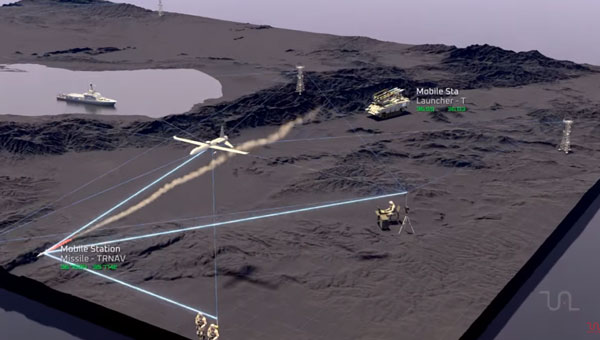
Tualcom has released TRNAV, a terrestrial navigation solution designed to operate with or without GNSS signals.
TRNAV establishes a mesh network of ground stations capable of operating independently from GNSS by using precise pre-established locations or connecting to GNSS when available. The system maintains location accuracy comparable to GNSS by connecting to at least three ground stations. Its highly synchronized timing system ensures a minimal drift of 10ns over a week without GNSS.
The system features a re-synchronization capability that allows the entire network to be updated instantly when just one station reconnects to a GNSS satellite, maintaining high precision across all platforms. Users can integrate mobile stations to enhance network flexibility and range, with the potential to cover distances up to 250km under ideal conditions.
TRNAV also offers a high-bandwidth communication channel for various data types, which offers extensive communication capabilities within the established network. The system employs AES-256 encryption and advanced waveform technologies, including DSSS/FHSS for robust and secure operations even in challenging environments.
As GNSS integrity and availability face increasing threats, TRNAV provides a reliable and resilient alternative for assured positioning, navigation and timing (PNT). Whether in defense, emergency response, or critical infrastructure, TRNAV’s adaptable architecture offers seamless and secure navigation and communication.
GNSS researchers presented hundreds of papers at the 2023 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 11-15, 2023, in Denver, Colorado, and virtually.
The following four papers focused on ways to combat GNSS jamming and spoofing. The papers are available at bit.ly/3UMAS13.
GPS World will be attending this year’s ION conference in Baltimore, Maryland on Sept. 16-20.
Photo: flashfilm / The Image Bank / Getty Images
Fault free integrity of urban driverless vehicles
For positioning in urban environments, systems can be integrated with an inertial navigation system (INS) to help provide continuous navigation through GNSS signal outages. Besides GNSS, another approach for positioning in urban environments is feature-matching. For example, light detection and ranging (lidar) can measure distances and angles for environmental features, such as local landmarks, which can then be associated with known feature locations stored in an onboard database.
This paper investigates how GNSS and INS, when augmented by lidar ranging from local landmarks, can offer safe navigation through a real-world urban environment under fault-free assumptions to achieve 100% availability of fault-free integrity, with requirements corresponding to maximum standard deviations between 0.05 m and
0.1 m in both lateral and longitudinal directions. The team determined which system elements and parameters are the most critical to urban navigation performance, including individual INS noise parameter specifications, average vehicle speed, kinematic constraints, landmark density, integrity requirements and the effects of velocity updates.
The team simulated GNSS availability along a 9 km urban transect in downtown Chicago. They considered multi-sensor integrated navigation architectures consisting of INS, ZUPT, GNSS, lidar, WSSs, and NHL and HL kinematic constraints to improve navigation availability. The simulation involved developed measurement models and a tightly coupled INS/multi-sensor integration scheme using an extended Kalman filter (EKF).
The results revealed that the accelerometer and gyroscope random walks contribute to the total position error considerably more than the accelerometer and gyroscope drift for the driverless vehicle application, especially when the vehicle is moving at low speeds. Intentional vehicle stops with ZUPT inputs mitigate the error propagation but increase drive time. Velocity updates from WSSs can partially calibrate along-track position errors but do not completely reset the INS drifting position errors. Position reference updates are required to handle the concentrated succession of GNSS-denied conditions in the Chicago transect.
Kana Nagai, Matthew Spenko, Ron Henderson and Boris Pervan;“Fault-free integrity of urban driverless vehicle navigation with multi-sensor integration: A case study in downtown Chicago.”
3D vision-aided GNSS
In this work, researchers aim to solve the major problem of GNSS/RTK positioning for autonomous systems through a deep exploration of the relationship between GNSS satellite measurements and visual landmarks in urban canyons. A 3D vision-aided method was proposed to improve GNSS real-time kinematic (RTK) positioning. The effectiveness was verified through several challenging data sets collected in urban canyons of Hong Kong using low-cost automobile-level GNSS receivers together with an automobile visual/inertial sensor suite.
