As the world of GNSS moves forward and begins to absorb the new signals which are coming on line, it might be helpful to consider where we are going with all this. Maybe its time to ask ourselves to hold on a second — where is this all leading and what do we actually need? Let’s take a quick look at where we’ve been with GPS and GLONASS and what’s in store for these systems and what the impact might be for us users. Then if we consider the changes coming with Galileo, COMPASS, QZSS and the augmentation and regional system around the world, how can we as consumers cope with what’s coming and what impact will these things have on us? And what direction should manufacturers take to accommodate and lead consumers?
When GPS first became operational, at least the surveyors breathed a sigh of relief and recognized that their work had become easier. No need to get out of bed in the middle of the night to catch a better configuration of satellites, which would only be around for two or three hours in the early hours of the morning. Now we had 24/7 coverage; while DOPs would ebb and flow a little, we still had pretty good position measurements just about any time.
Then the Russians also grew GLONASS into an operational system and we had the luxury of two constellations to work with; that is, if we could find dual-function receivers with high enough precision. Sure enough, a couple of manufacturers began to sell GPS/GLONASS receivers and we had virtually doubled the number of visible satellites in the sky, which allowed us to work when we wanted. And RTK using two constellations seemed like precision heaven!
Unfortunately GLONASS decayed, and designers and researchers worked a lot harder to extract the maximum they could get out of GPS alone. But now GLONASS is back, and even though we have some individual satellite idiosyncrasies to manage, and frequency diversity complexity means we have quite an overhead in RF bandwidth and added interference rejection — well, getting twice the number of satellites is worth it. And most manufacturers have come up with later generations of dual-function receivers that have very good, if not excellent, performance.

NovAtel OEMV-1G GPS/GLONASS receiver.

Ashtech MB 500GPS/GLONASS receiver.
Septentrio AsterRx-m GPS/GLONASS receiver.
So what’s next? Should manufacturers wait for Galileo to get a usable constellation before they start trying to persuade customers that they need a new receiver that can get even better performance than the dual-function GPS/GLONASS receivers a number of users just bought? Or are these receivers just good enough? What about COMPASS?
And those customers in Asia who can even see one or more COMPASS GEOs and/or “wobbly-GEO” satellites, and who might have the prospect of receiving added QZSS signals, or even IRNSS regional signal spill-over into their geographic areas — what should manufacturers provide to those customers? And what happens when COMPASS becomes truly global?
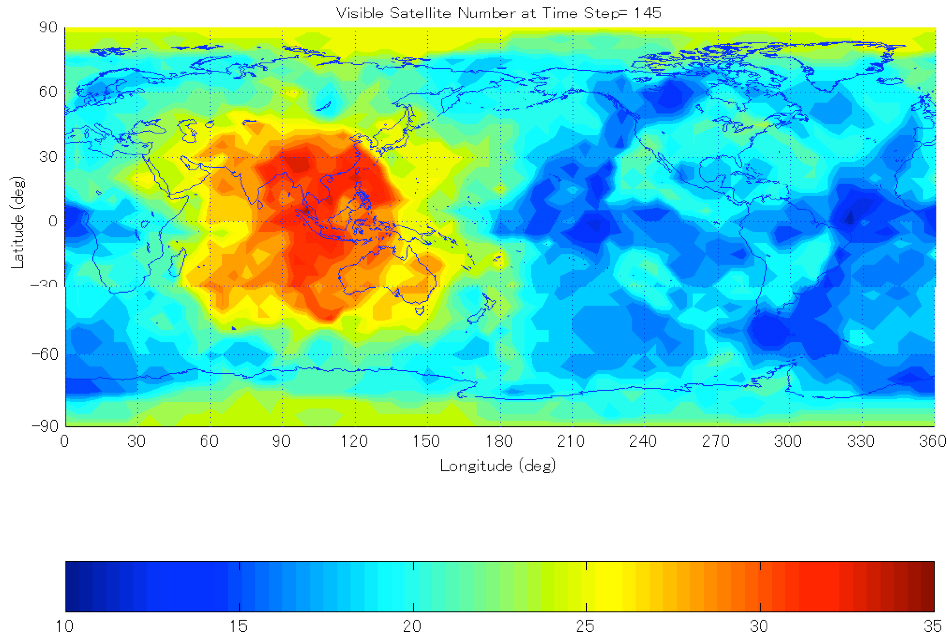
Asian multi-constellation illustration, courtesy of Hiroaki Tateshita – JAXA (Click to enlarge).
Well, it all depends on what the customer wants, right? That might apply for iPhones and their clones, for high fashion clothes, or for 60-inch plasma TVs, or the huge choice in high-performance cars — but GNSS seems a little different. “Accuracy is addictive,” someone said — well, higher performance GNSS receivers do create their own demand in the marketplace, and if you have something that is better, people seem to be prepared to pay for it.
