As off-the-shelf unmanned autonomous systems (UAS) become less expensive, easier to fly, and more adaptable for terrorist or military purposes, U.S. forces will increasingly be challenged by the need to quickly detect and identify such craft, especially in urban areas, where sight lines are limited and many objects may be moving at similar speeds.
To map small UAS in urban terrain, the U.S. Defense Advanced Research Projects Agency (DARPA) seeks innovative technologies to provide persistent, wide-area surveillance of all UAS operating below 1,000 feet in a large city. While the newAerial Dragnet program focuses on protecting military troops operating in urban settings overseas, the system could ultimately find civilian application to help protect U.S. metropolitan areas from UAS-enabled terrorist threats.
“Commercial websites currently exist that display in real time the tracks of relatively high and fast aircraft—from small general aviation planes to large airliners—all overlaid on geographical maps as they fly around the country and the world,” said Jeff Krolik, DARPA program manager. “We want a similar capability for identifying and tracking slower, low-flying unmanned aerial systems, particularly in urban environments.”
Although several systems are being developed for tracking small UAS by extending surveillance methods used in open areas where large line-of-sight buffers mitigate the threat, these systems are impractical for operation in urban terrain. Aerial Dragnet seeks to leapfrog these approaches by developing systems adapted to the fundamental physics of small UAS in urban environments that could enable non-line-of-sight (NLOS) tracking and identification of a wide range of slow, low-flying threats.
The program envisions a network of surveillance nodes, each providing coverage of a neighborhood-sized urban area, perhaps mounted on tethered or long-endurance UAS. Using sensor technologies that can look over and between buildings, the surveillance nodes would maintain UAS tracks even when the craft disappear from sight around corners or behind objects.
Low Cost Sensors, SDR. The output of the Aerial Dragnet would be a continually updated common operational picture of the airspace at altitudes below where current aircraft surveillance systems can monitor, disseminated electronically to authorized users via secure data links. Because of the large market for inexpensive small UAS, the program will focus on combining low-cost sensor hardware with software-defined signal processing hosted on existing UAS platforms. The resulting surveillance systems would thus be cost-effectively scalable for larger coverage areas and rapidly upgradeable as new, more capable and economical versions of component technologies become available.
The Aerial Dragnet program seeks teams with expertise in sensors, signal processing, and networked autonomy to achieve its goal. A solicitation detailing the goals and technical details of the program was posted here. A Proposers Day took place in late September.
Inertial, Gyroscope Take to Space
The concept image above shows the NEA Scout CubeSat with its solar sail deployed as it characterizes a near-Earth asteroid. (NASA)
Sensonor AS of Norway has partnered with the U.S. National Aeronautics and Space Administration (NASA) to supply current and future low- and near-Earth orbit space missions with inertial and gyroscope modules.
The Norway-based company first began supplying its standard inertial measurement unit (IMU) and gyroscope modules for low Earth orbit (LEO) space applications in 2012, Sensonor’s STIM300 and STIM210 inertial products now fly aboard several NASA spacecraft. Current projects using STIM inertial systems include the Raven technology demonstration and Near Earth Asteroid (NEA) Scout.
Raven, which launched to the International Space Station in September, will test key elements of an autonomous relative navigation system. Its technologies may one day help future robotic spacecraft autonomously and seamlessly rendezvous with other objects in motion, such as a satellite in need of fuel or a tumbling asteroid.
The NEA Scout is a robotic reconnaissance mission that will be deployed to fly by and return data from an asteroid representative of NEAs.
The STIM gyroscope modules are often used in combination with GPS or a Star Tracker and Kalman filter to orient and stabilize the satellite, as well as to provide feedback on satellite motion induced by its reaction wheels. In some applications, the gyroscopes are used to stabilize satellite-to-satellite communications.
Lighting Up Indoors for Retail Position
A new indoor positioning system uses LED lighting to pinpoint location for use in the retail industry. Researchers from the University of South Australia have developed an indoor positioning system that tracks movement with greater accuracy than contemporary RFID and Wi-Fi based systems.
Developer Siu Wai Ho said other methods of indoor positioning such as Wi-Fi were only accurate to within 1–2 metres and were easily hampered by radio frequencies from nearby devices, power sources or other wireless electronics. “Our system is more accurate with an error margin of 10cm and unlike some positioning systems our algorithm can calculate the orientation at the same time.”
LiPo uses LED lights as transmitters and photodetectors as receivers because they are both common items in modern societies. Photodetectors are a key component for capturing light and are also commonly found in smart phone cameras. The system uses a specially designed receiver to measure light intensity that is able to calculate position and orientation. Although it currently requires a unique receiver, developers hope to integrate the technology with the photodectors in mobile phones. This would reportedly enable supermarkets to provide customers with relevant information about items nearby.
“If you are in a supermarket you want to see some information for a product in front of you. One or two metres of error is still too big because it maybe gives you a product you are not in front of.”
Other applications could include the identification of objects or machinery in factories, movement aid tools for the elderly and trackers for museums to provide relevant information to tourists as they passed by exhibits.
Munich SatNav Summit Stresses GNSS Back-Up
“Is it Time for GNSS Back-Up?” has been announced as the the theme of the 2017 Munich Satellite Navigation Summit, to take place March 14–16.International experts gather to discuss recent position, navigation and timing develeopment and the necessity for GNSS backup solutions.
Among the topics, in addition to system updates on all major GNSS, we find listed: From Iridium to e-Loran — GNSS in need for a Backup; Galileo after the Brexit; Civil use of the Galileo Public Regulated Service (PRS); and Network-based solutions for GNSS Backup. Go to to www.munich-satellite-navigation-summit.org for registration information.
Xsens Offers Knowledge BASEd Inertial Motion Tracking
Xsens has launched BASE, an online technology platform with a community forum and a knowledge base on 3D motion tracking technology and products. BASE.xsens.com, contains inside information about micro-electro-mechanical system (MEMS) sensors, inertial measurement units (IMU), sensor fusion algorithms, body-motion tracking and motion capture.
It also provides best practices, tips and tricks for the use of Xsens’ MTi series, the MTw and the MVN wearable motion capture solutions. A second section of BASE is the community forum with direct access to Xsens’ engineers and other Xsens users.
There is no need to register for BASE to access the community forum and the knowledge base. To ask questions or comment on articles, registration is possible via SSO or email.
“Is it Time for GNSS Back-Up?” has been announced as the the theme of the 2017 Munich Satellite Navigation Summit, to take place March 14–16 in the prestigious and ornate Residenz Munich, royal palace of the Bavarian monarchs of the House of Wittelsbach in the center of Munich. International experts will gather to discuss recent position, navigation and timing developments and the necessity for GNSS backup solutions.
Among the topics, in addition to system updates on all major GNSS, the first conference announcement lists:
• From Iridium to e-Loran — GNSS in need for a Backup.
• Galileo after the Brexit.
• Civil use of the Galileo Public Regulated Service (PRS).
Acorn Technologies Inc., a semiconductor and wireless technology company focused on the Internet of Things (IoT), has developed and demonstrated new wireless long-term evolution (LTE) positioning technology for the location of things. The LTE location-based technology meets the new Enhanced 911 (E911) mandate performance requirements and performs well in very low bandwidth conditions. HellaPHY technology provides better than 50-meter accuracy for next generation location of things in the machine-type communications (MTC) and IoT markets.
