The term “original equipment manufacturer” (OEM) is widely used, yet vaguely described. In general, an OEM product is one that a company creates and sells to be integrated into systems made by other manufacturers.
In the GNSS industry, the purchasers of OEM products typically are manufacturers of products that require precise positioning or navigation capabilities, from precision agriculture, to surveying and mapping, to UAV missions. Often, manufacturers integrate the OEM GNSS receivers with other sensors, such as inertial measurement units (IMUs) and lidar devices.
A large portion of the OEM business goes unnoticed by the end users of the equipment that utilizes OEM components. These components, such as a guidance system, are often hidden from view, due to being housed under a hood or elsewhere deep within the system.
In the following case studies, OEM products complement GNSS in air, land and marine applications. Safran Federal Systems’ INS for land vehicle navigation and Septentrio’s AIM+ anti-jamming and anti-spoofing technology tackle land and air-based defense applications, while an OxTS IMU is used in a coral reef restoration project to accurately record ship motion.
Land vehicle navigation in GNSS-denied environments
Safran Federal Systems
Ground vehicles in defense operations often navigate in challenging environments where traditional GPS signals are contested or unreliable. This includes dense urban areas, heavily forested regions, or any areas where enemies employ electronic warfare to disrupt GPS signals. Having a robust navigation system that can provide both the vehicle’s location in real time as well as its precise orientation and direction/heading is crucial for defense applications. An inertial navigation system (INS) can provide reliable position and heading data for short periods of time or distances without the aid of GPS satellite signals, allowing vehicles to stay on course and maintain awareness of their location.
Precise location and navigation capabilities are essential for mission planning, execution and coordination with other units. Inaccurate navigation can lead to mission failure, unintended engagements, or even friendly fire incidents.

Safran’s Solution

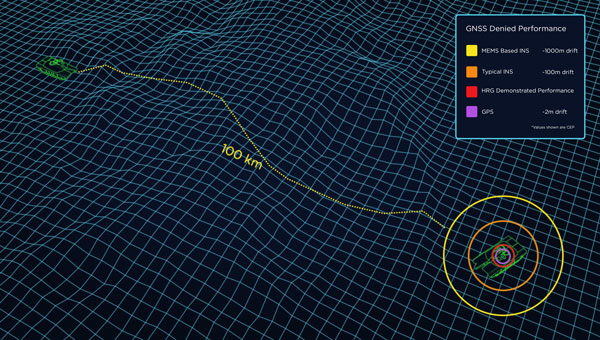
Safran has developed the Geonyx INS, which provides route guidance in GNSS-denied environments. It incorporates hemispherical resonator gyroscope (HRG) technology and does not rely on external satellite signals for navigation and heading. Instead, it uses gyroscopes to detect changes in heading and accelerometers to detect changes in acceleration, then uses those data to calculate the vehicle’s position, orientation and velocity.
The Geonyx will output coordinates of the vehicle’s current location as well as the data on its intended position to the vehicle’s battle management system (BMS). It can maintain an accuracy of a couple of meters after tens of miles of pure inertial navigation.
Geonyx is a combat-proven INS solution for ground vehicles, augmenting battle management systems. It can achieve a heading accuracy as good as 0.5 mils thanks to Safran’s HRG Crystal technology. It has quick and flexible alignment, even in GNSS-denied environments.
Safran is upgrading the Geonyx to incorporate M-Code capability. This enhancement offers a fully integrated solution to tackle the challenges of GPS-denied or spoofing environments, ensuring robust and reliable navigation even in the most demanding conditions.

