An exclusive interview with Jaime Jaramillo, Director of Commercial Services, Xona Space Systems. For more exclusive interviews from this cover story, click here.
Space X Launch. (Image: Xona Space Systems)
It has been said that “the only alternative to a GNSS is another GNSS”. Your website’s homepage claims that Xona will be “the next generation of GNSS.” Will it provide all the positioning navigation and timing services that the four existing GNSS provide?
JJ: The answer at a high level is “Yes, it will provide all the services that legacy GNSS provides and more.” Xona is developing a dedicated constellation of PNT satellites in Low Earth Orbit — this allows us to provide PNT signals and service with significant improvements to precision, protection, and power compared to what’s available today. Xona’s service, called PULSAR, is designed to meet a variety of commercial and modern applications that have been seeking performance improvements.
So, the short answer to my question is, “Yes. All of that, and then some.”
JJ: Yes, absolutely. Traditional GNSS constellations provide tremendous value to the world today, though we’ve seen market demand signals for even higher performance PNT and that we intend to deliver on.
How many satellites and orbital planes will the full constellation have?
JJ: The target is approximately 300 satellites. That will include several spares. There will be a diverse set of orbital planes and a combination of polar and inclined orbits.
When all the satellites are up, their locations and broadcast frequencies will be public, right? They will have to be disclosed to various regulatory bodies.
JJ: You hit it on the head. Because we’re in the process of going through regulatory approvals for the full constellation, we can’t talk a lot about our frequencies and a lot of the specifics publicly though this will change over time.
Roughly, when do you expect to achieve initial operational capability (IOC)? And when you expect to achieve full operational capability (FOC)?
Image: Xona Space Systems
JJ: As you can imagine, it is expensive to put up all 300 satellites — we’ll have a three-phase roll-out approach. Our target is to launch our next satellites at the end of 2024. In our first phase, we’re going to offer services beginning in North America and Europe that only require one satellite in view — for timing services and GNSS enhancements. IOC will be achieved in 2025. Then, as we roll out to phase two with more satellites in view, we’ll be able to start to offer positioning services in mid-latitudes. As we move to phase three, the service will provide even higher-performance PNT globally, and the services’ ability to operate independently from GNSS. We also designed the constellation with polar orbits to provide much better coverage in the polar regions which will be an improvement over what GNSS provides today.
With climate change and more traffic through the Arctic, that’s going to become more important.
JJ: Exactly. When we talk to potential customers today, that question comes up.
When do you expect to complete your constellation?
JJ: Our target for full operational capability is 2027.
So, two or three years to fill out the constellation.
JJ: We have basically locked down our signal and system architecture. Now, it’s a matter of building out the ground segment and launching satellites on schedule. There are several factors at play here, but those are the targets that we have today.
Speaking of launch, who will launch your satellites?
JJ: That decision will depend on the satellite manufacturers with which we proceed. But the demo satellite that we have in space was launched last year in May on a SpaceX Falcon 9 rocket.
What is your business model? Will you have different tiers of service? Will your rate structure enable mass adoption?
JJ: We are targeting both mass market applications and high-performance ones. LEO brings many benefits in comparison to MEO in just about every industry to which it can be applied. Our business model supports industries that prefer a lifetime fee, as well as ones that prefer recurring subscriptions. We’ve also designed PULSAR with different performance tiers to support a wide variety of customer needs.
What would be the differentiators between the different tiers?
JJ: The PULSAR base service will include timing and positioning from Xona satellites. We have some in-band capabilities to broadcast additional services, such as GNSS enhancements, enhanced security features, and signal/service integrity. The integrity service will verify that the signal has a certain level of performance thresholds. Critical applications that need certain levels of performance will be able to receive the signal. If it drops below certain performance thresholds, we will flag that to the device so that it knows that, even though it is receiving a signal, it should not continue to use it due to signal degradation.
With legacy GNSS, satellites in MEO broadcast signals to receivers. There’s no need for two-way communication and, anyway, transmitting to the satellites would require too much power. With LEO satellites, however, you need a lot less power from the ground to talk to the satellites. Would two-way communication benefit certain applications?
JJ: The initial service will not have two-way capabilities. However, we are leaving room in the signal and hardware designs to potentially offer that in the future.
Image: Xona Space Systems
Your business model is the exact opposite of the gift from U.S. taxpayers to the world that is GPS.
JJ: Agreed that GPS is one of the greatest gifts US taxpayers have given to the world. While similar in function, GPS and Xona have different mission sets. As a commercial company, we have a mandate to listen to the commercial world’s needs and address them in a cost-effective manner. The world is evolving much faster than current GNSS can improve. This forces commercial industries to design around satnav limitations and use other navigation technologies that may not be as scalable or cost-effective.
Who will build the receivers? Do you expect that “if you build it, they will come”?
JJ: Xona has established relationships with many of the receiver manufacturers out there. What’s publicly announced is that we have a strong relationship with Hexagon | NovAtel. They have been supportive of us for a long time now and are very advanced in their development and support for our signals. Some interesting announcements were made at JNC, with additional simulator and receiver manufacturer partners, with more to come. It’s going to be very exciting.
I assume that, at least for a transitional period of several years, we’re talking about adding Xona to the traditional GNSS on the receivers — just like, many years ago, we went from GPS-only to GPS and GLONASS, and then, more recently, to multifrequency receivers that use all the satellites in view. Would there be any reason, at some point, to have Xona-only receivers?
Image: Xona Space Systems
JJ: We have designed our signals to make it as easy as possible for receiver manufacturers to support them. We designed the signal so that most receivers can support them with just with a firmware upgrade. Many receiver manufacturers ask the same question that you just asked. For certain applications, maybe Xona PULSAR-only makes sense or maybe it’s just GPS and Xona or GPS and some other constellation and Xona. There are initiatives looking at all these scenarios but most of them today are GNSS plus Xona as a complement.
It’s interesting what you said about firmware as opposed to needing new hardware.
JJ: Correct. Given that we’re a startup we want to facilitate that as much as possible. For some of the advanced features — for example, enhanced signal security — the receiver needs more horsepower. So, it depends on the receiver. Some very optimized ASIC types of receivers may not have the horsepower for this.
Of course, that horsepower is increasing anyway…
JJ: Exactly. And there are other techniques, right? For example, some IoT receiver manufacturers are offloading a lot of the processing power to the cloud. So, the device is designed to have some sort of network connection. Then, if it needs to do heavy processing, it can do that in the cloud. That can be done in different ways. For future applications, some receiver manufacturers are looking to potentially add this capability to next generation receivers.
Of course, the cloud introduces some lag…
JJ: Right. It depends on the application. If it’s an IoT device or an asset tracker, maybe it’s not mission-critical. It just depends on the application.
What markets or applications are you targeting first?
JJ: Timing is a big area of focus for us for initial applications. The precision agriculture, construction, and surveying markets are on the cutting edge of GNSS technology and are seeking improvements to their existing capabilities as well. We’re in discussions with players in high-volume markets that see a lot of potential even in the initial PULSAR phases as well.
Will the timing you provide be good enough for cell phone base stations? For television broadcasts? For financial transactions?
Image: Xona Space Systems
JJ: Our patented system architecture will provide better timing accuracy than what GNSS provides today. One of its key pieces is that our satellites are designed to use GNSS signals, inputs from ground stations, and from other Xona satellites via cross-links for timing reference. Satellite clock and ephemeris will be updated very frequently which enables much higher accuracies.
That raises a critical question, especially in the context of complementary PNT: will your satellites have their own atomic clocks or will they rely entirely on GNSS? If the latter, any problem with GNSS would also affect your system.
JJ: This was one of the key points that we kept in mind when we architected the constellation. Each Xona satellite uses timing inputs from a variety of sources (GNSS, ground, and other Xona satellites). If GNSS degrades or is removed entirely, the PULSAR service can continue to operate in this GNSS-independent mode indefinitely. In this scenario, the PULSAR service performance will degrade a bit since the number of quality timing inputs are reduced but can still meet about the same level of performance that GPS provides today.
The devil’s in the details. What kind of frequency standard will be on the satellites? How fast will their time degrade? How long will it remain sufficiently accurate for certain applications?
JJ: I know where you’re going because I come from the timing industry. Since we’re a commercial company, one of the goals of the constellation design was to keep the cost of the satellites themselves as low as possible, so that we can deploy them at a low cost. We will leverage the very high-quality atomic clocks in GNSS satellites and ground stations in which governments have already invested. The type of clock that we use costs much less to keep the satellite cost down. The way to discipline these clocks properly is by updating them on a more frequent basis than traditional atomic clocks. This is done through the many inputs from GNSS, adjacent satellites, and the ground.
If GPS goes down entirely, we’ll have bigger problems. Your system would continue to work and, even if degraded, will be a lot better than nothing. Your architecture, however, leaves room for people to say that we also need ground-based systems.
JJ: That’s a really good point. The idea of having another LEO-based constellation is to take advantage of what can be done in LEO for GNSS. It’s not intended to replace ground-based systems or alternative systems. If you want the most resilient time and position, you need to use a combination of everything. GNSS alone will not give you the best combination. We always like to say that we’re complementing GNSS.
An exclusive interview with Paris Austin, Head of Product – New Technology, Oxford Technical Solutions. For more exclusive interviews from this cover story, click here.
What are your title and role?
I’m the head of product for core technology at OxTS. My role now is focused on R&D innovation. So, the research side, developing prototypes and taking new technology to market effectively. One of the key things we’re examining is GNSS-denied navigation: how we can improve our inertial navigation system via other aiding sources and what other aiding sensors can complement the IMU or inertial measurement unit to give you good navigation in all environments. Use GNSS when it’s good, don’t rely on it when it’s bad or completely absent.
We rely increasingly on GNSS but are also increasingly aware of its weaknesses and vulnerabilities. What do you see as the main challenges?
Excessive reliance on anything leads to people exploiting it, which is where the spoofing, the jamming, and the intentional denial come in. We all rely on technology nowadays to do all our menial tasks; then, if we lose the technology, we don’t have the skills to do the task ourselves and we’re in trouble. Reliance on a mass global scale on GNSS is a good and a bad thing. It is good for technology because costs come down. Access to GNSS data is increasingly easy and devices that use it are increasingly cost-effective. But if your commercial, industrial, or military operations rely too much on that one sensor, they can fall over. That’s where complementary PNT comes in: if you can put your eggs in other baskets, so that you have that resilience or redundancy, then you can continue your operation — be it survey, automotive or industrial — even if GNSS falls or is intermittently unavailable or unavailable for a long period of time.
However, you can fully replace a GNSS only with another GNSS.
You cannot replace GNSS with anything that has all the pros and none of the cons. You could use something like lidar or an IMU to navigate relative to where you started. However, you would not know where you are in the world without reference to a map, which would have been made with respect to GNSS global coordinates. The best thing you can do is use things with GNSS to plug the gaps or rely less on it periodically in the sense of having multiple updates per second and be able to at least start with a global reference, then navigate relative to that for a period of time and then get another global update. Then you can navigate in between either via dead reckoning or local infrastructure that is being referenced with respect to the global frame. That way, you can transition between GNSS and localized aiding without any dropouts in your operation or your functionality without relying on completely clean GNSS data all the time.
As you say, you can’t replace it. If you do claim to be breaking free from GNSS you’re really playing a different game and just describing it in a way that sounds as good as GNSS, but in reality you’re saying, “I can navigate in this building but I don’t know where this building is” until you start saying, “Well, I’ve referenced it with respect to a survey point that used a GNSS survey pole.” At that point, you’re not breaking free from GNSS, you’re just using it differently.