Location of devices acts as an organizing principle for anything connected to the internet, helping organize the billions of internet-connected devices based on the sensors and other location-centric elements in them. The installed base of IoT endpoints will grow to more than 25 billion in 2019, hitting 30 billion in 2020, according to a recent IoT forecast.
“We are achieving accuracy in low bandwidth scenarios,” says Steven Caliguri, VP of wireless products at Acorn Technologies. “We believe that our advanced LTE positioning solution is the lowest complexity, lowest cost and lowest power solution available today for LTE based applications from high-end smartphones to loT.”
Acorn has demonstrated better than 50-meter accuracy in live network testing of their user equipment (UE)-based positioning algorithms for low bandwidth CAT-M devices. (Cat-M refers to Category M, the second generation of LTE chipsets meant for IoT applications.) The network tests were conducted on a network that has not been fully optimized for LTE-based positioning. Further gains are expected when optimizations begin to rollout.
Acorn’s network testing has demonstrated the ability to exceed the 2021 E911 mandated performance requirements even in low-bandwidth scenarios.
The technology has been developed from the core hellaPHY Channel Estimation algorithm that employs machine-learning techniques. The positioning algorithms are suited for IoT applications due to their extremely low complexity, and require less then 10 kilobytes of memory and only a fraction of a low-end DSP during the maximum processing interval. It has further proven to exceed the performance of super resolution algorithms at a fraction of the complexity.
HellaPHY RSTD is an advanced signal processing algorithm that was developed to improve LTE wireless network indoor and outdoor location accuracy. It is designed to be a drop-in replacement for existing Reference Signal Time Difference (RSTD) algorithms in UE chipsets and can be customized for any unique DSP or interface requirements. The hellaPHY RSTD IP core is designed to support advanced LTE features contemplated by operators as well as for LTE Release 14 including Positioning Reference Signals (PRS) muting, Cell-Specific Reference Signal (CRS) plus PRS transmit diversity, and fractional Ts reporting. The hellaPHY RSTD IP core is scalable and can support CAT-M through CAT-15.
(” … the ubiquitous parameter Ts. This nameless parameter is the most basic unit of time in the LTE air interface and pretty much everything in the LTE frame structure is based on multiples of this basic time unit, capital “T”, sub small “s”. Ts is defined exactly as: Ts = 1/(15000 x 2048) seconds, a little more than 32 nano-seconds.”
— from LTEuniversity.com)
Acorn Technologies is a provider of performance scaling semiconductor and wireless intellectual property for the Internet of Things. With nearly 200 patents issued and pending, Acorn’s IP addresses the fundamental building blocks with algorithms for wireless and IoT. The company’s semiconductor IP portfolio includes buried silicon stressors and metal insulator silicon technologies to significantly boost semiconductor transistor performance.
MicroUAVs Self-Navigate Indoors with Inertial, Cameras, More
The sensor-loaded quadcopters edged around obstacles and achieved target speeds of 20 meters per second in a cluttered Massachusetss hangar, during initial data collection for the U.S. Defense Advanced Research Projects Agency (DARPA) Fast Lightweight Autonomy (FLA) program.
The project develops and tests algorithms to reduce the amount of processing power, communications and human intervention needed for UAVs to accomplish low-level tasks.
If successful, FLA would reduce operator workload and stress and allow humans to focus on higher level supervision of multiple formations of manned and unmanned platforms as part of a single system.
Military teams patrolling dangerous overseas urban environments and rescue teams responding to disasters such as earthquakes or floods currently can use remotely piloted unmanned aerial vehicles (UAVs) to provide a bird’s-eye view of the situation.
But to know what’s going on inside an unstable building or a threatening indoor space often requires physical entry, which can put troops or civilian response teams in danger.
FLA technologies could be especially useful to address this pressing surveillance shortfall by furnishing operatives independent of communication with outside pilots or sensors and without reliance on GPS.
PNT Payload
The platform tested by DARPA researchers uses a commercial DJI Flamewheel 450 airframe, E600 motors with 12-inch propellers, and 3DR Pixhawk autopilot. It carries high-definition onboard cameras and other sensors, such as lidar, sonar and inertial measurement units.
The tests demonstrated autonomous capabilities such as seeing obstacles and flying around them at slow speed unaided by a human controller.
The three performer teams are Draper teamed with the Massachusetts Institute of Technology; the University of Pennsylvania; and Scientific Systems Company teamed with AeroVironment. Flights and data collection took place at Otis Air National Guard Base in Cape Cod, Massachusetts, with simulated walls, boxes and obstacles to test agility and speed.
The tests did produce several crashes. “The only way to achieve hard goals is to push physical systems and software to the limit,” said program manager Mark Micire. Continuing tests will obstruct the venue with more obstacles and clutter. “What makes the FLA program so challenging is finding the sweet spot of a small size, weight and power air vehicle with limited onboard computing power to perform a complex mission completely autonomously.”
Everyone talks about the weather, but nobody does anything about it — right?
Our lead authors this month are doing something about it.
The July cover story of GPS World magazine was titled “See into the Smoke with Inertial.” This month’s feature could have been called “See into the Fog with CDGNSS,” but we just didn’t have room in the already extensive article to go into that angle. So here it is.
Precise carrier-phase differential GNSS positioning will in the near future become a must-have complement to cameras and lidar for all-weather automated driving. Positioning will be furnished, as the article explains, by a dense reference network broadcasting to low-cost antennas for precise (10 centimeter) performance.
Here’s the kicker, not included in your cover-story package, although hinted at by the orange and green trapezoids on the cover, and replicated in the fog-bound version above.
Such vehicle positioning would enable new driver-assistance systems. With precise knowledge of a vehicle’s position and orientation, intuitive driving directions can be rendered on the windshield in luminous paths that appear to be painted on the roadway. These paths will guide the driver along the fastest route to destination. Other symbols will suggest lane changes for safety or efficiency, and highlight the presence of vehicles dangerously close ahead. Because satellite navigation signals are not affected by rain, snow or fog, they can be combined with radar sensors to safely guide a driver or an automated vehicle in all weather.
As author Todd Humphreys explains it, “Imagine how relaxing it would be to follow a yellow brick road safely home! I envisioned this augmented-reality heads-up display during a recent road trip. Driving on unfamiliar roads, I was trying to interpret various route options on my wife’s smartphone while simultaneously fielding questions (in Spanish!) from my in-laws, and more questions from my nine-year old son. It was too much to ask of one driver!”
Not any more. That is, soon, in our brave new future, no longer.
It’s getting bigger all the time, GPS/GNSS business. And coming along in its wake, starting to grow like a sproutly little brother, is GPS anti-jamming, to safeguard the signal in various scenarios.
The anti-jamming market for GPS is expected to reach US$4.8 billion in value and 309.2 thousand units in volume by 2022, according to a newly released report by Research and Markets, a Dublin, Ireland-based market research “store.”
Anti-jam technology sales revenue will increase at a compound annual growth rate (CAGR) of 7.0 percent between 2016 and 2022, while volume goes up 10.1 percent. Major drivers at the moment lie in the military sector, but that could well change in the next decade. The proliferation of low-cost GPS jammers is seeing to that.
Meanwhile, any armed force that puts its faith in guided missiles now feels the acute need for a secured weapons system, something not easy to accomplish. Flight-control applications are especially vulnerable.
North America is the largest and most dynamic sector of the anti-jamming market, given its powerful military and the presence of three top players in the anti-jamming market for GPS: Rockwell Collins Inc. (U.S.), The Raytheon Company (U.S.) and NovAtel Inc. (Canada).
