The National Geodetic Survey (NGS) is now developing the 2022 transformation model. Once again, NGS requests the assistance of the surveying and mapping community. This column provides examples to explain the symbology and use of the new version of the GPS on Bench Marks program for developing the 2022 transformation tool.
My last column discussed the results of the Beta hybrid Geoid18 model, and the differences between the Beta model and the official hybrid geoid model, Geoid12B. It provided examples to explain the symbology of the Beta Geoid18 Web Map. It was noted that NGS analysts rejected stations based on pre- and post-modeled residuals but many times there wasn’t enough redundant information available to ensure the station should be rejected or used in the creation of the hybrid geoid model. As I have mentioned before, users should be commended for their participation in the GPS on Bench Marks program. The Geoid18 model is still in “Beta” so, hopefully, users will continue their support by evaluating the Beta hybrid geoid model and reporting their issues to NGS. Saying that, NGS’ GPS on Bench Marks program is now in a different phase.
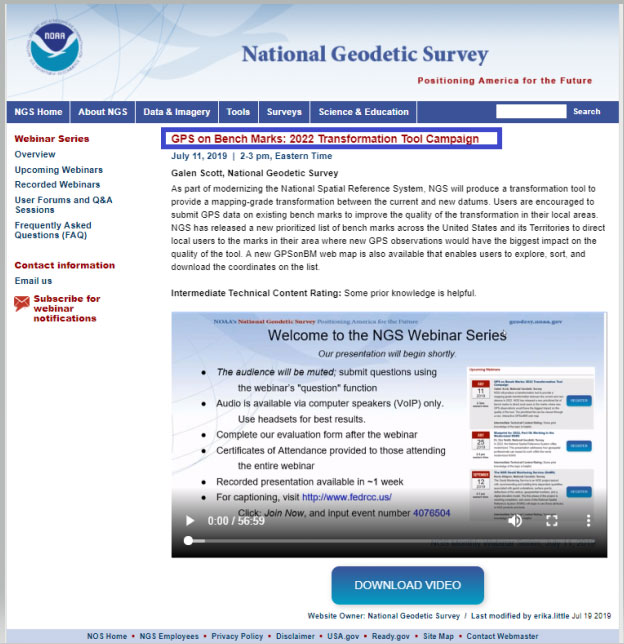
NGS held a webinar in July on the latest GPS on Bench Marks program for developing the 2022 Transformation tool. The webinar was recorded and users can find the presentation here. This was an excellent webinar and explained the functions of the web map. I would encourage readers to watch the webinar. It is an hour long but is worth while watching. See Figure 1 for information on the webinar.
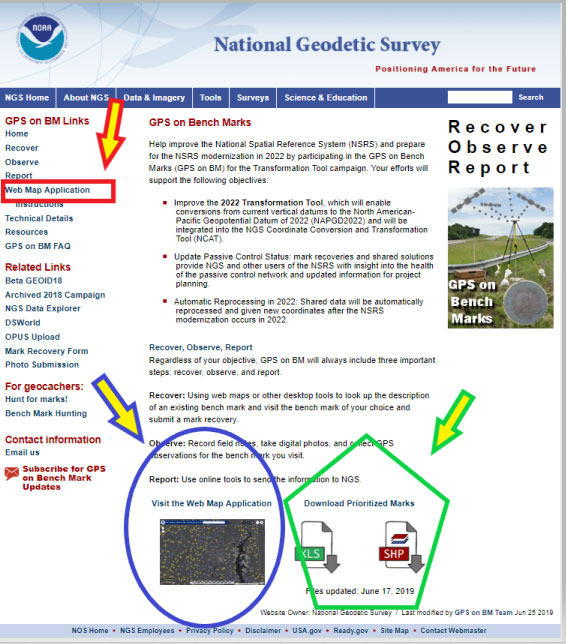
As in the past, the NGS on Bench Marks program can be accessed from NGS’ web page (see Figure 2). The user clicks on the “GPS on Bench Marks” button to access the program’s web page.
