Lt. Col. Robert O. wray commands the 2nd Space Operations Squadron (2 SOPS), which operates GPS around the clock supplemented by members of the 19th Space Operations Squadron (19 SOPS). (Credit: U.S. Space Force photo by Dennis Rogers)
Exclusive GPS World interview with the commander of the unit that operates the GPS constellation
The entire Global Positioning System constellation comprised of 38 satellites — with its billions of users and myriad military, commercial, consumer and scientific applications — is controlled from one room in a gray office building on a small military base about nine miles east of Colorado Springs, Colorado. The base is Schriever Space Force Base (SFB) and the room is the “operations floor” of the GPS Master Control Station (MCS). It is staffed by members of the 2nd Space Operations Squadron (2 SOPS), an active-duty unit of the U.S. Space Force, supplemented by members of the 19th Space Operations Squadron (19 SOPS), a unit of the U.S. Air Force Reserve. The two squadrons are known collectively as “Team Blackjack.”
Lt. Col. Robert O. Wray is the commander of 2 SOPS and of those 19 SOPS members assigned to the MCS. On March 16, at Schriever SFB, Wray spoke at length with GPS World’s editor-in-chief, Matteo Luccio, about the training and duties of his team members, the challenges they face, and what brought him to his current assignment. He then gave Luccio a tour of the MCS and introduced him to each of the 10 people on duty. At any given time, eight of these operators are military personnel and two are civilian contractors. They receive feeds from a worldwide network of monitor stations and ground antennas, including telemetry from the satellites, that enable them to precisely monitor the satellites’ orbits and the state of their systems. The operators upload data and commands to the satellites around the clock to keep the constellation fine-tuned and respond to changing circumstances.
An abridged version of the interview will appear in the May issue of GPS World. A longer version will appear here on May 1.
How do/will/should North Atlantic Treaty Organization (NATO) forces integrate GPS and Galileo for position, navigation and time?
Ellen Hall
“For improved resiliency, it would be a great move for NATO to integrate Galileo with GPS into their system. The ‘how’ will be difficult. Some of the challenges are that the EU consists of more than a single nation with which to negotiate complex security issues, such as whether NATO will be treated as a ‘third nation entity’ for the use of PRS. The initial Galileo development was difficult for all these reasons and the Europeans managed to sort it all out, so I’m confident that, if the desire is to do this, it can be done successfully.”
— Ellen Hall Imminent Federal
John Fischer
“In the interest of operational robustness and the criticality of the use case, NATO should integrate GPS and Galileo capability at the earliest. Both GPS’ M-code and Galileo’s PRS are encrypted, providing anti-spoof capability and extra frequency diversity, making jamming of our forces more difficult. Crypto key management for both systems may be an extra burden, but a single receiver capable of operating with either system individually or both simultaneously would be key for interoperability — always a driving factor for NATO. The capability is available, and NATO should take advantage of it.”
Precision agriculture (PA) — which uses electronic information to better manage spatial and temporal variability in crops, livestock, forestry and other biological systems — is profitable, as proven by the rapid and widespread adoption of GNSS guidance for mechanized agriculture. Other enablers of PA include variable rate technology (VRT), remote-sensing using satellites and unmanned aerial vehicles, geographic information systems (GIS) and soil sampling.
In my introduction to our January cover story, I requested pointers to any “independent, reliable and comprehensive study” as to PA’s return on investment. In response, Professor Won Suk Lee, of the Department of Agricultural and Biological Engineering of the University of Florida Gainesville, introduced me to Professor James Lowenberg-DeBoer, who has more than 30 years of worldwide experience in agricultural research, teaching, outreach and leadership and was the president of the International Society of Precision Agriculture. His research focuses on the economics of agricultural technology.
Dr. Lowenberg-DeBoer wrote to me that “thousands of studies of profitability of precision agriculture” using “a wide range of methods and assumptions” arrive at “a relatively consistent set of conclusions.” He detailed them in a chapter on the economics of PA he wrote for a book published in 2019 (Precision agriculture for sustainability, edited by Dr. John Stafford, Silsoe Solutions, UK and published by Burleigh Dodds Science Publishing) and pointed out to me that additional studies of the topic conducted since then have not altered its conclusions.