Other companies cited by the report, and given each their own subsection, are Cobham, Mayflower Communications, BAE Systems, Furuno Electric Company, Harris Corporation, Lockheed Martin, Thales Group, Boeing and u-blox.
Breaking down by receiver type, the report studies two major categories: military and government grade, and commercial transportation grade. The market is also analyzed geographically, with sub-sub-subsections devoted to “Threat From North Korea and Disputes With China,” “Dispute in the South China Sea,” and “The Crisis in Syria and Isis.”
Aside from looking — or deriving, more often — numbers according to Anti-Jamming Technique (nulling systems, beam-steering systems and civilian systems), the report does not concern itself overly with technical details. These usually are of little interest to investors, the report’s main target. Thus it will have little of interest for engineers, except for those practicing business development.
A market breakdown by application lists:
flight control
surveillance and reconnaissance
position, navigation and timing
targeting
casualty evacuation
timing installations
logistics tracking
law enforcement
From the Executive Summary:
“The nulling systems type of anti-jamming techniques accounted for a share of 70.0% in 2015; the market was valued at USD 2,180.3 million in the same year and is expected to grow at a CAGR of 6.7% between 2016 and 2022. The market for beam steering systems was valued at USD 662.8 million in 2015 and is expected to grow at a CAGR of 6.9% during the forecast period. A major reason for beam steering systems holding such a low market share is that they are comparatively new in the market since the last decades and hence are not widely used. They are very expensive and are used only on high-end military vehicles such as strike aircrafts. For a long time nulling systems was the only known type of GPS anti-jamming technique. However, with the development of beam steering systems and the civilian anti jamming systems, the market for GPS anti-jamming is expected to increase.”
In July, GPS World asked the experts, “What percent of a GNSS designer or manufacturer’s R&D budget should be devoted to mitigation of jamming?”
“Solving for jamming, intentional or unintentional, in the design of any GNSS technology platform is no longer an option. How much any one company spends is largely a function of how much is spent on engineering overall and of how much has already been invested upfront on jamming mitigation. The required level of jamming resistance of any PNT solution also depends very much on the particular application, which in turn influences the budget allocated.”
“GNSS jamming is a growing concern, and an assessment of risks and an element of testing against the most applicable real world threats should be included as part of every developer’s engineering process. Spirent has decades of experience in providing test equipment and services to engineers working to understand and mitigate jamming threats. We have seen increased investment by designers and integrators of PNT systems that are driven to provide robust/resilient solutions to their customers.”
“While some receivers already incorporate jamming protection (e.g., CW excision), more sophisticated methods (for example, against broad-band jamming and spoofing) should be incorporated into perspective products. The percentage of R&D budget depends on a line of business. For manufactures pursuing applications such as military and critical infrastructure, the number can be as high as 50 percent. For many civilian applications a potential impact of jamming is less damaging. Yet, from 10 percent to 20 percent should be still allocated.”
GPS marks yet another rite of passage with the publication of Pinpoint: a full-length journalistic investigation of its development, personalities and societal impact, with a diverting assortment of side stories and philosophical illuminations. A technology can be said to have arrived when it receives this manner of broad-market, though rigorous, intelligent, probing treatment. Never mind that every such technology truly arrived long before their books were written.
This is not a book to give to friends and relations who ask you “How the heck does GPS work?” It does spend a bit of time on that subject, a very little bit. Neither is it a history of GPS. Author Greg Milner spends a bit more time on that topic, and his direct sources are impeccable. The major portion of the book is devoted to “contemporary history,” if there is such a thing: the sprawling tentacle-like growth of GPS into many industries and aspects of modern life.
Milner does not chronicle every one or even a plurality of these diverse fields. One gets the feeling he pretty much followed his journalistic nose into whatever interested him. Sections explore early receiver development, electrical power, financial markets, tracking (both personal and fleet), agriculture with a focus on the sugar beet, auto navigation, and a few more. Throughout, Milner pushes forward anecdotes — personal recollection of many, many diverse contributors and benefitees, or in a few cases, victims. One chapter bears the title “Death by GPS.”
He takes long, looping sidetrips that are always interesting, far though they may wander. The most notable case is that of Polynesian cross-Pacific navigation, a mental construct called etak, which takes up, at length, the first chapter of the book. We become aware that possibly what interests Milner most is navigation as a state of mind. He attempts to tie it all together at the end; it doesn’t quite work, but the many questions he raises along the way are certainly worth pondering.
Two examples, only pages apart. In an investigation of the legality and Constitutional issues of tracking and surveillance by law enforcement, he states: “GPS provides the possibility of omniscience, unlike any previous technology. There is nothing ‘natural’ about using GPS to keep a continuous inventory of the world’s moving parts. It reflects a choice, a conscious application of a neutral technology . . . GPS itself is a blank slate onto which we project our desires.”
And in a section on marketing: “Stickiness, a term online marketers apply to websites that encourage repeat visits, could also describe how GPS lets us ‘build situational contexts around things and people to create new meanings, associations and stickiness of disparate data. The simplest example is when we use a program like Google Maps to learn about our location, a sticky query that draws in satellite mapping, ground-level photography, and business information.”
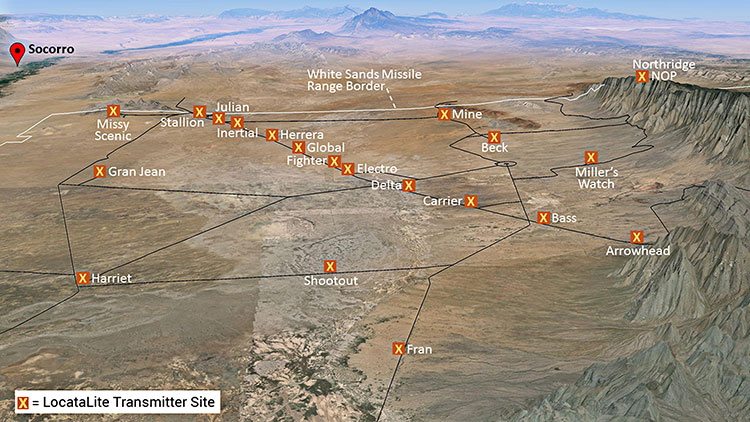
Non-GPS positioning system, White Sands North Range. X = transmitter site. (Photo: U.S. Air force, 746 Test Squadron)
Can’t Deny the Truth: Defeating the Jamming Threat
Initial Operational Capability for the Ultra High-Accuracy Reference System has been declared by the U.S. Air Force. Even when GPS is being completely jammed, UHARS provides extremely accurate positioning, navigation and time — more accurate than GPS — over the large area of White Sands Missile Range in New Mexico.
Amid a growing concern about GPS jamming in military areas of operation, testing GPS receivers and antenna systems in a GPS-denied environment has become increasingly important to Department of Defense (DoD) agencies. However, since GPS is often the “gold standard” position, navigation and time information that serves as a truth reference during field and flight testing, conducting tests in an area that has no GPS availability because of intense jamming makes it difficult to compare observed position and navigation data to a valid truth source. Moreover, to evaluate system performance with appropriate statistical significance, the reference system against which test results are measured needs to be significantly more accurate than the system under test. Therefore, when the system under test is GPS itself, this poses an interesting problem.