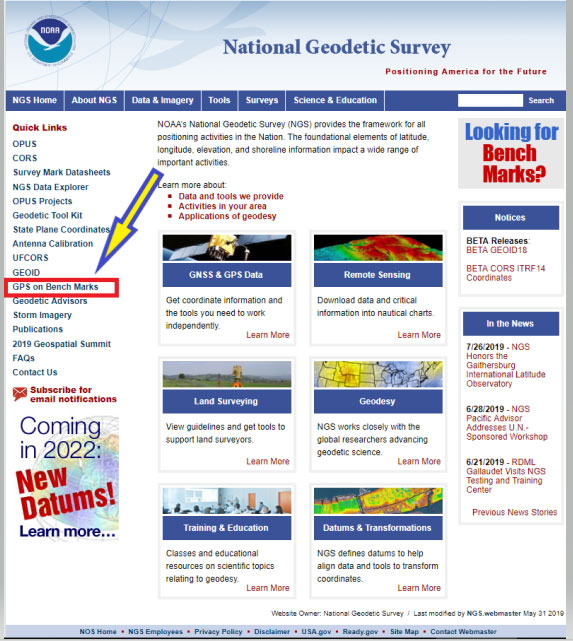
Figure 3 depicts the home web page of the GPS on Bench Marks Program.
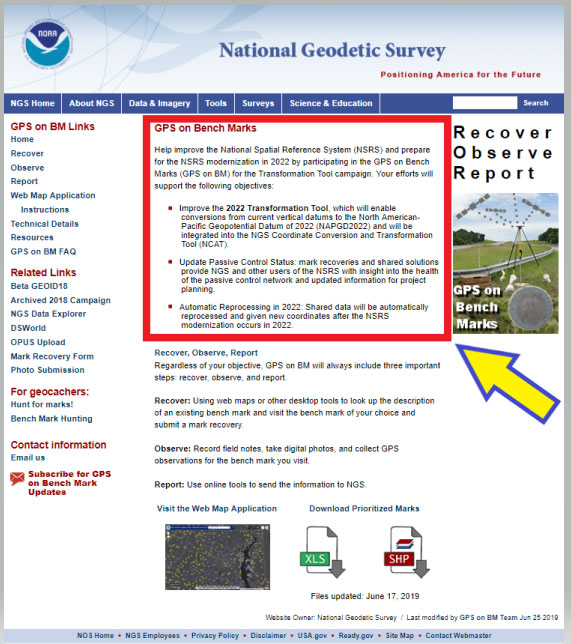
The web page provides several reasons why users should continue to participate in the GPS on Bench Marks program. Figure 4 lists three reasons for helping NGS develop the 2022 Transformation Tool.
Figure 4: Excerpt from GPS on Bench Marks Home Web PageGPS on Bench MarksHelp improve the National Spatial Reference System (NSRS) and prepare for the NSRS modernization in 2022 by participating in the GPS on Bench Marks (GPS on BM) for the Transformation Tool campaign. Your efforts will support the following objectives: • Improve the 2022 Transformation Tool, >which will enable conversions from current vertical datums to the North American-Pacific Geopotential Datum of 2022 (NAPGD2022) and will be integrated into the NGS Coordinate Conversion and Transformation Tool (NCAT). • Update Passive Control Status: mark recoveries and shared solutions provide NGS and other users of the NSRS with insight into the health of the passive control network and updated information for project planning. • Automatic Reprocessing in 2022: Shared data will be automatically reprocessed and given new coordinates after the NSRS modernization occurs in 2022. |
I’d like to highlight a few of the benefits for participating in the GPS on Bench Marks program.
(1) Improve the 2022 Transformation Tool, which will enable conversions from current vertical datums to the North American-Pacific Geopotential Datum of 2022 (NAPGD2022) and will be integrated into the NGS Coordinate Conversion and Transformation Tool (NCAT).
> A goal of the transformation tool is to provide a model that will allow users to convert from the current North American Vertical Datum of 1988 (NAVD 88) to the new North American – Pacific Geopotential Datum of 2022 (NAPGD2022). The more bench marks that are occupied by GNSS and included in OPUS Shared solutions will enable NGS to generate a more detailed relationship between NAVD 88 and NAPGD2022. This will provide an accurate transformation tool in local areas which will facilitate the implementation of NAPGD2022 in surveying and mapping products and services.
(2) Update Passive Control Status: mark recoveries and shared solutions provide NGS and other users of the NSRS with insight into the health of the passive control network and updated information for project planning.
