ILMF is a technical conference and exhibition showcasing the latest airborne, terrestrial and underwater lidar, as well as emerging remote-sensing and data collection tools and technologies.
According to organizers, the show will allow attendees and exhibitors to connect with hundreds of professionals seeking lidar and other 3D geospatial data collection technologies to support asset management, civil infrastructure, coastal zone mapping, emergency services and disaster response, land and natural resource management, urban modeling and more. It will also cover the latest advances in lidar technology.
Keynote speakers at the event will include the U.S. Geological Survey’s Jeff Sloan, who will discuss if data from UAS sensors will overtake manned and satellite sources; Colorado State University’s Michael Lefsky, who will discuss reconstructing historic land use and forest structure using aerial photos and structure from motion analysis; and the NASA Jet Propulsion Laboratory’s Eric Larour, who will address a new tool from NASA for coastal planners.
ILMF will be co-located with the ASPRS Annual Conference. The combined event will feature a single exhibit hall. The two events will still have their own technical programs, and attendees will have the option to purchase a conference pass for programs of their choice or a universal pass for all offered programs.
Bentley Systems has received a 2018 Microsoft Partner of the Year award for helping Malaysia’s Mass Rapid Transit Corporation (MRTC) in going digital for a railway project. According to Microsoft, through this project, Bentley Systems demonstrated excellence in innovation and implementation of user solutions based on Microsoft technology.
These awards were distributed in 39 categories, and Bentley Systems received the award in the CityNext Partner of the Year category.
With more than 1.7 million people residing in just 94 square miles, Kuala Lumpur, Malaysia has one of the highest population densities globally. As a result, it is estimated that residents living in the Greater Klang Valley region collectively spend 280 million hours per year stuck in traffic, said Bentley Systems. The Sungai Buloh-Serdang-Putrajaya (SSP) line is the second line of MRTC’s Klang Valley Mass Rapid Transit railway project, which will create better mobility for residents and make it possible to ease traffic by an estimated 160,000 cars daily, Bentley Systems said.
According to Bentley Systems, the SSP line is Malaysia’s largest infrastructure projects. It includes 11 interchange stations and created an estimated 130,000 job opportunities.
“We are honored to have received this prestigious award which recognizes Bentley as a provider of cloud-based software solutions powered by Azure, for the advancement of infrastructure projects throughout the world, and specifically for Mass Rapid Transit Corporation’s outstanding Sungai Buloh-Serdang-Putrajaya line in Malaysia,” said Greg Bentley, CEO of Bentley Systems. “MRTC is going digital, harnessing Bentley and Microsoft technology to deliver one of the most ambitious infrastructure projects ever undertaken in Asia.”
Founded in 1984, Bentley Systems provides engineers, architects, geospatial professionals, constructors, and owner-operators with comprehensive software solutions for advancing infrastructure.
MicroPilot received a $2 million contribution toward its $5 million project to develop systems and processes that will allow certification to DO-178C airworthiness standards. In other words, MicroPilot aims to demonstrate a level of software reliability that will allow regulators to permit UAVs to operate over cities and towns.
MicroPilot is leading the Hi-Rise research consortium, a group of companies from different nations that is working to help achieve this goal.
“This is such a large project because the software and certification process for DO-178C compliance is complex and difficult,” said Howard Loewen, president of MicroPilot. “MicroPilot and the Hi-Rise consortium are always looking for new and innovative ways to assure regulators that the software is reliable.”
According to MicroPilot, it will use this contribution to further its goals to improve the regulatory and software certification framework for UAVs.
From left: Ruy Pinto, chief information officer, deputy chief technology officer of SES; André Bauerhin, COO, Spaceopal; Nicole Robinson, SVP Global Government at SES Networks; Etienne Schneider, Luxembourg Deputy Prime Minister, Minister of the Economy. (Photo: SES)
SES will provide a series of services for the Galileo European navigation system under a long-term agreement with Spaceopal, a joint venture between Telespazio and DLR GfR mbH. According to SES, the contract is part of the Galileo Service Operator framework agreement between Spaceopal and the European Global Navigation Satellite System Agency.
Under the agreement, SES will provide Spaceopal with services to support the maintenance and operations of the Galileo Global Navigation Satellite System. Further, SES will be responsible for in-orbit measurements for the Galileo satellite constellation and provide VSAT managed services to Telespazio for the Galileo Data Dissemination Network.
“We are delighted to extend our partnership with SES in the framework of the Galileo Service Operator contract with the European Global Navigation Satellite Systems Agency,” said André Bauerhin, COO of Spaceopal. “SES’s previous success with the Galileo project in delivering and managing services for both in-orbit testing and the Galileo Data Dissemination Network has made SES the clear choice for this operational contract.”
SES also looks forward to the partnership.
“We are proud that we can continue to draw on the experience that we have accumulated while working on Galileo over the years, and continue to be part of the team in ensuring the reliability of the GNSS system and accommodating its shifting demands in the next decade,” said Nicole Robinson, SVP Global Government at SES Networks.
Previously, SES has provided infrastructure and services for the Galileo program, as well as ground stations and in-orbit testing during the In-Orbit Validation Phase.