Lowenberg-DeBoer used adoption of PA as a proxy for its profitability, because, he wrote, “Farming is a business and technology is adopted if it provides benefits for the farmer and farm household.” He focused on PA for crops on relatively large-scale mechanized farms, but the same principles and general conclusions apply to livestock, forestry and other biological production systems and to medium and small farms.
“Since GNSS guidance was introduced for ground-based agricultural equipment in the late 1990s,” he wrote, “almost all economic studies have shown positive economic benefits which could be quantified and substantial qualitative benefits which were more difficult to measure.”
He reported that within about 10 years of the introduction of both lightbars and autosteer, GNSS was used by about 80% of the dealers. Adoption of PA sensors, on the other hand, was slower. “While GNSS guidance is being adopted quickly almost wherever agriculture is mechanized, VRT is more likely to be found in ‘hot spots’ where the profit potential and soil variability combine to motivate adoption.”
Advances in autonomous robots will further revolutionize agriculture, Lowenberg-DeBoer predicted. “Implementing cropping tasks with swarms of small robots will change agronomic practices and the geography of agriculture. For example, with robotic pesticide application, it might be possible to spray each pest individually instead of broadcast application. This could reduce the amount of pesticide applied by [more than] 90% and reduce the negative effects on beneficial species.”
The Trektor hybrid robot for agriculture, made by the French company SITIA, can work on a variety of crops by changing the width of its wheelbase and can perform many repetitive tasks, such as spraying and hoeing. (Image: SITIA)
Precision agriculture has been around for more than 30 years and now covers the majority of U.S. farmland. It refers to the ability of farmers to observe, measure and respond precisely to the variability of soil and crop characteristics within and between fields by using maps of these characteristics and GNSS navigation. It enables them to reduce inputs of seed, water, fertilizer, pesticides and fuel while increasing outputs. It also enables them to work at night and in the fog and automate many functions at large feed lots.
For precision agriculture, GNSS integrity can mean the difference between, say, a robot protecting a vineyard by weeding and spraying pesticides or damaging it by straying onto the vines.
Autonomous Tractors, Mowers, and Feed Monitors
SITIA, a French company, has developed an autonomous tractor that is used by, among others, an organic vineyard in France’s Loire valley to tirelessly weed the narrow rows between the grape vines — compensating for the movement of young workers to cities. Thanks to the high accuracy and integrity of the Septentrio GNSS heading receiver inside, the autonomous tractor has decreased the damage to the vineyards by more than an order of magnitude compared to the traditional work done by a farmer with a manual tractor.
Renu Robotics, based in San Antonio, Texas, makes a robot for vegetation management, called Renubot. It uses machine learning, a form of artificial intelligence, to plan its route, optimize its energy consumption, perform self-diagnostics, collect environmental data and assess the topography that it traverses.
Navigation is based on a stored map of paths, a Septentrio RTK GPS receiver and sensors to avoid obstacles. A radio link enables the Renubot to communicate with a control center, for reporting and updates. When the Renubot returns to its recharge pod, it charges its lithium battery and performs updates and downloads.
Manabotix Pty. Ltd., an Australian company, has developed an automated system to monitor cattle in large feedlots, using GNSS, lidar scanning and other vision or perception technologies and artificial intelligence. This has greatly improved the accuracy and consistency of feedlot volume estimates, which for the previous 150 years had been the responsibility of a select few employees, who would visually gauge the amount of feed in concrete troughs. This visual inspection by humans was inherently imprecise, subjective, and inconsistent, often causing animals to eat too much or too little one day and get off their optimal growth curve or even become ill. Manabotix’s solution consists of a Septentrio AsteRx-U GNSS receiver and antenna, a lidar scanner, and an onboard processing platform.
Statistical Analysis
Integrity is a key aspect of all these applications. A part of delivering integrity is a statistical analysis called receiver autonomous integrity monitoring (RAIM), which was developed for such safety-critical applications as aviation or marine navigation. A refinement of RAIM, called RAIM+, takes this analysis to the next level as part of a larger positioning protection package.