INS-GNSS integration has been around for a long time and the two technologies are natural partners because each one compensates for the other’s weaknesses. What have been some of the key recent developments in that integration?
The addition of new GNSS constellations has helped a lot because you need four satellites for a position or time lock and six satellites to get RTK. What previously were 12 to 14 satellites from GPS and GLONASS visible at any one time have doubled with the addition of Galileo and BeiDou. So, your requirement for six satellites at any one time has become a much more reasonable proposition in terms of maintaining that position lock in the first place. Meanwhile, IMU sensors have been coming down in price. So, you can make a more cost-effective IMU than ever, or you can spend the same and get a much better sensor than you ever could before. Your period between the GNSS updates is also less noisy and you have less random walk and more stability.
With less drift you can also go for longer periods without re-initializing your IMU.
Yeah, exactly. Your dead reckoning period can go longer, while still taking advantage of tight coupling wherein you use the ambiguity area of the IMU to reduce the search area for the satellites. So, a better IMU means that you can use GNSS more readily when you go under a bridge or go through a tunnel. You can lock on to satellites quicker again because of the advancements that have been made with the IMU technology.
What have been some of the key advances in IMU technology in the last five or ten years?
With GNSS receivers, the market has become more competitive, there are now more options than ever before. People being disruptive in the space has allowed us to use lower cost sensors for the same performance or mix and match gyroscopes and accelerometers to get the best IMU complementary level. Previously, you may have had an accelerometer that far outweighed the performance level of the gyroscope. So, you would have very good velocity drift over time. But if you’re heading drifts, you still end up in the wrong place when you haven’t had GNSS for a while.
So, that’s allowed us to pick a much more complementary combination of sensors and producing an IMU that we manufacture and calibrate ourselves, while using off-the-shelf gyroscopes and accelerometers. That allows us to make an IMU that is effectively not bottlenecked in any one major area. I think previously, with IMUs, you took what you could get and some of that technology was further ahead than other. So, it’s a good thing for us because the sensors that we’re getting do not cause single-source bottlenecks and we can achieve higher level of performance than we ever could, without having to significantly increase our prices.
The way we’ve always seen it, either you add features or performance level and maintain the price, because the technology is maturing over time, or you disruptively lower your price with the same technology. On occasion, we have done that in the survey space. That’s where the performance level requirements are far tighter because people are moving from static survey using GNSS, where they’re used to millimeter-level surveys, into the mobile mapping space, where they still rely entirely on RTK GNSS.
However, they also rely on high accuracy heading, pitch, and roll to georeference points from a lidar scan at a distance instead of only exactly where they are. Where new IMU technology has helped us is to get the better heading, pitch, and roll performance for georeferencing as well as reducing the drift while we dead reckon in a GNSS outage.
What is the typical performance of IMU accelerometers and gyros these days?
It boils down to what it gives us in terms of position drift or heading, pitch, and roll drift over 60 seconds. Real-time heading, pitch, and roll is heavily affected by gyroscope performance.
How much more do you have to pay to get that increase in performance?
There are definitely diminishing returns. When you look at some of the Applanix systems that have very good post-processing performance in terms of drift, you’re talking about something like $80,000 for a mobile mapping survey system that is maybe 50% better on roll and pitch in normal conditions, let alone an outage, vs. $30,000 to $40,000 for our top system, which is 0.03 roll and pitch, for example. If you go down to 0.015, you can pay double for the INS. Similarly, if you go the other way, and you go cheaper, you can probably get a .1 degree roll and pitch system for $1,000.
So, it’s a very steep curve. The entry level systems are very disruptively low priced now but given the requirements for certain applications —particularly survey — that .1 degree means that you can never achieve centimeter-level point cloud georeferencing. And that’s where people are still justifying spending $80,000 or more on the INS. They also spend similar levels on their RIEGL lidar scanners and other profilers. So, it’s complementary to the quality of the other sensors. However, it really doesn’t make sense to spend $1,000s on your INS and then $80,000 on your lidar, because you’re going to be bottlenecking the point cloud that you get out of it at the end anyway.
The same goes for autonomous vehicles, where people are now spending sub-$1,000 on their lidar or their camera, and they don’t want to spend $30,000 to $40,000 on their INS for a production level, autonomous vehicle. So, there needs to be that similar complementary pricing for sensors in that space, where you can offer an INS for hundreds of dollars, for example, that performs maybe only a percentage less than INSs do today.
For an autonomous vehicle to stay in lane, it still needs these building blocks to be high accuracy, because they’ve only got 10s of centimeters with which to play. However, they are doing it from the point of view that they don’t care where they are in the global frame at that moment in time to stay in their lane, only where the lane markings are. However, they will care where they are in the global frame when they come to navigate off of a map that someone else has made and they’re looking for features within the map, for such things as traffic signs, stoplights, and things that are out of sight or occluded by traffic, so that they know if they’re approaching them and the camera is just blocked at that time. That’s where the global georeferencing comes in and where GNSS remains critical effectively. Right?
It ranges price-wise. The top-end systems — Applanix and NovAtel — in the open road navigation sense, are not orders of magnitude better but you do end up paying double very quickly. If you look at the datasheet, positioning in open sky conditions is identical between a £1,000 power system and an £80,000 pound system. The differences all come in those drifts specs, or the heading, pitch, and roll specs that are being achieved, because the value really comes from the IMU being used at that point.
Is most of the quality difference between these devices due to better machining, smarter electronics, or improved post-processing?
Any one of them on their own will not get you a good navigation solution. Fundamentally, you can have a good real-time GNSS-only system that will work at a centimeter level if you just use, say, a u-blox receiver, which is less than $100. Adding a low-cost IMU can fill some gaps, but not particularly intelligently and you’ll get jumps and drop-outs or unrecoverable navigation. That’s when the algorithms come in to play in terms of intelligent filtering of bad data and when to fall back on one solution versus the other and when to blend the two.
I was asking specifically within INS. When you’re talking about a $1,000 INS versus an $80,000 INS, how much of the improvement in performance is due to manufacturing, how much of it is due to smart electronics, and how much of it is due to algorithms or post processing?
Most of it is probably down to the raw sensor quality and then the calibration of the sensors. An IMU calibration is important, in terms of compensating for bias and scale factor errors, but also for the misaligned angle of the sensors. So, you need to make sure that your accelerometers and your gyros are all mounted exactly orthogonal to each other. A $1,000 sensor is very unlikely to be calibrated to the same level as an $80,000 one. That’s probably because you’d get 10% more out of calibrating the $1,000 one but you might get three times the performance out of calibrating the $80,000 one. So, you have a lot more to get out of a high-end system in terms of unlocking the potential whereas the low-end sensors are probably already giving 80% to 90% of their potential out of the box, with no calibration at all.
You affect such things as warmup time. A well-calibrated system will already be modeled accurately almost as soon as you power it on. If you don’t calibrate the system, you can still have a Kalman filter or something running in real time that can model the errors live. But it will mean that you won’t be at spec level performance as soon as you power up. When does it matter to you that you get the best data? Is it the instant you power up because you’re navigating an autonomous vehicle out of the parking garage? Or do you have 10 minutes before you need to take the data and use it for anything, and therefore you can take those 10 minutes to model the sensors live?
You might save money on the electronics budget but spend it to pay the driver to do the warm-up procedure. You can reallocate where you spend your money. If you’re rolling out a fleet of 100 vehicles, though, you probably don’t want to have to have 100 drivers that are trained to do a warm-up procedure. So, you would spend the money on the electronics to have an INS that does not require a warm-up. That is an option that you can go with now. If you spend the extra you can get away from the warm-up procedure requirements, because things have been modeled during calibration instead of in real time.
Your website focuses on three areas: automotive, autonomy, and surveying and mapping. Why those and what might be next in terms of markets or end user applications?
Automotive is probably the bread-and-butter part of OxTS. For a long time, automotive users were looking for a test and validation device that could give them their ground truth data to validate onboard vehicle sensors. We were very much the golden truth sensor, making sure that the sensors they were putting into the production vehicles were fit for purpose and safe. So, if they claimed it had autonomous emergency braking, they used our sensor to say how far away it was from the target — for example, a pedestrian — when it made the vehicle stop. Did it break with the appropriate distance between them? They had a unit in each vehicle and got centimeter accuracy between them. That was very easy to do with GNSS. Because on a proving ground for automotive users, they always have RTK.
Now the automotive world is moving into the urban environments and doing more open-road testing. So, the need for complementary PNT is more on their mind than ever. They are looking for a technology from us and our competitors that allows them to keep doing those tests that they did on the proving ground, but in real world scenarios. They may collect 1,000 hours of raw data and then only have an autonomous emergency breaking (AEB) event kick in three times in those 1,000 hours. They will then look at the OxTS data at that time and say something like, “Did the dashboard light come on and then did the brake kick in at the required time to avoid the collision?”
So, they rely on the INS data to be accurate all the time. It cannot be that in 1,000 hours, if you get those three events, two of them do not meet the accuracy requirements to be your ground truth sensor. Because then they would basically say, well, we don’t know whether the AV kicks in at the right time on the open road. They would have to fall back to the proving ground testing to have any confidence. So, that’s where the automotive world is looking to use an INS to reference its onboard sensors.
In autonomy and survey, on the other hand, the INS is used actively to feed another sensor to either georeference or, in the case of autonomy, actively navigate the vehicle. So, that data being accurate is critical because an autonomous vehicle without accurate navigation cannot move effectively and would have to revert to manual operation. There’s a lot to do with localization and perception and avoidance of obstructions and things like that.
Timing synchronization is critical. People haven’t solved a way to synchronize multiple vehicles without using GNSS and PPS. Some people are using PTP to synchronize, but they’ll often have a GNSS receiver at the heart of it with the nanosecond-accurate time to be the actual synchronization time. And then everything else is a slave PTP device that operates off of that. So, if we did not give accurate timing, position and orientation, there is basically nothing that that vehicle could do to navigate other than navigating relative to where it was when it last had accurate INS time.
Often, these vehicles will enter a kind of limp mode or stop completely and require user operation to get it to the next stage. It’s where you see the street drone-type small robots now, which will stop if a pedestrian walks in front of it, obviously, because it is a safety requirement. But also, if it doesn’t know where it is, like a Roomba operating inside, it cannot localize with respect to landmarks that it has in its map, it will just effectively try to re-localize off of random movements until it can orient itself. In that scenario, an INS or an IMU can help you reduce the number of times that you’re losing absolute localization. Where the autonomy side of things comes in for us is if we can offer the navigation quality, more of the time and to a high accuracy but for acceptable cost, then the sensor is a viable one to be put into the autonomous vehicle.
In autonomy, our active and potential customers are looking to do everything for a very, very low cost base, because they know that they’re trying to reach consumers with these products rather than businesses. So, their value box is entirely within the algorithms that they’re selling. They’re trying to offer scalable solutions that could roll out to thousands or millions of vehicles around the world, with their algorithms at the center of them. That localization and perception stuff is where you see companies such as Nvidia getting involved, because they want to be at the heart of it. Then they say that they can support any sensor while not being tied to any one of them. However, their algorithm is always going to be there at the heart of it. They will have GNSS receivers they support, they will have IMUs, they will have cameras, lidar, and radar and all the other kinds of possible aiding sensors. But they will say that their algorithm will still function if you have any number of those being fed in at any time.
