needs of experts in the field.
Accuracy. GX1 is the only SLAM-based mobile scanner system delivering 5-10mm global accuracy combined with rapid scanning capabilities. Incorporating client-first design, integrated RTK and Emesent’s proprietary SLAM algorithm, GX1 offers repeatable results survey firms can rely on.
Proven SLAM algorithm: Emesent’s SLAM technology, which powers its award-winning Emesent Hovermap product, was developed and validated in some of the most extreme real-world environments, includidng GPS-denied underground locations. It delivers repeatable accuracy both indoors and out.
Versatile deployment: GX1 has four purpose-built deployment modes: backpack, survey pole, vehicle mount, and supported handheld. Flexible georeferencing minimizes the risk of having to return to a site for redo – surveyors can capture with RTK in the field or with ground control points and checkpoints in post-processing.
The GX1 is being launched at a pivotal moment for survey firms and the AEC industry, which are grappling with a shortage of experienced surveyors, Emensent stated. At the same time, firms face mounting pressure from clients demanding faster, cheaper and better results without quality compromise, alongside the diminishing competitive advantage of adopting basic mobile scanning technology.
“With the introduction of the GX1, we’ve answered the call we’ve heard echoing throughout the surveying industry to end the tug-of-war between fast and accurate,” said Stefan Hrabar, chief strategy officer and co-founder of Emesent. “By putting the power of SLAM into the hands of the everyday surveyor, the GX1 raises the bar for mobile scanning accuracy and keeps critical projects on track.”
Technical Features
Independently validated 5-10mm global accuracy
Integrated RTK georeferencing with real-time quality monitoring
4 x 20MP cameras for 360° panoramic imagery
Emesent SLAM algorithm
Four deployment modes: backpack, survey pole, vehicle mount, handheld
Integrated batteries for cable-free management
Rapid accuracy validation reports in Aura processing software.
Several interesting things, according to geologists who study data from the global network of geodetic-quality receivers. A team at the University of the Basque Country found the Iberian Peninsula rotating clockwise as Africa closes on Eurasia by 0.2 inches per year (5 mm), near Gibraltar and the Alboran region. Meanwhile, in a process called lithospheric dripping, Earth’s crust is sinking under Central Turkey despite being part of a broader region that has been uplifting for millions of years, according to University of Toronto researchers. Meanwhile, in the U.S. Pacific Northwest, seismic data collected during a National Science Foundation study shows the Cascadia subduction zone actively breaking apart.
Making better robots with GNSS
Image: Robosat Project
Autonomous robot navigation in the wild using satellite-based 3D geographical information (Robosat) aims to provide a scalable multi-GIS high-quality data collection platform through using a quadrupedal robot that can autonomously perform long-distance missions in challenging environments, such as the Alps or Finnish forests. Researchers from Finland, Switzerland, Spain and Romania gathered at Tampere University in Finland to share data, identify relevant GIS and GNSS datasets, and leverage AI for autonomous labeling of large-scale data. Key topics included integrating multi-sensor and multi-GIS data to enhance positioning, planning pilot tests with ETH’s ANYmal robot (pictured) and TAU’s new I/Q GNSS grabber device, and discussing methods for AI-driven data labeling for massive datasets collected in field trials.
It’s all happening downtown
Image: Getty Images / Ivan Pantic
Researchers from Shandong Jianzhu University and the China University of Mining and Technology describe a new smartphone positioning strategy in the Dec. 15, 2025, issue of Satellite Navigation. They use a positioning framework that combines 3D map constraints with multiple GNSS observations. By integrating time-differenced carrier-phase information with probabilistic road matching and factor graph optimization, the approach reduces ambiguity in candidate positions and enhances robustness against non-line-of-sight signals. In field tests, the method outperformed existing smartphone GNSS techniques, delivering more reliable location estimates and smoother trajectories even in severe urban canyon conditions.
2,000 and counting
Image: Getty Images / rvimages
The International Air Transport Association (IATA) has called for vigilance following the increasing number of GNSS spoofing and jamming incidents worldwide. The growing interference poses a significant risk to flight navigation and pilot safety. Of note is a spike in incidents at major Indian airports. Almost 2,000 GNSS interference incidents have been logged at airports in India since 2023, including the airports in Delhi, Mumbai, Kolkata, Amritsar, Hyderabad, Bengaluru and Chennai. IATA represents more than 360 airlines, accounting for 80% of global air traffic.
Ionospheric delay remains a significant error source in GNSS positioning, particularly for single-frequency users and during periods of enhanced space weather activity (Dabbakuti, 2021). While global and regional ionospheric models provide large-scale corrections, they often fail to represent localized ionospheric variability at individual receiver locations (Jee et al., 2010; Osanyin et al, 2025).
Consequently, residual ionospheric errors persist in positioning solutions, degrading accuracy for applications including precise point positioning (PPP), real-time navigation, and single-frequency GPS users (Biswas et al., 2022). Hence, accurate modeling of the ionosphere is essential in tackling the principal challenges in high-precision GNSS positioning.
Vertical total electron content (VTEC), a key driver of ionospheric delay, exhibits strong nonlinear temporal variability controlled by solar radiation, geomagnetic activity, seasonal effects, and local electrodynamics (Osanyin et al., 2023; Seemala et al., 2023). Capturing this variability at individual GNSS stations poses a significant challenge. Advances in artificial intelligence (AI), i.e., machine learning (ML) techniques have emerged over the decades as powerful tools for approximating complex non-linear systems and deterministic geophysical processes, while significantly reducing computational cost (Sarker, 2021). As such, they have successfully replaced repeated full-scale numerical simulations by learning input-output relationships directly from data (Zhang et al., 2025). This paradigm shift is particularly relevant for ionospheric modeling, where long-term GNSS observations provide rich time series well suited for data-driven learning.
Time series forecasting traditionally relies on statistical models such as autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA), which model future values as linear functions of past observations (Kaselimi et al., 2020). They have been widely employed to predict VTEC by extrapolating historical observations. Nonetheless, the classical approaches are inherently limited by assumptions of linearity, stationarity and short-term memory, which restrict their ability to capture complex ionospheric dynamics, particularly during disturbed conditions and over longer prediction horizons. To address these limitations, this study adopts a deep learning-based framework using long short-term memory (LSTM) neural networks for station -pecific VTEC prediction. Unlike conventional statistical models, LSTM networks are specifically designed to learn non-linear temporal relationships and retain long-term memory in sequential data (Hochreiter and Schmidhuber, 1997).