FIGURE 1: CIGTF Reference System (CRS) (Photo: U.S. Air force, 746 Test Squadron)
For more than a decade, the 746th Test Squadron (746 TS), also known as the Central Inertial and GPS Test Facility (CIGTF), has met this requirement by employing its CIGTF Reference System (CRS). The CRS (Figure 1) is a system of navigation sensors that evaluates combinations of its subsystem measurements in an extended Kalman filter/smoother algorithm to produce an optimal reference trajectory. Delivering sub-meter accuracy in non-GPS-jammed environments and meter-level accuracy in GPS-jammed environments, the CRS is arguably the most accurate reference system in the DoD. However, many future DoD weapons systems are projected to require tighter navigation accuracies in GPS-denied environments, and as these requirements improve, the reference system against which they are evaluated must improve accordingly. To meet these test and evaluation reference requirements in a GPS-denied environment, a new reference system is needed.
The 746 TS embarked on the development of the Ultra High Accuracy Reference System (UHARS), a next generation reference system that meets test and evaluation reference requirements for future navigation and guidance systems. UHARS consists of a rack-mounted, tightly integrated system of improved navigation sensors/subsystems, data acquisition system (DAS) and a new post-mission reference trajectory algorithm. The complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.
Non-GPS Based. Achieving these accurate reference solutions requires a Non-GPS Based Positioning System (NGBPS) subsystem capable of operating and providing sub-meter position accuracy in a GPS-denied (jamming) environment. The NGBPS portion of the UHARS program employs a network of ground-based LocataLite transceivers and test vehicle receivers (also called rovers). Although the NGBPS uses standard commercial LocataLites and rovers, meeting the demanding UHARS accuracy and distance requirements of better than 18 centimeters accuracy over a 30-mile range in a flight configuration necessitated some additional testing and development of transmit antennas, external signal amplification, navigational software for flight dynamics, as well as the addition of a centralized command and control (C2) capability so the network could be remotely controlled, across the range, from the 746 TS building at Holloman Air Force Base.
Background
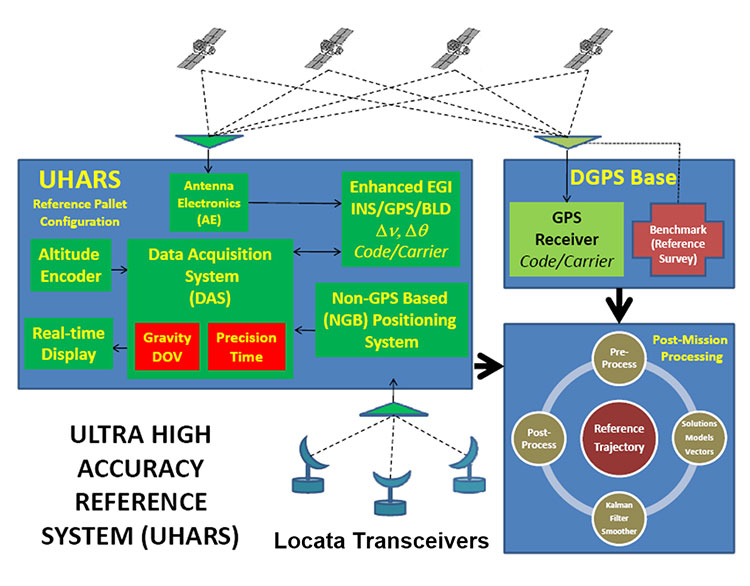
FIGURE 2: UHARS architecture. (Photo: U.S. Air force, 746 Test Squadron)
The UHARS architecture (Figure 2) is comprised of three major subsystems which include the Enhanced Embedded GPS/INS (EGI), Locata NGBPS and GPS Antenna with Antenna Electronics (AE). Other key technologies include the DAS, Differential GPS (DGPS) Base Station and Reference Trajectory Algorithm.
The NGBPS rover collects 10.23 MHz chipped code pseudorange and carrier-phase measurements at selectable rates of 1, 5 and 10 Hz. The system uses a patented timing process which tightly synchronizes all LocataLites in the network. With this done, data from the Locata test bed receiver can be processed exactly like survey-grade GPS measurements, but without the need for differential corrections.
Each LocataLite transmits on two spatially diverse signals from two separate antennas at two frequencies within the 2.4-GHz industrial, scientific and medical (ISM) frequency band, 2434.740 MHz and 2462.361 MHz, for a total of four spatially and frequency diverse signals. That signal structure provides precise positioning signals that are both resistant to GPS L1 and L2 jamming and also provide highly accurate positioning.
Overview
FIGURE 3: Locata solar aluminum transportable trailer (LSATT). (Photo: U.S. Air force, 746 Test Squadron)
The deployed system includes 16 Locata Solar Aluminum Transportable Trailers (LSATT) with flexible power options that integrate both shore power (110V AC) and reusable solar power (Figure 3). The trailer configuration enables easy transportation of major NGBPS components on and off WSMR, allowing for easy reconfiguration of the network or deployment to other test ranges if required.
The NGBPS design currently includes 20 geographically separated deployment sites, 16 of which are populated with LocataLites, over a 20 x 20 mile area on WSMR North Range (see opening figure). This configuration can be scaled to cover an even larger area when required.
FIGURE 4. NGBPS transmitter site. (Photo: U.S. Air force, 746 Test Squadron)
Each site contains permanent monumentation for the two spatially diverse transmit antennas (two monuments per site; 40 total). Figure 4 shows a typical monument site which is equipped with a quadrifilar helix S-band transmit antenna, and one monument also supports the 2.4-GHz receive dish antenna. The monuments and antennas are integrated with an LSATT, UHF-band (350-360 MHz) wireless architecture for the command and control element, and a meteorological (MET) station made by Vaisala. The MET station measures and collects temperature, pressure and relative humidity data,for calculating tropospheric corrections which are then transmitted as part of the positioning signal generated by a LocataLite for use across the network.
FIGURE 5: NGBPS C2 repeater station. (Photo: U.S. Air force, 746 Test Squadron)
The system is operated, controlled and monitored using either the fixed C2 center located at the 746 TS, Holloman AFB, NM or the mobile C2 Center. The mobile C2 is typically located on the WSMR-North Range to support test events. Two repeater stations (Figure 5) are installed at WSMR-North Range to enable long distance remote/wireless C2 communications with the NGBPS network.
Site Architecture
The LSATT includes integrated hardware and software to produce the NGBPS network. The heart of the NGBPS is the LocataLite transceiver, which provides the ranging signals used by the rover to compute position and time information. The same signals are used by each LocataLite for nanosecond-level synchronization across the network. The MET station, mounted on monumentation along with a transmit antenna, collects temperature, pressure and relative humidity data and relays it to the LocataLite for inclusion in the transmitted navigation signal. The LocataLite provides the exciter signal to two Mini-Circuits amplifiers which boost the RF power to around 10 watts for each transmit antenna, providing signal coverage over the large geographical area of WSMR-North Range. The wireless modem relays Locata and MET data to and from the C2 centers using various package compression techniques to ensure data are not lost during transmission. The modem provides 4 watts of power operating in the UHF-Band with a directional high gain antenna.
Situated in the New Mexico desert, the LSATT is also required to operate during extreme weather conditions, necessitating the employment of water-tight containers and temperature reducing mechanisms to protect its commercial subsystems. Accordingly, a filtered fan configuration mitigates elevated temperatures during operation.
