Garmin has released the Xero L60i, a GNSS-enabled rangefinding monocular. The rangefinder’s optics providea sharp, bright view through augmented reality technology that overlays graphics in full color, including distance, maps and navigation and more — all while ranging targets out to 3600 meters through 7X magnification.
Integrated navigation features include Laser Locate, Sensor Locate and Visual Recall, giving wildlife enthusiasts, researchers, search-and-rescue teams tools they can depend on, the company said.
Xero L60i features
Digital mapping. View current and ranged locations marked on topographic mapping and use the Xero L60i to navigate to them.
Smart Integration. Waypoints can be shared to the Garmin Explore App on a compatible smartphone, then shared to a compatible Garmin handheld or wearable device using the Garmin Share functionality.
Laser Locate. Leverage the range taken, along with compass heading and GPS coordinates, to project a waypoint on the display, then navigate to the waypoint through directional cues.
Sensor Locate. When the desired object is too far to range, built-in GPS, compass, inclinometer and mapping can calculate and project a waypoint of the intended target, allowing estimated ranges to targets several miles away.
Visual Recall. When moving to a new vantage point after ranging, on-screen cues steer the visual field back to a previously marked waypoint.
The rangefinder features fully multicoated, low-dispersion glass, which provides sharp optics with a flat field of view, accurate color fidelity, and superior light transmission. During dawn or dusk use, an ambient light sensor automatically controls display brightness, ensuring the visual scene remains clear.
Range animals to 2,775 meters and trees to 3,600. In optimal low-light conditions, the Xero L60i makes it possible to reach as far as 7,000 meters to retro reflective objects while achieving accuracy of +/- .25 meters under 1,000 meters and +/- 1 meter out to maximum laser-ranged distances.
CHC Navigation (CHCNAV) has released the Apache 6–2026 Edition, an integrated unmanned surface vessel (USV) designed for high-resolution bathymetric and 3D mapping applications. Built to accommodate NORBIT multibeam echosounders, the Apache 6 delivers a comprehensive solution for underwater surveying, object positioning, and offshore construction support in varying aquatic conditions.
The Apache 6 – 2026 Edition is optimized for seamless integration with the NORBIT iWBMS and WINGHEAD series of multibeam echosounders. An optional NORBIT iLiDAR can also be integrated, allowing for the simultaneous collection of marine and terrestrial 3D data in a single pass. This capability is particularly efficient for projects that require mapping both underwater topography and overhead structures, such as bridges and power lines, making it a comprehensive tool for harbor, river and infrastructure surveys.
Automated Sound Velocity Profiling Accurate sound velocity measurement is fundamental to high-quality bathymetric data. The Apache 6 – 2026 Edition addresses this with an optional automated sound velocity profiler (SVP) kit. This system can be controlled directly from the remote controller, allowing the operator to perform SVP casts on-demand without interrupting the survey workflow. The kit is designed for rapid deployment — attachable or detachable in under a minute — ensuring that the multibeam echosounder data is continuously corrected with the most accurate sound speed information, which is critical for meeting stringent survey specifications.
The USV combines a detachable triple-hull vessel design with smart rotating propeller technology to deliver both stability and agility in varied conditions. The robust hull configuration ensures reliable performance in strong currents, while removable side floats enable safe operations in shallow waters. Intelligent propeller control adjusts water flow direction to achieve a turning radius of approximately two meters, supporting effective navigation in confined or winding channels.
Android-Based Control Survey operations are streamlined through an intelligent Android remote controller, which provides real-time access to vessel status and data without the need for a separate field computer.
The interface allows for straightforward management of the survey workflow, while a multi-link communication system ensures reliable data transmission over long distances. This setup enables surveyors to maintain seamless control over the Apache 6 and monitor mission progress effectively from the shore.
Tokyo-based satellite company ArkEdge Space Inc. has signed letters of intent with three international organizations to develop a PNT satellite network in low-Earth orbit (LEO).
The agreements with TrustPoint Inc., the Royal Institute of Navigation in the United Kingdom and FrontierSI aim to strengthen satellite-based PNT capabilities for civil, commercial and security applications.
The collaboration represents an early phase in ArkEdge Space’s effort to build international partnerships for PNT infrastructure. The company, which designs and operates small satellite constellations, said the project will focus on improving resilience of positioning and timing systems that support critical infrastructure.
The partners plan to examine policy frameworks and national PNT strategies as the project moves into a demonstration phase. ArkEdge Space said it will expand its network of international partners to support the development of space-based positioning systems.
“By working together, this collaboration represents an important step as we accelerate the development of resilient, trusted PNT capabilities that support critical infrastructure and informed decision-making worldwide,” ArkEdge Space CEO Takayoshi Fukuyo said.
TrustPoint has transmitted its first Low-Earth Orbit Navigation System (LEONS) time-transfer and tracking signals from a ground node to spacecraft in orbit. The milestone advances the development of commercial navigation infrastructure independent of GPS.
GNSS satellites require knowledge of their own time and orbital position to provide accurate data to Earth-based users. Most LEO spacecraft currently rely on GPS or medium-Earth orbit (MEO) signals for that information. Interference and jamming are increasingly affecting these LEO connections, degrading or blocking signals.
LEONS provides GPS-independent time transfer and orbit tracking. Initially developed for TrustPoint’s planned constellation, the system can be adapted for other LEO operators requiring timing and navigation for their spacecraft. The ground-to-space infrastructure is designed to support a GPS-independent PNT layer in orbit.
“With the pace of modern threats accelerating, the difference between concepts and capabilities matters,” said Nicole Hilliard, director of government programs at TrustPoint. “This milestone demonstrates that commercial partners can field resilient, GPS-independent PNT capabilities that strengthen national security architectures and justify continued investment in companies that deliver.”
The demonstration supports TrustPoint’s participation in the SpaceWERX AltPNT Challenge, which awarded the company two contracts to develop alternative PNT capabilities. The program seeks to deploy new options for precise, dual-use PNT systems.
The nearly $1 million contract covers delivery of approximately 100 dual-antenna GPS/GNSS compasses for land-based applications.
Arazim Navigation Systems, an Israeli manufacturer of inertial navigation systems, has received a new order valued at nearly $1 million from an Israeli defense customer. The order includes 100 units of the HPLS-2G GPS/GNSS compass, designed to provide heading and attitude information for static land-based systems using dual-antenna GPS technology.
According to Arazim, the HPLS-2G NFS system is a rugged, MIL-STD-compliant device built to operate in harsh environmental conditions and hostile operational environments.