So, autonomy relates to automotive in a sense, because you have autonomous passenger vehicles, but you also have autonomous heavy industry and autonomous survey, where people are flying drones autonomously or operating Spot autonomous dog robots, things like that, which can still be a survey application where you don’t want to have a human in the loop but you still need to navigate precisely. Someone may be sending a Spot dog robot into a deactivated nuclear reactor where they don’t want to send a human, but they still need to get to a very specific point within that power station and report back. They need to avoid obstructions, they need to georeference data they collect, and then take a reading from a specific object or sensor that’s inside and come back out safely. So, accurate navigation throughout the whole process is very important.
I understand the role of OxTS in testing and development. However, are any of your systems going to be in any production vehicles?
Many of the companies that are working on autonomous passenger vehicles are realizing that they are still a long, long way away.
What about your presence in the auto market more broadly?
They are used, but as separate components. You will have GNSS, IMU, radar, cameras, and lidar but the localization and perception will all be done by the OEM or by a tier one supplier to the OEM. So, they don’t want a third-party solution that is giving them a guarantee of their position because it’s a black box. They need to have traceability and complete insight as to what each sensor is saying so that they can build in redundancy and bring the vehicle safely to a stop if one of those systems is reporting poor data. For production vehicles, we are very much used as a validation tool in the development stage, but in terms of producing the production vehicle, they need to have that visibility of the inner workings of the system. Most INSs will not give you that insight as to how they arrived at their navigation output, because that is proprietary information. As a result, many automotive customers are looking to do that themselves. However, as I said, they’re realizing that it’s very difficult, and they’re quite a long way from navigating anywhere.
Therefore, currently no OxTS products are in production vehicles.
Not for passenger autonomy. However, they are used in some of the other autonomous spaces, such as heavy industry, that take place in private, fixed spaces such as mines, quarries, and ports where there is little interaction with the public. That is not only because the vehicle price point is much higher for some of these mining vehicles and heavy industry vehicles, but also because you don’t have to have your algorithm and perception capability deal with vehicles that are not autonomous or are driven by drivers that are not trained on health and safety in the area.
In these private spaces, you can tune your systems to work with each other without having to worry about the pedestrians and the random vehicles for which you’ve not accounted in your perception algorithms. That’s where the divide comes at the moment. If there are untrained people in the area, then there’s a lot more to accommodate and that makes the proposition much more difficult.
Are you at liberty to discuss any recent end user success story with your products?
The Ordnance Survey in the UK has been using our INS to create 3D maps on which they can then use semantic segmentation to classify features within the environment and pull out all the relevant features within a survey of a city, for example. They’re blending the raw data from OxTS lidar and map data that they have to create high accuracy 3D maps that can be used to add that third dimension to the high accuracy 2D maps that have been their value proposition for the past few decades. They can say, “here are all the trees in the environment” or all the traffic signs or buildings or that kind of thing that you’re going to see in Google Earth imagery. They start to reach the realms of high accuracy map data. They’re looking to sell that map data to commercial entities to monetize it and use it on a nationwide level and then on a global level.
If you have that map data, there’s a lot that you can do with it, in terms of intelligent decision making about routing a vehicle, or many other things, such as monitoring the heat output of buildings. In the EU, there are many directives around such things as carbon emissions. If you’re being more efficient with the heat output of your buildings, you can effectively say that you’re hitting your CO2 emissions reduction goals, by running whatever initiative to insulate buildings better and things like that. It always starts with, “Where was I when I saw this object or this building?” Therefore, I can georeference that building, I can color it by thermal imaging and things like that.
They can start to produce 3D imagery that is colored by thermal output, they can do it by any other number of sensors as well, that can give them meta data that can allow them to sell the data to someone else. It makes what was previously a very big job very efficient. So, they can drive hundreds of kilometers in a day where previously it was a static survey that was done over the course of weeks on foot. It’s also changing the efficiency metric that they can deliver to their end users.
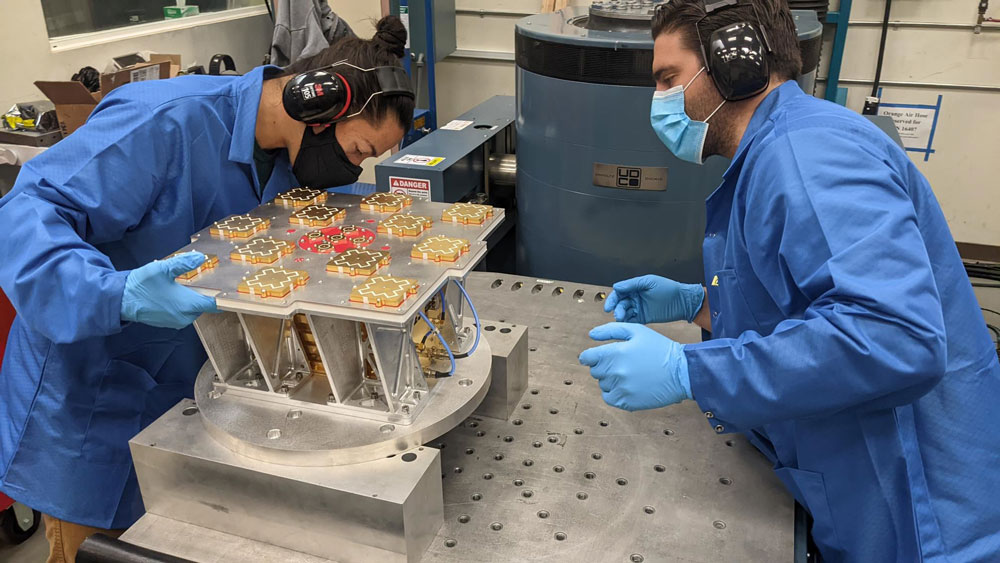
An exclusive interview with Garrett Payne, Navigation Engineer, Safran Federal Systems (formerly Orolia Defense & Security). For more exclusive interviews from this cover story, click here.
What led to the Versa PNT?
Garrett Payne
It is an all-in-one PNT solution that provides positioning, navigation, and very accurate timing. We can take in GNSS signals, as well as the satellite signals, and integrates that with an IMU for a fused solution. I work on the navigation filter and software inside it. So, I’ve been able to get deep into developing and fine tuning the filter inside for an assured and robust navigation solution. I’ve been able to integrate some other new kinds of PNT technology into that as well. So, I’ve been working on projects with integrating odometry for speed and measurements from a vision-based sensor for position fixing. Those are all complementary PNT sources that help the Versa. You always have a good fused solution, even if you’re in a GNSS-degraded/denied environment.
It sounds like a sort of extreme sensor fusion, integrating every possible PNT source.
Correct. GNSS has global coverage, of course, while some positioning sources, such as UWB, are very local.
Can a Versa on a mobile platform transition seamlessly from one to the other?
It’s all very configurable. You can plug-and-play the sensors that you have. Then, you can check the integrity of each measurement source. For example, if you’re in a GNSS-degraded environment, the Versa has some software that can alert you to that and will automatically filter out those measurements, and then navigate based on the other sensors.
With UWB, if there’s nothing local and already mapped out, could you set up some transmitters very quickly, as needed?
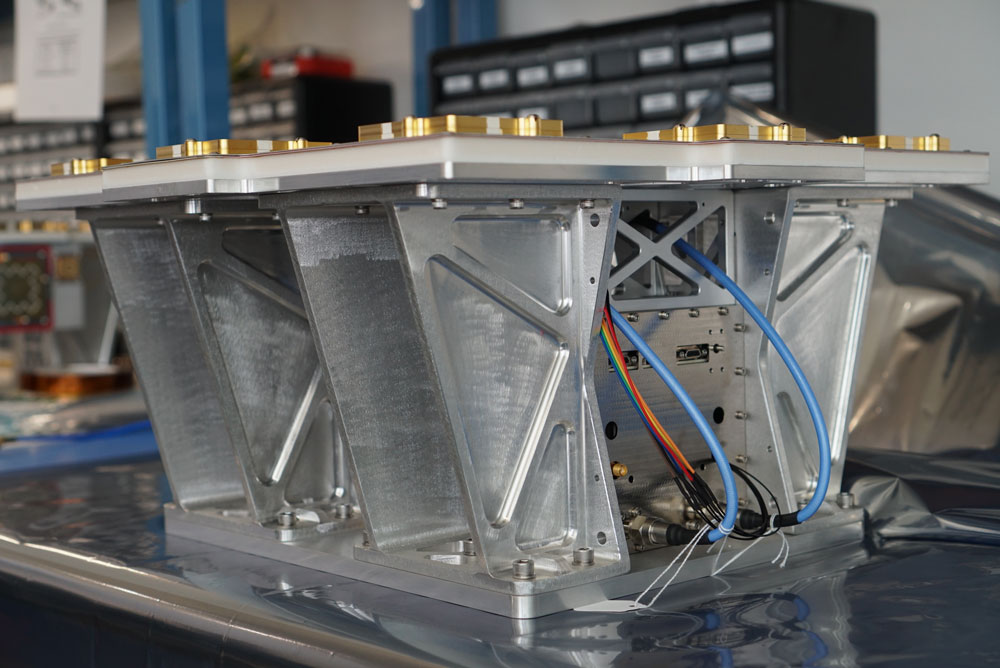
Versa PNT. (Image: Safran Federal Systems (formerly Orolia Defense & Security))
Our goal with this project of integrating UWB technology is to identify the exact sensors that we would need. Then it would just be plug-and-play: you would take a Versa unit and plug in a UWB sensor, and it would be able to automatically detect that and talk to other Versa systems that have UWB transceivers. Once we get all the software figured out, it will be simple in GNSS-denied environments for these UWB transceivers to start talking to each other.
If you have units within a building that all have Versa PNTs with UWB, they can see each other’s relative position, but not their absolute position. However, if one of them is located at a known point, such as the entrance or a corner, that would serve as a reference for the other ones to know where they are within the building.
Right. The technology is proven. There are already sensors that do that in warehouses and other large buildings. We want to take that idea and expand it to other GNSS-denied/degraded locations. It would be the same concept: one Versa unit goes on the edge of an area and knows its location, then broadcasts it to other Versa units with UWB technology, enabling them to determine their absolute location as well.
If 50 meters is not enough to get outside the GNSS-denied/degraded area, you might set up a chain or a mash of as many units as needed.
Correct.
What’s your rough timeline to go live?
Currently, we’re evaluating UWB computer technology from different vendors and integrating it in the software portion. We will probably begin performing full field tests in the first quarter of 2024.
Are there any non-defense applications, such as with first responders?
We also provide very accurate beaconing signals that are used for location purposes. So, this is an additional technology that can be used in GNSS-degraded locations — such as deep urban canyons, jungles, or inside buildings — as long as long as you’re within range of the UWB transceiver.
You could accurately survey a point inside a structure ahead of time. Then you could place your UWB transmitter in that surveyed spot and provide the coordinates to other units for use in positioning.
Right, right. If you’re thinking of a very large building in a city, on every floor you could have a beacon in a very accurately surveyed location. So, if you’re in a rush, you can automatically determine your range from different beacons and use that data to determine your position.
How long has Versa PNT been available? Did it evolve from a previous solution you had?
Our company has been founded on timing. We have VersaSync, which provides very accurate timing signals. We’ve extended on that by adding a navigation solution. Many of our customers are using the timing portion of our platforms to generate very accurate frequency reference signals. It also provides an assured navigation solution by fusing GNSS and inertial data.
What markets and applications are you targeting?