For autonomous operation, it can be particularly hazardous to be overly optimistic about GNSS accuracy. This parameter is reported in the form of positioning uncertainty, which is the maximum possible error on the calculated position. It is especially necessary in challenging GNSS environments, where the receiver has a direct line of sight to only a limited number of GNSS satellites or where GNSS signals are degraded. RAIM alerts users when their receiver’s uncertainty strays beyond the limits they have chosen for their application.
Users can be deceived by a consistent position or movement — which can be consistently inaccurate. The positioning uncertainty gives them an indication of the extent to which they can rely on their receiver’s positioning accuracy at any given moment. The receiver operator can set an alarm limit, so that the receiver can flag situations when positioning uncertainty becomes too large.
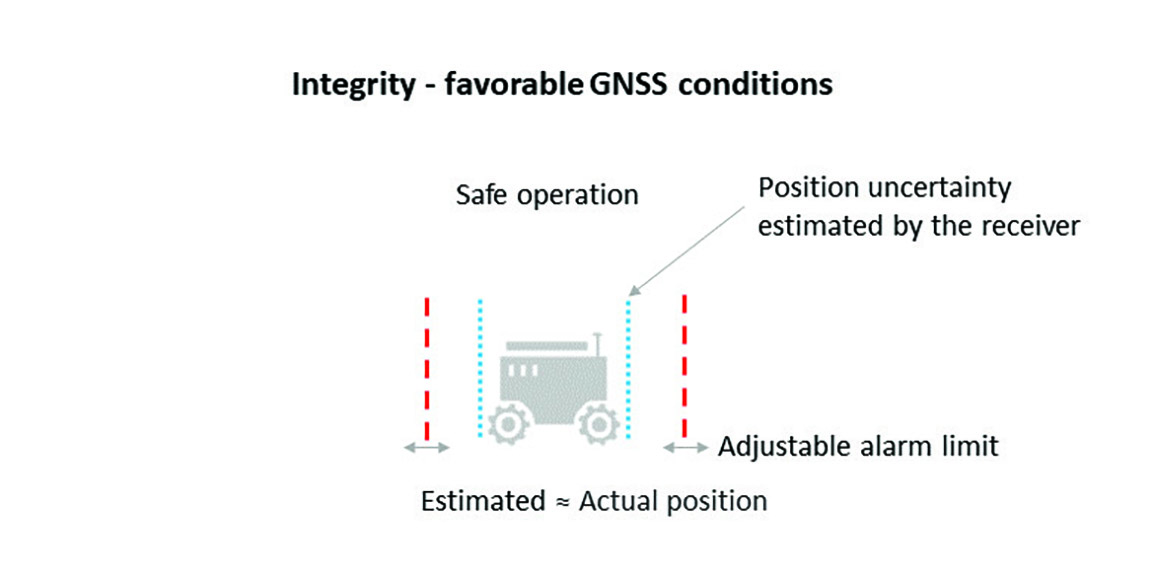
The blue line in Figure 1 shows position uncertainty estimated by a GNSS receiver under favorable conditions, when the view of the sky is unobstructed, and the receiver has a direct line-of-sight to many satellites.
Figure 1. Under good GNSS conditions, the position uncertainty shown by the blue lines is well within the alarm limits, indicating safe operation. The actual position of the receiver should always remain within the blue uncertainty boundaries. (Image: Septentrio)
During favorable conditions, the positioning uncertainty stays well below the alarm limit because the calculated position is almost the same as the robot’s actual position. However, in challenging environments, the truthfulness of positioning uncertainty becomes most critical (see Figure 2).