To mitigate the impact of reflected non-line-of-sight (NLOS) reception, a sky-pointing camera with a deep neural network was employed to exclude these measurements. However, NLOS exclusion results in distorted satellite geometry. To fill this gap, complementarity between the low-lying visual landmarks and the high-elevation satellite measurements was explored to improve the geometric constraints. Specifically, inertial measurement units (IMUs), visual landmarks captured by a forward-looking camera, and healthy GNSS measurements were tightly integrated to estimate the GNSS-RTK float solution. The integer ambiguities and the fixed GNSS-RTK solution were then resolved. The effectiveness of the proposed method was verified using several data sets collected in urban canyons in Hong Kong.
The research indicated that GNSS-RTK promises potential solutions that may provide accurate, cost-effective, and drift-free positioning services for autonomous systems with specific navigation requirements. Unfortunately, the performance of the GNSS-RTK is significantly challenged in urban canyons due to the poor quality of GNSS measurements and satellite geometric distributions caused by signal blockage and reflections from surrounding buildings.
Weisong Wen, Xiwei Bai, and Li-Ta Hsu; “3D vision aided GNSS real-time kinematic positioning for autonomous systems in urban canyons.”
Low-cost inertial aids for GNSS
The rise of connected and automated vehicles has created a need for robust globally referenced positioning with increasing accuracy. Carrier-phase differential GNSS (CDGNSS) — a real-time variant for mobile platforms commonly known as real-time kinematic (RTK) GNSS — is a centimeter-accurate positioning technique that differences a receiver’s GNSS observables with those from a nearby fixed reference station to eliminate most sources of measurement error.
In this paper, researchers expand the navigation filter component of the CDGNSS system by tightly coupling with an inertial sensor and with vehicle dynamics constraints, and by incorporating measurements from multiple vehicle-mounted GNSS antennas. It also develops a novel robust estimation technique to mitigate the effects of multipath and allow for graceful recovery from incorrect integer fixes.
The estimator was evaluated using the publicly available TEX-CUP urban positioning data set, yielding a 96.6% and 97.5% integer fix availability, and a 12 cm and 10 cm overall (fix and float) 95th-percentile horizontal positioning error with a consumer-grade and industrial-grade inertial sensor, respectively, over more than two hours of driving in the urban core of Austin, Texas.
A performance sensitivity analysis showed that the false-fix detection and recovery scheme is key to achieving an acceptably low false integer fixing rate of 0.3% and 0.4%, respectively. Having a second vehicle-mounted GNSS antenna significantly increased integer-fix availability, decreased false-fix rate, and improved both root-mean-square and 95th-percentile positioning performance as compared to a single-baseline CDGNSS configuration.
James E. Yoder and Todd E. Humphreys; “Low-cost inertial aiding for deep-urban tightly coupled multi-antenna precise GNSS.”
Benchmarking urban navigation algorithms
In this work, to facilitate the research and development of reliable and precise positioning methods using multiple sensors in urban canyons, the research team built a multisensory dataset, UrbanNav, collected in diverse, challenging urban scenarios in Hong Kong. The dataset provided multi-sensor data, including data from multi-frequency GNSS receivers, an IMU, multiple light detection and ranging (lidar) units and cameras.
Meanwhile, the ground truth of the positioning — with centimeter-level accuracy — is postprocessed by commercial software from NovAtel using an integrated GNSS real-time kinematic and fiber optics gyroscope inertial system.
Detailed presentations are provided for sensor systems, spatial and temporal calibration, data formats, and scenario descriptions. Also, the benchmark performance of several existing positioning methods is included as a baseline.
Based on the evaluations, the team concluded that GNSS can provide satisfactory results in a middle-class urban canyon if an appropriate receiver and algorithms are applied. Both visual and lidar odometry are satisfactory in deep urban canyons, whereas tunnels are still a major challenge. Multisensory integration with the aid of an IMU is a promising solution for achieving seamless positioning in cities.
Li-Ta Hsu, Feng Huang, Hoi-Fung Ng, Guohao Zhang, Yihan Zhong, Xiwei Bai, and Weisong Wen; “Hong Kong UrbanNav: An open-source multisensory dataset for benchmarking urban navigation algorithms.”
Provectus HX2: Vehicle example for defense deployment testing of WaveSense.
GPR Ground Positioning Radar, a producer of ground-penetrating radar technology for autonomous vehicle localization, has entered a strategic collaboration with Rheinmetall Provectus, a provider of autonomous navigation solutions.
Under the collaboration, GPR will integrate its WaveSense localization system into Rheinmetall Provectus’ autonomous platforms, enhancing positioning and navigation capabilities in GNSS-denied environments. The integration seeks to enable new capabilities such as beyond line of sight (BLOS) and GNSS-denied leader-follower operations.