Versa PNT. (Image: Safran Federal Systems (formerly Orolia Defense & Security))
We’re providing precise position, timing, and situational awareness for different applications. Our systems can be used for ground, air, and sea-based applications. We specifically at Orolia Defense and Security [now Safran Federal Systems] market towards the U.S. government, defense organizations, and contractors. Our systems have applications beyond defense and security, as they can be used anywhere accurate position and/or timing is needed.
How does the Versa fit into the larger debate about developing complementary PNT capabilities to compensate for the vulnerabilities of GNSS?
It is an expensive, high-end solution that fits a few niches. Every type of sensor that you’re using for PNT has its strengths and weaknesses. That’s why we have a very accurate navigation filter solution that dynamically evaluates the sensor inputs. GNSS is great but not always accurate or available. Other sensors are also not always reliable. That’s why we try to make the unit and the software inside it as customizable and flexible as possible.
Can you give me a couple of use cases?
If a ground vehicle application is entering a GNSS denied/degraded environment, the Versa PNT’s software will detect any kind of GNSS threat. So, it’s going to cut off the GNSS speed and continue to provide a PNP solution based on inputs from the other sensors — such as an IMU, a speedometer, an odometer, or a camera. They’re all providing you different position feeds, so that you can still have an insured position.
The VersaPNT also contains internal oscillators that can provide very accurate timing signals.
An IMU-derived position drifts, of course, so it needs to be periodically re-initialized.
That’s why it’s important to use a navigation filter that’s initialized with a good position from GNSS or other sources, so that you can estimate and dynamically correct the IMU drift using bias terms and offsets.
An exclusive interview with Paul Crampton, Senior Solutions Architect, Spirent Federal and Jan Ackermann, Director, Product Line Management, Spirent Communications. For more exclusive interviews from this cover story, click here.
Jan, what is the role of simulation in building a new GNSS with a very different constellation and very different orbits than existing ones?
J.A.: Before the Xona constellation or any other emerging constellation has deployed any satellites, simulation is the only way for any potential end-user or receiver OEM to assess its benefits. Before you can do live sky testing, a key part of enabling investment decisions — both for the end users as well as the receiver manufacturers, and everybody else — is to establish the benefits of an additional signal through simulation. Once it’s all up there and running, there are still benefits to simulation, but then there’s an alternative. Right now, there really isn’t an alternative to simulation.
With existing GNSS, you can record the live sky signals and compare them with the simulated ones. It’s a different challenge when it’s all in the lab or on paper.
JA: Yes, but it is not an entirely novel one, at least to us at Spirent. We went through it with other constellations and signals -for example with the early days of Galileo. It’s often the case that ICDs or services are published before there is a live-sky signal with which to compare them. So, we do have mechanisms in terms of first generating it from first principle, putting out the RF, running tests with that RF, and then seeing that what we put out is actually what we expect based on our inputs and the ICD. Obviously, we always work off the ICD, which is essentially our master. Then, a lot of work needs to happen to turn what’s written in the ICD into an actual full RF signal, overlay motion, and all those things. So, we have a well-established qualification mechanism to make sure that whole chain works for signals when we don’t have a real-world constellation.
Another very important check is when you work with some of the leading receiver manufacturers who have done their own implementation and you bring the two things together and see if they marry up. Then there’s always a bit of interesting conversation happening when things don’t line up, but we have a lot of experience in resolving that. So, there’s the internal (mathematical) validation of things — which we do internally, before we bring something to market — and then there is validation with partners, be they the constellation developer or a receiver manufacturer – or both.
JJ: Then, one step further from the receiver manufacturers, what we call the OEMs, want to validate that the receiver is doing what it’s supposed to do. The best way to do that is with a simulator. You can try to get a live sky signal, but it can be difficult. You must get on a roof. It may not have an optimal environment for that. The best way to prove that in a controlled environment is with a simulator. Spirent works with two levels of customers: first, the receiver manufacturers, then all the application vendors or OEMs that use those receivers.
JA: What we’ve done with the SimXona product recently follows very closely along those lines. First, we did validation ourselves. Then, we worked in a close partnership with Xona for them to certify that against some of their own developments. So, we follow that same proven development approach. It’s just that, in this case, the signal comes out of a LEO.
What is the division of labor here between Spirent Communications and Spirent Federal? In particular, which device comes into play with Xona?
PC: Spirent Federal has provided support to Xona but the equipment is the COTS equipment provided from the UK by Spirent Communications.
JA: This Xona product does not currently implement any restricted technology only accessible through Spirent Federal. That is very much the case, especially for the aspects of secure GPS, for which we have the proxy company, Spirent Federal. However, the SimXona product is a development through Spirent Communications, albeit heavily aided by Spirent Federal, from a technical perspective and others, but there are no Spirent-Federal-specific restricted elements to SimXona or the current Xona offering.
PC: If we ever had to go into a U.S. government facility to demonstrate SimXona or to sell it to them, that would be Spirent Federal that would be involved.
Due to the limited space available in print, I was able to use only used a small portion of the interviews I conducted for our July cover story. For full transcripts of them (totaling more than 12,000 words) see below:
Safran Federal Systems (formerly Orolia Defense & Security) makes the VersaPNT, which fuses every available PNT source — including GNSS, inertial, and vision-based sensors and odometry. I spoke with spoke with Garrett Payne, Navigation Engineer.
Xona Space Systems is developing a PNT constellation consisting of 300 low-Earth orbit (LEO) satellites. It expects its service, called PULSAR, to provide all the services that legacy GNSS provide and more. I spoke with Jaime Jaramillo, Director of Commercial Services.
Spirent Federal Systems and Spirent Communications are helping Xona develop its system by providing simulation and testing. I spoke with Paul Crampton, Senior Solutions Architect, Spirent Federal Systems as well as Jan Ackermann, Director, Product Line Management and Adam Price, Vice President – PNT Simulation at Spirent Communications.
Oxford Technical Solutions develops navigation using inertial systems. I spoke with Paris Austin, Head of Product – New Technology.
Satelles has developed Satellite Time and Location (STL), a PNT system that piggybacks on the Iridium low-Earth orbit (LEO) satellites. It can be used as a standalone solution where GNSS signals will not reach, such as indoors, or are otherwise unavailable. I spoke with Dr. Michael O’Connor, CEO.
Locata has developed an alternative PNT (A-PNT) system that is completely independent from GNSS and is based on a network of local ground‐based transmitters called LocataLites. I spoke with Nunzio Gambale, founder, chairman, and CEO.
A business-to-business, controlled-circulation magazine such as this one is a three-way partnership between the companies that support it by buying ads; the staff who write, edit and lay out the magazine’s editorial content, write a steady stream of posts for our website and digital newsletters, and sell advertising; and you, the readers, without whom we would not exist.
There are more than 30,000 of you who subscribe to the magazine (more than 17,000 to the print edition and more than 18,000 to the digital edition, with some overlap). Additionally, our website has about 97,000 unique monthly visitors, our e-newsletters have about 92,000 monthly subscribers, and we have about 46,000 social media followers. About 30% of you are in surveying and mapping, 18% in defense and government, 13% in professional and consumer OEM, and others in transportation, wireless/location-based services, distribution and resale, machine control and precision agriculture, and system design and testing.
You’re a large pool of knowledge, experience, and insight. I want to invite you to contribute to GPS World as sources, advisers and writers.
Perhaps you are a retired engineer with decades of experience designing receivers, antennas, or navigation systems and would like to share a few of the lessons you’ve learned. Perhaps you are a surveyor with a wish list of features for the next generation of rovers. Perhaps you are the manager of a port that uses GNSS to automate ship loading and unloading operations, or of a farm that relies on precision agriculture, and you have some observations worth sharing about your return on investment.
If you are a professor of engineering, you might want to bring to my attention a particularly promising student project. If you develop consumer products or positioning and navigation solutions for mass transit, or timing solutions for the financial sector, you might have interesting insights to share.
Alternatively, perhaps you would like to propose a question for our editorial advisory board, or a topic for the next installment of our “Authoritative Reference” series. Of course, occasionally you might also want to point out errors or omissions in one of our published articles or online posts. I welcome that feedback, too.
We already work with the marketing and media relations staff of our marketing partners, as well as public relations firms that represent GNSS/PNT companies. I always welcome their email messages and calls. This is not intended as an additional channel for them. I am also not setting up a discussion forum, because that would require content moderation and backend IT resources. Rather, I want to solicit comments, suggestions and interesting, useful content from people throughout the industry — some of which will guide or inspire my editorial choices and some of which I will publish.
We have limited room in print, but plenty online. Therefore, while I will occasionally work with the author of a particularly interesting or informative piece to generate an article for print publication, I will much more often choose articles, columns, and comments for online publication.
Q & A with Peter Soar, Business Development Manager, Military and Defense, Hexagon | NovAtel. Read more from this cover story here.
U.S. Army m2A3 Bradley Fighting Vehicle prepares for a platoon live-fire exercise at Pabradė Training Area, Lithuania, Oct. 13, 2022. It has a GAJT anti-jamming antenna. (Image: U.S. Army National Guard photo by Sgt. Lianne M. Hirano)
What have been the advances since you began deliveries of the GAJT-710ML?
The original signal plan for GAJT-710ML was GPS L1 and GPS L2 only, with specific capability to use civil, P(Y) and M-Codes. GAJT-710ML as delivered in 2019 addressed GPS L1, Galileo E1, QZSS L1, GPS L2, QZSS L2. The version delivered provides situational awareness by jammer power level – by automatic gain control (AGC), as well as jammer direction-finding to the most powerful jamming signal. We are in the process of improving GAJT-710ML to be able to give simultaneous directions to multiple jammers.
Meanwhile, deployment of GAJT-410ML has started. This is a 4-element version of the same technology as GAJT-710ML but for smaller platforms. By using an internal junction box, the user can install this GAJT with just one small RF cable penetrating the vehicle armor. The latest GAJT version is GAJT-AE2. This UK-built board-level product is also able to use the strong L5 signals.
We have also launched the Robust Dual Antenna Receiver (RoDAR). Our engineers put an anti-jam algorithm directly on our OEM7 dual-antenna receivers (OEM718D and OEM7720).This is for the very small platforms that cannot carry a full GAJT. It only provides one null (as it has two antennas) although it does so simultaneously on L1 and L5 and related GNSS signals.
NovAtel’s GAJT are commercial off-the-shelf (COTS) products. How does that help you with exports?
GAJT products are built in Canada (mainly) and the UK and are subject from source to the Controlled Goods Program of Canada and UK Export controls respectively, but are not subject to U.S. International Traffic in Arms Regulations (ITAR) until shipped to the United States. RoDAR is based on OEM7 receivers which are free from export controls and because only one null is created per frequency, the RoDAR configuration is also free from export controls.
Once goods controlled by Canada or the UK land in the United States, or are incorporated into an already ITAR controlled system, then they become subject to the ITAR. Being COTS helps with export classifications because GAJT is dual-use. For example, it is used in oil and gas exploration. One of the ways that we work with the U.S. Department of Defense and other departments is via Hexagon U.S. Federal, which is a U.S.-proxied organization that can operate at classification levels beyond what other Hexagon units can.
Has the form factor remained essentially the same, and will it remain the same, while you upgrade the electronics?
The GAJT-710ML form-factor remains unchanged. This is important because the installation schemes take time to design and the customer likes continuity in the area. We intend for follow-on products —which will naturally be better performing, lower volume and lower power — to have an optional interface that will allow mounting on existing installation schemes. GAJT-410ML and the other products are smaller.
Hexagon says that its anti-jam technology increasingly emphasizes protecting GPS signals against Cyber Electromagnetic Activities (CEMA) from the advanced armed forces of nations. What are some examples and in what direction is anti-jam technology evolving?