“This continued trust represents more than another contract; it reflects confidence in the reliability, performance, and ongoing development of our navigation solutions,” Sason Noama, CEO and founder of Arazim Navigation Systems, said. “For years, our technology has supported critical operations where precision and resilience are essential. This order further underscores Arazim’s role as a trusted provider of advanced navigation and situational awareness systems for defense and security organizations.”
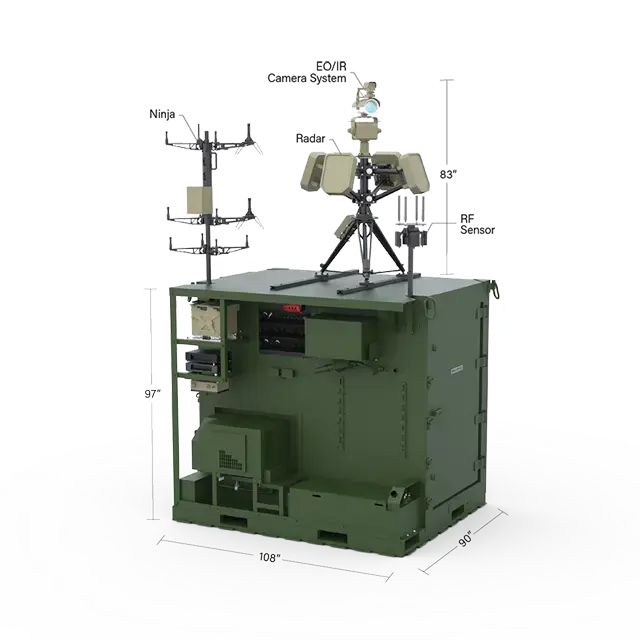
The U.S. Air Force has awarded Trust Automation a $490-million indefinite delivery, indefinite quantity (IDIQ) contract for the rapid research, development, prototyping, demonstration, evaluation, production and transition of unmanned and counterunmanned aircraft system (CUAS) capabilities.
As Trust Automation looks ahead to 2026 and beyond, this program represents a pivotal step in addressing the evolving challenges of modern warfare. Work will be performed at Trust’s facility in San Luis Obispo, California, and is expected to be completed by Aug. 20, 2030.
Image: Trust Automation
“We’re incredibly proud to have been selected for this critical C-UAS project,” said Ty Safreno, Trust’s chief executive officer. “This contract underscores our commitment to developing cutting-edge anti-drone technologies that address our most pressing security challenges, protect our armed forces and contribute to the safety of our nation.”
Trust is a field-proven leader in defense and counter-small unmanned aircraft system (C-SUAS) technologies to directly counter UAS activity in C2 and GNSS bands. At the core of its product suite is the Small-Unmanned Air Defense System (SUADS), which delivers fixed-site, such as Air Force base defense operations centers (BDOC), and rapidly deployable protection for key facilities and units in combat zones. These systems provide layered defense with adaptable modular solutions to detect, track and defeat Group 1, 2 and 2+ aircraft threats.
Complementing SUADS is the weapons-mountable GAT UAS Jammer, which enables personnel to directly counter UAS activity in GNSS bands. Together with a broader suite of radio frequency products, Trust equipes warfighters with scalable options to secure critical operations against evolving UAS threats.
As Trust Automation rolls into 2026, the company remains dedicated to its mission to deliver innovative, reliable and mission-critical technologies that empower the U.S. Air Force and other defense partners to stay ahead of emerging threats.
Firmware upgrade available for Xsens Sirius and Xsens Avior motion sensors delivers centimeter-level vertical displacement measurement for marine stabilization and control systems
Xsens has announced a major capability upgrade for its industrial-grade Xsens Sirius and Xsens Avior inertial measurement units (IMUs). The new Heave feature delivers centimeter-level vertical displacement measurement, enabling real-time stabilization and wave compensation in a wide range of marine applications.
Marine engineers can now access comprehensive motion data — roll, pitch, yaw and Heave — from a single compact sensor. This eliminates the need for external processing or for oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The Heave output operates at up to 100Hz, providing the real-time response needed in active stabilization and wave compensation systems. All processing happens on-device, simplifying system integration and reducing latency.
Xsens motion reference units (MRUs) — IMUs with Heave capability — deliver real-time Heave accuracy better than 5 cm for wave periods up to 29 s. This covers most marine applications. For longer wave periods up to 40 s, accuracy is approximately 6cm, twice the range supported by comparable industrial-grade MRUs.
“Engineers now get vertical displacement data directly onboard, alongside roll, pitch and yaw,” said Ayush Sharma, Algorithms Engineer at Movella. “This gives marine customers the complete motion reference they need for stabilization and compensation systems, without the size or certification overhead of tactical MRUs.”
The algorithm uses proprietary phase correction and bias estimation to mitigate the effect of drift over extended operating periods. Users can also define offset points — center of rotation (COR) and point of interest (POI) — ensuring that Heave values reflect the true motion of the vessel or payload, even when the MRU is installed away from the POI.
The Heave algorithm is available for download immediately as a firmware update for existing Xsens Sirius and Xsens Avior units in the field, with no hardware modifications required. All new units ship with the feature integrated. Heave output is enabled with a single setting in the MT Manager software or the Xsens software development kit (SDK).
Designed for straightforward integration
Xsens Avior is a compact OEM module for embedded system designs.
Xsens Sirius is a standalone MRU in a rugged IP68 housing for harsh environments. It meets MIL-STD-202 requirements.
Both products support RS-422, CAN, and UART interfaces. Development kits are available for prototyping, with free SDKs for C/C++, Python, ROS1, ROS2, and MATLAB. All units meet CE, FCC, and RoHS regulatory requirements, and are ITAR-free.
Xsens Avior and Xsens Sirius MRUs are available globally from Movella and authorized partners. For specifications, datasheets, and ordering information, visit www.movella.com/products/sensor-modules or contact a Movella sales representative.
Throughout the past several decades, GNSS has become one of the most significant technologies in modern engineering, supporting transportation, communications, finance, emergency response, and critical infrastructure [1]. Its precision, global reach, and reliability have enabled entire industries to scale in ways that would otherwise have been impossible. Yet as GNSS is used more deeply in autonomy-driven and safety-critical domains, the limitations of relying on a single-layer PNT architecture are becoming increasingly apparent.
Urban canyons degrade satellite geometry and tracking performance; intentional and unintentional interference is now commonplace [2]; spoofing has shifted from a theoretical concern to an operational reality; and indoor environments, which are essential for robotics, logistics, and emergency services, remain largely outside GNSS’s physical reach. These challenges are not shortcomings of GNSS itself. They reflect what the system was originally designed to provide: a globally available positioning and timing reference, not the entire resilience burden for every PNT-dependent application.