The partnership follows a successful proof of concept (PoC) conducted in rugged terrains in Ontario, Canada, during Q3 and Q4 of 2023. The PoC demonstrated WaveSense technology in GNSS-denied environments, showcasing its potential to improve autonomous navigation in challenging conditions. Both companies have invested significant resources to develop a robust integration of the WaveSense system, ensuring it is ready for deployment.
Iridium Communications has expanded the commercial availability of its Satellite Time and Location (STL) service to parts of Europe and the Asia Pacific. This expansion is driven by increasing demand and aims to provide an alternative positioning, navigation and timing (PNT) solution to protect critical infrastructure against GPS and Galileo spoofing and jamming.
The Iridium STL service, capable of operating globally, is designed to ensure the fidelity of timing systems with a signal 1,000 times more powerful than GPS. This makes it particularly suited for indoor use without the need for rooftop antennas, offering a secure and cost-effective solution for sectors such as transportation, energy grids, data centers, telecommunications networks and financial services.
The expansion follows a significant rise in GPS jamming and spoofing activities in Europe and parts of Asia, posing serious threats to critical infrastructure. The newly available STL service is designed to help safeguard essential systems and improve operational security and efficiency.
The STL solutions are designed to be small, cost-effective and easy to install. These solutions can be integrated into existing GNSS-reliant systems or used as stand-alone units.
With the expanded authorization, Iridium STL can now be purchased by companies in North America, parts of Europe and the Asia Pacific region. The company plans to continue scaling and training sales and support staff to further extend the service’s global reach.
Per Vices has released Calamine, its widest tuning range software-defined radio (SDR). Calamine can be integrated into mission-critical systems for the defense, GNSS, communications and test and measurement markets.
The SDR builds on the Per Vices existing IP to offer a tuning range from near DC to 40 GHz with four independent receiver radio chains, each offering 300 MSPS sampling bandwidth.
The release will offer capabilities extending other SDR systems for government, defense and intelligence communities and civil users with direct applications for radar systems, signals intelligence, spectrum monitoring and satellite communications systems.
Per Vices products aim to provide hardware and software solutions to address the growing need for high channel count, wide tuning range and high bandwidth SDRs. The company’s SDRs support various applications within the defense, civil, aerospace, medical, telecommunications, low latency networks, GNSS, radar, test and measurement, spectrum monitoring and broadcasting and wireless management industries.
The U.S. Department of Transportation (DOT) awarded nine contracts for its Complementary Positioning, Navigation and Timing (CPNT) Action Plan.
The DOT’s CPNT Action Plan was issued in September 2023. The Action Plan aims to promote the use of CPNT services in the nation’s transportation systems and other critical infrastructure sectors. It provides a comprehensive roadmap to ensure the safety, security and efficiency of critical infrastructure through the adoption of CPNT technologies.
Also, in February 2024, the DOT, through the Volpe National Transportation Systems Center, issued a solicitation for proposals for the testing, evaluation and performance monitoring of positioning, navigation and timing (PNT) safety systems and critical infrastructure sectors.
According to SAM.gov, the companies granted contracts are:
Carahsoft Technology
Locata
Hoptroff
Microsemi Frequency and Time
NAL Research
NextNav
Parsons Government Services
Safran Trusted 4D
Tern AI
Through these contracts, the DOT aims to identify and support CPNT technologies that can ensure the reliability and security of critical PNT services, mitigating the risk of disruption and enhancing national resilience. The proposals demonstrate technological readiness and effectiveness. They also contribute to a collaborative effort to safeguard essential infrastructure against emerging threats to PNT services.
Inertial Labs has launched the INS-FI, a GPS-aided inertial navigation system (INS) designed to improve performance and reliability for land, marine and aerial applications.
INS-FI is built with tactical-grade fiber optic gyroscope (FOG) technology and an IP67 rating, indicating its robustness and resistance to electromagnetic and environmental interference. This system integrates an inertial measurement unit (IMU) that combines fiber optic gyroscopes and MEMS accelerometers, along with an all-constellations GNSS receiver supporting multiple bands.
It offers horizontal and vertical positioning with approximately 0.1% error of distance traveled for land applications and a drift of five nautical miles per hour for aerospace applications without GNSS signal. INS-FI is fully compatible with Inertial Labs’ Air Data Computer (ADC), visual inertial navigation systems (VINS) and stand-alone magnetic compass (SAMC).
The INS-FI incorporates Inertial Labs’ sensor fusion filter, navigation and guidance algorithms, and calibration software for optimal performance and reliability. This new system aims to provide precise horizontal and vertical positions, velocity, and absolute orientation (heading, pitch, and roll) for any mounted device, maintaining high accuracy for both stationary and dynamic applications.