> An important part of the GPS on Bench Marks program is that it provides an indication of the status of the station. The last time a bench mark was leveled to varies greatly across the Nation. Many of stations in NGS’ Integrated Dataset haven’t been visited in over 50 years. The GPS on Bench Mark program can be useful to identify stations that have moved since the last time it was part of a leveling project. The mark recoveries will provide the latest status of a station which will help others in future project planning. More important, in my opinion, is that the OPUS shared solutions will identify stations that no longer have valid NAVD 88 published heights, and should be used with caution and flagged with a warning
(3) Automatic Reprocessing in 2022: Shared data will be automatically reprocessed and given new coordinates after the NSRS modernization occurs in 2022.
>> Any station that is part of the GPS on Bench Marks program and included in the OPUS Shared solution database will be given 2022 coordinates. This means that users will not have to resubmit their data to obtain the new coordinates in the new 2022 reference frames. This information will be useful during the implementation phase of the 2022 reference frames.
As in the past, NGS is developing web-based products and services to facilitate users incorporating their data into the National Spatial Reference System (NSRS). They have developed a GPS on Bench Marks Web Map Application to inform users which stations they would like occupied by GNSS equipment. They realize that everyone is busy so they are trying to provide information, in near real time, on stations that have been occupied to reduce users occupying a station that already has two occupations. Figure 5 depicts the buttons that will connect the user to an interactive web map application. There are several ways the user can access the application: (1) click on the link titled “Web Map Application” – the red rectangle and arrow in the box titled “GPS on Bench Marks Web Map Application Site,” (2) click on the figure of the web based application – see the blue ellipse and blue arrow in the box, and (3) download the prioritized marks in XLS or Shape file format – see the green pentagon and green arrow in the box.
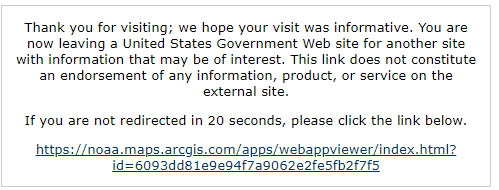
Clicking on the Web Map Application button or picture will direct the user to a new website. It informs the user that they are leaving a U.S. Government Web Site for another site. See Figure 6. The user can either click on the statement or just wait until they are redirected the website. (See Figure 7.)
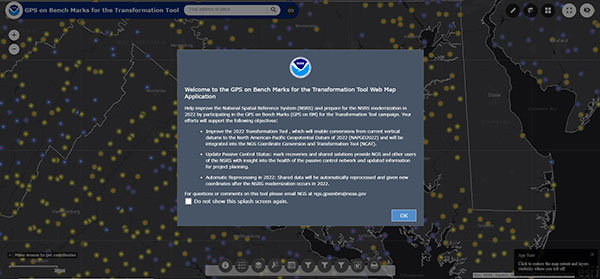
Just click on the “OK” button to remove the splash screen. You can click the button “Do not show this splash screen again” so it doesn’t show up every time you access the web page. At the bottom of the web map is a legend that provides information about the map and allows the user to select various options. Figure 8 provides an example of legend buttons. The information box appears by clicking on a particular icon in the legend bar (the arrows indicate the icon and information box for that icon).
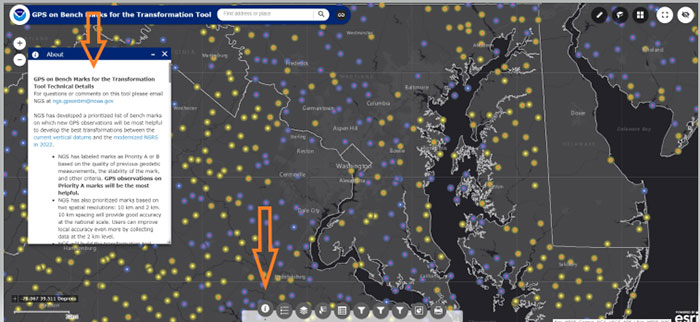
There’s a lot of information provided in the information box. There’s a scroll bar on the right side of the box that provides the entire write up. Figure 9 provides several sections of the write up. I’ve highlighted sections in the write up to emphasis what NGS is trying to accomplish. NGS’ goal is to minimize the amount of work performed by users and maximize the amount of GNSS data provided to the development of the 2022 transformation tool.