In parallel, communications technologies have undergone rapid transformation. The evolution from LTE to 5G, and soon to 6G, has introduced wider bandwidths, massive MIMO antenna arrays, improved network synchronization, and dense deployment across urban and indoor environments [3]. At the same time, LEO broadband constellations have matured into powerful satellite infrastructures capable of delivering strong signals, rapid Doppler dynamics, and frequent visibility. Although these systems were built primarily for data connectivity, their physical characteristics naturally lend themselves to positioning and timing.
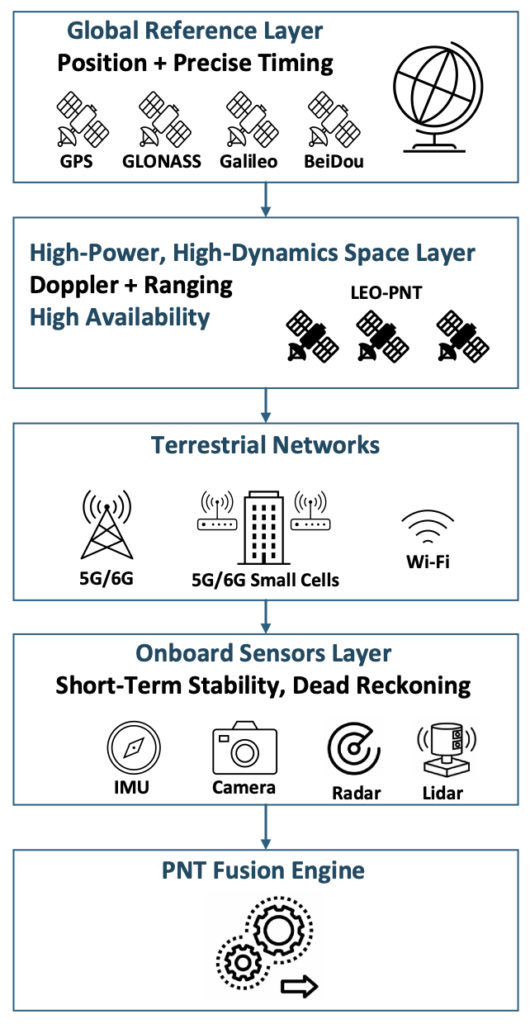
Taken together, these developments point toward a new direction for resilient PNT: a multi-layer architecture in which GNSS serves as the global reference layer and is complemented by high-power, high-dynamics LEO satellites, terrestrial 5G/6G networks and Wi-Fi systems, and a suite of onboard sensors that provide short-term stability and dead-reckoning capability. Figure 1 illustrates this emerging architecture and highlights how each layer contributes specific observables, coverage strengths, and levels of robustness. The remainder of this article examines the physical foundations of communications-based PNT, the role of LEO as an augmentation space segment, the engineering challenges inherent in multi-source navigation, and the system-level architecture that is now taking shape to deliver resilient and ubiquitous PNT.
Figure 1. Multi-layer architecture for resilient PNT. (All figures provided by the author)
2. 1 Growing Dependence on PNT and GNSS Vulnerability
Nearly every sector of modern life depends on GNSS-based positioning and timing. As reliance grows, exposure to GNSS limitations grows with it. Dense urban environments create severe multipath and signal blockage; jamming and spoofing incidents are now regularly reported near conflict zones and busy ports [4]; and autonomy concepts in aviation and ground mobility increasingly assume reliable PNT even when GNSS performance is degraded or unavailable.
GNSS will remain the global reference layer, but it was never intended to carry the full burden of these mission-critical demands on its own. A complementary set of technologies is needed, systems that continue to function in GNSS-challenged environments and provide redundancy when satellite signals are unavailable, corrupted, or intermittent.
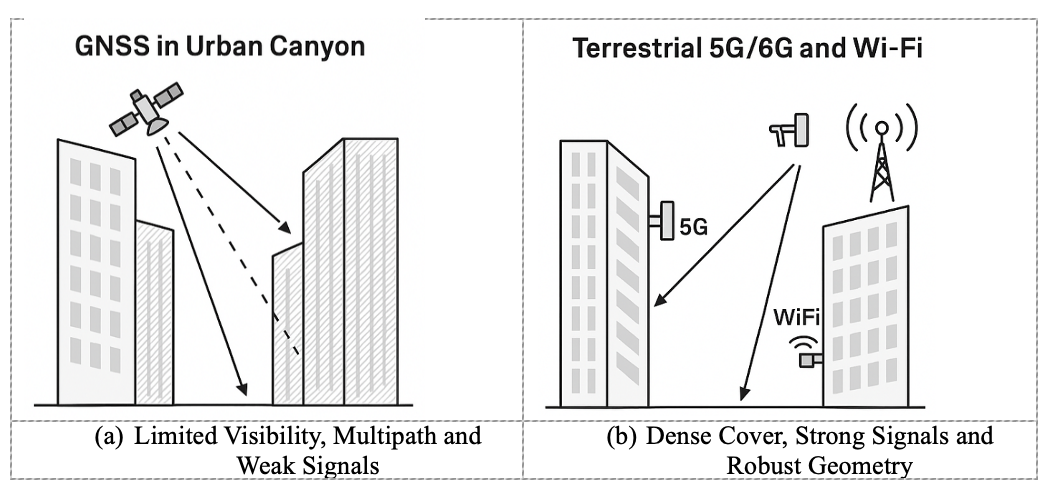
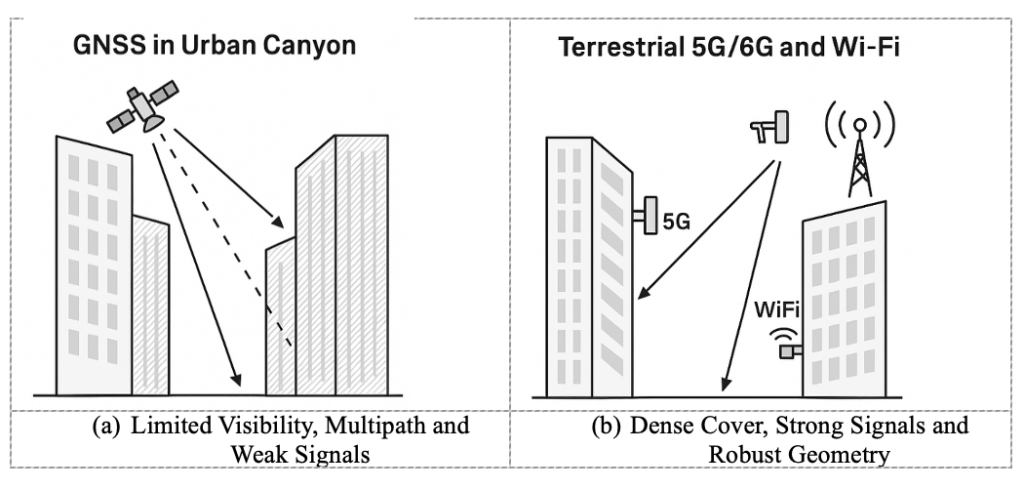
Error! Reference source not found. illustrates this challenge in a representative urban-canyon environment. Tall buildings restrict line-of-sight to GNSS satellites and generate strong multipath reflections, resulting in weak and unreliable signals (Figure 2a). By contrast, terrestrial networks such as 5G/6G and Wi-Fi maintain strong signal levels and robust geometry because their transmitters are embedded within the built environment, often only tens or hundreds of meters away (Figure 2b). This complementary coverage is a fundamental motivation for integrating communications signals into future PNT architectures.