Wingtra has released its WingtraCLOUD software, designed to simplify data collection and streamline the onboarding of surveyors and pilots.
WingtraCLOUD offers a user-friendly flight planning experience, plus time-saving features including site-based file organization, advanced 3D planning, coordinate system by sites and improved connectivity via cloud syncing in a single environment.
It aims to simplify and streamline site setup and team collaboration. WingtraCLOUD’s features simplify and accelerate planning and introduce a new level of transparency among stakeholders with enhanced wireless functionality. Users can now provide insights to regional and global site managers across projects.
WingtraCLOUD allows users to maximize Wingtra aerial data and services, offering UAV program scaling and business advantages across a variety of industries.
Spirent has implemented Xona Space Systems’ PULSAR production signals for seamless integration into the existing SimXona product line. The PULSAR X1 production signal implementation has passed a diligent Xona certification and the PULSAR X5 signal verification process is currently underway. It is expected to pass certification during the summer of 2024. Spirent is now accepting orders for SimXona with production signals capability.
Xona is developing PULSAR, a high-performance positioning, navigation and timing (PNT) service built on a backbone of low-Earth orbit (LEO) small satellites. Xona’s smallsat signals will improve PNT resilience and accuracy by augmenting GNSS while operating with an independent navigation and timing system architecture. Xona is fully funded to launch its production class satellite, the In-Orbit Validation mission, in 2025.
Spirent is the leading provider of PNT test solutions and recently launched a sixth-generation simulation system, PNT X. Designed for navigation warfare (NAVWAR) testing, PNT X is an all-in-one solution with a native implementation of SimXona.
Adtran has released two optical cesium atomic clocks, the OSA 3300 Super High-Performance (OSA 3300 SHP) and the OSA 3350 Super Enhanced Primary Reference Clock+ (OSA 3350 SePRC+). The devices use optical pumping technology to meet evolving demands across applications from scientific research to critical positioning, navigation and timing (PNT) infrastructure.
The OSA 3300 SHP offers stability and accuracy, making it a valuable tool for metrology institutes and scientific research facilities. The OSA 3350 SePRC+ is specifically designed to enhance holdover capabilities for PNT services. It maintains 100 days of 100-nanosecond precision, providing continuous and accurate timing even in environments where GNSS is compromised or unavailable. This makes it a crucial component for ensuring the integrity of mission-critical networks and supporting vital infrastructure and defense operations with reliable backup timing.
“In an era marked by rising global tensions and heightened risks of state-sponsored interference in satellite communications, our latest innovation has arrived at a pivotal moment. It will greatly enhance our capacity to address the demand for secure and reliable network timing around the world,” said Gil Biran, GM of Oscilloquartz, Adtran.
Point One Navigation has released a new “Tags” feature for its precise positioning Polaris network.
The Tagging feature aims to simplify building and using positioning networks and systems for a wide range of applications including surveying, construction, fleet management, AgTech, robotic devices, UAVs and autonomous vehicles.
With this upgrade, users can access streamlined searchability, precisely defined analytics and the ability to control devices at scale. According to Mark Wilkerson, Point One Navigation’s Product Manager, “The most powerful aspect of our tagging system is that it fundamentally changes the way customers can integrate their systems with ours.”
Users can now work with P1’s API as if it were one of their native applications. The tagging features allow users to query data in the system using their native IDs, model numbers, regions and more.
It now supports real-time operations with Point One’s GraphQL subscriptions API and features a device search UI in the web app. This allows users to filter and query their devices by tags, connection status or attributes. By using the new search feature, support teams can quickly pull up all active devices and display them on a map in real time. Changes made in either the web app or the API update in real-time.
The European Space Agency (ESA) has upgraded the ground segment of the Galileo satellite navigation system, without any disruption to its users. This update enhances the Galileo Control Segment responsible for managing the constellation of orbiting satellites.
The upgrade involved a series of improvements to both the operational control centers and the extensive network of ground stations. These enhancements are designed to boost the robustness and reliability of the Galileo system, which is crucial to critical applications such as navigation, timing services and emergency response.
With Galileo’s First Generation close to completion, the ground segment required an upgrade to System Build 2.0 to bring critical enhancements to the system, especially for the roll-out of the Public Regulated Service (PRS), which provides highly accurate and robust encrypted signals for authorized governmental users
With the cooperation of the European Union Space Programme Agency (EUSPA) and key industrial partners, ESA ensured a seamless transition, highlighting the effectiveness of international collaboration in advancing satellite navigation technologies.
Click here to visit the official ESA blog and learn more.