Each LSATT also possesses an intelligent low power controller that supports the various communication protocols within the equipment enclosure. A comprehensive and expandable feature of the controller design enables a centralized methodology for data collection, health and status information and C2 functions. The controller interfaces with the LocataLite transceiver, MET station, amplifiers, and power supply sources. Information is collected and packetized for efficient transmission via the wireless modem. Commands from the fixed or mobile C2 center are received and implemented by the controller. During non-operating periods, the controller reduces power consumption by shutting down non-essential equipment. Likewise, the controller itself enters a stand-by mode until reactivated by the C2 center via the wireless modem. The controller provides a redundant data archive capability and autonomously manages operations in the unlikely event of a wireless communication outage with the C2 Centers. The controller is programmed to shut down after a definable period if C2 communication links cannot be re-established.
The NGBPS design provides pre-, live- and post-mission support through remote wireless C2 operations. This support includes real-time status monitoring and a net-centric architecture for C2 of remote locations. As C2 outages are detected, the wireless network autonomously attempts to self-repair and return the network to an operational state.
Verification and Validation
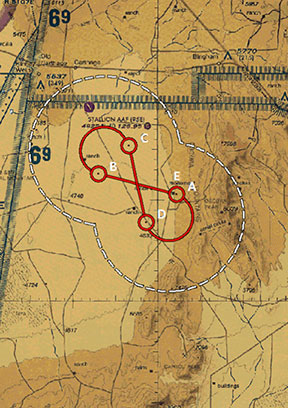
FIGURE 6: A typical NGBPS clear air flight profile. (Photo: U.S. Air force, 746 Test Squadron)
After all network and C2 software activities had been completed, TMC Design Corporation conducted a Final System Verification (FSV) on the fully fielded NGBPS system on WSMR. The FSV ensured all contractual requirements were adequately met prior to release to the 746 TS for government operations. It included verifying successful communication through the UHF network and ensured that the rover could obtain and process information from each LSATT site in view. Additionally, a mission duration test was performed to ensure the system could operate for the period of a standard mission window without depleting the battery system.
Upon completion of the FSV in September 2014, the 746 TS conducted a series of flight tests to:
Measure the NGBPS PDOP over the WSMR fielded area.
Compare the measured PDOP values to the developed PDOP model.
Evaluate carrier-phase solution with an objective accuracy of
FIGURE 7: USAF C-12J aircraft fitted with Locata antenna. (Photo: U.S. Air force, 746 Test Squadron)
Once the squadron’s PDOP model was verified, flight profiles were carefully devised to stay within the NGBPS PDOP < 3 envelope (Figure 6). However, since the 746 TS also sought to evaluate other UHARS components, both individually and as a system, additional flight profiles were flown. When these flight profiles happened to meet NGBPS PDOP criteria, performance was recorded and analyzed. All flight profiles were flown at varying altitudes, aircraft speed and time of day in order to test the NGBPS network performance under a wide range of scenarios.
Although an operational UHARS will ultimately provide an exceptional reference solution in a GPS-denied environment, GPS signals needed to be available during NGBPS validation in order to evaluate the Locata navigation carrier-phase solution against a Differential GPS carrier-phase solution. Thus, all NGBPS validation testing was conducted in clear, unjammed environments. Now that system performance is verified in this NGBPS configuration, it can be used as the primary source of positioning when the GPS signals are denied.
Flight trials were conducted using the USAF C-12J aircraft (Figure 7) integrated with one quadrifilar helix S-band receive antenna. The NGBPS receiver was integrated in the UHARS flight pallet, and a DAS was connected to the receiver to log specific receiver and health data required for post-test data analysis.
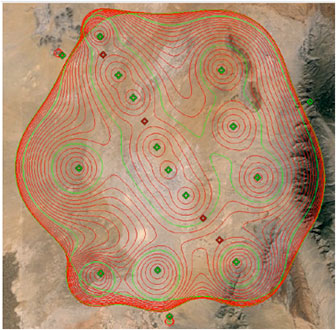
FIGURE 8: NGBPS PDOP plot. (Photo: U.S. Air force, 746 Test Squadron)
Figure 8 illustrates the top-down view of the predicted PDOP=3 boundaries across the NGBPS network on WSMR. The PDOP volume coverage is shown in 1000 ft. increments (red lines) from 5K to 30K ft. MSL. The green lines are at 10K, 20K and 30K ft. The flight profiles were flown within the PDOP volume footprint to obtain carrier-phase solutions.
Results
The 746 TS conducted extensive flight tests where the NGBPS system was tested under operationally realistic conditions. Preliminary test results have proven good enough to declare Initial Operational Capability (IOC) for use by the 746 TS’s many DoD and Government customers. Not only does the network deliver centimeter-level positioning and navigation, but also nanosecond-level synchronization, which may be useful for military applications requiring precise time transfer in GPS-denied environments. Working in concert with other UHARS components, the LocataNet supports a reference solution which outperforms the CRS in GPS-denied environments.
“Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the USAF’s current CRS, so it is perfectly able to support current customer requirements,” said Jim Brewer, chief scientist of the 746 TS. “However, more data are required to tune the UHARS filter and optimize its accuracy to meet even tighter PNT requirements, which is our objective. When this is achieved, UHARS will deliver truth accuracy for next-generation military capabilities, and we will declare UHARS at Full Operational Capability.”
“UHARS is a rack-mounted, tightly integrated system of improved navigation sensors, a data acquisition system and a new post-mission Kalman filter, all of which need to work together,” explained John Cao, technical director of the 746 TS. “It’s working very well, but once we completely measure and characterize the individual components and then tune and validate the filter, the complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.”
Summary & Conclusions
As designed, deployed, and validated, this tailored network provides accurate 3D positioning, completely independent of GPS and while traveling in a dynamic aircraft flight profile. This enables the US government to test, evaluate, and assess capabilities in GPS-denied environments.
Based on successful results of the original technical demonstration at WSMR in a real-world end-to-end environment, the USAF proceeded to the NGBPS production and fielding phase in 2012.
The currently installed network infrastructure on WSMR includes 20 permanent monument sites, 16 LSATT trailers installed in select initial site locations, comprehensive C2 software and solar and battery power for all sites. The system is self-contained, remotely operated and possesses high quality, reliability and safe operation attributes. Its NGBPS capability is now core to the UHARS that is replacing the CRS.
Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the USAF’s current CRS truth system, and the 746 TS has therefore declared Initial Operational Capability (IOC) for UHARS, making it immediately available to support customers requiring an accurate non-GPS-based solution. Further verification testing will enable the squadron to fine tune the UHARS filter and optimize its accuracy even further to meet even tighter PNT requirements. At that time UHARS Full Operational Capability (FOC) will be declared.
Customers interested in leveraging UHARS into their test programs should contact the 746 TS at (575) 679-2123 or [email protected] for scheduling information.
Manufacturers
LocataLites, Locata rovers and the software/firmware that enables the TimeLoc synchronization technology which creates the LocataNet are manufactured and supplied by Locata Corporation. The S-band transmit antenna was made by Cooper Antennas Ltd.
The 746 TS awarded two separate sole-source contracts for NGBPS. The Locata Corporation was contracted to provide production transceivers and rovers, navigation algorithms required for data analysis and subject matter expertise. The TMC Design Corporation was contracted to develop the hardware to house and field the Locata network, develop the command and control hardware and software, and then physically field the production hardware at WSMR.
KEY NGBPS requirements
After successful completion of the technical demonstration in 2011, in which all of these key technical requirements were demonstrated, the USAF awarded contracts to field the NGBPS.
Carrier-phase “truth-reference” solution of < 18 cm Three Dimensional Root Mean Square (3dRMS), with a Position Dilution of Precision (PDOP) < 3.0.
Rover receivers acquiring and tracking Locata signals at a range greater than 30 miles (48 km).