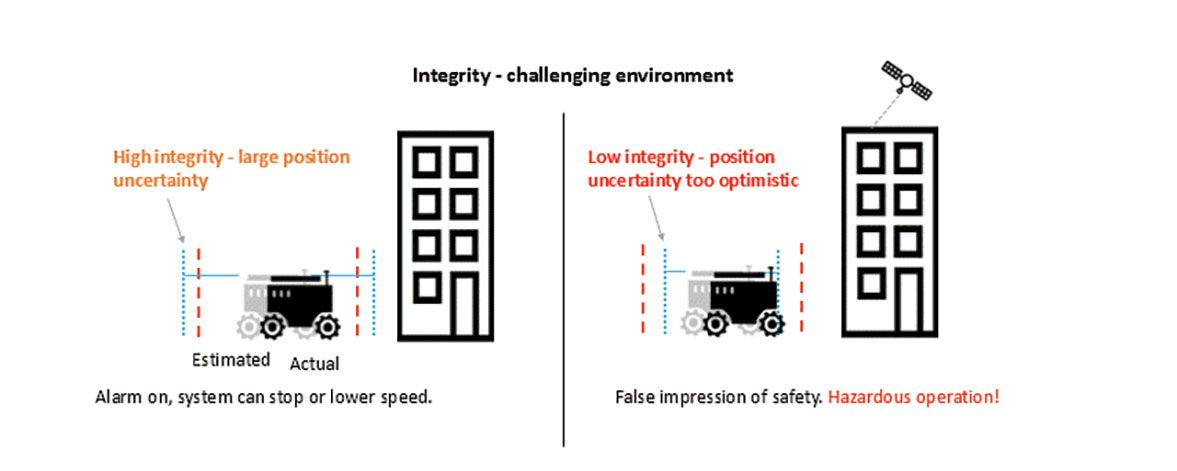
Figure 2. In challenging environments receivers with high integrity report large positioning uncertainty, flagging possible inaccuracies to the system. If the receiver is too optimistic about its accuracy, the operation becomes hazardous. (Image: Septentrio)
For instance, when the view of the sky is partially obstructed by buildings or foliage, the receiver has access to only a limited number of GNSS satellites, making it harder to calculate accurate position. In such cases the receiver must report a higher positioning uncertainty, so that the system can take adequate action such as switching to lower speeds, staying further away from predefined boundaries, or stopping.
A low integrity receiver may keep reporting an optimistic positioning uncertainty, that stays below the preset alarm limit even when the calculated position is way off from the actual position. The number may look fine, but effectively it becomes a “robot on the loose,” no longer on its planned path with a risk of damaging itself and its surroundings.
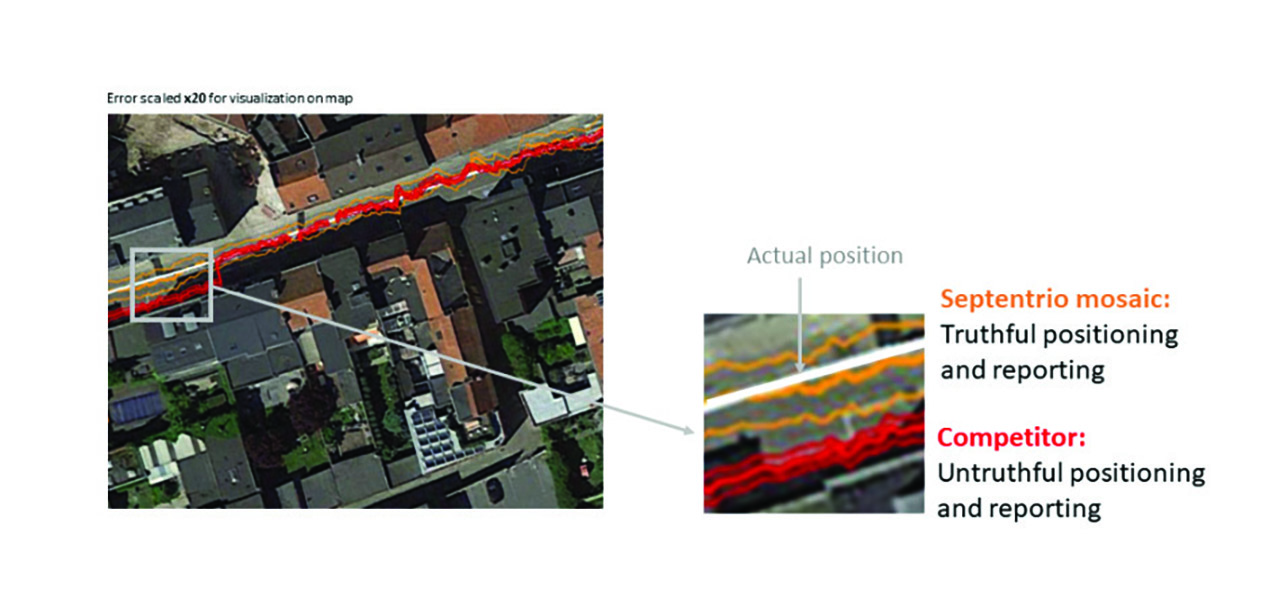
Let us look at uncertainty limits in action during a GNSS car test in an urban canyon, where the view of the sky is partially obstructed by houses (see Figure 3). The orange lines are the positioning and its uncertainty boundaries reported by a Septentrio mosaic GNSS module in the car, while the red lines are the positioning and its uncertainty boundaries reported by another popular GNSS receiver. The white line shows the actual position of the car as it drives along the road. The orange uncertainty boundaries of the mosaic receiver are truthful and somewhat wider in this challenging environment, and you can see that the actual position always remains within these boundaries. On the other hand, the red trajectory jumps off course in a certain challenging spot on the road, with the actual position no more within the uncertainty boundaries, which remain too optimistic. In this case the competitor’s receiver gives a false sense of security and the system is unaware of its hazardous operation.