Most conflicts of the previous generation were “asymmetric” in terms of the military technology deployed by each side. Now we see more conflicts between advanced armed forces which are more symmetric and expect that to continue. Anti-Jam technology is evolving to encompass all the GNSS signals and other PNT sensors that are being used by allied defense forces. This includes added GPS signals (beyond L1 and L2) as well as GNSS, L-Band corrections, SBAS and other emerging PNT signals. One task for us is to discern users’ requirements. Even within NATO there are different national policies as to which signals and sensors are essential/desirable/not to be used.
Exclusive interview with Lt. Col. Robert O. Wray, Commander 2nd Space Operations Squadron, Schriever Space Force Base, Colorado. Read more from this cover story here.
Matteo Luccio, GPS World’s editor-in-chief, had the opportunity to interview Lt. Col. Robert O. Wray, Commander, 2nd Space Operations Squadron, at Schriever Space Force Base, Colorado. (U.S. Space Force photo by Dennis Rogers)
The entire Global Positioning System constellation comprised of 38 satellites — with its billions of users and myriad military, commercial, consumer and scientific applications — is controlled from one room in a gray office building on a small military base about nine miles east of Colorado Springs, Colorado. The base is Schriever Space Force Base (SFB) and the room is the “operations floor” of the GPS Master Control Station (MCS). It is staffed by members of the 2nd Space Operations Squadron (2 SOPS), an active-duty unit of the U.S. Space Force, supplemented by members of the 19th Space Operations Squadron (19 SOPS), a unit of the U.S. Air Force Reserve. The two squadrons are known collectively as “Team Blackjack.”
Lt. Col. Robert O. Wray is the commander of 2 SOPS and of those 19 SOPS members assigned to the MCS. On March 16, at Schriever SFB, Wray spoke with me at length about the training and duties of his team members, the challenges they face, and what brought him to his current assignment. He then gave me a tour of the MCS and introduced me to each of the 10 people on duty. At any given time, eight of these operators are military personnel and two are civilian contractors. They receive feeds from a worldwide network of monitor stations and ground antennas, including telemetry from the satellites, that enable them to precisely monitor the satellites’ orbits and the state of their systems. The operators upload data and commands to the satellites around the clock to keep the constellation fine-tuned and respond to changing circumstances.
Two of the eight uniformed personnel in the room constitute the GPS Warfighter Collaboration Cell (GWCC), a customer interface that responds to calls from U.S. and allied military forces, as well as private companies and others who need support with GPS operations. One call might be from a military unit needing a boost in the power of the GPS signal in their area during a strike, another might be from a shipping company investigating signal interference near a port, and yet another from a federal civilian agency testing equipment. GWCC is also in daily contact with the U.S. Coast Guard’s Navigation Center and the Federal Aviation Administration (FAA).
Below, you can read a transcript of my interview with Wray, edited for clarity.
How do you recruit and select your operators? What is their typical background?
We have both commissioned officers and enlisted operators and they come from different sources, different backgrounds, different degrees of education. Most of our enlisted operators are first assignment personnel, meaning that they enlist, normally when they turn 18; they go through a Space Force-specific version of basic military training down at Lackland Air Force Base — so, there’s an overarching Air Force training, and then there’s some specific Space Force training —then, they go to an undergraduate space training at Vandenberg Space Force Base in California; then, they will come here and receive specific technical training on how to do their duties at the Second Space Operations Squadron, operating our equipment.
The 2nd Space Operations Squadron (2 SOPS) operates the GPS constellation around the clock, supplemented by members of the 19th Space Operations Squadron (19 SOPS). (U.S. Space Force photo by Dennis Rogers)
Our officers must go to college first, then they volunteer for specific career fields. Since the Space Force has been stood up, they can join it directly. They will say whether they would like to be a space operator or work on a different career field, such as cyberspace operations. In fact, for about 85% to 90% of my squadron’s personnel this is their first assignment. We can do that through all the training that we provide. We have one of the longer mission qualification training courses within the Space Force.
Roughly how long is the training for the enlisted personnel and for the officers?
For the enlisted personnel, there’s that undergraduate space training of about four months at Vandenberg. Then they come here and it’s 135 days for the enlisted training program. For the officers, we have a couple of different positions, so the training duration varies. On average, it’s about four months, ranging between three and six months; it just depends on their duties. My engineers have a six-month training course because they have more technical requirements. Some of my other officer positions might go through a three-month training course. Then, as they progress through their career here, they may go to back to an additional month-long training course, as their duties evolve, after they master their initial duties.
It’s interesting: for most of my engineers and operators, this is their first assignment and they get to choose the category of mission — such as operations versus cyber versus engineering — to establish their career field. However, they’re not given a list of units. So, most of these folks are just selected by the talent management office. They distribute talent based on people’s testing scores, backgrounds or, on the officer side, degrees, to make sure that we have a fair mix of personnel. I have a handful of personnel who were able to request 2 SOPS and those are mostly my senior management folks. They’ve completed a couple of assignments and are now coming back in a leadership position. For example, I requested this job. Then, I went before a board and it said, “Okay, based on your experience, your knowledge, and your interest, we’re going to assign you to the Second Space Operations Squadron.”
The 18 year-olds’ background is being teenagers, of course, but what is typically the officers’ background?
Most of our officers come in with STEM degrees. There are some exceptions. A STEM degree is not a prerequisite, because we will train you to the standard necessary to operate the GPS constellation, but most of them have degrees in that area. My engineers are required to have a bachelor’s degree in engineering — electrical engineering, mechanical engineering, aeronautical engineering — but for most other folks who come in, the Space Force leans very heavily toward STEM.
What key skills must your operators have?
Operating in space is complicated because we must consider orbital mechanics. So, you must be able to understand physics. In this job, just to understand how satellites work, you need to be able to absorb information quickly, because it’s always evolving as we get new capabilities. Our training days are long. To stay in this job, you must be able to retain a large volume of information and continue to progress the next day.
Not everyone does that. We do have people who just do not meet our training standards. So, we assign them to different types of jobs, not in the Second Space Operations Squadron. Not everyone graduates our training program. Once they graduate, however, we have very good retention rates. A typical assignment for operators is four years here, both for officers and for enlisted personnel. For our engineers and our other support personnel, it is a three-year assignment. So, those are locked down timelines, which build deep expertise and allow them to prepare future inbounds to take their place one day.
What do they spend most of the time doing?
Members of 2 SOPS, one member of 19 SOPS, and a visitor on the operations floor of the GPS Master Control Station. (U.S. Space Force photo by Tiana Williams)
We have a 10-member crew. There’s a crew commander, who is always an officer. Besides the technical acumen, these officers must be able to manage people and handle multiple anomalies going on at the same time, multiple different directives that we have coming in from different authorities, both civil requirements and military requirements. They need to know how to balance all of that and take care of the people and make sure that the missions are done in the correct priority order. So, there is a leadership element, besides knowing how to operate all the controls in the computer systems.
The crew commander manages the overall schedule. We have 38 satellites that we need to contact at least once a day, some of them more often than that. We have maintenance procedures. We have our ground infrastructure. So, deconflicting all those pieces and making sure there’s time to do all the different requirements is part of the commander’s overall job.
There is an enlisted crew chief as the senior enlisted position on the crew. That person’s job is to help with all the different reports we must submit, and then augment the crew commander. You have the satellite hardware that’s floating through space, and you want to make sure that the batteries and all the different components are operating correctly.
We have payload system operators, who assemble, correct and adjust the signal that we all receive and love that says what time it is and where you are on Earth. So, they are monitoring all the different monitoring systems we have around the world to say, “Yes, these signals are accurate.” And if there’s a slight deviation, then they identify it and say, “We need to contact the satellite and update the information on that.”
Earth is not a perfect sphere. So, as satellites go around, they drift due to the different pull from gravity. We have three vehicle system operators. These are junior enlisted positions; they are controlling the satellite hardware — mitigating effects from solar weather, ensuring that the satellite constellation is where it needs to be, performing all the different on-orbit type maintenance activities — and then they will receive direction from our engineers when we must maneuver the satellites.
We have two contracted positions. We have a network administration operator who is responsible for our ground infrastructure. Within the U.S. Space Force, there are two sets of ground infrastructure to control the satellites. We have our dedicated ground facilities to control the Global Positioning System and monitor it. We’re fortunate in that regard. So, we make sure those are operating properly and we have the correct communications. The other infrastructure is the U.S. Space Force’s Satellite Control Network, which we can share with other satellite constellations as a secondary system.
How often do you have to fire the boosters to adjust the position or trajectory of the GPS satellites?
Some satellites and some orbits are more problematic than others, due to the pull of gravity and other variables. We may have to fire the boosters on a satellite once every 12 months or only about 18 months. We plan those. Every now and then, a satellite might fail, or the atomic clocks might be shutting down and I have to move another satellite to replace its position in orbit. Those happen occasionally, maybe once every two years. And that can be a longer-term burn where the thrusters will burn longer and the satellite will drift for weeks at a time. All our satellites are loaded with plenty of fuel, so fuel has never been a limiting factor in the life of any of our satellites.
We’re fortunate that, as a whole, they have fairly stable orbits and that most of the corrections we can make from a very slight drift, we can correct with the signal that we transmit, as opposed to having to do many tiny maneuvers. When we do those tiny maneuvers, we then have to make that satellite not visible to users, because we are not able to correct in real time for its movements while it’s maneuvering so your calculation for you would be off, even during the second or two while it is maneuvering. That’s why we will correct with our signal to compensate for a very slight drift. Then when the drift gets closer to a meter, we will then maneuver it back into its optimal spot in its orbit.
What satellite telemetry do the operators monitor?
Besides the satellite’s location and orientation, we monitor such things as pressure on the solar panels, temperature and impact from radiation — not only from the Van Allen belts, but from any kind of solar activity.
What else do they monitor? For example, the health of the various systems, the battery charge, etc.
We have three formal missions: precision navigation, precision timing, and nuclear detection support. Each of the satellites has a nuclear detection payload. So, there’s plenty of different information they monitor relative to that, including our ability to cross-link that nuclear detection information between satellites. Are those systems operating optimally? We make sure that we downlink the information to the Air Force Technical Analysis Center, which receives all that and will receive a real-time nuclear detonation detection notification. While we control that system, we don’t receive that data. So, if there’s a nuclear detonation somewhere, that won’t show up on my screens. We make sure that the whole system is in place, and then the appropriate people who know how to interpret that data — they’re located at Buckley Space Force Base in Colorado — are the ones who receive that data day-to-day. So, our operators are monitoring to make sure that that part of our mission is working properly as well.
Why were those nuclear explosion detectors put on the GPS satellites originally?
Fifty years ago, when GPS was first commissioned as a program, it was very hard to get it through Congress. And so what actually sold this to Congress, was the enduring requirement that we would have this nuclear detection capability. The idea of having global coverage for a nuclear detonation event — this is before the advent of overhead persistent infrared radar — was how GPS got off the ground. Now, who could live without GPS?
We maintain that capability because it’s useful to the United States. The nuclear detection system supplements other capabilities and works on almost all the 38 satellites. And it’s something we can advertise to the public. “Hey, adversaries, if you’re going to do any surface nuclear testing, we’ll be able to detect it and know instantly, because everything’s in view of GPS.” In terms of the power requirements on a GPS satellite, it’s not a big percentage. It’s a very small payload. Eliminating it would not save much in terms of costs. It is a lot of value added for the small cost it incurs.