Essentials
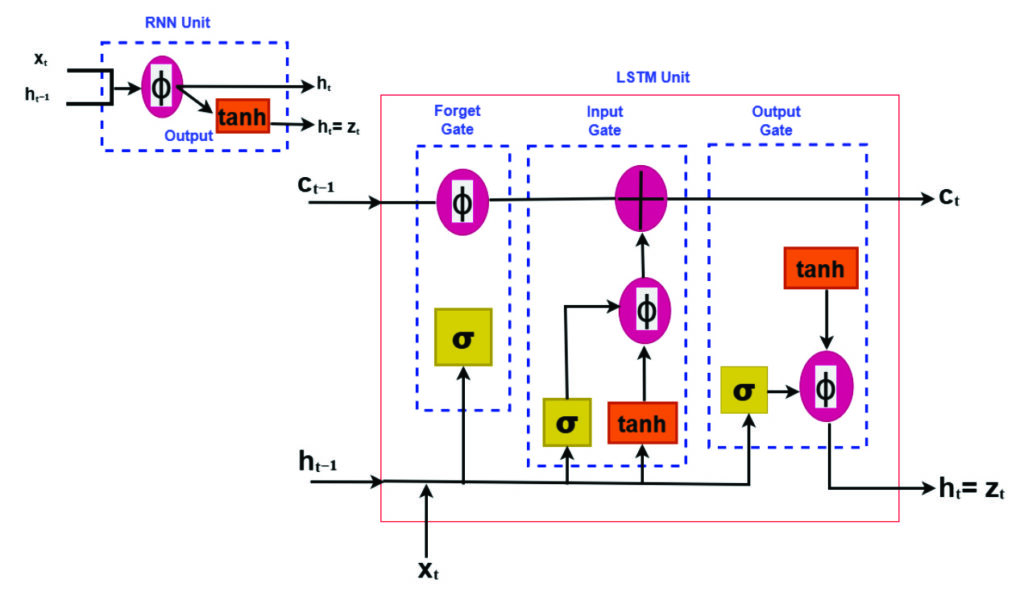
LSTM neural networks for prediction have emerged as a powerful tool for time-series prediction (Hochreiter and Schmidhuber, 1997). LSTM is a type of recurrent neural networks (RNNs) that takes sequences of information and uses recurrent mechanisms and gate techniques (see Figure 1). RNNs are well known for their ability to process single data points and entire data sequences (Gonzalez and Yu, 2018). The LSTM model has various forms for different types of data inputs. The basic condition of LSTM modeling is that all inputs and outputs are independent of each other. The key to the LSTMs is the cell state, which is protected and controlled by the forget, input and output gates, respectively (Gonzalez and Yu, 2018).
FIGURE 1 Comparison of recurrent neural network (RNN) and long short-term memory (LSTM) structures.
Training deep learning modelsremains computationally demanding despite their fast prediction capability. LSTM networks consist of interconnected layers with numerous trainable parameters that must be optimized iteratively to accurately capture temporal dependencies in the data. Training typically involves large historical datasets spanning multiple years, which is necessary to expose the model to varying ionospheric conditions, but also increases computational effort (Thompson et al., 2020). The optimization process relies on iterative algorithms such as stochastic gradient descent and variants, requiring repeated forward and backward passes through the network. As the depth of the model and the length of input sequences increase, so does the demand for memory and processing power. These challenges are particularly relevant when training is performed using graphics processing units (GPUs), where memory limitations and data transfer overhead must be carefully managed (Sarker, 2021).
Like all neural networks, LSTM has trainable parameters (weights and biases). These parameters are optimized by minimizing a loss function using gradient-based optimization. Due to its ability to learn time sequences, gradients must be propagated across time steps, not only across layers. This process is accomplished using backpropagation through time, which computes gradients of the loss with respect to all parameters and accumulates gradients across the sequence. The major advantage of LSTM is the use of its gating mechanism in mitigating vanishing gradients, making backpropagation practical for long time series such as VTEC (Adekunle et al., 2025; Hochreiter and Schmidhuber, 1997; Noor and Ige, 2025).
In recent years, LSTM networks have achieved impressive results in modeling complex physical systems characterized by strong non-linearity and long-term temporal dependencies. Notably, LSTM-based approaches have been successfully applied to atmospheric and geophysical time series, demonstrating superiority in predictive skill compared to traditional empirical and statistical models (see Reddybattula et al. (2022 and references therein). These research results show the capability of LSTM to capture diurnal, seasonal, and storm-time variations. By leveraging historical GNSS-derived VTEC time series, LSTM-based models can adaptively capture both regular ionospheric patterns and transient disturbances, enabling more accurate and robust VTEC forecasts. This data-driven approach directly supports improved ionospheric correction in GNSS positioning, offering a practical and scalable solution to overcome the shortcomings of traditional time series methods.
This study focuses a station-specific vertical total electron content (VTEC) prediction framework based on long short-term time series. The proposed framework treats VTEC prediction as a supervised regression problem. A sequence of past VTEC observations is used to predict future values over one or multiple forecast horizons. Also, emphasis is placed on methodology clarity, practical implementation, and positioning relevance.
Elements: TEC estimation from GNSS measurements
For the purpose of forecasting local VTEC using time series analysis, this study utilized the GPS dataset provided by the Brazilian Institute for Geography and Statistics (RBGE; www.ibge.gov.br/en/) over Santa Maria (SMAR; -20.72o, 306.28o), a station located in Brazil over the period of 10 years from January 2010 to December 2019.
VTEC data were derived from dual-frequency GPS observations at the selected station using the standard ionospheric processing techniques, including slant TEC estimation, instrumental bias correction, and mapping to vertical TEC. For more details, readers can consult the GPS-TEC analysis software developed by Seemala and Valladares (2011), which has been employed in this study for TEC processing. The time resolution is selected to be 15 minutes following an average over a sampling interval of 30 seconds. The resulting VTEC time series provides a continuous record of ionospheric variability with a fixed temporal resolution.
Station-specific LSTM modeling framework
A structured deep learning workflow for station-specific VTEC prediction has been adopted using the LSTM framework. The overall methodology follows a sequential pipeline consisting of data collection, preprocessing, feature engineering, model training, evaluation, validation, and deployment. This workflow ensures reproducibility, minimizes information leakage, and facilitates integration into GPS positioning engines. The focus is on time series learning at a single station, where temporal dependencies dominate and spatial smoothing from regional or global models is undesirable.
