Most people appear to be silently waiting for artificial intelligence (AI) to come up with a meaningful application beyond replicating jobs — one that actually helps people accomplish new tasks.
Daily news reports show one of the so-called “Magnificent Seven” technology companies pouring another billion dollars or more into AI data centers or basic development. Well now, the Defense Advanced Research Projects Agency (DARPA) has found a smaller AI company to develop a novel application for UAVs.

PhysicsAI has contributed AI “agents” to a highly modified F-16 for machine perception, intelligent behavior, control and adaptive learning to create an autonomous UAV, according to available information. The VISTA X-62A participated in a manned-unmanned dogfighting demonstration in September 2023, though the outcome has not been disclosed. Other platform enhancements include intelligent sensors through computer vision, EO/IR/RADAR sensor fusion and virtual reality simulations.
DARPA has engaged PhysicsAI to enhance UAVs so they can extend range and mission length by “soaring” — the technique birds use to find thermals in the atmosphere to climb to higher altitudes. AI agents will be designed, trained and tested to evaluate dynamic wind conditions, optimize flight profiles and perform soaring maneuvers.
DARPA intends to develop AI agents that will extend endurance by employing this bird-like soaring capability to reduce UAV onboard power usage and extend range and mission duration.
There is nothing new to report on the apparent drone crash Sept. 25, 2025, near the secretive base in Nevada, known as Area 51. The aircraft was attached to the 432nd Wing/432nd Air Expeditionary Wing at Creech Air Force Base in Nevada, about 57 miles southwest of the crash site. The 432nd operates MQ-9 Reaper drones, but the 33rd and 44th Reconnaissance Squadrons are also known to operate out of Creech and may operate RQ-170 Sentinel stealth drones.
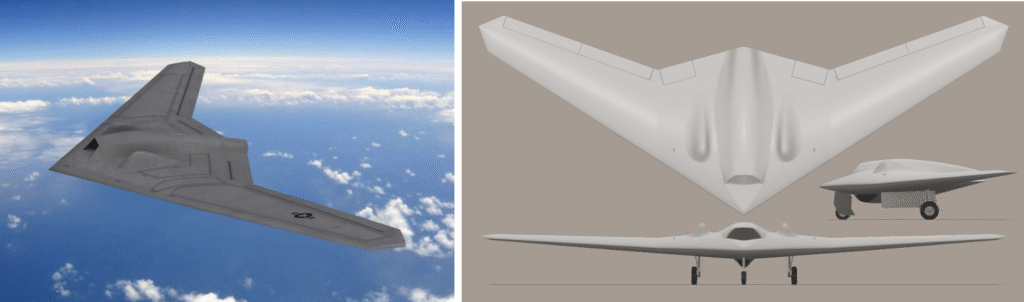
Famous (or infamous) for a 2023 reconnaissance operations in Iran, where one aircraft was apparently captured by the Iranians, the RQ-170 has been around since 2021.
The mystery surrounding the crash near Area-51 has grown somewhat since an inert training bomb and an aircraft panel were discovered at the crash site, but these items were not part of the damaged/destroyed crashed aircraft. In addition, the Air Force Office of Special Investigations (OSI) and the FBI have now been brought in to investigate. Enthusiasts who managed to get to the crash site recently found it cleaned completely, with no sign of spilt fuel or debris.
Troops in the field need information most — where the enemy is, their capabilities and what they’re doing.
One option: Launch a drone with video, infrared and radar, then use whichever works best depending on lighting, weather and whether the enemy jams signals. Better yet, call in a high-altitude surveillance drone like a GA-ASI Reaper that the enemy can’t see or hear. But that takes time, and one might not be available.
A new concept builds on an old precept — climb a tree and look at the opposition. But trees can be hard to find, difficult to climb and not high enough.
The answer to jamming and observational altitude: a tethered drone that a squad can carry. If the squad has a truck or Humvee, it can launch a tethered drone with no time limits because power comes up the tether with driving instructions while visual data goes back down. If necessary, move the ground vehicle closer and the drone moves with it.
Tethered drones serve any operation needing overview — rescue teams in disasters needing to see farther or a temporary communications hub, security operations searching for someone or something, monitoring or observing for infiltrators, initial surveys of difficult-to-access locations or military operations. Many other applications exist.
Most commercial and first-responder operations favor commercial or heavy-lift multirotor drones. Companies using multirotor drones include Hoverfly, Zenith, Fotokite, USaS, Advexure, Elistair, Kratos and Volarious.


If tethering drones to get really high, maybe use an aerostat that TCOM claims can operate from ground level to the stratosphere — pretty long tether needed! But applications also include anti-drone systems used to track and disrupt drone intruders.
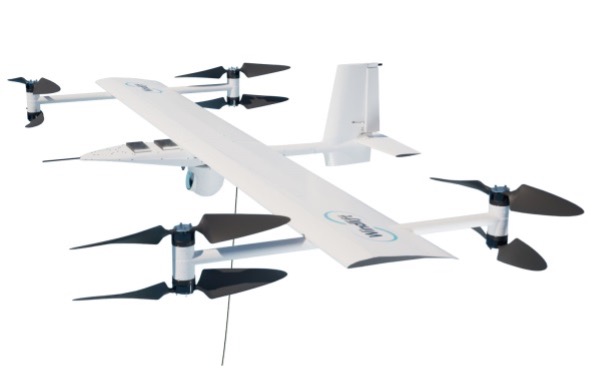
Then a more recent entrant is Windlift who uses a fixed wing multi-prop drone on the end of a very long tether to gain altitude and to operate in the sort of wind conditions that might be found at times in many locations world-wide, on land or at sea — very windy to gale force winds, actually up to 55mph. Now this is pretty tough for any tether system, but Windlift has a variable cross section tether which mitigates wind-resistance. And their special application is to fly in a figure of eight pattern at high altitude — to generate electricity.

This month brings a mixed bag of drone news, ranging from AI-driven “soaring” drones to an Area 51 drone crash mystery and an overview of tethered drones and their applications, including power generation. Who could have forecast these drone applications? Well, maybe the crashing part.