Besides occasionally adjusting the satellites’ trajectories, what other tweaks do your operators have to make?
While at the Master Control Station, Luccio was given the opportunity to send a command to a GPS satellite. (U.S. Space Force photo by Tiana Williams)
We update the timing frequently, to make it as precise as we can. We’re monitoring the satellites. One of the misconceptions with GPS is that we are actively talking to each of the satellites at the same time. We monitor all the satellites in real time, we know what they’re sending down to Earth and can say, “Alright, this is where the satellites say they are versus where we think they actually are.” We monitor that part. But in terms of communicating with the satellites, for their state of health, or to update timing, we don’t have that real-time link. We have our dedicated ground infrastructure, and then the U.S. Space Force has its own shared infrastructure — the Satellite Control Network I mentioned earlier — which has seven antennas around the globe. However, I have more satellites than that, so I can’t be in contact with every one of them at the same time.
Sometimes our updates build between different contacts. That’s why our timing, between updates, might drift a billionth of a second. We’ll make sure that we push that there. As for the location, the satellite thinks it’s in one place over Earth, but between our different monitoring assets, we know that it’s actually a quarter of a meter further along in its orbital plane. We will then tell the satellite, “Okay, you’re actually here now.” We do several calibrations to double check the status of the systems. Can the battery fully charge and recharge? Are we able to reset all these parameters?
We’re monitoring the security of the system, verifying that no one has either tried to or been able to access a GPS satellite. That has never happened in our history, but we still monitor for it. The day we don’t is the day that someone tries, right?
We’re also sending updates about our ground infrastructure. So, if our ground infrastructure is going to be using new encryption or a new type of commands, we need to update the memory banks on the satellites so that they understand how the commands will look as they evolve over time. I can’t upgrade the satellite’s hardware once it is on orbit, only its software, but I can upgrade what I have here on the ground and make sure that we’re also passing those kinds of updates to the satellites, sometimes several times a day, so that we can be responsive as technology evolves here on Earth.
What is involved in a handover of satellite control authority for a new satellite from Space Systems Command to Space Operations Command? Most recently, you received SV06.
Yes, SV 06, which we also call satellite vehicle 79 because it is the 79th that we have launched in orbit. Some of our satellites are more than 25 years old, so we track them by number. Space Systems Command will have a certification list that specifies the performance standards and whether there are any deviations from them — for example, this light doesn’t indicate on your screen or a satellite is unable to do something. That’s happened in the history of launches. Most satellites have two to three atomic clocks. Occasionally, one of those three will not operate when it gets on orbit. We’re going to check it out and I’ll say, “Okay, he’s your satellite, it has only two clocks.” That can still buy us 20 plus years of time.
They’ll identify anything that didn’t meet standards during the building, acquisition, fielding or launching of the satellite. SV06 had zero deficiencies. We were very, very pleased with that. It’s a testament to the engineering and the time and the checkout that it took to launch it. So, this handover was very simple. They gave us a report that said, “Here’s everything that we were asked to build, and we delivered it exactly as we were supposed to.” As operators, we will sit alongside them and validate that the satellite is sending the information, that our system can ingest it, that we can send commands to the satellite and that it will respond as expected.
At that point, Space Systems Command turns to Space Operations Command, which is commanded by Lieutenant General Whiting. Space Operations Command is the operational acceptance authority and supports U.S. Space Command as the combatant command. Space Systems Command will provide that report. Then a general officer will say, “Yes, I accept this satellite,” either as is or with the risks. Or, they could say, “No, I want you to go fix this, Space Systems Command. It’s not ready yet for us to start using and present as a capability to the United States Space Command.” Say that they couldn’t get the clocks to turn on at all. Space Operations Command will not want to receive that satellite because it’s not valuable to Space Command. We can’t compute a navigation signal without atomic clocks.
Then we would say, “Alright, Space Systems Command, figure out why the clocks aren’t working and get them to turn on.” This is just an example, but it has never happened. Once Space Operations Command has satellite control authority, they give the satellite to me and my squadron and say, “Okay, 2 SOPS, this is yours. In accordance with your directives, provide the GPS signal. You are free to conduct your final checkouts.” Our final checkouts took about three weeks. That was mostly because we had to check out the nuclear detection system and that calibration process takes a little while. We didn’t feel the need to rush it, so we did it in a deliberate manner. After that, we made the signal healthy and visible to all users in the world. Now it’s on par with any of our other satellites in terms of how we maintain it and control it.
Where is the satellite physically at the moment of handover from Space Systems Command to Space Operations Command?
It’s on orbit, it’s already in its designated plane. Space Systems Command is responsible for the launching and placement of the satellite. They own the rocket contracts. They’ll make sure that it gets in the right place. If it is not in the right place, they’re not going to give it to us because it’s part of their mission. We’re there monitoring it from the second it is launched. We coordinate very well with each other, but they have ownership of it and the authority to make additional maneuvers before it’s in place. But the systems aren’t on, the satellite is not visible to public users. It’s just a piece of metal and circuits flying through space at that point. That’s why Space Systems Command still has the control authority for it at that point.
If the satellite is dark, how do you check the signal? And once you turn it on, it’s live for everybody, right?
Luccio receiving the “certificate of command” for having sent a command to a GPS satellite to a GPS satellite. (U.S. Space Force photo by Tiana Williams)
The satellite is powered on, but the signal is not made visible to users. We’re able to send test commands internally that are visible only by us and receive signals that users don’t see. Just like if we’re testing, upgrading or maneuvering a satellite, we don’t power it down, we just make sure that it doesn’t send a signal that users can see and ingest. We send out public notification of that, in case someone was doing testing with a very specific satellite. We’ll do that in advance for any satellite. If it is an unplanned outage, we’ll send the notice as soon as we know that there’s a problem with the satellite. In this case, the new satellite is on and what we’ll do first is verify that the satellite can receive commands and control from us. Before we even care about what signal it is outputting, we’ll just make sure that we can talk to it, and that it responds the right way. So, yeah, day one is not “Let’s see if you can receive the signal on your phone.”
How can a signal, on L3 or L5, be visible to your team but not to any user?
We set it unhealthy, so that GPS receivers will exclude it from their calculation.
Oh, so it’s not that they don’t physically receive the signal, it’s just that they don’t use it.
When we first launch a satellite, we’re not transmitting any signals. Only after we do all that initial checkout will we turn on the signal generator on the satellite. We’ll check the signals, one at a time, to make sure that they’re accurate, but we’ll be the only ones looking for them because we’re doing a checkout. When we launch a satellite, at first the position we broadcast is wildly inaccurate, because it is figuring out where it is on orbit. It takes several uploads and different commands over a couple of days for it to get to the accuracy that we want. So, even if you were looking for it, it would be very hard. You might find a signal that says that it is a million miles away from where it is. You wouldn’t even look for a signal like that. So, it’s a deliberate process.
What does completion of the GPS III modernization program mean for your operation, now that SV10 has been declared available for launch?
GPS III is definitely a better satellite system than its predecessors. It has more modern technology, it is better for anti-jamming. However, for my operation, it does not necessarily mean a lot, day to day. We could continue controlling more satellites. Under my current architecture, I can only set 31 satellites healthy at a time. The extra ones are just spares. So, even if I have all 10 online, I’ll still be limited until we can bring our next generation command and control system online to fully utilize the capabilities of the GPS constellation.
As we start to have a higher percentage of GPS III and III F satellites online, I’ll have a more robust capability. Right now, any navigation and timing solution that you compute will still involve our legacy GPS IIF, IIR, and IIR-M satellites. So, while the IIIs are better — the constellation is newer and more resilient — it will not necessarily change my operation and there will not necessarily be a significant impact for the average user at the onset.
A model of a GPS satellite. (U.S. Space Force photo by Dennis Rogers)
What’s involved in a shift change between 2 SOPS and 19 SOPS personnel? Or do they operate together?
19 SOPS is our reserve affiliate, whereas 2 SOPS is an active duty unit comprised of Space Force Guardians and Air Force Airmen. The Space Force does not have a reserve component like the other military branches. So, we have an Air Force Reserve unit, 19 SOPS, and they provide people and expertise. They represent a little more than 20% of my manpower. They have people who are mobilized to work either full time or for a set duration, supporting different facets of my mission. They do upgrades and engineering, and then I have 19 SOPS personnel on crew conducting operations. For example, I have six crews, one of my crews has a 19 SOPS crew commander and the rest of the personnel are 2 SOPS. On a different crew, my vehicle system operator or my payload system operator may be a 19 SOPS person. We are all integrated.
We are a great example of a total force unit, which is what we call it when we have the active and the reserve part of the military, in the Space Force. It’s an awesome opportunity, because I’ll have 19 SOPS personnel whose day job might be working for Lockheed Martin — they’ll be working on building satellites or on repairing GPS systems — then they’ll be mobilized for four to six months, come work on crew and bring that expertise that they have from their civilian job into our team here. So, we have a great setup and I’m proud to have 19 SOPS as part of this team. We call ourselves Team Blackjack, because 2 + 19 = 21.
What brought you to your current position?
After I graduated from Columbia University, via the Reserve Officer Training Corps, I was commissioned into the Air Force in 2006. I switched to the Space Force in 2020.
What was your major at Columbia?
Political science and history.
My undergraduate (Stony Brook) and graduate (MIT) degrees are also in political science.
Those were great times. When I joined the U.S. Air Force, I was told I would be a space officer. So, that’s how I got into space. I’ve always had a personal fascination with space. Growing up, my favorite show was “Star Trek: The Next Generation.” The Delta logo of the U.S. Space Force was modeled in part off the Star Trek logo. So, I’m proud that I get to wear a Star Trek logo on my uniform every day, paying a little respect to the heritage that helped popularize space in this country.
In my previous posting, I was at the Department of State. I worked in the Bureau of Arms Control, Verification and Compliance in the Office of Emerging Security Challenges. I had a broad portfolio, including dealing with space policy and space security issues, as well as other emerging security requirements, such as treaty disagreements.
What attracted you to GPS in particular?
Lt. Col. Wray graduated from Columbia University with a degree in political science and history. (U.S. Space Force photo by Dennis Rogers)
The United States has made GPS available for free to users around the world. Our government also does things like teach people how to enhance their farming, how to increase food for their country. The U.S. Space Force can provide GPS products to help countries that are trying to stop human trafficking or are trying to do drug interdiction operations in the mountainous terrain of places like South America. Understanding how GPS is an instrument of American soft power really inspired me to think that this was something I would like to do once I returned from Washington, D.C. I switched to the U.S. Space Force while I was at the Department of State
That’s really where GPS sunk in for me. I’m an electronic warfare specialist. My background is counterspace, which is the ability to negate the space activities of an adversary. GPS is a little atypical from that. But I requested to the board that selected me for this position to be able to have that opportunity. I learned through my experience at the State Department how GPS impacts so many countries and so many facets of how the United States does business. I just thought, wow, this is the face of space! So, why not be here. I was pleased I was selected for this opportunity.
I’ve been watching Star Trek from the very beginning, in 1967, all the way to “Star Trek: Picard” now.
It never gets old, trust me.
What do you think when you see an emergency vehicle go by or when you see someone looking at their location on their phone, knowing that you are one of the key people responsible for ensuring that GPS is healthy 24/7/365?