Rebecca Lasica, director of enterprise platforms and partners at Harris Geospatial Solutions, offers a rundown on the company’s PrecisionPass solution at Xponential 2018. According to the company, PrecisionPass enables UAV pilots to quickly determine in the field if a data collection meets the required criteria or if it needs to be collected again.
A U.S. soldier preparing his Blue Force Tracker before departing Camp Victory, Iraq in 2005. (Photo: Petty Officer 1st Class Brien Aho, U.S. Navy)
A free GPS World webinar, sponsored by Orolia and taking place at 1 p.m. EDT on Thursday, June 21, will discuss “Defense PNT in Challenged Environments.”
The webinar will consider the reliance on GPS in modern land-warfare systems, as well as the potential effects of GPS disruption on their operations and ways to protect their ability to continue operating in a GPS-disrupted environment.
John Fischer, vice president of advanced R&D at Orolia; John Sinden, product manager for rugged PNT at Orolia; and Tim Erbes, CTO at Talen-X, will present during the webinar. GPS World Editor-in-Chief Alan Cameron will moderate it.
Fischer, who has worked with global navigation satellite systems, wireless, positioning navigation and timing at Orolia for more than 15 years, will highlight protecting GPS-reliant military systems during his presentation. Fischer will also discuss considerations for protecting land-warfare systems’ ability to continue operating in a GPS-disrupted environment from jamming, spoofing or environmental interference.
According to IAIN, all submitted abstracts will be reviewed by the Science Program Committee.
The abstracts must be submitted online, and authors can submit more than one abstract. The abstracts may be submitted as an oral or poster presentation and must be written in English, IAIN adds. Selected abstracts will be published in the program book.
IAIN World Congress 2018 will be hosted by the Japan Institute of Navigation and will focus on science, technology and practice in regard to resilient navigation.
IAIN is a non-governmental, non-profit organization that works to unite national and multinational institutes and organizations that aim to foster human activities at sea, in the air, in space and on land.
My last column described the National Geodetic Survey’s (NGS) GPS on Bench Marks (BM) 2018 interactive web map, and provided an update and status report on stations observed in support of the 2018 GPS on BMs Program. It mentioned that all new data received by the cut-off date of Aug. 31 will be analyzed by NGS and, if appropriate, the results will be included in the next hybrid geoid model. This is a great opportunity to provide data that will help to improve the hybrid geoid model in your region. This column will provide an update and status report on stations observed in support of the 2018 GPS on BMs program and provide an example of how OPUS-shared results identified a station that may have moved since it was last leveled.
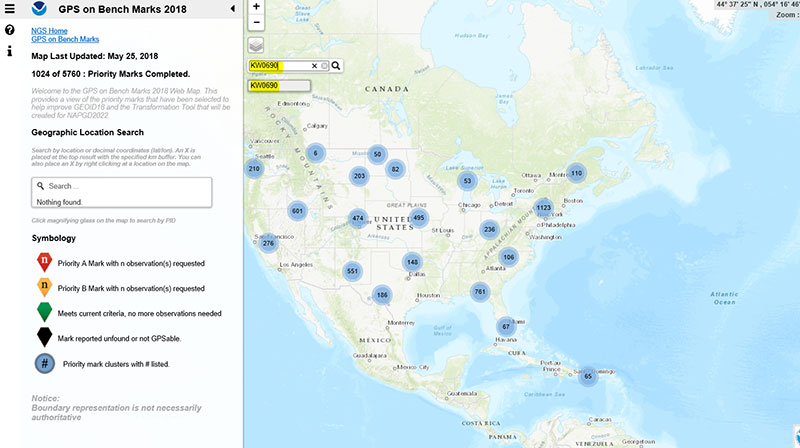
As mentioned in the last column, the GPS on BMs 2018 web page contains a link to a web map where users can determine which bench marks NGS would like users to occupy before the August 31, 2018, deadline. The web map also provides a list of the stations observed to date to ensure users are not wasting their time observing stations that already have enough repeat observations. NGS is updating the map weekly to reduce users occupying stations that already have enough redundant observations. The box titled “2018 Web Map” depicts the map update of May 25, 2018. The web map has a search feature so if the user knew a station’s PID, they could locate the station on the map. The box titled “An Example of Using the Web Map Search Feature” depicts the search feature using PID AW0690 (see highlighted section in the box).
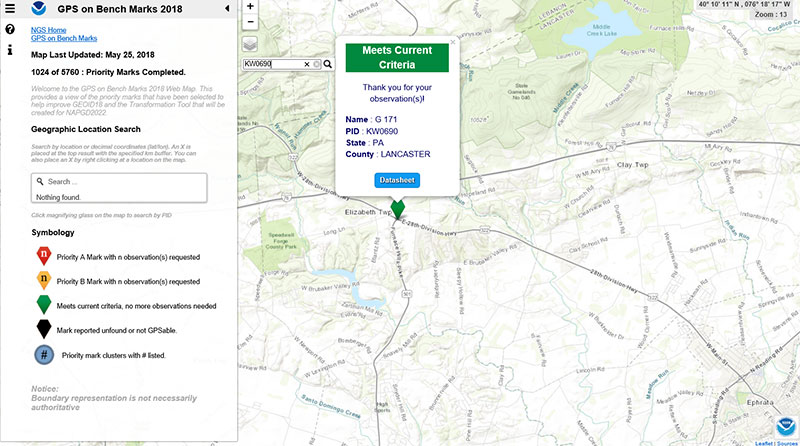
The box titled “Map After Searching for PID KW0690” depicts the map after searching for PID KW0690. As indicated by the symbol, the station meets the current criteria. That is, it has two GNSS-derived ellipsoid heights that agree within NGS’ criteria for use in evaluating and generating the next hybrid geoid model.