Figure 3. In an urban canyon car test the Septentrio receiver reports truthful position uncertainty. A competitor receiver seems to be more accurate, while the actual position is not even within its reported uncertainty boundaries. (Image: Septentrio)
If the receiver depicted by the red line provided navigational information for an ADAS automotive system, for example, this could mislead the system into thinking that the car switched lanes. If the system then attempted to correct the trajectory by switching back to the “correct lane” this would result in taking the car off course and potentially hitting the sidewalk or even another car.
RAIM vs RAIM+
The underlying mechanism behind truthful positioning uncertainty reporting is RAIM, which ensures a truthful positioning calculation based on statistical analysis and exclusion of any outlier satellites or signals. Septentrio receivers are designed for high integrity and take RAIM to the next level with RAIM+, guaranteeing truthfulness of positioning with a high degree of confidence.
In Septentrio receivers RAIM+ is a component of a larger receiver protection suite called GNSS+ comprising positioning protection on various levels including AIM+ anti-jamming and anti-spoofing, IONO+ resilience to ionospheric scintillations, and APME+ multipath mitigation.
Septentrio has fine-tuned its RAIM+ statistical model with more than 50 terabytes of field data collected over 20 years. It removes satellites and signals which may give errors due to multipath reflection, solar ionospheric activity, jamming and spoofing, while working together with the GNSS+ components mentioned above. Because of this multi-component protection architecture, it achieves a very high level of positioning accuracy and reliability which goes well beyond the standard RAIM. The RAIM+ statistical model is adaptive, highly detailed, and complete, taking advantage of all available GNSS constellations and signals. The full RAIM+ functionality is also available in Septentrio’s GNSS/INS receiver line. User controlled parameters allow it to be tuned to specific requirements.
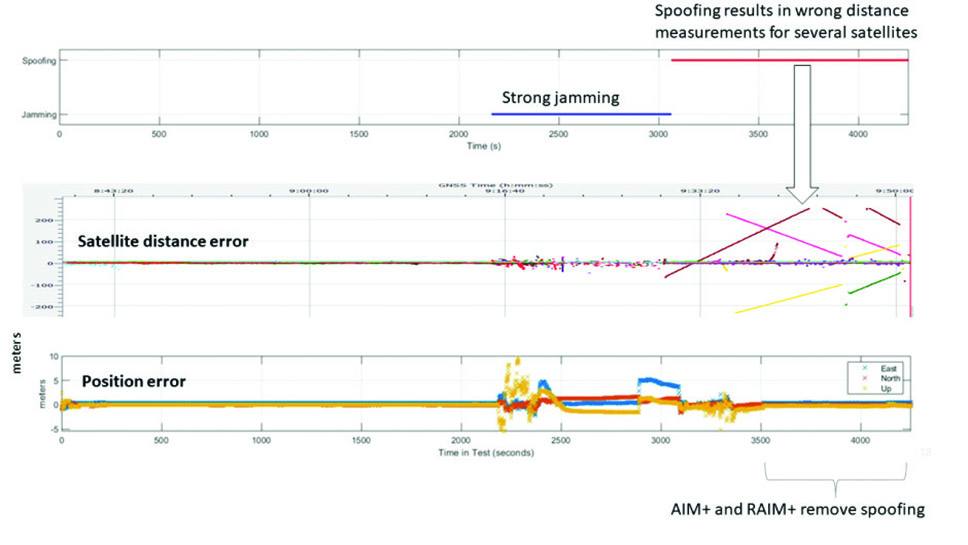
The diagram in Figure 4 shows RAIM+ in action during a jamming and spoofing attack on a Septentrio GNSS receiver. While AIM+ removes the effects of GNSS jamming, both AIM+ and RAIM+ work together to block the spoofing attack. Satellites with high distance errors, shown on the middle graph, are removed by RAIM+ since they do not conform to the expected satellite distance.