Obviously, I’m proud of the mission and proud of my Airmen and Guardians who make it happen day to day. I am also a crew commander, so I’m on shift one day a month, pushing the buttons and making sure that everything is where it needs to be. It’s really my team that provides the 24/7/365 presence. When I see an ambulance driving by specifically, I think about the Trident Juncture NATO exercise in 2018. Russia responded to it by placing very powerful GPS jammers on the border with Norway and Finland, broadcasting a very powerful signal, and jamming GPS in Norway for more than a year and a half. That jamming had tangible impacts. The most notable was on ambulances, which couldn’t reach very ill people and prevented them from receiving life-saving medical care. In Norway, civil air traffic could only fly when the weather was good, because they had to fly visually only because they couldn’t rely on their GPS receivers. It had multiple ripple impacts, not for the Norwegian military, but only for civil users.
So, when I see an ambulance drive by, I think of the places around the world where ambulances are impacted because people interfere with GPS and the dependencies on it. Military users, such as F-35 pilots, train to operate without GPS but not ambulance drivers, civil pilots, and all the different people who are impacted by it. So that’s what I think about when I see an ambulance drive by. I’m proud to try to make GPS as available as possible to as many users around the world. It’s not just our ambulances, it’s all the other ambulances, all the different people everywhere around the world.
One of the things I’ve come to appreciate even more so in this job is our support of critical infrastructure in this country. How many facets of American life are enabled by GPS? To me, that’s why I think it’s not just the economic impact — that’s a much-touted stat, OK, yes, GPS enables so much of our GDP, but it also enables the timing for our electrical grid.
The Internet, financial institutions, broadcasting…
The Swift banking system. In the United States, $1.5 quadrillion in economic activity processed annually are associated with GPS timing. There are so many ways in which GPS enables our way of life. I’ve already talked about agriculture. From points of sale, buying gas at a gas station, to your retirement accounts and the trades that are made with that, to commercial shipping, and I could go on. It’s not just about helping you get to a location.
I think our timing mission is the most powerful because of how much it touches. So, when I see a dam letting out water, I know that’s controlled through GPS and that they will be able to close that dam, because they’re able to send signals all linked to GPS timing, so they don’t flood a town downstream. I look at that as a powerful example of GPS, not just the ambulance going to find someone who’s in distress.
What special challenges do you face during a war such as the current one in Ukraine?
Our Global Warfighter Collaboration Cell is also part of our crew. They received taskings from the combatant command involved in that war, whether for the United States or any of our allies and partners. We also receive requests directly from our allies and partners every day, especially from the Brits and the Aussies. They’re always asking for coordination for either military operation or testing. That’s great, that’s what we’re here for.
If the war extends to space and someone might be targeting one of our assets, well, that’s a concern. GPS satellites don’t have any defensive mechanisms. We advertise their positions. We believe that, because the primary beneficiaries are civil users around the world, it has its own special place up there. We focus on that part of the mission rather than enabling GPS to be a defensive asset.
(U.S. Space Force photo by Dennis Rogers)
So, most of what we have to do with the war is the effects provided by GPS to different users. They will send in requests — through their government, a civil agency, or a combatant command in whatever theater. They’ll say, “Hey, I would like to enhance GPS. I would like information about jamming in my area. I would like predictive products.” One of the most powerful things we can do is to model GPS well into the future. So, if I want to have a precision munitions strike, if I want to conduct a hostage rescue during a conflict, all these different types of things, we can tell them when GPS will be most accurate, maybe when the constellation is not optimized. “Oh, you’re in a deep canyon or ravine? OK, let’s model your situation because maybe you can’t see as many satellites.” We can help planners for a wartime environment.
I can’t stop someone from jamming GPS locally. I operate in space, I don’t operate in that theater where the jammer is, but we can provide information to the combatant commands who can act on that should they choose to. We can provide support, whether it’s with increasing power, or by providing support for munitions strikes. If there’s a search and rescue in a conflict zone or natural disaster, we can provide enhanced GPS support and predictive products for rescuers who might be dealing with the aftermath of a conflict or a natural disaster. We are a supporting entity for those involved in any kind of conflict.
Depending on where you are, we normally accept either unclassified or secret level requests. We have a variety of different users who ask for it. We can enhance the strength of the signal that we put out. It’s a finite enhancement, but maybe we can mitigate the effect of a jammer. Maybe the jammer’s radius isn’t as wide. A jammer on the ground, which can plug into an outlet in a building or a diesel generator, has more power than I can ever pack on a satellite on orbit, which lives off batteries and solar panels. We’re not designed to defeat jammers.
You’re transmitting with 30 W, less than most lightbulbs use, from 20,000 km!
You’re right. Our power output is much lower than that of a jammer, but that’s okay. We can also provide predictive routes and say, “Okay, for your planning purposes, where are there jammers? If you go this close, our signals will be degraded.” We have the L2 signal, which is a military encrypted signal that provides added resilience. However, to connect to that military signal, you need to first connect to the civil signal, the course/acquisition signal on L1. If I turn on a jammer right in this room, even if you had an L2-capable military grade receiver, if you weren’t already connected to GPS, it wouldn’t do you any good. We can provide that information to warfighters and say, “Alright, you can connect to our signal from here, where there are no jammers, then connect to L2 for the military encryption, before you try to conduct your military activities.” We provide that information to planners all around the world. We can provide it in real time, we can provide predictive analysis for hours, days, even weeks out.
If there were any kind of threats to GPS itself, they would be reported to U.S. Space Command and it would be up to them, if there were an actual threat to our satellites, or to our command and control architecture itself. The signal in space less so. That has to do with the other combatant commands. They will decide if they want to address a given threat, like if I set up a jammer somewhere.
My job is to provide the signal, support the users — so I could support testing, warfighting actions, health and status upgrades — make sure that it’s available. At the end of the day, it is the users — whether it’s Apple building a new phone, or U.S. Indo-Pacific Command wanting to conduct an exercise in the Pacific with a bunch of allies — that tell us exactly what they need and when they need it, and we’ll support them the best we can.
Some of the reports, you’ll receive through NavCen, the FAA, or some other civilian agency, right?
Our two most significant partnerships are with the Department of Transportation, with the FAA, and the Department of Homeland Security, where we work mostly through the Coast Guard Navigation Center (NavCen). Within Homeland Security I also work with the Cybersecurity and Infrastructure Security Agency (CISA), dealing with critical infrastructure. The Department of Transportation also has much broader equities than just what the FAA covers, but we’re in touch with those two agencies all throughout the day for several types of things. So, if there’s an air traffic-related type event, we will typically hear about it through the FAA. “We have an anomaly. This plane is reporting GPS issues.” We can assess and say, “Maybe there’s some space weather going on that is interfering with the receiver, especially at altitude,” or “We are we experiencing an issue with one of our satellites.” Normally, we can catch it pretty quickly, but potentially that can be the issue.
The NavCen has to do with any kind of maritime or terrestrial issue. So, all around the world, anyone who reports jamming, spoofing, or other GPS issues funnels them to NavCen, and then they’ll work with us. Maybe they’ll collect multiple reports if applicable, send them to us, and then we can assess whether the signal in space is good. Maybe there’s some localized testing. Maybe a friendly governments is doing some testing and a commercial ship has to be passing right by the testing area. We’ll provide that feedback to the user. Also, if there is a specific threat, we will also share that with other users who might be able to address it in that particular theater. So, if someone’s intentionally interfering with GPS, obviously, I can’t stop them. The Coast Guard can’t stop them. But we can provide that to the people who may be able to.
How will the transition to the Next Generation Operational Control System (OCX) impact your operations?
We’re excited to have OCX come online.
When will you complete the transition?
The timeline has been revised. I am not tracking a Full Operational Acceptance date — meaning the date OCX is transferred from Space Systems Command to Space Operations Command and given to me to use. Challenges with the program timeline are well documented. We are supporting testing. There have been upgrades, our ground infrastructure has been upgraded — there’s plenty of new equipment in my buildings and we are actively supporting testing.
I have a team of 2 and 19 SOPS personnel who are actively providing the operator engagement. “Hey, here are the things we need to do. Can we make sure that this works properly on this new baseline?” We’re very excited for OCX to come online, because it’ll enable us to fully use the L1C, L2C and the high-powered L5 signal, as well as M Code
We’re very much supportive. The sooner we can get OCX online, the better capability we can provide to both military and civil users. So, we’re excited for that. But, day-to-day, I have about 20 people who were supporting full time OCX development, testing, planning, all those type of things. As we get closer to fielding the system, there will be eventually dedicated tests with OCX on space-based assets. When that happens, I will need my operational crew personnel to be there, to conduct those tests, because we have the satellite control authority. Right now, all the testing has been limited to ground-based systems and testing with a closed loop system, not actually commanding any satellites.
Lt. Col. Wray gave Luccio a 2 SOPS patch, like the one on the wall behind them. (U.S. Space Force photo by Tiana Williams)
So, we’re able to work with the 20 people we have and all the wonderful personnel at Space Systems Command, and then their contractor Raytheon. I don’t have an exact date for the next step of testing yet. It’ll be after DD250, which is an acquisition milestone. It will involve our operators sending commands to satellites; validating, not just with the military, both the departments of Transportation and of Homeland Security, that the signal outputs are in accordance with all the specifications necessary for civil users as well. That will involve my operators and will be more time intensive than the current workload.
Will you transition to the new system gradually or all at once?
Users shouldn’t detect anything because, again, they’re only getting signals from the satellites. OCX is about how we talk to the satellites. I will not be able to simultaneously command from my current command and control architecture and the new one. I will transition the satellites one at a time. Each satellite can only be commanded by one or the other. In terms of how we compute a solution, our current command and control architecture uses a Kalman filter to do that math for us. The new one that will be delivered, will be ever so slightly different and we don’t want to have that mismatch.
So, when we’re ready, we will do deliberate testing where I can test one, two, three, four satellites on the new OCX, we will validate that it works, continue doing everything like normal — again, it should be transparent to the users. Then, once we have completed that testing and we’ve analyzed the data and worked with our civil counterparts to make sure that all stakeholders across the U.S. government are happy and that this meets all the requirements we need and will have no impact on any existing GPS users anywhere in the world, then we will make that decision to actually move all the satellites over, one at a time. It’ll take me a few days to transition to the new system, then we’re going to start operating on it.
Will users see any improvement?
The very first day that we transition, no. It’ll be the exact same. Once we are fully over on there and we have completed our final checkouts and Space Operations Command has operationally accepted the system, yes, users will see an improvement. We will be able to transmit the L5 signal with significantly more power. There’ll be more robust signals for anyone who needs that Safety of Life signal or who has a device that utilizes that. They’ll be able to use that capability in more places. If I’m in a deep canyon somewhere I’ll be able to use L5.
Our signal will be more resistant to jamming, which means that the average user, if there’s interference — whether it’s intentional or naturally occurring — will be less impacted by it. Our L1C signal, when that comes online, that will allow interoperability with other satellite constellations. So, I will be able to compute, potentially, a better navigation solution. Maybe the best four will be three GPS satellites and a Galileo satellite. That will benefit all users. If it’s more accurate, we will all appreciate the benefits from that.
2 SOPS patch (Photo by Matteo Luccio)
The strength of the L2C signal and the level of encryption will be much closer to the military level. So, if I’m in a city I will be able to better rely on GPS to help me, because I won’t be as worried about the interference from skyscrapers. If I’m hiking in a deep forest, my signal will be able to penetrate better through the trees. I’ll be less likely to ever lose GPS signal. So, there will be many benefits to users. That’s why I’m excited to bring this capability online. Everyone will benefit, right? And, of course, it will still be free for everybody. I think it will be a real winner for our government and for all users when we bring this system online.