Map After Searching for PID KW0690
Click to enlarge.
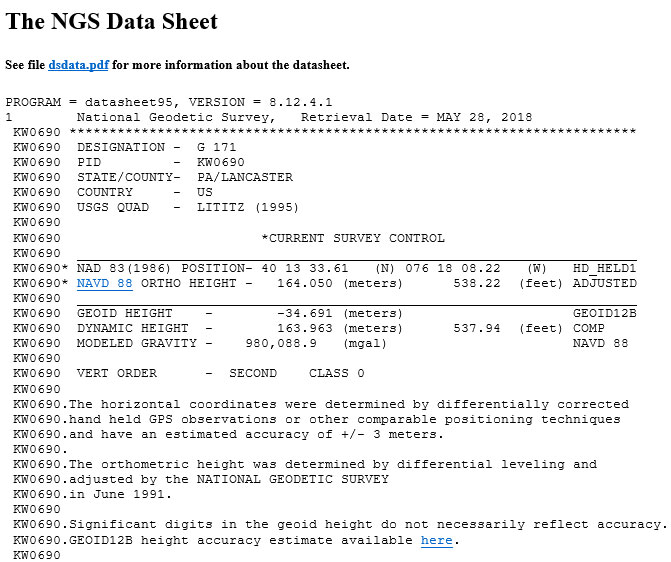
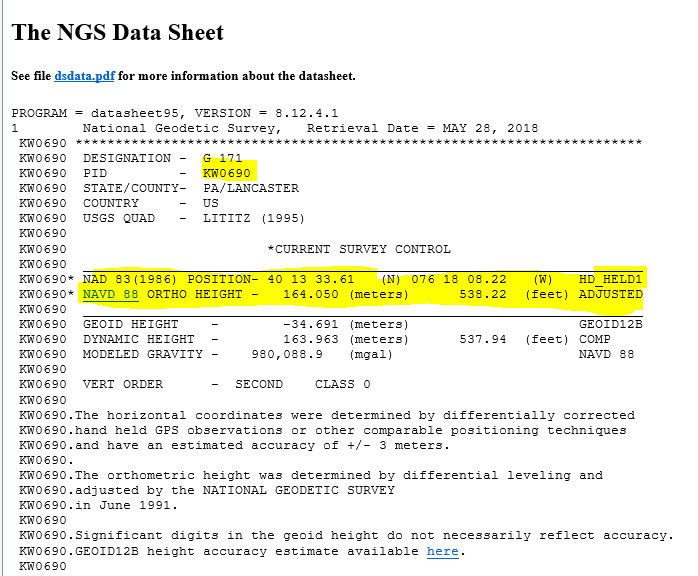
The user can continue to check on the link labeled “Datasheet” to obtain the latest data sheet for the station (see the box titled “NGS Data Sheet for KW0690”).
NGS Data Sheet for KW0690
Click to enlarge.
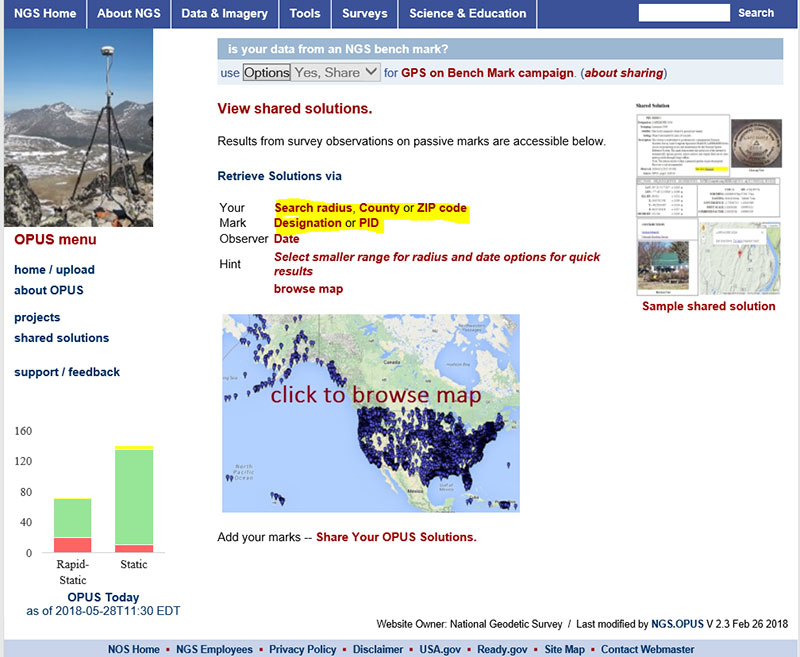
Next, let’s look at the OPUS shared results for the station (KW0690 – G 171). OPUS shared solutions can be found at this website. (see box tilted “OPUS Shared Solutions Web Page”).
OPUS Shared Solutions Web Page
Click to enlarge.