Accurate and reliable TimeLoc synchronization over the test area, the ability to “cascade” TimeLoc from one LocataLite to another, plus the delivery of nanosecond-level synchronized time on the Range while GPS time is unavailable because of GPS jamming.
External signal amplification to support the extended signal range requirement while still maintaining nanosecond-level TimeLoc integrity.
Rover receiver tracking loops perform adequately under flight dynamics.
Tropospheric measurement and modeling to ameliorate the large tropospheric errors (approximately 300 ppm uncorrected) experienced by terrestrial signals at these ranges.
Transmit and receive antennas that provide both adequate gain and multipath mitigation for an aircraft flight scenario.
The Advanced Autonomous Waterborne Applications Initiative (AAWA) published a white paper in June as part of presentations at the Autonomous Ship Technology Symposium 2016 in Amsterdam. The white paper outlines the Project’s vision of how remote and autonomous shipping will become a reality.
Oskar Levander, Rolls-Royce vice president of Innovation – Marine, said, “This is happening. It’s not if, it’s when. The technologies needed to make remote and autonomous ships a reality exist. The AAWA project is testing sensor arrays in a range of operating and climatic conditions in Finland and has created a simulated autonomous ship control system which allows the behaviour of the complete communication system to be explored. We will see a remote controlled ship in commercial use by the end of the decade.”
The AAWA white paper explores the research carried out to date on the business case for autonomous applications, the safety and security implications of designing and operating remotely operated ships, the legal and regulatory dimensions and the existence and readiness of a supplier network to deliver commercially applicable products in the short to medium term.
Positioning Technologies. The proposed system draws on a range of sensors (see Figure 1) including GPS, inertial, lidar, cameras, short-range radars, and electronic charts. “When combined witha global or local positioning reference such as GNSS, and with wind sensors and inertial measurement units, the ship is able to keep its position even in rough weather conditions,” states the report. “The main question is therefore not whether the implementation of autonomous ship navigation is technically possible, but what is the combination of technologies and methods that provides the level of performance and reliability that is required for practical operation of large vessels, and at a reasonable cost.”
The white paper draws on a wide range of expertise from academic researchers at some of Finland’s leading universities. Industry input has been provided by leading members of the maritime cluster including Rolls-Royce, Brighthouse NAPA, Deltamarin, DNV GL and Inmarsat.
The project also has the support of shipowners and operators. The tests of sensor arrays are being carried out aboard Finferries 65-metrer double ended ferry, the Stella, which operates between Korpo and Houtskär. ESL Shipping Ltd is helping explore the implications of remote and autonomous ships for the short sea cargo sector.
Iran Reiterates Loran Effort
Researchers at Iran’s Malek-Ashtar University have developed a 1-megawatt transmitter with half-cycle technology for a national project announced as a replacement for GPS, which is currently employed for all positioning, navigation and timing services across the country. Given the lack of control on the GPS’s accuracy and quality and a possible outage of the system in critical conditions, the country’s defense ministry has set out to develop a local positioning system (LPS) for positioning and timing.
Experts at the U.S.-based Resilient PNT Foundation say the description of the system make it appear to be a variant of Loran, probably similar to those operated in Russia and China. If it is such a Loran variant and if it complies with international standards, it should complement Saudi Arabia’s Loran signals in the Persian Gulf, they said.
Iran will establish five stations with powerful transmitters in appropriate locations to provide navigation, positioning and timing services in compliance with international standards, according to the country’s defense minister.
Iran made a similar announcement about a land-based navigation system in December 2013. The country’s military experts and technicians have reportedly logged significant progress in manufacturing a broad range of indigenous equipment.
U.S. eLoran August demonstration
The Wildwood, New Jersey, eLoran transmitter will continuously broadcast from July 29 through 12 p.m. Eastern time on Aug.15. Wildwood will broadcast as 8970 Master and Secondary most of the time but occasionally may operate at other rates.
Three recent publications offer a range of perspectives on GNSS technology, the accompanying industry and its effects on the world we live in. They are rather like surveying the topic through three types of looking glass: a mirror, a microscope and a telescope. I recommend them all.
From the first listed below (Misra), you may not learn much new about GPS or GNSS, but you’ll experience something like looking at your reflection or reading an encyclopedia entry about yourself. You’ll get a view of of the GPS ecology in this case, as a broad and curious public might. And that is in itself a learning experience. “O wad some Power the giftie gie us / To see oursels as ithers see us!” — Robert Burns. Read it yourself before giving it to someone you know, of almost any age but probably high school or older, who is curious but not necessarily scientific.
The second book, by Greg Milner, examines the technology and its impact much more closely and at much greater length. With a few dashes of history and generous helpings of current events, it makes the point that GPS is not only changing our lives, but our minds. That can be a scary thought. The book lays out a very rich and fascinating tapestry of interwoven trends, personalities, anecdotes and conjectures. Again, read it yourself before giving it to anyone who …
The third publication cited here, a white paper by Rolls Royce and colleague companies, is an online resource showing just where the world is headed. It treats only one realm, marine shipping, but it lays out a convincing vision of a future shaped and directed by PNT that can easily be overlaid onto many other forms of transportation and commerce. U.S. Transportation Secretary Anthony Foxx said it recently: autonomous vehicles are coming, whether the world is “ready or not.”
GPS for Everyone: You Are Here
by Pratap Misra
Ganga-Jamuna Press (available on Amazon)
By the co-author of one of the core technical references on GPS and a graduate-level engineering text (Global Positioning System: Signals, Measurements, and Performance, ), this large-format, large-print volume takes a beginner’s view. Although Misra says at two junctures, “we learned to solve [such] equations in high school algebra” and “you may remember from calculus,” no math is necessary to take in the overall view and basic facts of satellite navigation concepts. As the author states, the only prerequisite for this book is curiosity.
With chapters on Nuts and Bolts, Signals, Math, Relativity, a Tool of Science, Smart Bombs and more, this primer gives a comprehensive overview of just about everything the general user could well afford to know about GPS. The one shortcoming from a public information point of view is that many of the wide-ranging applications and market sectors are given short shrift. The importance of precise timing and GPS’ role in critical infrastructure get two paragraphs. A somewhat pejorative chapter on other GNSS labels them all “wannabes” and makes the surprising assertion that “when Putin goes, so could GLONASS.”
Pinpoint: How GPS Is Changing Technology, Culture, and Our Minds
by Greg Milner
W.W. Norton & Co.
GPS marks yet another rite of passage with the publication of Pinpoint: a full-length journalistic investigation of its development, personalities, and societal impact, with a diverting assortment of side stories and philosophical illuminations. A technology can be said to have arrived when it receives this manner of broad-market, though rigorous, intelligent, probing treatment. Never mind that every such technology truly arrived long before their books were written.
This is not a book to give to friends and relations who ask you “How the heck does GPS work?” (For that, see Pratap Misra’s book.) It does spend a bit of time on that subject, a very little bit. Neither is it a history of GPS. Author Greg Milner spends a bit more time on that topic, and his direct sources are impeccable. The major portion of the book is devoted to “contemporary history,” if there is such a thing: the sprawling tentacle-like growth of GPS into many industries and aspects of modern life.
Milner does not chronicle every one or even a plurality of these diverse fields. One gets the feeling he pretty much followed his journalistic nose into whatever interested him. Sections explore early receiver development, electrical power, financial markets, tracking (both personal and fleet), agriculture with a focus on the sugar beet, auto navigation, and a few more. Throughout, Milner pushes forward anecdotes — personal recollection of many, many diverse contributors and benefitees, or in a few cases, victims. One chapter bears the title “Death by GPS.”