Who is your closest counterpart at Galileo in terms of commanding its operation? Do you two talk to each other?
We’ve had a couple of interchanges with Galileo at our level. They have an operations floor and there have been times when we have talked to them directly, but most of the time that goes through the National Coordination Office: Mr. [Harold] Stormy Martin and his team. They normally do that external interface. [Galileo is run by] foreign governments and most of the interaction has to do with policy. We don’t interfere with each other’s signals. If there was a potential impact of, say, a collision, or one resource could affect the other, then yes, we’ll talk tactically to each other. “Okay, my satellite’s here, your satellite’s there, what are your challenges? Are you transmitting a signal you shouldn’t?” Or something along those lines. If there was a known threat in space, we could talk to each other in that regard. But day-to-day, I don’t talk too much to the Galileo operations team. Those interactions are mostly held at a higher level. I have no interactions with the BeiDou and GLONASS operations floors; any such discussions would be held at a higher level.
I was thinking more in terms of exchanging notes, professionally. “How do you handle this or that? We do it this way.”
Those interchanges do happen, but it won’t be my meeting. It won’t be something that I do on a day-to-day basis, like I do with the FAA or the Coast Guard Navigation Center. We talk to them all throughout the day. Those meetings are set up as specific technical interchanges organized by other Cabinet departments. They can invite me. We’ll talk and we’ll say, “Hey, yes, these are some of the things that we’re doing.” and they’ll say, “These are some of the things we’re doing.” “Okay, that’s very interesting.” So, we do have that cross talk, but they’re more structured, coordinated type events versus on the fly. So, unless there’s a crisis, or an interference issue where we need to resolve it quickly, they’re structured and planned.
How do you collaborate with NavCen to help them keep their information up to date and accurate?
We provide it as quickly as we humanly can. If we are planning something, they will be the first to know. If we have an anomaly or must take a satellite offline for some reason, we will send them a notification within a minute or two. That’s normally preceded by a phone call because that’s even faster. They have a 24-hour watch center. Then they’ll update that information and send it to users as need be. Our legal mandate is to be as transparent as possible. NavCen is a wonderful partner to help us with that, so we let them know as quickly as we can.
Our GPS Warfighter Collaboration Cell is that dedicated interface, so there’s always someone who’s ready. Even if the crew is troubleshooting a big problem, whatever it might be, they’re still making those notifications right away. That way, there’s no difference between what we’re tracking and what they’re tracking, and then it’s just the time it takes for a person to update various reporting or notification tools, so that the rest of the world can know as well.
So, you and Captain Scott Calhoun [NavCen’s commander] talk often?
Yes, Captain Calhoun is a great partner. We had an interchange in Stockholm together, for example, where we talked with the Swedish government. I was a presenter there on behalf of the Department of Transportation. We highlighted what GPS has done for civil users. Sweden was one of the first adopters of GPS in the world. They use it for their different civil and military applications. While we were there, Galileo also attended and that was an example a forum where they highlighted some of their best practices, and we shared some of our strengths as well. And so that was a productive forum. Captain Calhoun and I were both invited there; we both participated and highlighted our respective teams’ equities.
On the operations floor of the GPS Master Control Station at Schriever Space Force Base in Colorado, Luccio looks at feeds from a worldwide network of monitor stations and ground antennas. (Image: U.S. Space Force photo by Dennis Rogers)
The young operators on duty at the GPS Master Control Station, at Schriever Space Force Base in Colorado, receive feeds from a worldwide network of monitor stations and ground antennas, monitor the GPS satellites, and send them commands as needed. This month’s cover story features excerpts of an interview with their commander, Lt. Col. Robert O. Wray, about the training and duties of his team members, the challenges they face, and what brought him to his current assignment.
Q & A with Roger Hart, Director of Engineering, Spirent Federal Systems. Read more from this cover story here.
Why do you see the need to modernize GPS?
For many lay users, global navigation satellite systems (GNSS) are simply there, reliably guiding them and their systems to do the right thing in the right place at the right time. But with its vulnerabilities, we cannot take GNSS — GPS specifically — for granted, and it cannot remain static. Its ubiquity in commercial and defense applications demands ongoing improvements to signal quality, diversity, availability, and assurance. The GNSS signal space is increasingly contested, navigation warfare is common, and the risk to civilians and warfighters increases. For those of us focused on defense, we see the growing array of threats steadily ticking upward in novelty and number.
We applaud the ongoing efforts by the U.S. Space Force and Air Force to modernize the GPS space segment, control segment, and user equipment. GPS-contested and -denied environments are here to stay, so we must hone GPS as a tool for both the military and civil user.
How is Spirent Federal supporting modernization efforts?
In short, by providing deterministic simulation for future signals and capabilities not yet in theater. Regional Military Protection (RMP) is a recent example. RMP is a nascent anti-jamming capability that will be available on GPS III Follow On (GPS IIIF) satellites. RMP provides military users with a steerable, narrow-beam M-code signal that greatly amplifies the power over a defined geographical area. According to the GPS IIIF satellite manufacturer, Lockheed Martin, RMP can provide up to 60 times greater anti-jamming support. This allows U.S. and allied forces to operate with accuracy and resilience much closer to interfering sources than with legacy signals. GPSIIIF satellites with RMP are in production, and the latest publicly forecasted launch date is FY2027. With Spirent’s software-defined-radio-based simulator’s ability to support RMP simulation, modernized GPS user equipment (MGUE) can be tested and integrated with RMP early in the design phase before live-sky signals are available. Adaptive antennas, other constellations, encrypted signals, and non-RF sensors can also be tested with RMP. Coupled with this, the ability to simulate a wide range of edge cases during development enables superior performance in the real world.
Image: U.S. Space Force
And beyond RMP?
Low-Earth-orbit (LEO) constellations have been a focus for several years as we look to next-generation alternative positioning, navigation and timing (PNT) methods to complement GPS. We have developed LEO simulators for both the military and commercial sectors, including modeling tools that simplify the generation of large LEO constellations with high-fidelity orbital dynamics, delivering greater realism for applications that have no margin for error.
As GPS modernizes, there is a growing movement toward software-defined radio (SDR) architectures for both receivers and transmitters. Flexible SDR-based simulation encourages experimentation: on the same platform, applications can range from standard GNSS signals to entirely new constellations and RF modulations, including interference threats. Simulation of RF signals can be done in concert with inertial and other non-RF sensors, and deterministic architecture ensures that performance is maintained.
Another focus is on spoofing — creating tools to support defense in their efforts to harden GPS. One of the latest technological advancements in simulation is an “augmented reality” range capability: the device under test (DUT) on a moving aircraft or land vehicle is attached to a portable simulator. The DUT receives live-sky signals from the antenna on the vehicle but also receives additional spoofed signals injected by the live-sky-synced simulator.* The DUT’s resilience to the spoofed signals can then be analyzed and hardened against future spoofing attempts. Without the difficulties of setting up an open-air test, the real-world dynamics are employed in the test, heightening realism — and the simulated signals augment it.
*It is the sole responsibility of the user to obtain appropriate permits.
Which GNSS constellations do most receivers currently use? How is that mix changing?
“Most modern commercial receivers today are moving to receive all GNSS signals: GPS, GLONASS, Galileo, BeiDou, QZSS, IRNSS and so forth. Also important, in which bands does the receiver operate, and how many channels does it have for optimum accuracy and quicker cold start? Application and location for local stability are also factors. If the operation is in India, IRNSS would be important, in Japan QZSS, and so forth.”
— Ellen Hall Imminent Federal
“The current standard in commercial receivers is to exploit the interoperability between the various GNSS signals and to make use of all satellites in view, regardless of their constellation. While the L1/E1/B1 frequency band continues to be the primary frequency in almost all GNSS systems, the legacy L2 band is gradually losing its importance as most satellites are already broadcasting more advanced signals in the L5/E5 band.”
— Jean-Marie Sleewaegen Septentrio
“The newest phones offered by Google and the largest manufacturers in the world — Apple, Samsung, OPPO and Vivo — support the following positioning systems: Google — Pixel 7 and Pixel 7 Pro: GPS, GLONASS, Galileo, BeiDou, QZSS, and other // Apple — iPhone 14: GPS, GLONASS, Galileo, QZSS, and BeiDou // Samsung — S23 and most other recent versions: GPS, Galileo, GLONASS, and BeiDou // Xiaomi — Xiaomi 13 Pro: GPS (L1+L5), Galileo (E1+E5a), GLONASS (G1), BeiDou, NavIC (L5A-GPS supplementary positioning) // OPPO — F21: GPS, A-GPS, BeiDou, GLONASS, Galileo, and QZSS // Vivo — Vivo X90: GPS, A-GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC, Cell ID, Wi-Fi. // For farming, John Deere’s SF-RTK uses GPS, GLONASS, BeiDou and Galileo.”
— Bernard Gruber Northrop Grumman
“All modern generation cell phones use virtually all GNSS signals. This includes GPS, Galileo, GLONASS and BeiDou. In addition, they receive the correction signals, such as WAAS and EGNOS. This capability is embedded in the chips that are currently used. We are told that they have the capability to track on the order of 50 satellites at once. We expect that dual frequency is close to realization and the use of the new civil L5 signal will make cell phones even more capable.”
— Bradford W. Parkinson Stanford Center for Position, Navigation and Time
Colorado Springs, Colorado, and its vicinity are home to several key U.S. military organizations.
To the northwest is the U.S. Air Force Academy, which educates cadets for service in the officer corps of the United States Air Force and United States Space Force.
To the southwest, deep inside Cheyenne Mountain, is the North American Aerospace Defense Command (NORAD), a United States and Canadian organization charged with detecting, validating and warning of attacks against North America, whether by aircraft, missiles, or space vehicles. In a crisis, the four-star general in command of NORAD would pick up a direct line to the White House and tell the president whether nuclear armed missiles were on their way to the United States. He also commands the United States Northern Command, which is charged with defending the continental United States and Alaska.
I visited these two facilities 35 years ago, when I was a graduate student in international security at MIT. (The Air National Guard flew our group of MIT and Harvard students from Hanscom Air Force Base, near Boston, to Colorado Springs, with a stop at Offutt Air Force Base, home of the U.S. Strategic Command. One of the first Northrop B-2 Spirit, aka the Stealth Bomber, was there, under a tarp. A Harvard student decided to use the stop to go for a run. The MPs promptly arrested him and his professor had to bail him out, much to the amusement of us MIT students.)
In the southeast corner of the city is Peterson Space Force Base. To the east is the one that is of greatest interest to readers of this magazine: Schriever Space Force Base, the home of the GPS Master Control Station.
I recently visited the MCS at the invitation of Lt. Col. Robert O. Wray, Commander, 2nd Space Operations Squadron, which operates it. You can read excerpts of my interview with him here.
Wray gave me a tour of the MCS operations floor. During the tour, I was able to look at the dozens of computer monitors used by the GPS operators and to ask them many questions about their jobs. At any moment, 10 of them are on duty — eight uniformed military personnel and two civilian contractors. Later, I followed up with two members of the GPS Warfighter Collaboration Cell, which supports warfighters, combatant commands and, through the U.S. Coast Guard Navigation Center, more than four billion global civilian users.
Near the end of the tour, Wray surprised me with a question: “Would you like to send a command to a GPS satellite?” You can imagine my prompt answer. A moment later, I was seated at one of the consoles and entering an alpha-numeric string that I was copying from one of the screens. I was so delighted by the opportunity and so focused on entering the sequence correctly that I forgot to ask what command I was sending! Whatever it was, I assume it will help you get to your destination.