First, NGS has prioritized marks at two spatial resolutions: 10 km and 2 km. They want to reach a 10 km density to provide good national accuracy and a 2 km level to improve local accuracy. The Interactive Web Map allows users to zoom down to a level to identify individual stations selected by NGS. A 10-kilometer hexagonal lattice was developed to define the desired data density on the ground. For each hexagon, the goal was to identify a primary mark and a list of up to 4 secondary marks. The primary mark for each hexagon was added to the priority mark list. Secondary marks are listed and should be observed in cases where the primary mark cannot be found or is unobservable.
To reduce duplication, when a single mark within a 10 km hexagon has two GPS observations that meet NGS requirements, that hexagon is marked as done and the station is removed from the prioritized list. This will help to reduce the number of surveyors occupying the same station over and over again, and increase the number of prioritized stations occupied with GNSS. After a 10-kilometer hexagon is marked as done, a group of up to thirteen 2 km hexagons is generated to define the opportunities to densify the model with additional marks.
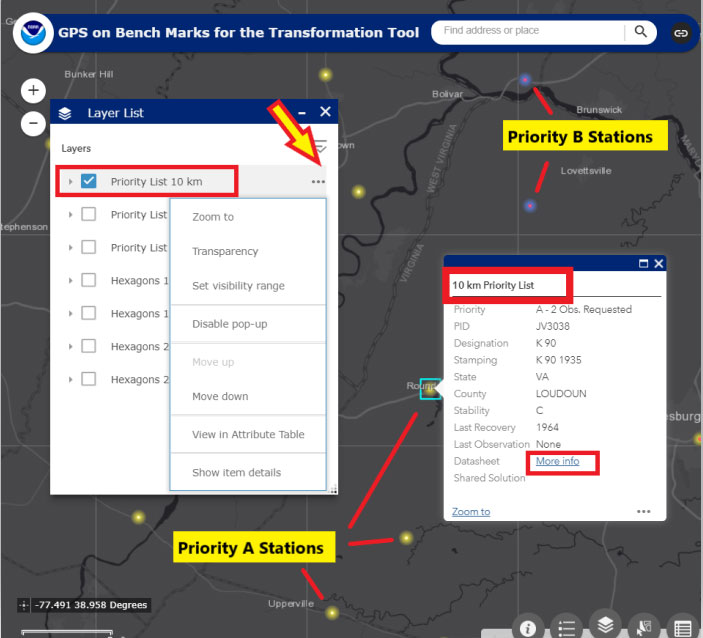
To assist in the selection of stations to be part of the GPS on Bench Marks program, NGS has prioritized stations as Priority A and B. Priority A being more important than priority B for the development of the 2022 transformation tool.
Figure 9: Excerpts from GPS on Bench Marks for the Transformation Tool Technical DetailsFor questions or comments on this tool please email NGS at [email protected]. NGS has developed a prioritized list of bench marks on which new GPS observations will be most helpful