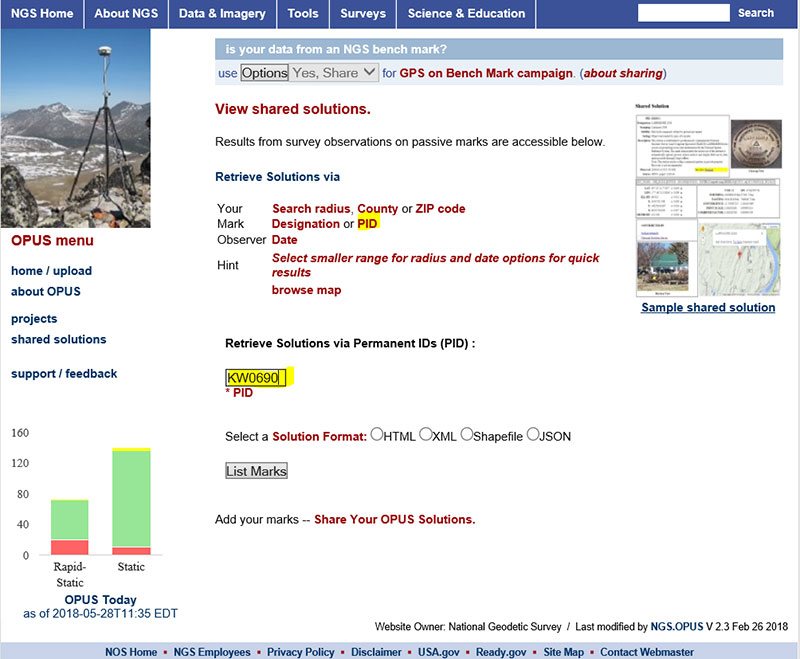
The user can search for a particular OPUS shared solution by checking on the PID option (see highlighted section on the box titled “Web Page After Clicking on PID Option.”
Web Page After Clicking on PID Option
Click to enlarge.
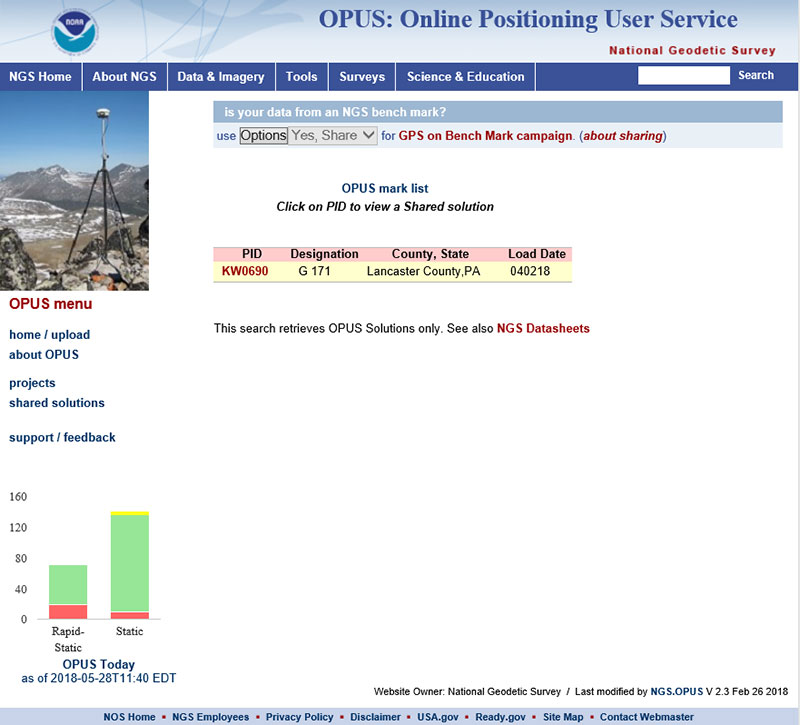
The box titled “An Example of Selecting an OPUS Shared Solution for a PID” depicts the output after clicking on the button labeled “List Marks.”
An Example of Selecting an OPUS Shared Solution for a PID
Click to enlarge.