Figure 2. Comparison of GNSS and terrestrial network coverage in urban canyons.
2.2 Communication Networks Have Quietly Become PNT-Capable
Modern communication networks have evolved far beyond their original purpose of data transport [5]. Several physical-layer characteristics now make 5G, Wi-Fi 7, and future 6G systems surprisingly well suited to PNT:
Wideband signals. Wi-Fi 7 supports 320-MHz channels and 5G FR2 offers up to 400 MHz, with multi-GHz bandwidths anticipated for 6G [6]. Wider bandwidth directly improves time-of-arrival (ToA) precision. The ToA uncertainty can be approximated by:
Massive MIMO. Multi-element antenna arrays estimate angle-of-arrival (AoA) and angle-of-departure (AoD), effectively turning base stations into spatial sensors capable of separating line-of-sight from multipath.
Dense deployment. Unlike GNSS satellites, orbiting at roughly 20,000 km, terrestrial networks are woven directly into the environment. Small cells and access points provide excellent geometry in exactly the locations where GNSS performance is weakest, including city centers, campuses, factories, and warehouses.
High signal power. Terrestrial signals arrive at the receiver tens of decibels stronger than GNSS, improving indoor penetration, acquisition speed, and robustness to interference.
These features were introduced to enhance connectivity, yet they collectively create an RF landscape that is inherently PNT-capable.
2.3 The Rise of LEO Constellations as a Complementary Space Layer
A third major driver behind communications-enabled PNT is the rapid proliferation of LEO satellite constellations. Broadband systems such as Starlink and OneWeb, together with several emerging PNT-dedicated LEO constellations, offer distinct advantages [7]:
Stronger received power. LEO satellites operate at altitudes of roughly 500–1,200 km, far closer than GNSS satellites at 20,000 km or higher, resulting in significantly stronger received signals.
Rapid Doppler dynamics. The relative motion of LEO satellites produces large, fast-varying Doppler shifts, which improve observability of user velocity and, over short intervals, position.
Large constellation sizes. Hundreds or thousands of satellites create rich geometry and frequent visibility, enhancing availability and resilience.
Although many LEO systems were designed primarily for communications, their signals can already be exploited opportunistically for positioning and timing. Purpose-built LEO-PNT systems extend these capabilities by offering wideband navigation signals, multi-frequency operation, and security features intended specifically for resilient PNT [7].
These characteristics make LEO a natural augmentation layer, strengthening GNSS performance and providing additional robustness in degraded, obstructed, or contested environments.
3. Technical Foundations of Communications-Based PNT
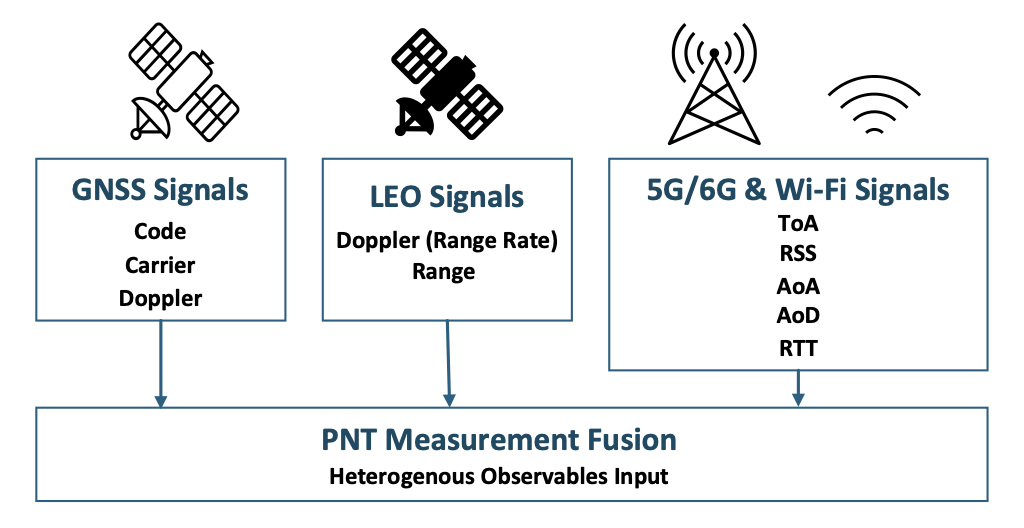
Modern communication and LEO satellite systems provide a diverse set of physical-layer measurements that can be fused with GNSS to create a resilient, multi-layer PNT solution. These observables go well beyond traditional GNSS code and carrier measurements and include Doppler, ranging, time-of-arrival, round-trip time, angle-of-arrival, angle-of-departure, and received signal strength. Figure 3 summarizes this heterogeneous measurement landscape and shows how each layer contributes distinct observables to the fusion engine.
Figure 3. PNT measurement diversity across GNSS, LEO-PNT, and terrestrial networks.
3.1 High-Resolution Ranging from Wideband Waveforms
Ranging accuracy is fundamentally linked to signal bandwidth. GNSS signals typically occupy 1–20 MHz, whereas modern communication waveforms may span hundreds of megahertz. Wider bandwidth enables finer temporal resolution, allowing receivers to separate closely spaced multipath components and improve time-of-arrival (ToA) precision [6].
In practice, Wi-Fi 7 and 5G FR2 waveforms can support sub-meter ranging in favorable conditions and substantially enhance relative positioning indoors and in dense urban environments. Techniques such as two-way ranging, cooperative localization, and inertial smoothing can extend performance even further. As shown in Error! Reference source not found., these wideband ToA and RTT observables form an essential input to the PNT measurement fusion layer.