to develop the best transformations between the current vertical datums and the modernized NSRS in 2022. • NGS has labeled marks as Priority A or B based on the quality of previous geodetic measurements, the stability of the mark, and other criteria. GPS observations on Priority A marks will be the most helpful. • NGS has also prioritized marks based on two spatial resolutions: 10 km and 2 km. 10 km spacing will provide good accuracy at the national scale. Users can improve local accuracy even more by collecting data at the 2 km level. • NGS will build the transformation tool with data submitted by December 31, 2021. The tool will interpolate over areas without GPSonBM data, meaning that the transformations will be less accurate in those areas. Priorities A and B Priority A Priority B Spatial Resolution To prioritize marks based on the two spatial resolutions, NGS created the following system: • Once a 10 km hexagon is marked as done, a group of up to thirteen 2 km hexagons is generated to define the opportunities to densify the model with additional marks. |
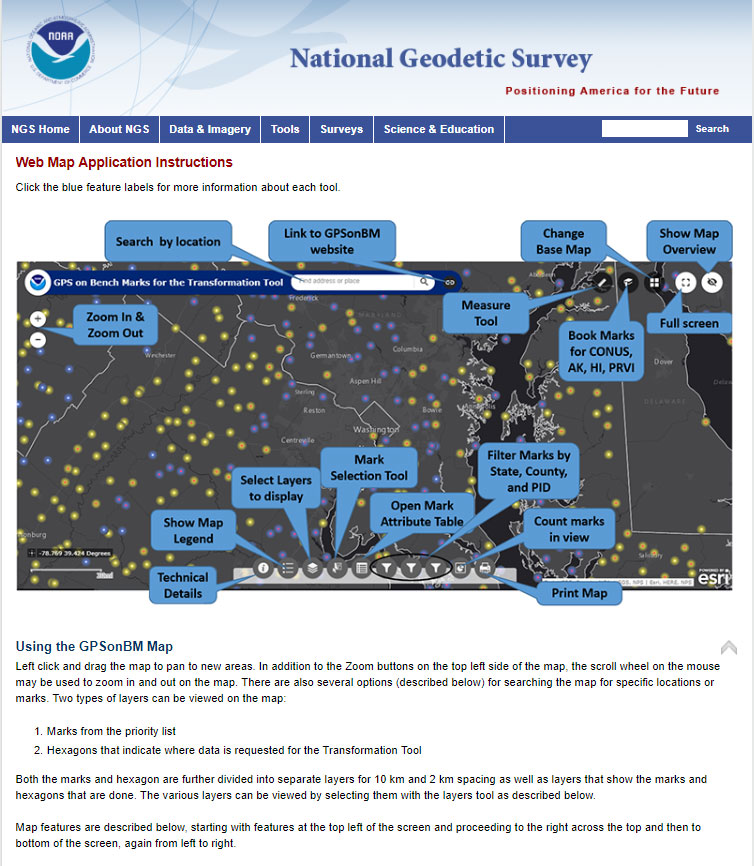
Clicking on the Web Map Applications “Instructions” button will provide a summary of all of the tools available on the Web Map. See the arrow in Figure 10. The instruction page provides a lot of information and explains the function of each tool.
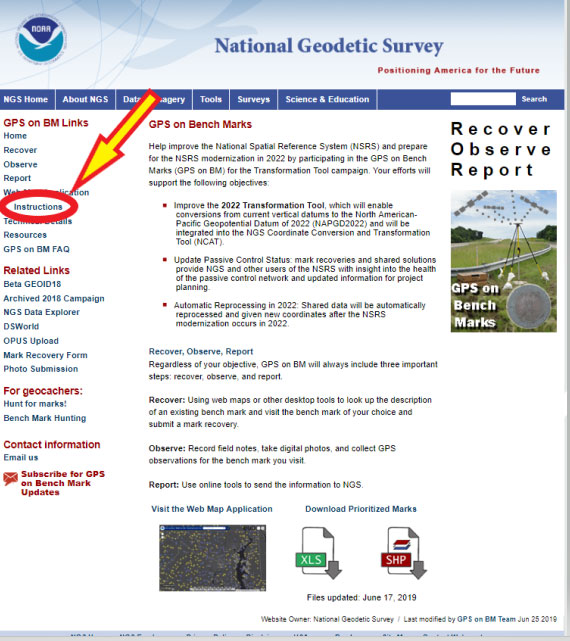
Figure 11 provides an excerpt from that web page. All of the icons on the Web Map are explained on a mock up of a sample map in the beginning of the Instruction web page.
The list of detailed descriptions of the tool is fairly long so I’ve provided some of the descriptions in Figure 12. The reader is referred to this page for the descriptions of all of the tools.