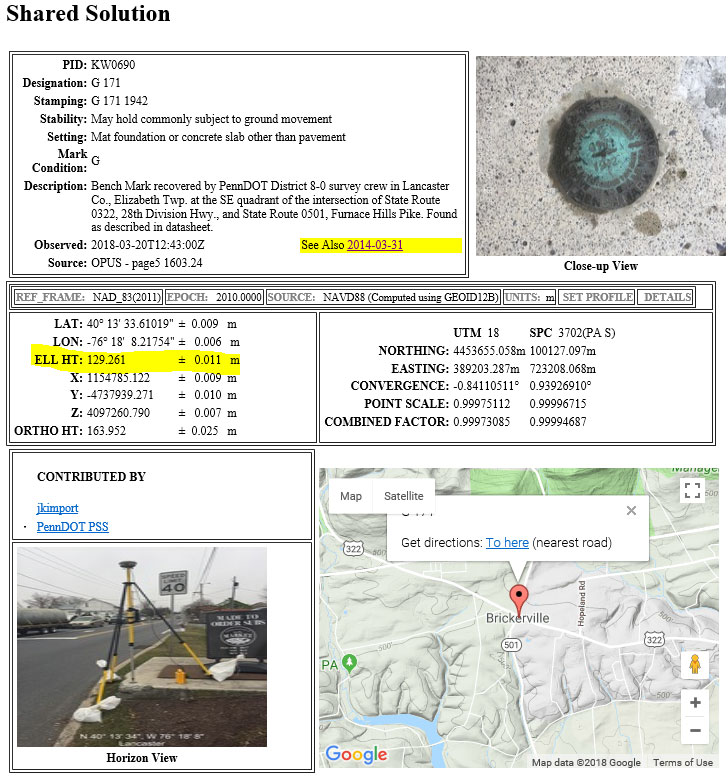
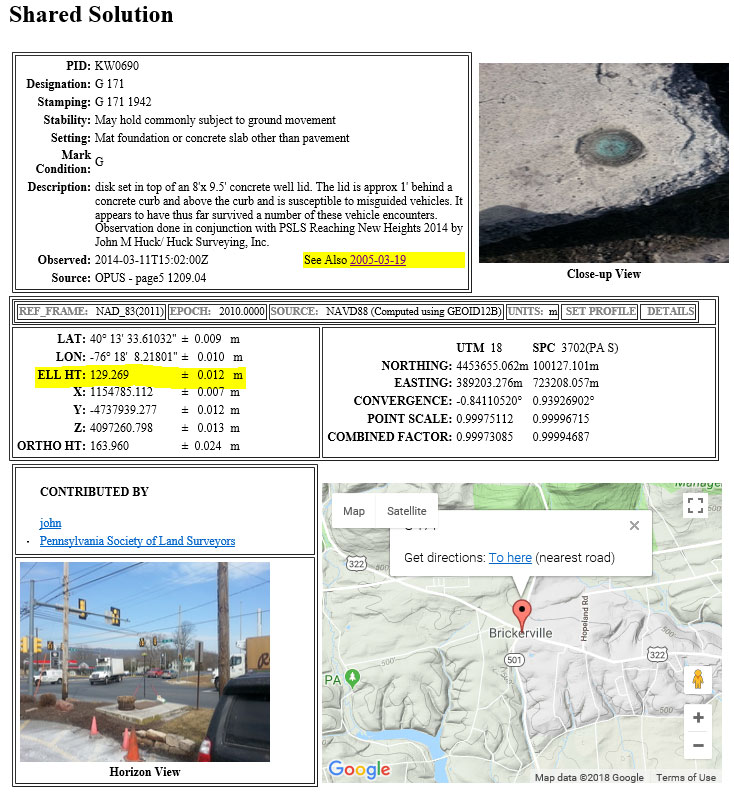
The box titled “The OPUS Shared Solution for KW0690 (2018-03-20)” provides the OPUS Shared solution for station KW0690 performed on March 20, 2018. The output provides the NAD 83 (2011) 2010.0 coordinates with error estimates.
The OPUS Shared Solution for KW0690 (2018-03-20)
Click to enlarge.
When there is more than one observation, the output file provides a link to the other observations. In this case, there was another shared solution on March 31, 2014 (see box titled “The OPUS Shared Solution for KW0690 (2014-03-31).”) The two solutions indicate the ellipsoid heights agree to 8 mm (129.269 m – 129.261 m). This is an indication that the station is a valid candidate to be considered for the development of the hybrid geoid model.
The OPUS Shared Solution for KW0690 (2014-03-31)
Click to enlarge.
The second OPUS Shared solution also indicates that there is a third observation (2005-03-19). Clicking on that link provides the NGS data sheet (see box titled “Excerpt from NGS Data Sheet for KW0690”).
Excerpt from NGS Data Sheet for KW0690
Click to enlarge.
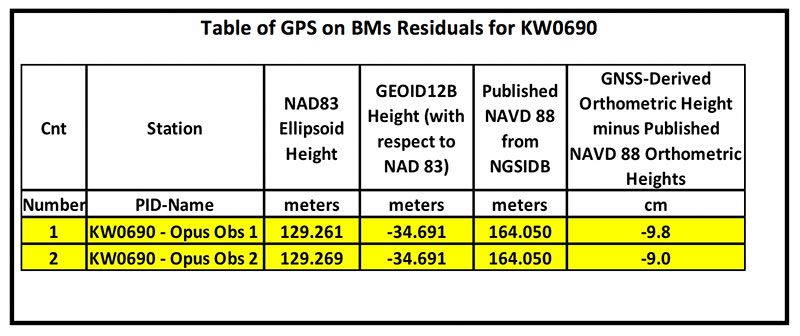
It should be noted that this station doesn’t have a published NAD 83 (2011) coordinate. The OPUS shared solutions provide the NAD 83 (2011) ellipsoid height and the NGS data sheet provides the published NAVD 88 orthometric height. Comparing the GNSS-derived orthometric height using the OPUS shared ellipsoid heights and GEOID12B indicate the station is inconsistent with published NAVD 88 orthometric height. The box titled “Table of GPS on BMs Residuals for KW0690” provides the GPS on BMs residuals based on using the latest hybrid geoid model GEOID12B. It was noted that the two ellipsoid heights agree to within 8 mm but the GNSS-derived orthometric heights using GEOID12B indicate that the two stations disagree with the published NAVD 88 height by almost 10 cm. This may be an indication that the station may have moved since the last time it was leveled. The question that needs to be addressed is should this station be used in the development of the next hybrid geoid model. In my mind, there are basically two school of thought on this topic. One, users that have used this individual station as control would like the hybrid geoid model to provide a GNSS-derived orthometric heights consistent with the published height of this station. If a surveyor followed the appropriate precise leveling procedures to check the validity of the station, that is, performed at least a two-mark leveling tie to ensure that the monument did not move, then they would want the model to be consistent with the published value. Two, if the station moved since it was last leveled, the hybrid geoid model would not provide the most accurate NAVD 88 height.