Resilient GNSS receiver
Septentrio
Around the world, there is an increasing demand for better resilience in positioning, navigation, and timing (PNT) systems. U.S. President Joe Biden has signed an executive order to enhance national resilience through PNT services. Geo-political tensions require a higher level of security for operations in areas of navigational warfare (NAVWAR) under contested GNSS conditions.
In countries such as Finland, companies are seeking reliable receivers that can be connected in a network to identify sources of malicious interference. In numerous GNSS applications, such as reference networks, UAV surveillance, delivery and timing synchronization, the repercussions of PNT degradation or loss can be significant.
Septentrio’s Solution
Septentrio took part in the JammerTest 2023 event organized by the Norwegian government on the remote island of Andøya, where live interference testing was conducted in a controlled environment.
While most of these test events are classified and their results cannot be shared publicly, the JammerTest represents one of the first public events of its kind where the sharing of results is encouraged.
After five days of intensive testing in Norway, Septentrio’s AIM+ anti-jamming and anti-spoofing technology proved to work well under live interference conditions. Test results revealed that under real interference, receiver technology plays a key role, while antenna technology plays a supporting role. By testing the receiver under various types of spoofing attacks, it was shown that the best spoofing protection lies in having multiple anti-spoofing mechanisms working together.
Detecting and Mitigating GNSS Jamming
This test used a “cigarette lighter” jammer, which is commonly available for purchase online. It emits signals with power between 10 dBm and 15 dBm and can disrupt GPS L1 and L2 signals. Other jamming tests involved using jammers with signals 10 million times more powerful than GNSS signals.
Over one day of intensive jamming tests, receivers with integrated AIM+ demonstrated 99.5% positioning availability under various forms of jamming from simple continuous narrow-band interference to the most complex wide-band transmissions.
The Magic is in the Receiver
For mission-critical applications, an anti-jam antenna can help achieve maximum resilience against RF interference. During the JammerTest, three receivers were tested under heavy multi-frequency wideband jamming in combination with antennas of varying sophistication. A receiver with a standard wideband helical antenna that did not have AIM+ anti-jamming technology immediately lost tracking of satellite signals during jamming. A receiver with the same antenna, but with AIM+, continued to track signals and deliver positioning. A receiver with AIM+ coupled with an anti-jam antenna displayed that the drop in signal quality is slightly less than with a standard antenna and the receiver continued to track signals and to deliver positioning.
Tests with various anti-jam antennas showed an interference reduction of about 10 dB. While AIM+ plays a role in positioning availability under jamming, an antenna plays a supporting role and can improve the chances of getting positioning in cases where the jamming is still slightly stronger than the ability of the receiver to mitigate it. While anti-jam antennas can be effective in countering wide-band “white-noise” jamming, they are less effective for other types of jamming.
Accurate and available PNT is key to successful industrial or critical operations in challenging environments. By regularly participating in live events such as the JammerTest, Septentrio anti-jamming and anti-spoofing technology is continuously being tested and improved to withstand the latest interference attacks. This technology also has been confirmed to be effective by users out in the field, who are using Septentrio receivers in places of malicious interference, such as near contested borders.

INS Used for Coral Reef Restoration Project
OxTS
The Reef Restoration and Adaptation Program (RRAP) is an effort to help a significant ecosystem such as the Great Barrier Reef (GBR) survive climate change. Through its Cooling and Shading sub-program, RRAP’s goal is to determine whether localized cloud brightening — a technique that involves spraying droplets of sea salt into clouds to reflect sunlight and cool Earth — and/or fogging could be a temporary solution to alleviate stress on parts of the GBR during hot summer conditions, which might lead to bleaching.
The Ordnance Survey team was tasked with consistently creating precisely georeferenced point clouds that could be utilized for identifying and classifying features. The GBR is a significant source of biogenic volatile organic compounds (BVOCs), which are likely to be impacted by ocean warming in potential climate change scenarios. In turn, these BVOC emissions can influence Earth’s radiation budget by contributing to the creation of secondary organic aerosols and cloud condensation nuclei, ultimately leading to cooling.
Southern Cross University, an RRAP partner, sought an accurate method to record ship motion for this project. The team needed to measure various parameters such as velocity, acceleration, pitch/roll, angle rate, and ship heading. They approached Industrial Measurement Solutions (IMS) and OxTS to assist them in addressing this challenge. To achieve this accurately, they needed to integrate the measurements from their existing sonic anemometer, which records three-dimensional wind velocity, with the measurements from an IMU.
OxTS Takes the Challenge
Correcting wind speed for platform motion requires two high-resolution sensors to record data simultaneously: a sonic anemometer that records three-dimensional wind velocity, and an IMU that records the movement of the platform/ship. The sonic anemometer and the IMU are two very sensitive sensors, and many of the technology challenges the team faced involved setting them up correctly and getting them to work seamlessly together.
Once the project team realized that they needed an IMU to measure the ship/platform motion, one of their collaborators at the time, Airborne Research Australia (ARA), suggested an OxTS xNAV650.
After they had defined the project requirements, Southern Cross University contacted IMS who helped them navigate the commercial process.
xNAV650 is a miniature INS that uses survey-grade dual-frequency GNSS receivers and custom MEMS IMU for centimeter-level position accuracy, precise orientation and true heading. It logs the navigation data on internal storage for downloading and viewing post-mission. It can be used in many applications, such as corridor mapping and precision agriculture.

IMU in Action
The xNAV650’s IMU allowed Southern Cross University to accurately measure the motion of the ship. The IMU was configured to “displace output” to the location of the 3D wind measurement instrument — the sonic anemometer. This allowed the project team to record the movement of the instrument directly, thus avoiding any additional complicated processing steps. Additionally, the IMU was configured to output a 1 pulse per second (PPS) signal via serial connection. This allowed the project team to connect the IMU to the sonic anemometer’s data logger to sync the time between the two instruments. This was vital on such a rapidly moving platform.
Once installed, the xNAV650 device was able to measure ship motion accurately and at high time resolution
(100 Hz), which was complementary to the team’s wind velocity and BVOC measurements. The PPS output option allowed for simultaneous measurement/recording, which would have otherwise needed to be corrected in post-calibration and would likely not have been as accurate.
“We managed to accurately record ship motion for the entire length of our second voyage,” said Liz Deschaseaux, RRAP’s research fellow on BVOC emissions. “The reliability and accuracy of the xNAV650 has had a real impact on our ability to collect meaningful data.”