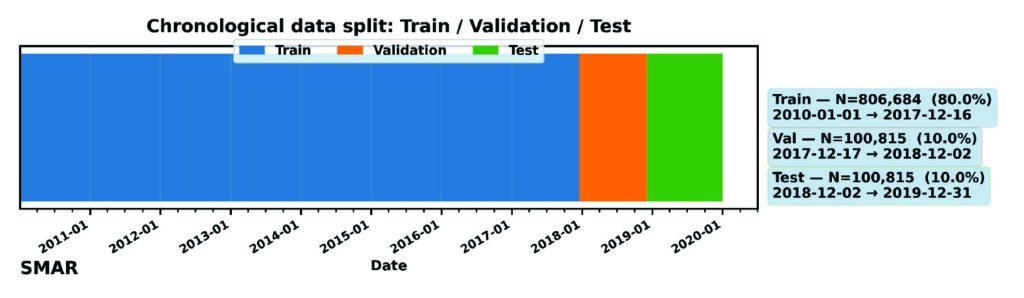
Data preparation and model training
High-quality input data are essential for stable LSTM training. The extracted VTEC time series are preprocessed to remove cycle slips, mitigate differential code biases, and ensure consistent temporal sampling. As shown in Figure 2, for this model (as variations can be considered), the dataset has been divided into training (80%), validation (10%), and testing (10%). The validation is mostly required during training the LSTM deep learning model to ensure generalization and prevent overfitting. Furthermore, preprocessing aims at ensuring capability of the model in handling missing data and temporal consistency checks.
FIGURE 2 Chronological splitting of VTEC dataset for machine learning.
Feature engineering mainly converts raw VTEC observations into structured model inputs such as local time (LT) and day-of-year (DOY) features. These features are normalized prior to training, although normalization is applicable to only the training dataset to avoid future leakage. The model consists of an input layer whose dimension equals the number of input features, followed by a single LSTM layer with 64 memory cells to learn temporal dependencies in the input sequence. A dropout layer with a rate of 0.2 is applied to mitigate overfitting during training. The LSTM representation is then passed to a fully connected (Dense) regression head with nout neurons, where nout equals the number of forecast lead times. Model training minimizes the Huber loss function using gradient-based optimization, while performance is evaluated using RMSE. The optimizer updates the network weights iteratively to reduce the forecast error across the training samples. Early stopping and regularization are applied to further prevent overfitting, particularly during periods of low ionospheric variability. The final outputs are the predicted VTEC at multiple lead times (in this experiment: 30, 60, 120 and 180 minutes). The trained model is suitable for deployment in near real-time ionospheric correction systems: once operational, it ingests the most recent VTEC observations and produces short-term forecasts that can be integrated into GNSS positioning workflows, particularly for single-frequency applications and PPP.
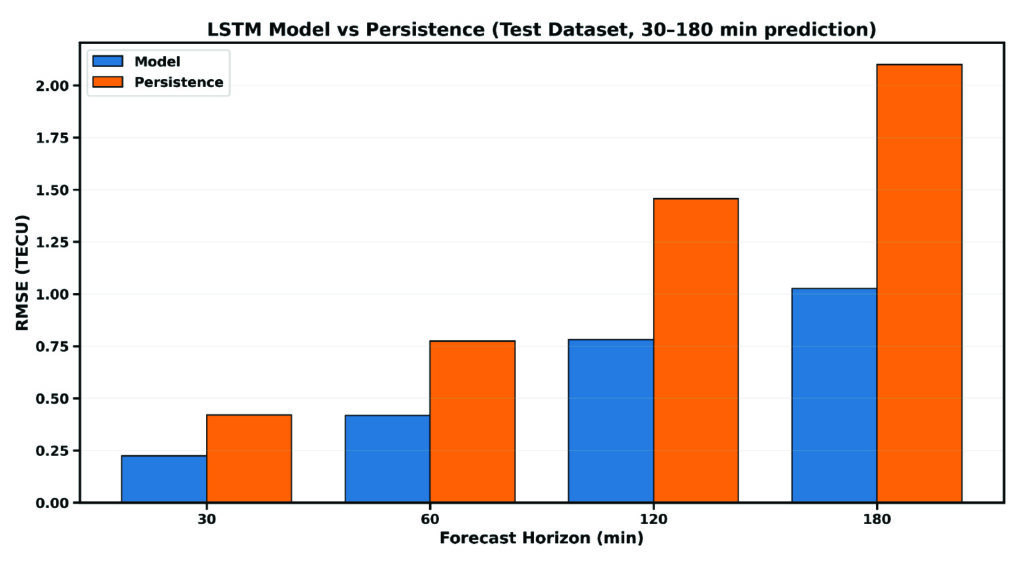
Performance evaluation and baseline comparison
For practical assessment, the LSTM-based predictions are evaluated against commonly used baseline models, including persistence (using the trained model with new data) and skill (the ability of the model to make predictions). These baselines represent the minimum performance expected in operational GNSS ionospheric modeling and serves as internal validation of the overall model’s performance. Evaluation metrics include, but are not limited to, root mean square error (RMSE), mean absolute error (MAE), and relative improvement over persistence (skill). Figure 3 compares the predictive performance of the proposed LSTM model against the persistence baseline on the independent dataset. RMSE increases over time, while persistence largely deviates from the LSTM model, showing the great strength and capability of the LSTM model for time series prediction over the Santa Maria station. For instance, the RMSE of the LSTM model increases from 0.24 TECU to 1.15 TECU from 30 minutes to 3 hours lead time, while that of persistence ranges from 0.41 TECU to 2.25 TECU, respectively.
FIGURE 3 Comparison between the RMSE of the LSTM model and persistence for single-station VTEC prediction.
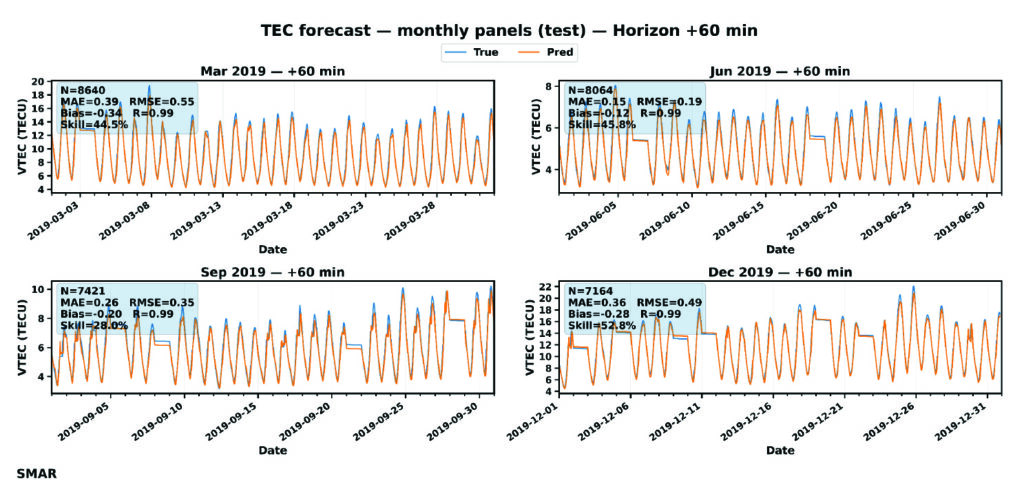
For further evaluation, day-to-day variation of VTEC at 60 minutes lead time is shown in FIGURE 4. GPS TEC (orange curves) shows a strong diurnal cycle with expected daily peaks, while forecast (blue curves) matches these peaks across months, indicating that the LSTM captures the key deterministic component of TEC variability. TABLE 1 or the embedded metrics in Figure 4 summarizes an overall accuracy of the LSTM model using the performance metrics: MAE, RMSE, Bias, R, and skill. MAE and RMSE values change with season — with the lowest reported in July.