He takes long, looping sidetrips that are always interesting, far though they may wander. The most notable case is that of Polynesian cross-Pacific navigation, a mental construct called etak, which takes up, at length, the first chapter of the book. We become aware that possibly what interests Milner most is navigation as a state of mind. He attempts to tie it all together at the end; it doesn’t quite work, but the many questions he raises along the way are certainly worth pondering.
Two examples, only pages apart. In an investigation of the legality and Constitutional issues of tracking and surveillance by law enforcement, he states: “GPS provides the possibility of omniscience, unlike any previous technology. There is nothing ‘natural’ about using GPS to keep a continuous inventory of the world’s moving parts. It reflects a choice, a conscious application of a neutral technology . . . GPS itself is a blank slate onto which we project our desires.”
And in a section on marketing: “Stickiness, a term online marketers apply to websites that encourage repeat visits, could also describe how GPS lets us ‘build situational contexts around things and people to create new meanings, associations and stickiness of disparate data. The simplest example is when we use a program like Google Maps to learn about our location, a sticky query that draws in satellite mapping, ground-level photography, and business information.”
Remote and Autonomous Ships: The Next Steps Available online from Rolls Royce and the AAWA
The Advanced Autonomous Waterborne Applications Initiative (AAWA) published a white paper in June as part of presentations at the Autonomous Ship Technology Symposium 2016 in Amsterdam. The white paper outlines the Project’s vision of how remote and autonomous shipping will become a reality.
Oskar Levander, Rolls-Royce Vice President of Innovation – Marine, said “This is happening. It’s not if, it’s when. The technologies needed to make remote and autonomous ships a reality exist. The AAWA project is testing sensor arrays in a range of operating and climatic conditions in Finland and has created a simulated autonomous ship control system which allows the behaviour of the complete communication system to be explored. We will see a remote controlled ship in commercial use by the end of the decade.”
The AAWA white paper explores the research carried out to date on the business case for autonomous applications, the safety and security implications of designing and operating remotely operated ships, the legal and regulatory dimensions and the existence and readiness of a supplier network to deliver commercially applicable products in the short to medium term.
Positioning Technologies. The proposed system draws on a range of sensors (see Figure 1) including GPS, inertial, lidar, cameras, short-range radars, and electronic charts. “When combined witha global or local positioning reference such as GNSS, and with wind sensors and inertial measurement units, the ship is able to keep its position even in rough weather conditions,” states the report. “The main question is therefore not whether the implementation of autonomous ship navigation is technically possible, but what is the combination of technologies and methods that provides the level of performance and reliability that is required for practical operation of large vessels, and at a reasonable cost.”
The white paper draws on a wide range of expertise from academic researchers at some of Finland’s leading universities. Industry input has been provided by leading members of the maritime cluster including Rolls-Royce, Brighthouse NAPA, Deltamarin, DNV GL and Inmarsat.
The project also has the support of shipowners and operators. The tests of sensor arrays are being carried out aboard Finferries 65-metre double ended ferry, the Stella, which operates between Korpo and Houtskär. ESL Shipping Ltd is helping explore the implications of remote and autonomous ships for the short sea cargo sector.
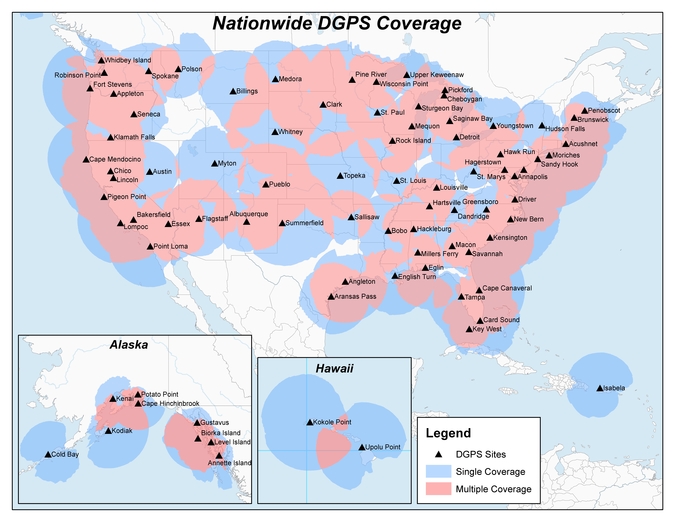
Heartland Corrections Services Now Commercial or WAAS-only
Original NDGPS coverage.
The U.S. Coast Guard, Department of Transportation and Army Corps of Engineers have reduced the number of Nationwide Differential Global Positioning System (NDGPS) sites that will be decommissioned. The course correction keeps a coastal and Mississippi River network of stations largely intact, while discontinuing inland services.
Last year at this time, the agencies sought public comment on a proposed shutdown of 62 of 84 NDGPS sites.
“After a review of the comments received, we have reduced to 37 the number of NDGPS sites to be shut down, nine of which are USCG Maritime sites and 28 of which are DOT inland sites,” the notice reads. “The NDGPS system will remain operational with a total of 46 USCG and USACE sites available to users in the maritime and coastal regions.”
Graphic depicting NDGPS coverage after site reductions. (U.S. Coast Guard)
Public use of NDGPS, never robust, has declined in large part due to limited availability of DGPS receivers. Many users and applications, particularly in precision agriculture, have shifted to commercially provided services or Wide Area Augmentation System (WAAS) corrections instead.
NDGPS coverage is maintained in major maritime ports and waterways. See www.federalregister.gov for a list of sites to be decommissioned. Termination of the broadcast signal is scheduled to occur by Aug. 5.
OCX Deep Dive Finds Progress, Need for Funds
The Pentagon seeks $39.2 million from Congress to speed the next-generation GPS ground control system (OCX) towards completion. Without the infusion, OCX would be delayed an additional four months and cost $90 million more to complete, the Pentagon said.
The embattled OCX showed progress in its July 7 quarterly review, according to an Air Force statement. DOD officials and Lt. Gen. Samuel Greaves, Space and Missile Systems Center commander, concluded Raytheon has made progress implementing critical changes.
On June 30, OCX exceeded baseline cost estimates by at least 25 percent, triggering a Nunn-McCurdy breach and potentially halting all work. Further OCX review will wind up in October. The Pentagon announced in 2015 that it was delaying initial OCX operations for the ground system until July 2021.
GPS III satellites. which may first launch in 2017, cannot use their full capabilities with the current ground control system, but the Air Force plans to use a retrofit to work with the GPS III designs until OCX is operational. See gpsworld.com/updatesyndrome for more details.
Galileo and the Brexit Effect
Tension Grows over the Public Regulated Service
By Tim Reynolds, European editor
UK involvement in the European Space Agency (ESA) should be unaffected by Brexit — the UK leavetaking, as yet undetermined in its details, from the European Union. ESA is a separate institution from the EU. However, one could argue that non-EU-membership might diminish the UK voice and could require a higher financial contribution.
Bids for the next Galileo satellite purchase contracts were due in mid-July, and the European Commission indicated that it will consider them purely on commercial terms. Airbus Defence and Space and Thales Alenia Space were expected to bid, as was the incumbent supplier of the first 22 satellites, OHB SE of Bremen, Germany, with Surrey Satellite Technology Ltd. (SSTL) of Britain as OHB’s satellite payload developer.
The EU has historically been averse to non-EU companies taking major roles in Galileo, and the immediate question is whether the EC could accept an SSTL-built payload that would not be launched until after Britain’s exit is complete.