3.2 Spatial Sensing with Massive MIMO
Massive MIMO arrays are one of the most powerful enablers of communications-based PNT. By comparing the phase and amplitude across many antenna elements, base stations estimate angles of arrival (AoA) and departure (AoD), turning terrestrial infrastructure into distributed RF sensor arrays [8].
Angle-based measurements offer several important benefits:
Improved localization geometry in 3D urban canyons
Ability to distinguish line-of-sight (LOS) from multipath
High update rates suitable for UAVs and advanced air mobility (AAM) platforms
A simplified Cramér–Rao lower bound (CRLB) illustrates how antenna geometry and signal power influence the accuracy of AoA estimation:
3.3 Infrastructure Density and Geometric Strength
From a PNT perspective, measurement geometry can be as important as measurement precision. Dense deployments of base stations, small cells, and access points give 5G, 6G, and Wi-Fi networks inherently strong geometric diversity, especially in environments where GNSS geometry collapses.
In indoor settings or street canyons, a receiver may have ten or more RF sources within a few hundred meters. This density improves dilution of precision (DOP), increases redundancy, and enables fallback positioning even when GNSS availability drops to zero. Within the multi-layer architecture described in Figure 1, terrestrial networks therefore provide crucial observability in GNSS-restricted environments.
3.4 High Signal Power and Robust Tracking
Terrestrial and LEO communication signals enjoy a link-budget advantage of roughly 50–100 dB over GNSS. This additional power yields several practical benefits:
Better performance with small or non-ideal antennas
Increased resilience to interference and jamming
Faster acquisition and re-acquisition after outages
More reliable tracking under fast dynamics or partial obstruction
In many scenarios, 5G, Wi-Fi, and LEO signals remain trackable long after GNSS signals fall below usable thresholds, providing essential continuity for navigation filters and multi-sensor fusion engines.
3.5 Timing and Synchronization in Communication Networks
Modern wireless networks rely on tight synchronization for scheduling, beamforming, and coordinated MIMO. They obtain timing from GNSS, fiber distribution, and packet-based protocols such as IEEE 1588 Precision Time Protocol (PTP) [9]. As these timing infrastructures mature, communication networks increasingly become timing providers rather than solely timing consumers.
Although terrestrial networks do not yet match the long-term stability of GNSS-disciplined oscillators, they provide valuable short-term holdover and regional timing continuity. These capabilities play an important role in multi-layer PNT systems, particularly during GNSS outages.
4. Engineering Challenges and Limitations
Although communications-based PNT provides powerful complementary capabilities, significant engineering challenges remain. These challenges do not diminish the value of multi-layer PNT; rather, they highlight the technical rigor required to deploy these systems reliably on a scale.
4.1 Multipath and Non-Line-of-Sight Propagation
For terrestrial PNT, multipath and non-LOS propagation remain the dominant contributors to ranging and angle errors. Buildings, vehicles, reflective indoor structures, and metallic industrial environments introduce secondary paths that bias ToA, RTT, AoA, and Doppler measurements. A simplified model of multipath-induced ToA bias is:
Massive MIMO beamforming, high-resolution channel estimation, and machine-learning LOS classifiers can mitigate these errors, but performance is highly environment-dependent and cannot be guaranteed in all cases. Figure 3, introduced earlier, highlights how diversity in measurement types helps reduce susceptibility to any single error mechanism.
4.2 Synchronization Constraints and Timing Drift
Communication networks require precise time alignment for scheduling, beamforming, and coordinated MIMO. However, network clocks do not yet match the long-term stability of GNSS-disciplined oscillators. Backhaul delay variability, oscillator drift, and partial GNSS visibility at base stations introduce timing uncertainty that must be explicitly modeled in a PNT fusion engine.
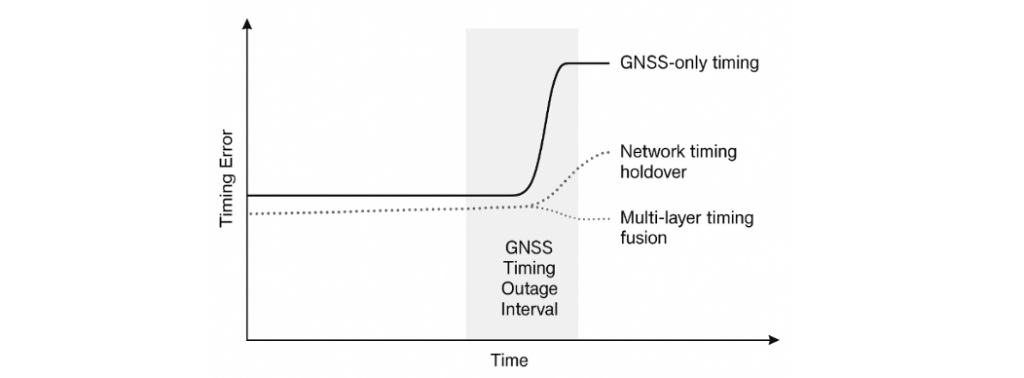
Figure 4 illustrates timing error growth during a GNSS outage, comparing:
GNSS-only timing, which diverges quickly without satellite visibility
Network timing holdover, which slows but does not halt drift
Multi-layer timing fusion, which maintains the lowest error accumulation
These behaviors demonstrate why communication-based timing is best used as a complementary layer rather than a standalone reference.
Figure 4. Timing error comparison during a GNSS timing outage.