Table of GPS on BMs Residuals for KW0690
Click to enlarge.
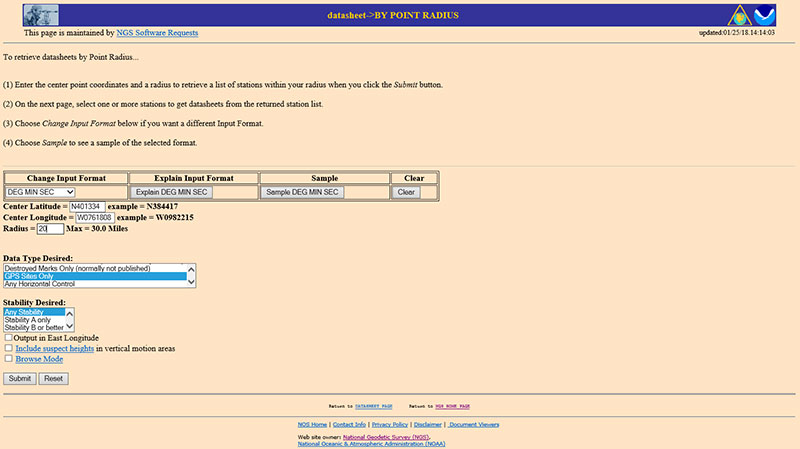
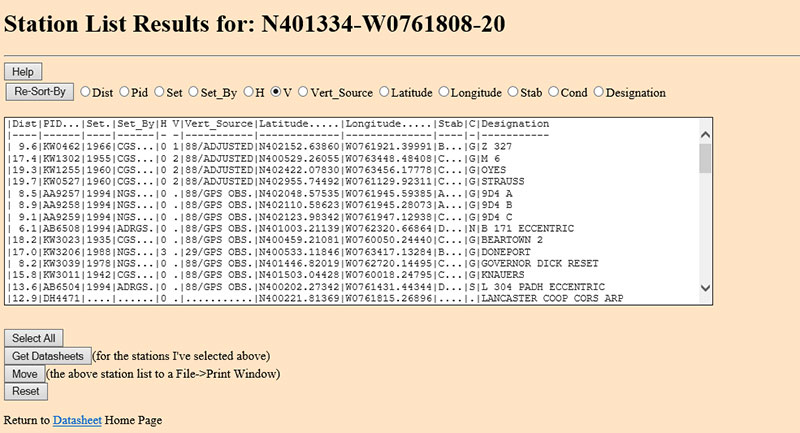
The next step is to analyze the GNSS-derived orthometric height using the latest experimental geoid model. Evaluating GPS on BMs stations nearby station KW0690 will help in determining if the station KW0690 has moved since the last time it was leveled. One way that users can determine stations nearby is to use NGS data sheet retrieval program using the option to retrieve stations by point radius. See box titled “Using NGS Data Sheet Point Radius Retrieval Option for KW0690.” The user enters a latitude and longitude value and a radius search in miles.
Using NGS Data Sheet Point Radius Retrieval Option for KW0690
Click to enlarge.
In this case, I entered the latitude and longitude of station KW0690, a radius of 20 miles (approximately 30 kilometers) and selected the option “GPS Stations Only.” The box titled “Output of NGS Data Sheet Point Radius Retrieval Option for KW0690” provides the output of the search. I sorted the stations by vertical control (“V”)
Output of NGS Data Sheet Point Radius Retrieval Option for KW0690
Click to enlarge.
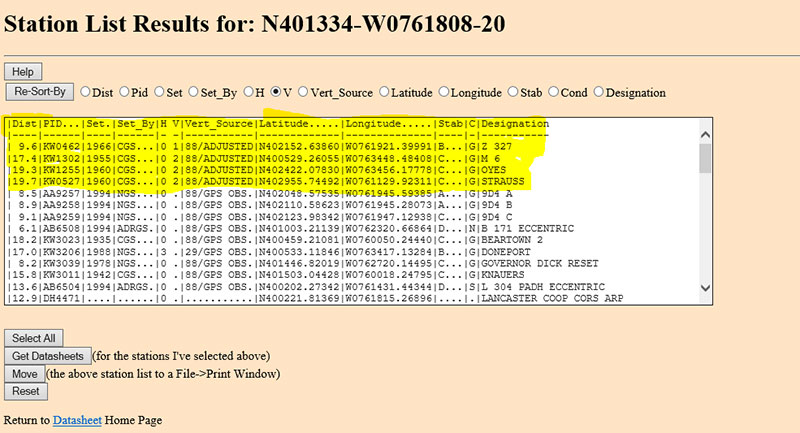
The four bench marks that also have GNSS-derived heights are highlighted in yellow in the box titled “Select the Bench Marks Based on NGS Data Sheet Point Radius Retrieval.” They are all within 20 miles (approximately 30 km) of the station KW0690. By analyzing the GPS on BMs residuals of these nearby stations we can determine if station KW0690 is consistent with its neighbors.