FIGURE 4 Day-to-day variation of VTEC at 60 minutes forecast during July to December 2019. The embedded metrics show the performance of the LSTM model for each month of the testing dataset.
Error increases toward December with the largest RMSE in March (0.549 TECU). September shows moderate error levels. Also, correlation is consistent across all months, which confirms the model’s capability to capture TEC changes and day-to-day variability patterns. The model is nearly unbiased as the bias is consistently close to zero, meaning that the LSTM does not drift systematically and shows that the model underpredicts GPS VTEC. This characteristic is important for operational GNSS corrections, because biased VTEC forecasts would translate to persistence positioning errors. Going by the skill values, even at 60 minutes forecast, the model provides ~27%-52% improvement over persistence. This result implies a major indicator of real predictive ability, especially for GNSS applications.
Statistical validation
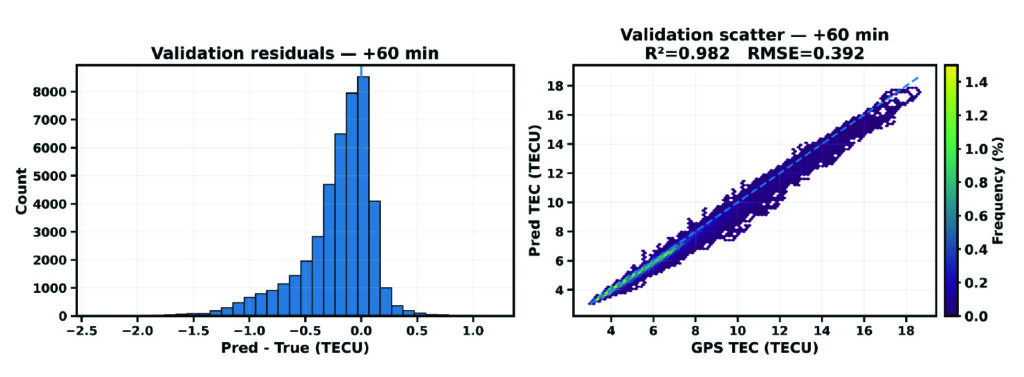
Figure 5 presents the diagnostic of the validation dataset for the SMAR station at a 60-minute forecast horizon. It combines the distribution of prediction residuals (left) and density-based scatter comparison between predicted and observed VTEC values. These analyses help explain the overall agreement of the LSTM model forecast during validation.
FIGURE 5 Validation diagnostics at 60 minutes forecast horizon. (Left) Histogram of prediction residuals. (Right) Density scatter of predicted versus observed TEC.
The residual distribution is mostly concentrated near zero, which implies that most predictions deviate only slightly from observations. The right plot shows the scatter density plot of predicted VTEC against observed GPS VTEC. The points are tightly clustered along the dashed line, indicating that the model corresponds very well (98.2%) to the TEC variance in the validation period. Also, a RMSE of 0.39 TECU reflects a relatively low magnitude error. These findings support the reliability of the proposed LSTM model for VTEC forecasting.
Implications for GNSS Positioning
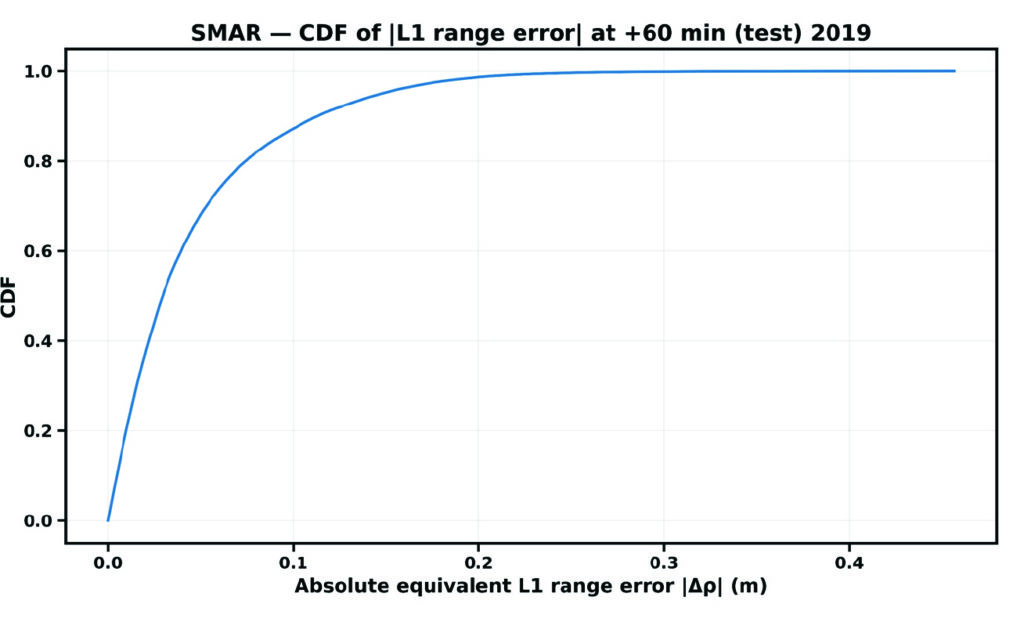
The cumulative distribution function (CDF) of the absolute equivalent L1 error, denoted by |∆ρ|, for the Santa Maria station at a forecast horizon of 60 minutes is shown in Figure 6.
FIGURE 6 CDF of residual VTEC equivalent L1 ranging error at the single station.
The CDF provides a direct positioning-relevant interpretation of model performance. The steep rise at small error values indicates that most samples exhibit low residual range errors, demonstrating strong correlation performance.
Evolutionary
This study demonstrates that LSTM-based machine learning provides a practical and effective approach for station-specific GNSS VTEC prediction during low solar activity. The LSTM model accurately reproduces diurnal and seasonal VTEC variability at the station level. Forecast skill remains stable across increasing horizons, while significant RMSE reductions over persistence confirm the model’s predictive value, supporting the feasibility of LSTM-based station-specific VTEC forecasting for operational GNSS applications. By leveraging historical GPS-derived VTEC time series, LSTM neural networks capture complex temporal dependencies that are difficult to model using conventional techniques. This approach offers a valuable complement to existing ionospheric correction models and represents a promising direction for future GNSS positioning systems. The results presented in Table 1 confirm that the proposed LSTM algorithm can derive an accurate predictive model as far as a 3-hour forecast. The proposed approach improves long-term ionospheric prediction and enhances positioning accuracy.