4.3 Waveform and Structural Limitations
Modern communication waveforms such as OFDM were optimized for throughput and spectral efficiency, not navigation. Several characteristics constrain raw positioning performance:
Finite pilot density limits effective ranging bandwidth
High peak-to-average power ratio (PAPR) stresses nonlinear receivers
4.4 Coverage Variability and Regulatory Constraints
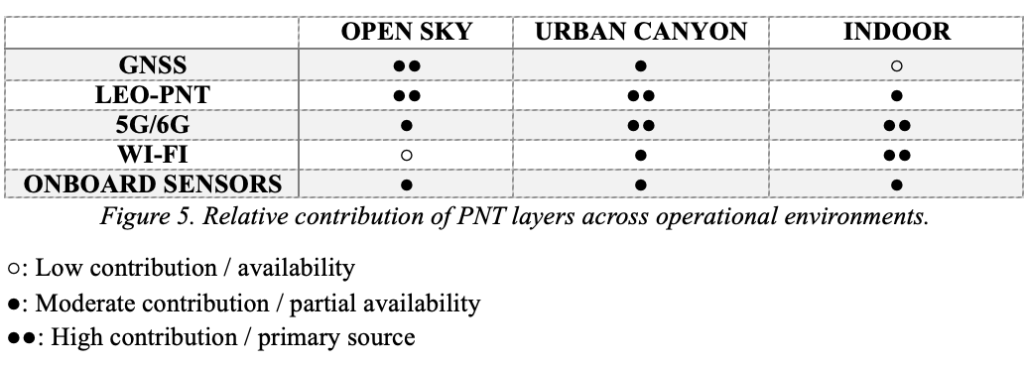
Terrestrial network density varies sharply by geography. Urban cores, industrial sites, and indoor campuses enjoy strong 5G/6G and Wi-Fi coverage, whereas rural, maritime, and mountainous regions may see limited improvements without LEO-PNT augmentation. Spectrum policy, privacy rules, and operator-controlled access to timing and positioning features further constrain how widely these capabilities can be exposed. Figure 5 summarizes the relative contribution of each PNT layer—GNSS, LEO-PNT, terrestrial networks, and onboard sensors—across open-sky, urban, and indoor environments.
Figure 5. Relative contribution of PNT layers across operational environments.
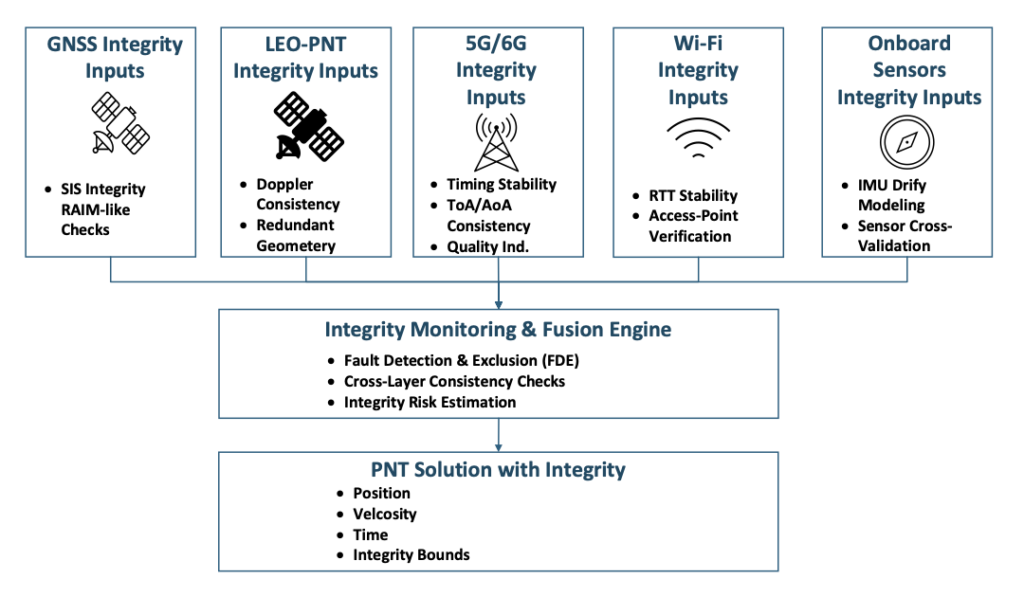
4.5 Security and integrity
As communication signals begin supporting navigation functions, they must meet higher standards for robustness, integrity, and security. PNT observables are vulnerable to spoofing, replay, meaconing and cyber-attacks on timing sources [10]. GNSS experience demonstrates the value of:
Cross-layer consistency checks
Cryptographic authentication
Fault detection and exclusion (FDE)
Monitoring for anomalies in Doppler, timing, or angle domains
Redundancy across multiple constellations and layers.
These functions are visualized in Figure 6, which illustrates how a multi-layer PNT system performs integrity monitoring across heterogeneous measurements.
5. A Multi-Layer Architecture for Future PNT
The earlier sections described why GNSS alone cannot meet emerging PNT requirements and how communications and LEO signals provide new sources of observability. Building on those foundations, Figure 1 introduces a multi-layer architecture in which GNSS, LEO-PNT, terrestrial networks, and onboard sensors cooperate to deliver resilient positioning and timing. This section outlines the role of each layer and how they integrate into a unified system.
5.1 GNSS as the Foundational Global Layer
GNSS will continue to provide the global reference frame, absolute positioning, and precise timing that anchor the entire architecture. Its worldwide availability, mature error modeling, and extensive user base make it the natural reference for other layers to align with whenever GNSS is available and reliable. In this sense, GNSS remains the “truth model” for time and coordinates, even as additional layers enhance resilience.
5.2 LEO-PNT as the High-Power, High-Dynamics Space Layer
LEO satellites provide diversity in orbit, signal power, geometry, and dynamics. Their lower altitude results in significantly stronger signals and rapid Doppler variations that improve motion observability. These characteristics reinforce GNSS performance in interference, urban canyon, and high-dynamics environments. As shown in Figure 3, LEO adds Doppler-based range-rate observables that are particularly valuable for maintaining continuity when GNSS quality fluctuates.
5.3 Terrestrial Networks as the Urban and Indoor Layer
5G, Wi-Fi 7, and future 6G networks form the densest PNT-capable infrastructure ever deployed. Their wideband signals, massive MIMO arrays, and strong received power position them as the dominant layer for indoor and urban navigation. Where GNSS geometry collapses, terrestrial networks provide ToA, AoA, AoD, RTT, and coverage exactly where users most often need it. Figure 5 highlights how their contribution becomes primary indoors and highly complementary in urban canyons.
5.4 Onboard Sensors and Local References
IMUs, odometry, barometers, cameras, radar, and lidar provide short-term stability and immediate awareness of the immediate environment, independent of external RF conditions. These sensors bridge outages and reduce reliance on any single external signal source. Their role within architecture mirrors their role in autonomy today: providing the continuity needed when GNSS, LEO, or terrestrial signals fluctuate. Together with RF observables, they form a robust solution space consistent with the measurement diversity shown in Figure 3.
5.5 Fusion, Standards, and System Engineering
Realizing a multi-layer PNT system is fundamentally a system-engineering effort. Success depends on:
Common timing and reference frameworks across GNSS, LEO, and terrestrial layers
Standardized quality indicators and integrity metrics
Interfaces that expose PNT-relevant observables from communication networks while respecting privacy and operational constraints
Cross-layer consistency checks that ensure no single measurement dominates unchecked
Standards bodies, including 3GPP, IEEE and aviation authorities, are beginning to address these needs, but operationalizing multi-layer PNT at scale will require continued collaboration across industries. Figure 6 illustrates how integrity information from each layer contributes to fault detection, cross-checking, and integrity-bound estimation within the fusion engine.