Figure 4. In this scenario jamming gives satellite distance errors but is countered by AIM+ technology. During spoofing AIM+ eliminates some of the spoofed satellites, while other satellites that have wrong distances are dismissed by RAIM+ algorithms. (Image: Septentrio)
This example shows that even in the case of jamming and spoofing, Septentrio’s high integrity receiver technology delivers truthful and reliable positioning on which any autonomous system can count.
GNSS Design Around Reliability
GNSS receivers designed to be reliable strive for high integrity in both reporting of the positioning uncertainty as well as in RAIM+ advanced statistical modelling. This ensures that these receivers provide truthful and timely warning messages and are resilient in various challenging environments. Other technologies such as inertial navigation system (INS) can also be coupled to the GNSS receiver to extend positioning availability even during short GNSS outages. Quality indicators for satellite signals, CPU status, base-station quality and overall quality allow monitoring of positioning reliability at any given time. High-integrity GNSS receivers provide truthful positioning in autonomous machines such as the SITIA weeding tractor. They are also crucial components in safety-critical applications, assured PNT and any other application where accuracy and reliability matters.
One of a small army of PhytoPatholoBots (PPB) developed by Cornell University and deployed to four grape breeding programs across the United States. These autonomous robots will roll through vineyards, using computer vision to gather data on the physiological state of each grapevine. They use a NovAtel SMART antenna. (Image: Allison Usavage / Cornell University)
One GNSS receiver widely used in autonomous ground vehicles is Hexagon | NovAtel’s SMART7 antenna. Matteo Luccio, GPS World’s editor-in-chief, discussed the product and its applications with Haley Lawrance, Senior Positioning Product Manager, Agriculture for Hexagon | NovAtel.
Luccio: “How do you differentiate your SMART antennas from your other GNSS receivers?”
Lawrance: “The reason why the SMART antenna portfolio has been so attractive within the agriculture market and to our autonomy customers specifically, has been the ease of integration and the high performance it provides. GNSS positioning is just one part of an autonomous system, and the autonomous integrators don’t necessarily have the volume of machines out of the gate that would justify the development time for them to integrate the OEM components.
With NovAtel’s SMART antennas, they only need to consider the single cable harness that will run power and communications to and from the receiver – and a single mount point on the vehicle. The SMART antennas offer a waterproof and rugged enclosure, designed to withstand the demanding environments typical for agriculture – and help accelerate our customers’ time to market.”
Luccio: “Is there some standard, as there is for cars, that enables developers of autonomous systems to easily plug your system into theirs?”
Lawrance: “We support a variety of communication protocols – serial, CAN, Ethernet, and Wi-Fi. For autonomy, Ethernet tends to be the most common option for communication with the GNSS receiver – especially when using features that require more bandwidth, such as our SPAN GNSS+INS sensor fusion solution that leverages an inertial measurement unit.
NovAtel’s_OEM7_driver, built for the Robot Operating System (ROS), is a great option because it makes it even quicker for them to integrate and allows the receiver to essentially plug-and-play into the ROS environment with minimal development. For CAN, we support both J1939 Transport and Extended Transport Protocol and NMEA 2000 if they would like to communicate onto an existing bus they are using on the vehicle.”
Luccio: “What about the ease of integration on the software side?”