Paul Verhoef, ESA’s director of navigation, said he will manage the competition as if Brexit had not occurred, with no discrimination against British bidders. Marco R. Fuchs, chief executive of OHB, said OHB would continue the front-line role for SSTL.
Britain could negotiate a security similar treaty similar to one reached by Norway and the EU, that could become effective on the date of Britain’s departure.
If I were a betting man, I’d still wager the house on the incumbent consortium winning the contract to provide the remaining satellites required to provide a sustainable, 24/7 operational constellation for first-generation Galileo. There would, in my opinion, be an unwarranted technical risk in doing anything else.
However, for the next generation it is open season, of course.
PRS at Risk. The real worry must be for the Public Regulated Service (PRS). This is the unique feature of Galileo that is of great interest to civil and military authorities in Europe and beyond, due to its more robust encrypted signal and its potential anti-jamming and spoofing characteristics. Currently, PRS will only be available to EU Member States. However, other countries, including the U.S. and Norway, have indicated that they would love to be able to use it as well. No final decision on this has yet been made.
The loss of the automatic right to access PRS would be damaging to the UK, and potentially to the full Galileo deployment timetable, as the country is currently host to the back-up Galileo Security Monitoring Centre (GSMC) — an essential part of PRS infrastructure — and I cannot see any part of the PRS infrastructure being left in a non-member state. If the centre must be relocated, then deployment of the full service could be delayed.
In addition, UK involvement in research and innovation activities around PRS may be curtailed, even if other work on Galileo projects is not.
UK a PRS Leader. The UK has been a leader in developing PRS applications. Nottingham Scientific Limited (NSL) recently demonstrated cloud-based PRS applications including implementation of PRS authentication for an offender tag, done using live Galileo (and GPS) signals. The demonstration provided real-time authentication flag generation, release and delivery to users. A second demo used cloud-based PRS in a proof-of-concept remote, unattended timing station where the primary user requirement was 100-percent confidence for the validity of signal. A third demonstration illustrated the use of cloud-based PRS on a drone.
Dual-Use Debate
PRS was also a major talking point at the European Space Solution event in The Hague in May. A panel on Space and Security noted that despite the fact that Galileo is marketed as a civil controlled GNSS, “dual use” is becoming a potentially divisive area for debate.
Rini Goos from the European Defence Agency (EDA) said that the EU needed space systems to be able to “intervene successfully,” and that space strategy needed to support Member State defence capabilities. This meant that the next generation of EU space systems must have dual-use capability. NATO is entrusted with external defence of the EU, but the commission also needs to be able to provide defence, not just consume it, he concluded.
The current chairman of the Galileo Security Accreditation Board is a UK citizen, Jeremy Blyth. He said: “Space and security, security and space. Whichever way we say it, what is clear is that the two are inextricably linked together.” He believes that to ensure security, it must be “designed in from the beginning.” Security is an enabler, rather than a barrier, he claimed.
He also believes that PRS gives the EU a real and competitive edge in secure positioning.
However, he indicated that there is a need to think deeply and have a rational debate about dual-use systems and, in particular, about the interface between civil and military use.
Clearly, there is a growing tension with regard to overtly military use of Galileo both now and in future generations of the system. Although a largely philosophical debate, given who in reality will be controlling and using PRS within many Member States, many European and national policy makers will want to retain the “purity” of Galileo as a global positioning system under fully civilian control.
PRS Workshop
Security was also a key feature of the PRS workshop organised by the Netherlands EU Presidency toward the end of European Space Solutions. Ger Nieuwpoort, director of the Netherlands Space Office (NSO), reminded the audience that “For civil authorities, PRS provides the same level of security for Member States as the military in GPS.”
Bart Banning of the Netherlands Institute of Navigation asked “How will we use PRS?’” In terms of its use for protecting critical infrastructure, what if the owner of the infrastructure was a private company? Should it be granted access to PRS or have to make do with the Galileo Commercial Service, a.k.a. PRS-lite?
He also pointed out that PRS was no more protected against jamming than any other GNSS. And, currently, it was “not good for in-building, underground or underwater.”
He thought PRS could be a great time provider, but probably also needs ground transmission, possibly via legacy radio towers. However, he saw the “killer app” for PRS being asset tracking, such as for diamonds, VIPs or prisoners. He also agreed that for many EU countries, the ministry of defence will be overseeing PRS services. “PRS is a good and unique addition to GNSS — but not the answer to all our needs.”
Something’s missing from the summer lineup of blockbuster movies, the disasters, apocalypses, invasions and superhero dust-ups that we’ve come to rely on for worldview. And try as it might, the U.S. presidential campaign just can’t fill the gap. So I flew down to Hollywood and raised $617 million in a fast set of power lunches. By lucky coincidence, several favorite actors were available. We did a quick wrap, and the film’s now slated for late-summer release. The special effects are, if I may say so, spectacular. Here’s the preview for “The Night GPS Failed.”
Matt Damon(as Mr. Suburban America, entering front door): Honey? I couldn’t get any money. The ATM’s on the fritz. Lake Bell(off-screen): Are you —ing kidding me?! I need cash right now! (enters carrying cell phone and credit card) The delivery service won’t take my credit card, and I can’t get customer support because the phone doesn’t work! You’ll have to drive to the store. Damon: I don’t know. Pretty dangerous out there. Traffic lights aren’t working. Bell: What is going on? I need money! (throws cell phone). Damon(ducks and shrugs): What do you want me to do, write our Congressman?
Don Cheadle(on short-wave radio, seated at control panel in room of huge display screens): The grid’s down! (stands and turns to each screen in turn). Cincinnati, Chicago, Tulsa, San Diego, they’re all down! (repeatedly bangs control panel buttons with radio.) ——!! Everything’s down! The whole damn country!
Patricia Clarkson(as U.S. President): I’m told it will take 30 days to fully restore the national power grid and financial markets. Colonel, what has happened to the constellation? J.K. Simmons(as Air Force Space Command chief scientist): Ma’am, we’re not sure yet. Solar particle damage or a bad upload, probably not, but not ruled out. We suspect widespread jamming. It could be mixed with spoofing. Albert Finney(as Chairman of the Joint Chiefs of Staff): Heh, heh. At least the Russkies aren’t doing any better. The Chinese and Europeans are having trouble, too. Military security is not at risk. We don’t think. Clarkson: What’s your contingency plan, General? Finney(spreads his arms): We have one-tenth of a backup system almost halfway built. Funding is an issue . . . Clarkson: Funding my ass! The whole global economy just went to hell in a handbasket, General! I don’t have any money! (throws Red Telephone). Finney(ducks and shrugs): What do you want me to do, write my Congressman?
Bob Dylan(singing on soundtrack): That long black cloud is comin’ down . . .
Based on a true story: “What Happens If GPS Fails,” by Dan Glass, The Atlantic magazine, June 2016.
 As off-the-shelf unmanned autonomous systems (UAS) become less expensive, easier to fly, and more adaptable for terrorist or military purposes, U.S. forces will increasingly be challenged by the need to quickly detect and identify such craft, especially in urban areas, where sight lines are limited and many objects may be moving at similar speeds.
As off-the-shelf unmanned autonomous systems (UAS) become less expensive, easier to fly, and more adaptable for terrorist or military purposes, U.S. forces will increasingly be challenged by the need to quickly detect and identify such craft, especially in urban areas, where sight lines are limited and many objects may be moving at similar speeds.