Figure 12: Partial List of Descriptions of GPS on Bench Marks Web Map Instructions ToolsLegend Layer List Layer Descriptions: 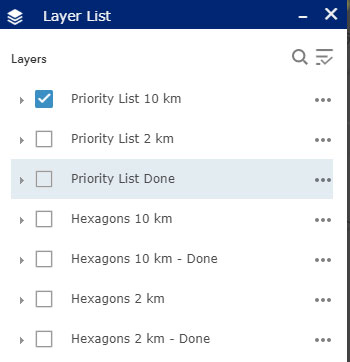 Working with the Layer List 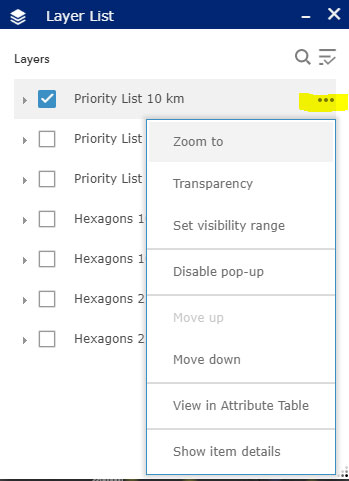 Mark Selection Tool: This tool provides several options for selecting marks. First, change the layer to select from, click in the box to the left of the layer name. Click the green Select box and choose a selection method, then use the mouse to left-click on the map to draw the selection region. Selected marks’ icons will turn blue. Once marks are selected, click on the ellipsis to the right of the layer to open menu of actions that can be performed with selected marks. Using this menu, selected marks can be exported into csv, JSON, and GeoJSON formats. 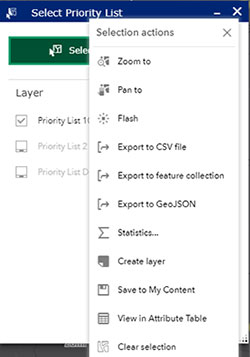 Attribute Table 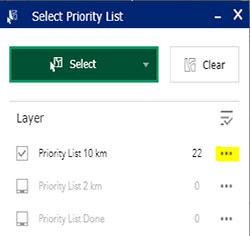 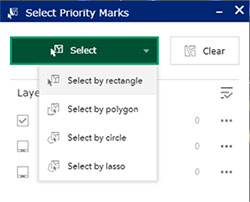 Filters By State, County, and PID: This tool allows the user to filter the marks on the map down to specific states, counties, or PIDS. After selecting the filter option, click on the switch at the top right of the filter box and the map will pan and zoom to the selected area. If the marks do not appear on the map, try zooming in until they appear. |
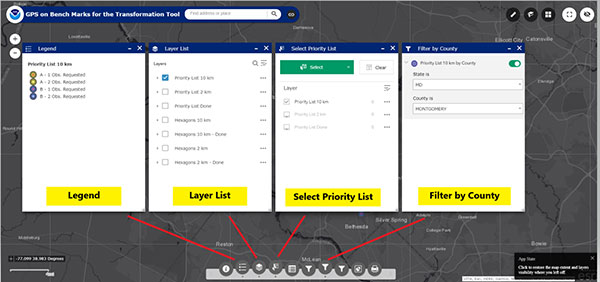
Figure 13 provides four different options of the icons on the bottom of the web map. They include the “Legend,” Layer List,” Select Priority List,” and Filter by State. These options help the user focus on a particular area of interest. I would encourage the user to familiar themselves with each of these options because they help will make it easier to navigate the map and identify priority stations.
Another important icon located at the bottom of the Web Map opens an attribute table of the bench marks. (See Figure 14). Once you open the Attribute table tool (see the red arrow in the box), a table of attributes of the stations appears at the bottom of the screen. If you click on a station in the table, the station gets highlighted on the map (see the blue arrow in the box). NGS’ Web Map Application makes it very easy to locate potential stations in a user’s area of interest.
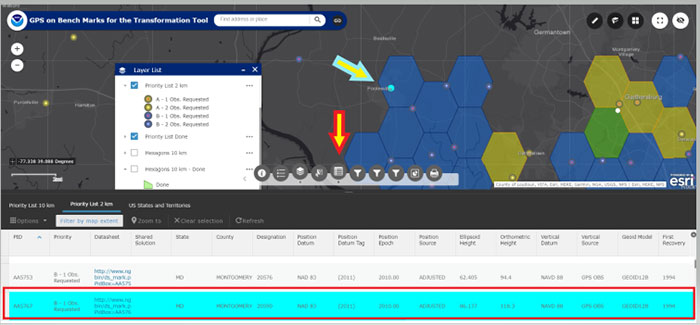
When the user clicks on the Layer List tool, they can select which priority list they would like to see plotted on the map. They can click on the “More Info” button to obtain the latest NGS Datasheet. Figure 15 provides an example of A and B stations from the 10 km priority list in the Loudoun County, Virginia, region. The map highlights priority A and B stations; the user can than find more information about a specific station by clicking on the map.