Lawrance: “We have a very large library of proprietary NovAtel-formatted logs that are available in binary and ASCII, which provide flexibility and allow customers to customize a unique set of logs that provide the data they are interested in. This could be anything from information on which satellites are being used in the solution, to the roll and pitch of the vehicle, or status information from the receiver. NovAtel receivers also output in standard formats, such as NMEA 2000 and NMEA 0183, that consolidate the data that they are most likely to need, such as position, velocity, and quality indicators.”
Luccio: “What markets do your SMART antennas target?”
Lawrance: “Broadly speaking, the SMART antenna product line was designed specifically for agriculture use cases and environments. Customers include agriculture OEMs, aftermarket integrators that develop retrofit precision ag solutions, and autonomous solution providers.
Within that product line, we have SMART7 and SMART2, with different performance options that allows us to scale the best product solution for each application. For high-performance semi-autonomous or autonomous applications that need centimetre-level accuracy – even in highly variable terrain and challenging GNSS-obstructed environments, SMART7 is the best fit – together with SPAN GNSS+INS and TerraStar-C PRO Correction Services or RTK.
For additional positioning redundancy on an autonomous vehicle, SMART2 can be used together with SMART7 – meaning there are two different, independent GNSS hardware, software, and positioning solutions running in parallel. This allows autonomous machinery manufacturers to utilize both positioning solutions in parallel for an additional layer of protection.”
While on public roads self-driving cars are still years away, autonomous systems are already common in much less congested and/or much more controlled environments — such as farm fields, ports, mines, rivers, and in the air — where the risk of a collision causing injuries or fatalities is smaller by orders of magnitude. From unmanned aerial vehicles (UAVs) taking aerial photographs, to unmanned ground vehicles (UGVs) spraying vineyards, to unmanned surface vessels (USV) conducting hydrographic surveys, autonomous or semi-autonomous systems are generally much safer, more efficient, and cheaper to operate than their manned counterparts.
Whether they have wheels, hulls, or wings to properly perform their tasks, autonomous systems need to know — with great accuracy — their position, heading and attitude (roll, pitch, yaw, surge, sway, and heave). For example, to spray grapes in a vineyard, an autonomous system needs to know not only its exact position but also whether it is level or tilted to one side due to uneven terrain, lest it spray the ground or into the air instead of the grapes. Similarly, a survey vessel’s pitch, which depends on its speed through the water, and its roll, due to waves and wind, affect the direction of its sonar beams.
Knowing a platform’s position, heading and attitude requires tight integration of the outputs of GNSS receivers and inertial navigation systems (INS). This enables autonomous systems to compensate for their movements — either physically and in real time, by orienting their sensors or tools, or in software when post-processing the data they collected.
The following three case studies sample current developments in autonomous systems on land, in the air, and on the water.
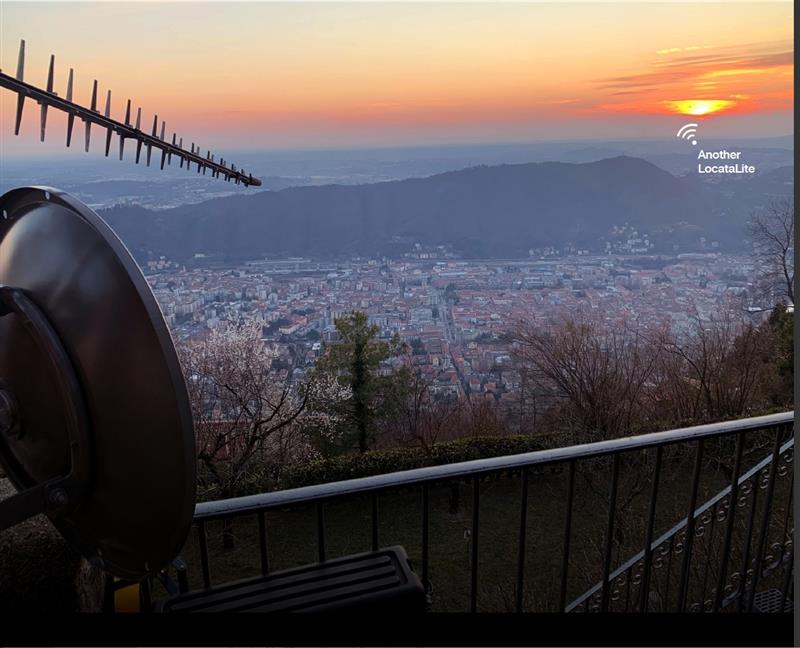
Locata dish antenna pointed back to EU’s JRC, 44 km away, just under the setting sun. The Yagi antenna above is pointed to a cell tower in Como and used to connect the system for remote control and data logging. Image: Locata
A new European Commission (EC) Technical Report, published after exhaustive and completely independent testing of several candidate A-PNT (Alternative Positioning, Navigation, and Timing) technologies, confirms that Locata has demonstrated positioning and timing performance across every test environment, delivering:
cm-level positioning accuracy in all tests, indoor and outdoor, under static and kinematic conditions
picosecond-level time transfer using Locata’s proprietary TimeLoc technology, over multiple media types including RF over distances of more than 105 kilometres and over fibreoptic and/or coaxial cables, without requiring satellites or atomic clocks.