Select the Bench Marks Based on NGS Data Sheet Point Radius Retrieval
Click to enlarge.
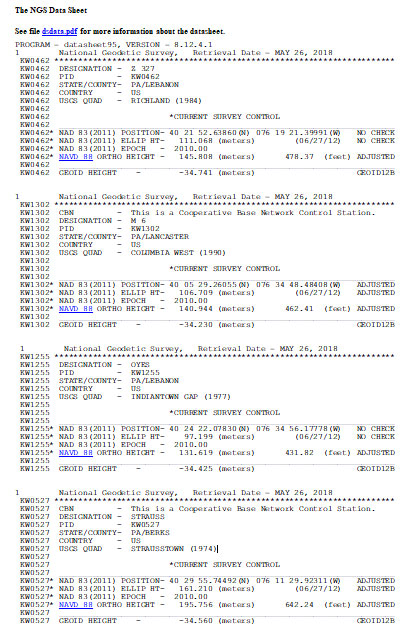
I retrieved the data sheets so I could get their published coordinates for the xGeoid17 web tool. See box titled “Excerpts from Data Sheets Based on NGS Data Sheet Point Radius Retrieval” for the data sheets.
Excerpts from Data Sheets Based on NGS Data Sheet Point Radius Retrieval
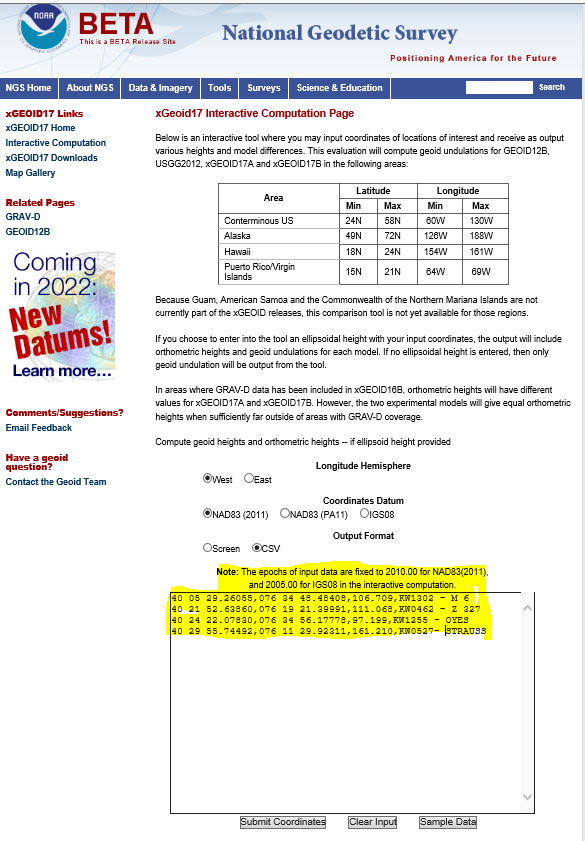
Once you have the stations that are located near the station you’re interested in you can proceed to the xGeoid17 website to obtain the latest information based on the scientific geoid model. I described this procedure in a previous column. See box titled “Using the xGeoid17 Web tool for Stations Nearby KW0690” for an example of the input to the tool.
Using the xGeoid17 Web tool for Stations Nearby KW0690
Click to enlarge.
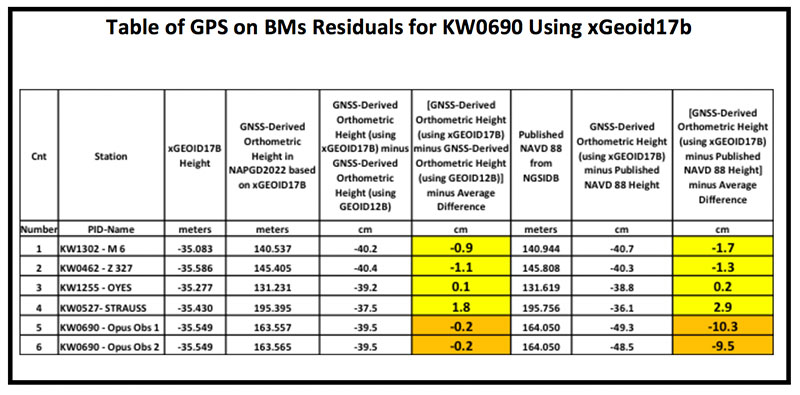
The table titled “Table of GPS on BMs Residuals for KW0690 Using xGeoid17b” provides a summary of the results from the xGeoid17 web page. The procedure used to compute the GPS on BMs residuals has been described in a previous column.
Table of GPS on BMs Residuals for KW0690 Using xGeoid17b
Click to enlarge.
Looking at the column labeled “[GNSS-Derived Orthometric Height (using xGEOID17B) minus Published NAVD 88 Height] minus Average Difference” indicate that the large difference that we noticed using GEOID12B at station KW0690 is also seen using the latest experimental geoid model xGeoid17b. Once again, this is an indication that the station may have moved since it was last leveled.