Month
MAE (TECU)
RMSE (TECU)
Bias (TECU)
R
Skill
Mar
0.39
0.55
-0.34
0.993
44.5
June
0.15
0.18
-0.12
0.994
25.8
Sep
0.26
0.35
-0.20
0.986
28.0
Dec
0.36
0.49
-0.28
0.994
52.8
Table 1 Comparison of VTEC performance metrics of the LSTM model at 60 minutes forecast.
While the results demonstrate the potential of AI-based modeling for station-specific VTEC prediction, further investigation is required to assess its limitations. Future research will investigate the sensitivity and robustness of the data-driven approach under extreme geomagnetic storm conditions and maximum solar activity considering multiple stations over the same region. These experiments will help evaluate the LSTM-based modeling reliance for a better positioning GPS accuracy. In addition, combining efficient training strategies with LSTM-based temporal learning offers a practical and scalable solution to station-specific VTEC prediction. The resulting models will bridge the gap between computationally expensive physics-based approaches and overly simplified empirical models, providing accurate, localized ionospheric corrections that directly enhance GPS positioning performance. Therefore, the Bayesian optimization technique would be integrated during model’s training to tune LSTM hyperparameters (Adekunle et al., 2025), with the aim of reducing computational cost and improving convergence and generalization in station-specific ionospheric modeling. It is very likely that machine learning will play a significant role in near-term ionospheric modeling/prediction for GNSS.
Dr. Taiwo Osanyin is a Ph.D. visitor at York University, Toronto, Canada. Her research interests include space physics, atmospheric sciences, statistics, and modeling of the upper atmosphere. Osanyin received a Ph.D. in space geophysics from the National Institute for Space Research, Brazil, an M.Sc. in nuclear science and engineering from Obafemi Awolow University, Nigeria, and a B.Sc. in engineering physics from Obafemi Awolow University, Nigeria.
Sunil Bisnath is a full professor in the Department of Earth and Space Science and Engineering at York University in Toronto. For more than 25 years, he has been actively researching precise GNSS-focused positioning and navigation solutions and applications. He holds an Honors Bachelor of Science degree and master of science degree in surveying science from the University of Toronto and a Ph.D. in geodesy and geomtics engineering from the University of New Brunswick.
• Adekunle AA, Fofana I, Picher P, Rodriguez-Celis EM, Arroyo-Fernandez OH, Zemouri R. (2025). Optimizing deep learning predictive models: A comprehensive review of RNN and its variant architectures. Applied Soft Computing. Oct 9:114015.
• Biswas T, Banerjee P and Paul A (2022). Impact of low-latitude ionospheric effects on precise position determination. Radio Science, 57(4): 1-11.
• Dabbakuti JK (2021). Modeling and optimization of ionospheric model coefficients based on adjusted spherical harmonics function. Acta Astronautica, 182: 286-294.
• Gonzalez J and Yu W (2018). Non-linear system modeling using LSTM neural networks. IFAC-PapersOnLine, 51(13): 485-489.
• Hochreiter S and Schmidhuber J (1997). Long short-term memory. Neural Computation, 9:1735-1780.
• Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010). Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. Journal of Geophysical Research: Space Physics. 115: A10.
• Kaselimi M, Voulodimos A, Doulamis N, Doulamis A, Delikaraoglou D. (2020). A causal long short-term memory sequence to sequence model for TEC prediction using GNSS observations. Remote Sensing. 12(9): 1354.
• Noor MH and Ige AO (2025). A survey on state-of-the-art deep learning applications and challenges. Engineering Applications of Artificial Intelligence. 159: 111225.
• Osanyin TO, Candido CM, Becker-Guedes F, Migoya-Orue Y, Habarulema JB, Obafaye AA, Chingarandi FS, Moraes-Santos SP (2023). Performance of a locally adapted NeQuick-2 model during high solar activity over the Brazilian equatorial and low-latitude region. Advances in Space Research. 72(12): 5520-38.
• Osanyin TO, Maria Nicoli Candido C, Becker-Guedes F, Migoya-Orue Y, Habarulema JB (2025). Ingestion of GNSS-Derived-TEC Into NeQuick 2 Model Over South America. Space Weather. 23(12): e2024SW004212.
• Reddybattula KD, Nelapudi LS, Moses M, Devanaboyina VR, Ali MA, Jamjareegulgarn P, Panda SK (2022). Ionospheric TEC forecasting over an Indian low latitude location using long short-term memory (LSTM) deep learning network. Universe. 8(11): 562.
• Sarker IH (2021). Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions. SN Computer Science. 2(6): 1-20.
• Seemala GK, Katual I, Kapil C, Vichare G (2023). Seasonal and solar activity dependence of TEC over Bharati station, Antarctica. Polar Science. 38: 101001.
• Seemala GK, Valladares CE. Statistics of total electron content depletions observed over the South American continent for the year 2008 (2011). Radio Science. 46(05): 1-4.
• Thompson Neil C, Kristjan G, Keeheon L, Manso Gabriel F (202). The computational limits of deep learning. Cornell University, arXiv:2007.05558, 10: 2.
• Zhang R, Li H, Shen Y, Yang J, Li W, Zhao D, Hu A (2025). Deep learning applications in ionospheric modeling: progress, challenges, and opportunities. Remote Sensing. 17(1): 124.
Topcon Positioning Systems has signed a commercial agreement with Xona to secure early-adopter access to Pulsar, Xona’s low Earth orbit (LEO) satellite navigation constellation. This agreement positions Topcon among Xona’s first commercial customers preparing to integrate Pulsar into future high-precision positioning workflows.
“The letter of agreement reinforces Topcon’s long-standing commitment to innovation and customer-driven technology leadership,” said Ron Oberlander, head of the Topcon Geomatics Platform. “It lays the groundwork for a new era of high-precision performance possibilities as LEO satellites come online. By proactively adopting next-generation navigation infrastructure, we strengthen our commitment to provide reliable, resilient, and future-proof solutions for our customers.”
“Topcon understands where accuracy, continuity and confidence matter most for operators in the field,” said Bryan Chan, co-founder and VP of Strategy at Xona. “By adding a modern navigation layer into Topcon’s offerings, Pulsar will strengthen signal performance and resiliency in even the most challenging environments, ensuring Topcon customers can operate with greater confidence wherever their work takes them.”
Safran Electronics & Defense has acquired Syntony GNSS, a simulator and receiver company founded in 2015 in Toulouse, France. The acquisition is intended to strengthen Safron’s resilient PNT innovations.
Under the agreement, signed Feb. 13, Safran will take 100% of Syntony’s share capital, subject to customary regulatory approvals. Financial terms were not disclosed.