And there was a phase, which we might actually still be in, where all the manufacturers claimed that they had Galileo, and receivers were already upgradable so you could get what’s coming when you bought your next-generation receivers. Buy the latest receivers and be ready for when there are enough satellites to also get Galileo. Not sure that worked as a sales strategy, because what’s hot now are GPS/GLONASS receivers, which work better than anything else we’ve had before.
Could be Galileo didn’t come on line when we expected it, so manufacturers backed off the “buy now, upgrade later” strategy. But Galileo is now “around,” and in the coming couple of years, we might just have enough SVs to make the investment worth making in a receiver with Galileo capability. But do you buy Galileo now, or will COMPASS get there first? And in Asia, wouldn’t it be more useful to use a few COMPASS extra SVs now?
This is exactly the same dilemma that the GNSS developers, designers and manufacturers now face. Admittedly the Galileo Open Service ICD is available and contains sufficient detail, which is more than you can say for the somewhat skimpy COMPASS ICD. And developers are now building Digital Signal Processing (DSP) ASICs which have “generic” reconfigurable channels — but RF front-end hardware and signal processing software are commodities that require serious R&D effort. And these generic DSP channels and their associated software decoding algorithms may not be generic enough for all the things that you may discover in the more esoteric Binary Offset Carrier BOC (x,y) or Multiplexed BOC (x,y) modulation schemes which have still to come on line.
And what schemes might be hidden deep inside the COMPASS signal structure when we get to see more details — what modulation might we find on other frequency signals?
You can download the Japanese QZSS ICD from the JAXA website, but as the disclaimer says, the data transmitted from the QZS-1 satellite ’is provided without any warranty, including but not limited to accuracy, usefulness, Positioning Signal continuity, and fitness for a particular purpose of use of the Signals.’ I seem to remember similar disclaimers in the released Galileo ICD. The phrase “including but not limited to” is great legal terminology that basically says you are on your own if you should be so bold as to make a receiver using the information provided in the ICD — basically anything could happen to you, including maybe even being zapped by Martian death rays… The legal guys can caveat just about anything! But I couldn’t find any disclaimers in the released draft COMPASS ICD — it’s just missing essential stuff like the navigation messages.
So, as a manufacturer, you need to balance the real desire you have to sell so many receivers that you control the entire GNSS marketplace, with the knowledge that if you use compatibility with the new constellations as your sales gimmick, there may be some risks. As consumers, we need to be aware that although these new constellations will be great to have to improve GNSS performance, the data to which manufacturers currently have access to make receivers that include Galileo, COMPASS, QZSS or even other developing augmentation or regional systems, this data is still somewhat preliminary — which means it could change — or assumptions have to be made to fill the gaps. So manufacturers have to be very smart, and use flexible hardware design approaches which allow them to update receivers through future software changes. This might not always be the most optimum approach for signal processing, which may be more efficient when optimized and implemented in silicon; tuning on mature/stable signals might eliminate or simplify components and high-powered processors might run a little less intensely with software work-arounds.
So, as usual it’s a compromise — if you want to have the early implementation to gain a competitive advantage for your application, you may get ahead and win market share, but just be aware that more efficient, possibly less costly offerings may be available later, and then you’ll have to buy that too to keep up.
The analogy could be — go ahead and buy that hybrid gas/electric car now because you want to save the environment. But be aware that there is a huge amount of research ongoing into how to make lighter, more efficient and more compact vehicle batteries, and there will be even more fuel-efficient vehicles in the future — its just how soon will they be available? And should you wait to get more benefits? Most people want better stuff now — so GNSS manufactures will offer more GNSS for your buck, even though right now the advantages are somewhat limited. And when we’ve waited and we know if Galileo or COMPASS is the way to go, its not outside the realms of possibility that we may have to ultimately replace what we buy today. That’s the price of progress.
In the meantime, GPS/GLONASS receivers are very good and getting better as manufacturers refine and improve things. So as far as multi-constellation receivers go — we already have ‘em.
Tony Murfin
GNSS Aerospace
 “We conclude that LightSquared’s proposed mobile broadband network will impact GPS services and that there is no practical way to mitigate the potential interference at this time.” These words from Lawrence Strickling (right), U.S. assistant secretary for communications and information and head of the National Telecommunications and Information Administration (NTIA), appear to signal the end of LightSquared’s run.
“We conclude that LightSquared’s proposed mobile broadband network will impact GPS services and that there is no practical way to mitigate the potential interference at this time.” These words from Lawrence Strickling (right), U.S. assistant secretary for communications and information and head of the National Telecommunications and Information Administration (NTIA), appear to signal the end of LightSquared’s run.