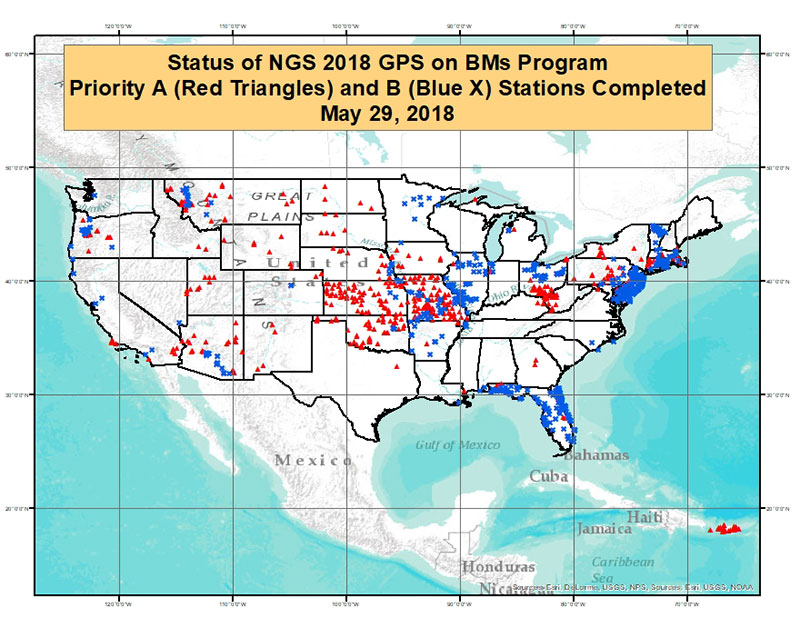
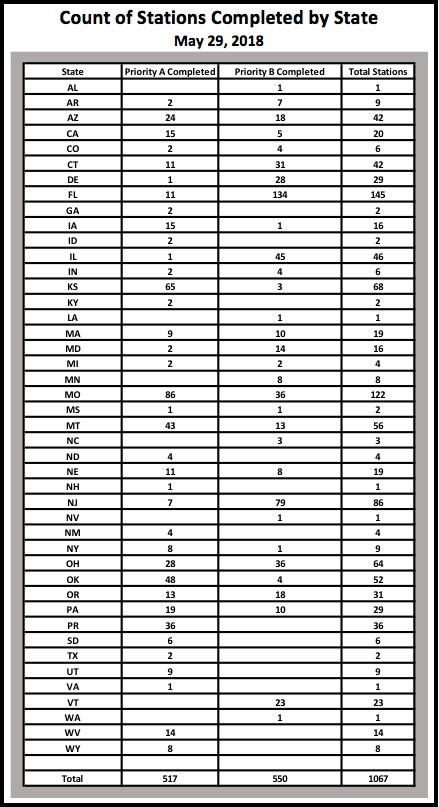
As of May 29, 2018, 1067 of the 5760 priority marks were completed. The box title “Status of NGS 2018 GPS on BMs Program as of May 29, 2018“ is a plot the stations that are labeled as completed and the box titled “Count of Stations Completed by State “ provides the number of stations completed by state. The red triangles are priority A stations completed and the blue “X” are priority B stations labeled as completed.
Status of NGS 2018 GPS on BMs Program as of May 29, 2018
Click to enlarge.
Count of Stations Completed by State May 29, 2018
The number of stations completed as of May 29, 2018, represents about 18.5 percent of the total number of stations that need to be observed. August 31, 2018, is only two months away. According to my latest search of the NGS website (June 3, 2018), 1098 stations are considered done. Hopefully, the number of completed stations will significantly increase during the next last two months. As I have explained in previous columns, there are many invalid GPS on BMs stations that may be used in the next hybrid geoid model unless more bench marks with valid NAVD 88 heights are observed with GNSS. This column provided an update and status report on stations observed in support of the 2018 GPS on BMs program and provided an example of how the OPUS Shared results as identified a station that may have moved since it was last leveled. This is your opportunity to help develop a current, valid hybrid geoid model in your area, and identify NAVD 88 bench marks that have moved since they were last leveled.
NovAtel’s Natasha Wong Ken offers a rundown on the company’s latest products — including its PwrPak7D enclosure, OEM7600 GNSS receiver and Inertial Explorer Xpress software — at Xponential 2018, which took place April 30-May 4 in Denver.
Inertial sensor companies KVH Industries and VectorNav Technologies partnered so that KVH’s fiber optic gyro-based 1750 and 1775 IMUs can now be offered to enhance the operation of VectorNav’s VN-210 and VN-310 Tactical Series GNSS-aided inertial navigation systems. In this video, VectorNav’s Jeremy Davis offers an overview of the partnership.
Topcon Positioning Group’s Dave Henderson explains how Topcon’s products are integrated in Intel’s Sirius Pro fixed-wing UAV and Falcon 8+ drone at Xponential 2018 in Denver. Henderson also gives an overview of the new Topcon payloads that will be available for the Falcon 8+.
SBG Systems’ Christophe Nicolopoulos offers GPS World a rundown on its latest products, including the Apogee Series, the Ekinox 2 Series, the Ellipse 2 Series and Ellipse Micro Series, at Xponential 2018 in Denver.