A European leader in GNSS solutions for underground environments, Syntony has developed unique expertise to ensure reliable positioning in contexts where satellite signals are unavailable.
Syntony’s technology addresses a major challenge of satellite navigation systems: the vulnerability of GNSS signals to physical obstacles, jamming and interference. To tackle this, Syntony has developed several critical technologies, including:
Controlled reception pattern antennas (CRPAs) that make GNSS receivers less sensitive to jamming and spoofing — essential for flight safety and the protection of sensitive infrastructure.
Software-defined radio (SDR), a digital radio that can change function (switching from FM to Wi-Fi or GPS) through a simple software update without changing hardware, allowing it to adapt to threats or to changes in received or transmitted signals. It offers compactness and scalability, particularly suited to embedded systems and the requirements of modern operational environments.
In addition, Syntony develops GNSS receivers for next-generation satellites, particularly for low Earth orbit (LEO) constellations, further strengthening Safran Electronics & Defense’s offering in the space-based PNT and New Space sectors.
Syntony employs nearly 70 people across Toulouse and Paris.
For Safran Electronics & Defense, this acquisition makes it possible to offer more comprehensive equipment that is also more compact and energy-efficient, while remaining adaptable to the constant evolution of signals. These gains in weight and power consumption are essential for future civilian and military platforms (drones and counter-drone systems, missiles, aircraft and low-orbit satellites).
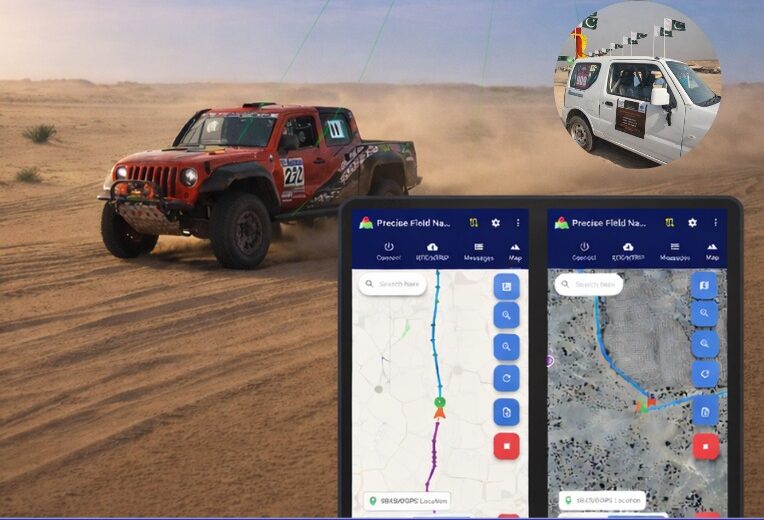
Pakistan’s national space agency SUPARCO (Space and Upper Atmosphere Research Commission) has achieved a major milestone in navigation technology with the successful launch of its Pak-SBAS satellite-based augmentation system (SBAS) device and service.
The Pak-SBAS navigation service was rigorously tested in the extreme desert conditions of Cholistan during Cholistan Desert Rally 2026. The Cholistan desert experinces high speeds, unpredictable routes, and the absence of visual landmarks that demand exceptional positioning accuracy and signal reliability for autos and motorcycles.
Throughout the rally, Pak-SBAS demonstrated remarkable performance by delivering highly precise location data, stable signal continuity, and integrated route tracking.
By applying SBAS corrections, the system significantly reduced positioning errors compared to conventional GNSS technologies, offering rally drivers and navigation teams a new level of confidence essential for competitive desert racing.
According to a SUPARCO spokesperson, the Pak-SBAS technology holds vast potential beyond motorsports. It is expected to enhance disaster response operations through accurate tracking of rescue teams and affected areas, improve transport efficiency via real-time vehicle positioning, and strengthen aviation safety with more reliable navigation support.
The system also will benefit the surveying and mapping sectors by minimizing positional inaccuracies and reducing project costs.
A second MOU was signed with Elistair to introduce tethered unmanned aerial systems into Milanion’s ground and maritime architecture.
The agreements focus on maintaining operational capability in environments affected by electronic warfare, GNSS denial, jamming, spoofing and cyber interference, with technical integration work scheduled to begin after the exhibition and demonstrations planned for later in 2026.
The agreement with NovAtel covers land, maritime and air domains and focuses on operations in contested environments where electronic warfare, GNSS denial and cyber interference are present.
Milanion linked the partnerships to requirements raised by defense delegations at WDS 2026 for unmanned systems that remain operational without dependence on vulnerable networks and that support sovereign-ready integration.
Technical integration discussions with both companies are scheduled to begin immediately after the exhibition. Joint development pathways and capability demonstrations are planned later in 2026 as part of a broader connected autonomy architecture.
Milanion Group was founded in 2020 and is headquartered in the UK, with manufacturing in Abu Dhabi. The company develops autonomous and optionally manned systems for military and security missions across land, sea, and air.
The MOU with NovAtel will embed NovAtel assured-PNT and anti-jam technologies into Milanion assets to maintain navigation accuracy and mission integrity during GNSS denial or interference. The integration supports secure routing, guidance stability, and targeting precision even when GPS signals are degraded or disrupted. This capability is relevant for unmanned ground vehicles, maritime conversions, and airborne systems operating in electronically contested theatres. Milanion links the functionality to survivability and operational continuity during electronic warfare and cyber-disruption scenarios.
By combining assured navigation with persistent ISR and resilient communications, the company aims to maintain autonomous mission performance across multi-domain deployments. The approach integrates sensing, navigation, and communications into a unified architecture to address contested-environment requirements identified at WDS 2026.