Figure 6. Integrity monitoring in multi-layer PNT architecture.
6. Conclusion
The era of single-layer PNT is coming to an end. As reliance on precise positioning and timing accelerates across aviation, ground autonomy, critical infrastructure, and networked systems, GNSS alone cannot shoulder the growing resilience burden. Fortunately, a rich set of complementary technologies already surrounds us. Dense terrestrial networks, emerging LEO constellations, and increasingly capable onboard sensors provide observables that naturally augment GNSS and extend PNT into environments where satellite signals struggle.
The opportunity now is to treat communications and PNT not as separate domains but as elements of a unified system. A multi-layer architecture — such as the one outlined in this article — offers stronger availability, improved measurement diversity, and inherent resilience against interference, outages, and environmental constraints. The key challenge ahead lies not in inventing new signals, but in system engineering: establishing shared timing frameworks, standardizing measurement interfaces, ensuring integrity across heterogeneous sources, and building trust in signals not originally designed for navigation.
Most of the technical ingredients are already in place. The next decade will determine how effectively industry, government, research institutions, and standards bodies can integrate them into certifiable, interoperable, and widely deployable solutions. If successful, multi-layer PNT will become a foundational capability — providing trustworthy positioning and timing wherever future autonomous systems, vehicles, and critical infrastructure require it.
As the news subsides on the U.S. operation in Venezuela to capture Nicolás Maduro and his wife, attention is now turning to the legal aspects of the prosecution. Nevertheless, this military undertaking was apparently extremely complex and involved very discreet initial persistent surveillance of not only Maduro’s location but also of a large number of military installations and facilities.
Venezuela has acquired an extensive arsenal of sophisticated Russian air defense capabilities beginning in 2011 and which were apparently recently upgraded in 2024. Heavy damage during the U.S. operation at La Carlota Air Base in Caracas, Fort Tiuna Military Complex, La Guaira Port and El Higuerote Airport appears to have overcome not only surface-to-air anti-aircraft missile systems but also Su-30 Sukhoi Flanker fighter aircraft armed with air-to-air missiles.
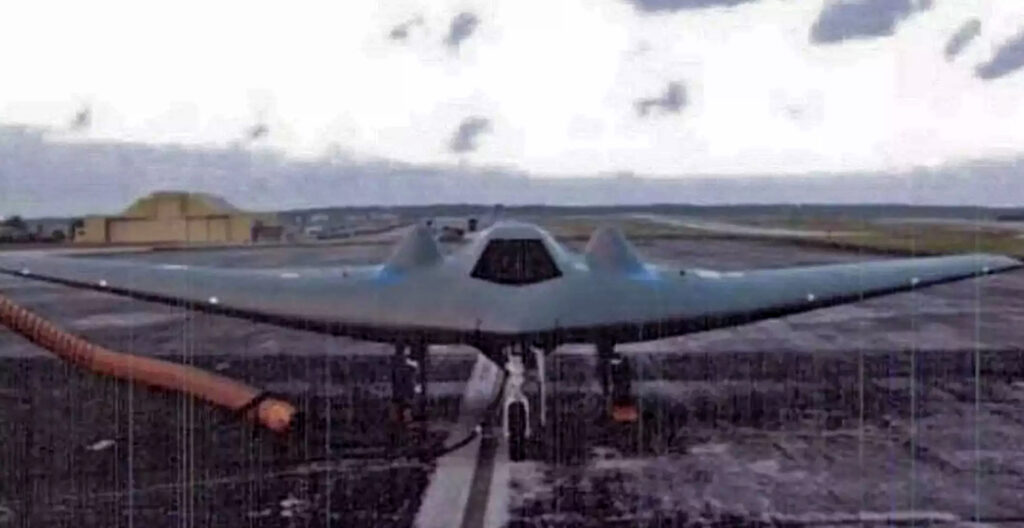
And how was this accomplished? Well, likely with the help of legendary Lockheed RQ-170 Sentinel Stealth Drones. Nothing in the classified operation has been positively confirmed, but it is known that one or two of these surveillance drones were videoed returning to Naval Station Roosevelt Roads in Puerto Rico in the early morning of Jan. 3 following the U.S. attack. And piecing together earlier photos of U.S. Latin American command with an RQ-170 operations operative, pundits now believe confirm RQ-170 involvement.
The 30th and 44th Reconnaissance Squadrons at Wing at Creech Air Force Base in Nevada are the only units the Air Force has confirmed to be operating RQ-170s Wraith low-observable stealth drones.
It’s therefore quite possible that when President Trump said, “I was able to watch it in real time, and I watched every aspect of it,” that the video link may have been supplied by one or more of the RQ-170 Wraith drones circling over the action on the ground.
Another aspect of the Venezuelan operation comes from people on the ground in Caracas who reported a number of instances of “flying bombs” which fell on targets during the U.S. operation. Video clips and numerous personal accounts apparently supported the reports that prop-powered attack drones were being crashed into ground targets, followed by big explosions.
And previously on Dec. 16, the U.S. had a “first” for the U.S. Navy to have launched a one-way attack drone from the deck of the USS Santa Barbara in the Arabian Gulf. These earlier reports indicated that these attack drones could be launched by catapult, using rocket assist and from mobile ground vehicles.
Therefore, it is not much of a leap to say it’s very likely that other marine and ground launch facilities in and around Venezuela dispatched many one-way, likely semi-autonomous attack-drones to take out targets prior to Delta Force being helicoptered in to capture Madura.
Meanwhile back in the U.S., well away from military action, the Federal Communications Commission has effectively banned the sale of any new UAS or parts for UAS being imported into the U.S. The ruling was developed after the White House initiated a review aimed at protecting American security which decided “that UAS and UAS critical component parts that are produced in foreign countries pose unacceptable risks to the national security of the United States and to the safety and security of U.S. persons.”
To somewhat clarify the situation, the FCC just added exemptions for Pentagon-approved “Blue List” drone models and parts thereof from EagleNXT, Parrot, Teledyne FLIR, Neros Technologies, Wingtra, Auterion, ModalAI, Zepher Flight Labs and AeroVironment — imports from these suppliers will be allowed through the end of 2026.
So with new models of foreign drones being prevented from entering the U.S., the U.S. drone industry has been granted, at least for the moment, an opportunity to develop leading UAS models which will eventually outpace existing foreign drones operating in the U.S. It’s predicted that the FIFA soccer World Cup this summer will need a lot of drone coverage for security purposes — possibly a new U.S. drone home market.