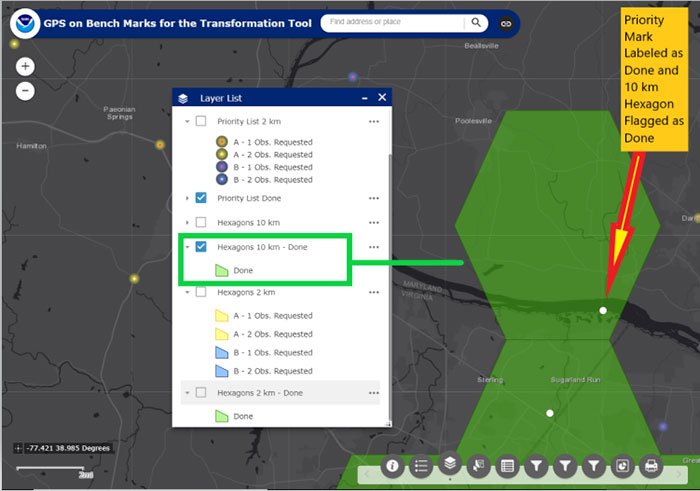
A very interesting feature is that once a station is classified as done in a 10 km hexagon, the hexagon is colored green and flagged as done. There is no longer a requirement to occupy a station in that hexagon to assist the 2022 transformation tool for the National level of accuracy. See Figure 16 to see a 10-km hexagon labeled as “Done.” Note that the station considered “Done” is labeled with a white circle.
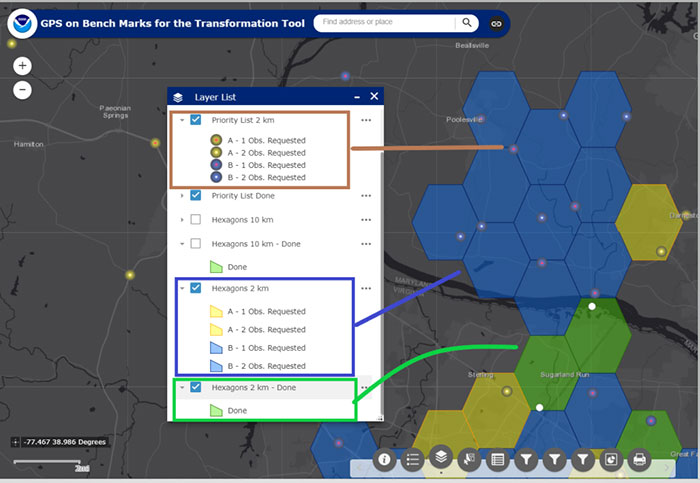
Now the user can focus on the 2-km hexagon boxes to identify stations to improve the local accuracy of the 2022 transformation tool in their area of interest. Figure 17 provides an example of the 2-km hexagons with priority marks plotted within each 2-km hexagon. Once again, the symbology indicates A and B stations, and the 2-km hexagons that need more observations and the hexagons that are labeled as “Done.”
NGS’ goal is to update the Interactive Web Map in “Near Real Time.” Of course, there’s always going to be some lag time from the time the user uploads their data into the OPUS Shared solution database to when the NGS 2022 Transformation Team reviews the data to ensure the results meet NGS’ criteria. Once again, NGS wants to minimize the amount of duplicate work performed by surveyors and maximize the number of stations contributing to the development of the 2022 transformation tool.
This newsletter highlighted the next phase of NGS’ GPS on Bench Marks program; that is, the development of the 2022 transformation model. The newsletter provided examples to explain the symbology and use of the new version of the GPS on Bench Marks program. It provided web links to material explaining the new GPS on Bench Marks program such as NGS’ July 2019 webinar on the latest GPS on Bench Marks program for developing the 2022 Transformation tool. NGS has done a tremendous job of explaining the importance, process, and results of the GPS on Bench Marks Program. Several of my previous newsletters have highlighted the NGS GPS on Bench Marks program and how users have supported the development of the hybrid Geoid18 model: Hopefully, this support will continue to develop the best possible 2022 Transformation Tool.