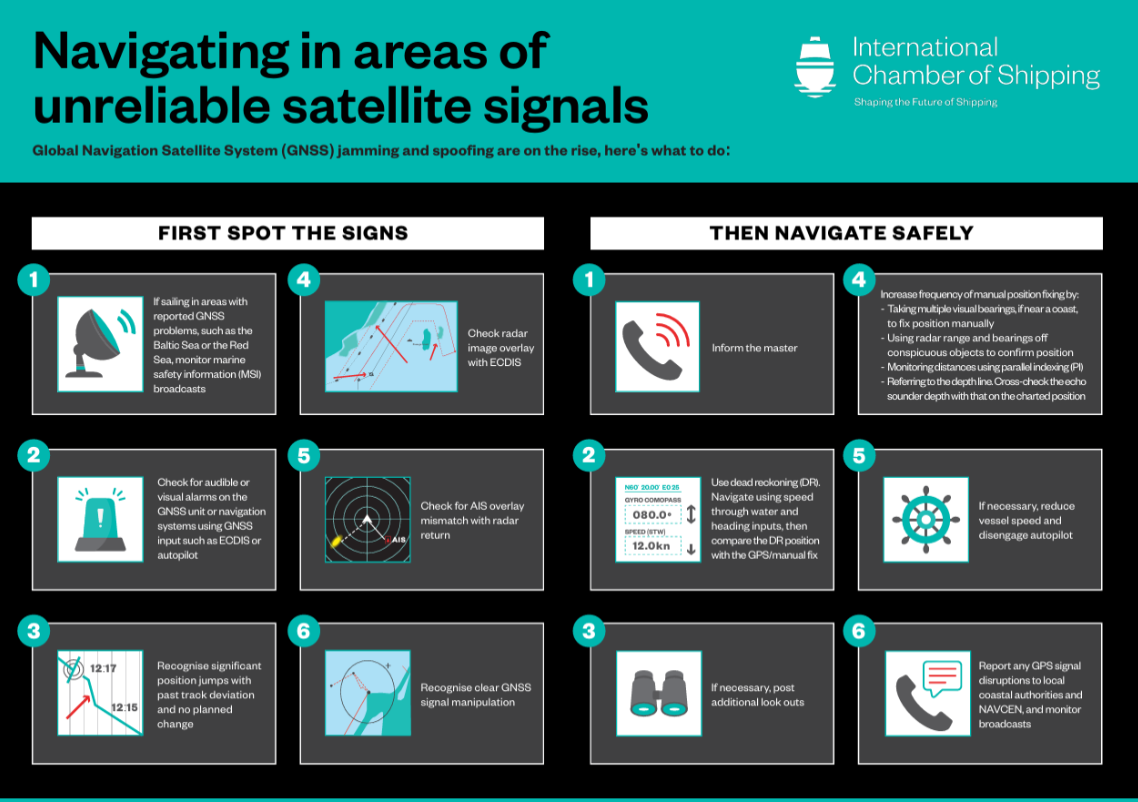
The International Chamber of Shipping (ICS) and its members have produced an informational poster for ship crews that highlights strategies when GNSS signals are jammed or denied.
The Navigating in Areas of Unreliable Satellite Signals poster is available for free on the ICS website. Crews are welcome to download and print it for display near the conning position on board navigation bridges.
Modern maritime operations depend heavily on GNSS. From open-ocean routing to precise harbour maneuvers, satellite-based positioning data is deeply embedded in ship systems, port logistics, traffic monitoring and safety infrastructure.
This reliance, however, has created a growing vulnerability. Incidents of GPS jamming and spoofing, once a military concern, now increasingly affect merchant ships at sea and near ports. Without proactive preparation and mitigation, interference with satellite navigation threatens vessel safety, global trade efficiency, port operations and maritime security.
To support crews facing these incidents, the poster helps bridge officers identify the signs of compromised satellite signals and recommends best practices to maintain safe navigation.
“The safety of our seafarers, ships, and the environment is critical,” said Gregor Stevens, ICS Nautical Director. “With ever-increasing frequency of jamming and spoofing of GPS, this new free resource helps seafarers recognize the warning signs and provides guidance on navigating these waters safely.”
Dedicated research and development, funded by European Union (EU) and European Space Agency (ESA) programs over the years, has played a key role in Galileo Second Generation.
Among the innovations that will benefit the new satellites are the development of new atomic clocks, links that allow the satellites to “talk” to one another in orbit and a prototype ground station that can precisely pinpoint satellites in the sky. These advanced technologies will ensure Galileo continues to provide world‑class positioning, navigation and timing to users worldwide.
The importance of R&D
Satellite navigation is constantly evolving, with new technologies being deployed. But before a technology can fly on a satellite, it must be derisked and qualified. This is where research and development (R&D) comes in, laying the groundwork for new technologies long before they see the light of day.
Horizon 2020 and Horizon Europe are R&D programs funded by the EU. A significant budget from these programmes is delegated to ESA for R&D to derisk new technologies for evolutions of Europe’s Galileo and EGNOS systems.
Complementing these EU R&D programs, ESA programs such as the General Studies Programme (now Discovery and Preparation), General Support Technology Programme and the former European GNSS Evolution Program (EGEP) have also performed R&D for future satellite navigation technologies.
R&D spurs the innovation that allows Galileo and EGNOS to modernise and develop new applications and services. Several activities funded through these programmes have contributed to Galileo Second Generation (G2). Some of these technologies will already fly on the G2 satellites when they are launched in the coming years.
New ways of keeping time
Galileo relies on highly precise onboard atomic clocks to ensure accurate global positioning and timing. Here, an iodine optical clock by SpaceTech, Germany (Credit: ESA)
Galileo delivers world-class positioning and timing, and its onboard clocks are the key to its performance. Each first generation Galileo satellite carries two passive hydrogen maser and two rubidium atomic frequency standard clocks. These clocks, developed by Leonardo and Safran Timing Technologies, respectively, are currently Galileo’s only space-qualified clocks.
A rubidium pulsed optically pumped (Rb POP) clock by Leonardo, Italy. (Credit: ESA)
To keep up with the latest technologies and allow for a broader diversity of European qualified clocks, R&D activities have encouraged European companies to develop new types of space-worthy atomic clocks. This investment is critical due to the time and expertise it takes to develop such complex and sensitive technologies. These activities aimed to develop alternative atomic clocks for Galileo that can improve performance and robustness and support Europe’s place as a leader in satellite navigation.
A Mercury ion clock (MIC) from Safran Timing Technologies, Switzerland. (Credit: ESA)
Seven innovative clock technologies were developed by European companies from France, Germany, Italy and Switzerland. After initial development activities, three of these clocks — proposed by Leondardo, SpaceTech and Safran Timing Technologies — were selected to progress to hardware development in preparation for a first flight.
Leonardo’s Rubidium Pulsed Optically Pumped clock is currently under development and planned to fly as an experimental clock on a Galileo Second Generation satellite. The Iodine Optical clock developed by SpaceTech is undergoing early development and shows potential for future use as an experimental clock on Galileo satellites. The Mercury Ion clock by Safran Timing Technologies recently launched its development activities.
Following an analysis of the clocks’ eventual in-orbit performance, a programme decision by the European Commission will be made before starting the operational phase of these new clock technologies.
Conversations in the sky
An intersatellite link transceiver by Thales Alenia Space. (Credit: ESA)
The Galileo system currently relies on links between satellites and ground stations to monitor and control the satellites and to determine the onboard clock skew. Clock skew occurs when a clock signal reaches different parts of a system at different times, which can cause errors in position calculations.
Galileo Second Generation will introduce inter-satellite links (ISL), allowing the satellites to ‘talk’ directly to one another in orbit. This will enable additional time synchronisation and ranging measurements that will improve knowledge of the satellites’ orbit and clock skew.
ISL will also allow faster data dissemination. If a particular satellite is not visible to a ground station, information can be sent to a different satellite and then passed on instead of waiting for the satellite to be visible.