The Bell-Boeing V-22 Osprey is a complex military tilt-rotor aircraft which overcame many hurdles in its development and initial operations phase, even having some incidents during its mature field operations.
Nevertheless, the Chinese appear to have adopted a similar design approach for the Lanying R-6000 manned/unmanned tilt-rotor 6-12 passenger eVTOL and a 2-ton-cargo transport version. The promotional video for the Chinese United Aircraft R-6000 seems to interchange shots of the V-22 in hover mode with recent R-6000 prototype system in hover flight. However, Bell-Boeing web statements disclaim any linkage with the Chinese company or its R-6000 development.
If the name “United Aircraft” seems familiar, it’s because there was such a company in the U.S. in the 1930s, changing its name to United Technologies (Pratt & Whitney) in 1975, now RTX Corp.
United Aircraft in China has apparently been around since 2012 and has produced a number of vertical lift aircraft, including the TD220 twin-coaxial helicopter (without tail boom). As with most large industrial companies in China, this one also seems heavily engaged with the Chinese military and is now making inroads into the civilian marketplace with a number of UAVs for various applications, leading up to the projected 550 mph Lanying R-6000, which has been depicted in low-level flight mode.
Promotional image of eVTOL Lanying R-6000. (Photo: United Aircraft)
So, a mixed bag of unmanned aircraft reports this month, ranging from drones likely used in the recent U.S. action in Venezuela, FCC rulemaking to restrict imports of foreign UAVs into the U.S., and all the way to a new potential Chinese tilt-rotor eVTOL entrant.
CHC Navigation announced at CES 2026 that MOVA has integrated CHCNAV PointX integrated satellite ground service and the StellaX high-precision positioning chip into its NAVAX 5000 AWD intelligent robotic lawn mower, unveiled at the show in Las Vegas last week.
The integrated positioning solution is designed to support centimeter-level accuracy for wire-free mowing, without requiring users to install a local RTK base station or subscribe to cellular data plans.
Wire-free robotic mowers are accelerating adoption of virtual boundaries and automated coverage. Many systems rely on local RTK reference stations, network RTK, or cloud connectivity, which can increase installation complexity and introduce ongoing service costs. CHCNAV and MOVA developed a positioning architecture designed to address these limitations through satellite delivered corrections combined with onboard sensor fusion.
Wire-free mowing without local base stations
NAVAX 5000 AWD uses CHCNAV PointX integrated satellite ground service to deliver GNSS enhancement signals via satellite. With the StellaX high-precision positioning chip, the mower can achieve centimeter-level positioning across supported regions without requiring users to deploy and maintain an RTK base station at home. This can reduce setup time, remove routine base station maintenance, and avoid recurring cellular data fees for positioning corrections.
Residential yards often include trees, walls, fences and buildings that degrade satellite visibility and create multipath effects. NAVAX 5000 AWD combines satellite-based RTK positioning with binocular vision and lidar to strengthen navigation performance in these environments.
With PointX and StellaX, the system is designed to deliver stable positioning and consistent path tracking in obstructed areas where traditional GPS RTK-only approaches can be difficult to sustain.
PointX-integrated satellite ground services support rapid RTK initialization to reduce waiting time at startup. This enables power on and go operation for typical mowing sessions and supports repeated runs with minimal user intervention.
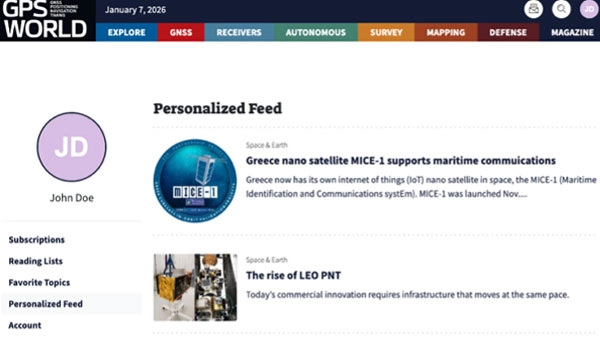
GPS World has officially launched a redesigned website that introduces a range of new features aimed at improving the reader experience while also expanding advertising capabilities.
Several new features have been implemented to increase engagement.
Registered users can now create reading lists, allowing them to save articles and organize content into custom lists. They also can select the topics they are most interested in to generate a personalized content feed within their dashboard, ensuring they see the content they care about most. These topic selections also help drive additional content recommendations on article pages, further enhancing reader engagement. In addition, registered users can manage their newsletter and magazine subscriptions directly from their user dashboard.
One major new feature available to all users, regardless of registration status, is the ability to listen to articles. GPS World editors can generate audio using an AI-based text-to-speech platform, which places an audio widget directly on article pages so users can listen to content in full. The homepage also includes a section highlighting the most recent articles with audio, complete with a customizable message from the editors or advertisers.
The new features and improvements introduced with the redesign can be grouped into reader-focused and advertiser-focused enhancements.
Reader-focused features include:
Listenable content
Reading lists
Personalized content feeds
Subscription management
Advertiser-focused features include:
New ad zones throughout the site
Sellable audio messages for listenable content
Ideal functionality for surveys, gated whitepapers, and other custom content
Registration on gpsworld.com is completely free and takes less than a minute. Current GPS World subscribers will have their customer information automatically connected to their GPS World website account.
The Trimble module provides Volatus’ clients with a turnkey solution for highly-accurate aerial data acquisition and fully-remote drone operations in real-world missions, including beyond visual line of sight (BVLOS).
The Trimble PX-1 RTX uses Trimble’s CenterPoint RTX corrections along with compact, high-performance GNSS-inertial hardware to deliver real-time, centimeter-level positioning and highly precise inertial-derived true heading measurements. This technology reduces operational risks associated with poor sensor performance or magnetic interference by providing enhanced positioning redundancy.
Volatus must meet strict guidelines addressing airspace entry and exit, altitude and speed, and communication and remote identification when taking off from and landing at the Edmonton International Airport in Alberta, Canada. The flight corridor approved by Transport Canada and Nav Canada requires them to land and takeoff with precision, while staying at 50-feet altitude when crossing airplane arrival routes.
Trimble PX-1 RTX’s precise positioning capabilities address crucial accuracy challenges for takeoff and landing, while supporting an exact flight altitude and positioning within the flight corridor. This capability enaables Volatus to remain compliant with the controlled airspace authorization from Nav Canada, a non-profit that operates the country’s civil air navigation system.
The Trimble PX-1 RTX solution is available through Trimble sales channels.