An intersatellite link transceiver by Airbus Defence and Space. (Credit: ESA)
Two early models of ISL transceivers that are essentially identical to those which will fly on the Galileo Second Generation satellites were designed and developed. The transceivers, which can both send and receive signals, were developed by Thales Alenia Space (Spain) and Airbus Defence and Space (Germany).
One of these transceivers is about to enter the formal testing phase, while the other has undergone successful environmental qualifications. After the transceivers have completed their qualifications and testing, they will be ready for their trip to space.
Precisely pinpointing satellites
Accurate positioning, navigation and timing relies on knowing precisely where satellites are in their orbits. Galileo satellites are located by tracking their L-band antenna transmissions from the ground. Each satellite also has a laser retroreflector, which allows measurement of their orbit to within a few centimeters. Known as satellite laser ranging (SLR), this method measures the time it takes for a laser pulse to make the trip from a ground station, called an SLR station, to the satellite and back, then uses these measurements to determine the satellite’s orbit. Presently, SLR stations are owned and operated by scientific community users and serve multiple space missions.
One of the challenges of current SLR is the fact that the lasers are not safe for human eyes and cannot be used if an aircraft is flying nearby as the lasers could blind the pilots. This means SLR stations must coordinate with civil aviation and may not be allowed to use all parts of the sky. SLR stations also have limited availability due to local atmospheric conditions (clear skies are key), and low levels of automation (intensive need for human operators).
A prototype satellite laser ranging station in Matera, Italy. (Credit: ESA)
To mitigate these limitations, a modernized, eye-safe SLR station prototype for Galileo satellites has been developed by DiGOS (Germany) and commissioned in Matera, Italy. Due to the station design and laser wavelength used, there will be no need to coordinate with civil aviation. The station’s new technologies also explore increased automation using a predefined schedule to reach satellites. Although human operators are still needed, their workload is reduced.
A field campaign of the prototype SLR station is planned for this year as part of the Galileo Second Generation System Test Bed tasks. It will evaluate the potential benefits of SLR as a complement to L-band ground ranging. If the station is added to the Galileo ground segment, it could enhance the system’s robustness by providing an independent means of determining the satellites’ locations. In this case, interface design adjustments would need to be made to allow operational use of the station.
Beyond providing another method for determining Galileo satellite orbits, this station could also help contribute to the Galileo Terrestrial Reference Frame and could support ESA navigation scientific missions such as Genesis.
The platform now supports multi-sensor, multi-drone detection in real time for counter UAS applications. It delivers true threat assessment and early warning — detecting, tracking and identifying — to empower on-site and remote operators to make split-second decisions regarding airspace activity. The platform is sensor agnostic and easily integrated into existing systems through open APIs.
The update dramatically improves assessing risk from small, low-flying drones in complex airspace, such as public events, critical infrastructure and battlespaces.
The platform
The MatrixSpace AI Platform consists of MatrixSpace AiEdge, the company’s intelligent sensor operating system, and MatrixSpace AiCloud, a software-as-a-service that collects data from AiEdge-enabled sensors for a unified view of airspace activity. Unlike other offerings retrofitted for AI, MatrixSpace AiEdge and AiCloud are AI-native, making information rapidly actionable and easier to comprehend.
MatrixSpace AiEdge, embedded in every MatrixSpace system, provides actionable intelligence at the point of sensor data collection. It detects, classifies and tracks multiple object types, removing clutter to present a relevant picture of aerial activities, while fusing feeds from different sensors.
AiEdge fuses detections from MatrixSpace radars with complementary sensors such as Remote ID and ADS-B into a single, real-time track. By correlating multi-sensor data at the edge, AiEdge creates a common data representation and cues PTZ (pan-tilt-zoom) cameras for rapid visual confirmation, passing high-confidence tracks to the cloud for enterprise-level analysis.
Sitting above distributed AiEdge deployments, MatrixSpace AiCloud simplifies the management of geographically diverse sensor networks into a single, unified view. Instead of a bank of monitors displaying individual sensor feeds, AiCloud provides operators with clear visibility into low-airspace activity, alerts, and warnings across all protected sites — accessible on any device.
MatrixSpace AiCloud combines fused, real-time data from radar, optical, ADS-B and Remote ID sensors to deliver consistent object tracking and actionable threat intelligence at scale. Within AiCloud, whitelisting and threat classification determine whether objects are friendly, unknown, or hostile, enabling fast, coordinated operator response. Local sensors continue operating autonomously when cloud connectivity is disrupted, with all activity synchronized for review once connectivity is restored.
Divirod and Oki Electric Industry (OKI) have completed a project to monitor landslide risk and slope stability across vulnerable areas in the Fukuoka Prefecture of Japan. The project deployed Divirod’s next-generation ground deformation and anomaly-detection technology to provide continuous, high-resolution monitoring of mountainous terrain prone to extreme rainfall and seismic activity.
The initiative supports Japan’s broader effort to enhance early-warning capabilities and strengthen climate resilience following recent years of severe rainfall disasters and complex terrain-related hazards.
Monitoring with GNSS-R technology
For the project, Divirod designed a system comprised of GNSS-Reflectometry (GNSS-R) sensors and intelligent algorithms and deployed it across three areas of interest collecting continuous, all-weather measurements throughout the monitoring period. Divirod’s proprietary algorithms examined daily GNSS-R measurements to detect even subtle changes in the ground surface.
Divirod’s system successfully classified the observed terrain changes into three key physical categories:
Slope failure events,
Creep/slow-moving landslides, and
Temporary terrain changes (often linked to rainfall or ground moisture variations).
Hundreds of terrain changes were detected across the monitored regions and correlated with rainfall measurements and earthquake events. The results enabled detailed risk mapping and precise identification of active zones.
The technology proved highly sensitive in differentiating short-lived disturbances from long-term geomorphological changes — an essential capability for early intervention and warnings.
Documented landslide at Hakikoga
A significant project highlight was successful detection of a real landslide event in August. While comparison images taken on Aug. 10 and 11 revealed visible changes in the slope during daylight hours, Divirod’s terrain change maps show that the slope movement itself occurred overnight, a time when on-site cameras were unable to observe the event due to darkness.
Despite the lack of visual evidence, Divirod’s GNSS-R sensors registered a distinct spike in ground-movement, accurately detecting the terrain shift and providing clear evidence of a nocturnal landslide that could have otherwise gone unnoticed.
Strengthening the disaster-preparedness ecosystem
Divirod’s collaboration with OKI represents a significant advancement in real-time terrain intelligence for Japan, a region characterized by frequent typhoons, intense rainfall and high seismicity. The successful deployment in the Fukuoka Prefecture presents new opportunities for:
scalable early-warning systems,
automated landslide risk modeling,
and the integration of GNSS-R sensing with existing monitoring infrastructure.