The rigorous scientific test campaign was conducted over a period of eight months by experts from the EC’s Joint Research Centre (JRC) in Italy. Its purpose was to establish the foundations for European navigation and timing policy, including the upcoming European radio navigation plan, in the context of growing concerns about the single-point-of-failure that GPS and other Global Navigation Satellite Systems (GNSS) pose.
According to Locata, their validated capabilities promise to open previously unattainable, satellite-free A-PNT performance for autonomous vehicles, logistics, indoor positioning, critical national infrastructure, and aviation, as well as better levels of synchronization to improve mobile phone and digital data networks.
Locata’s products have been deployed commercially for a decade, delivering cm-level positioning (via sales and IP licenses) to globally recognized partners, including systems now certified for safety-of-life level operation of autonomous vehicles. Prominent government customers include NASA and the United States Air Force, which runs a large Locata network that covers more than 6,500 sq km for aviation use when GPS is being jammed or spoofed.
This performance evaluation assessment was run under a globally-open tender launched by the EC’s Directorate-General for Defence Industry and Space (DEFIS). The tender sought applications from around the world, from every potential candidate claiming they could provide “an alternative to GNSS-based PNT.” More than 30 companies applied, and this number was then down-selected by an expert panel to the seven technologies that were, in the end, independently evaluated. Locata was the only technology that was granted two contract slots, and the only technology that completed every timing and positioning test, in every indoor and outdoor environment, sought by the EU.
GNSS integrity is key to precision agriculture. (Image: fotokostic/iStock/Getty Images Plus/Getty Images)
In the world of global navigation satellite systems (GNSS), there are five key watchwords: accuracy, integrity, availability, continuity and coverage. While all five of those parameters are very important, their priority order depends on the application.
Accuracy: how well a measured or estimated position or time conforms with its true value. If you are a surveyor, accuracy and integrity are your biggest concerns. Accuracy is not to be confused with precision, which is a measure of exactness. It can refer to the number of significant digits reported for a measurement, the rigor of the measuring process, or the agreement among repeated measurements. For example, for locational error a measurement of 9.725m is more precise than 9.7m but may not be a more accurate measure of the error. A measuring instrument is precise if it repeatedly gives similar measurements, regardless of whether these are actually accurate. They could all be off by, say, 5m, due to some bias in the measurement process. In short, precise data may be inaccurate and accurate data may be imprecise.
Integrity: how much the information supplied by the system can be trusted to be correct. This requires the system to provide timely warnings to the user when the equipment is unreliable for navigation purposes—due to obstructions, jamming, multipath or any other event that degrades accuracy.
Availability: the percentage of time that a signal is available to the user. For location-based services, this and coverage are probably the most important parameters.
Continuity: the ability of the total navigation system to continue to perform its function during the intended operation. Continuity is critical whenever reliance on a particular system is high. For a pilot during an instrument approach procedure, continuity and integrity are vital.
Coverage: the area over which a signal is required. For farmers, it is their fields, for ships, the world’s oceans.
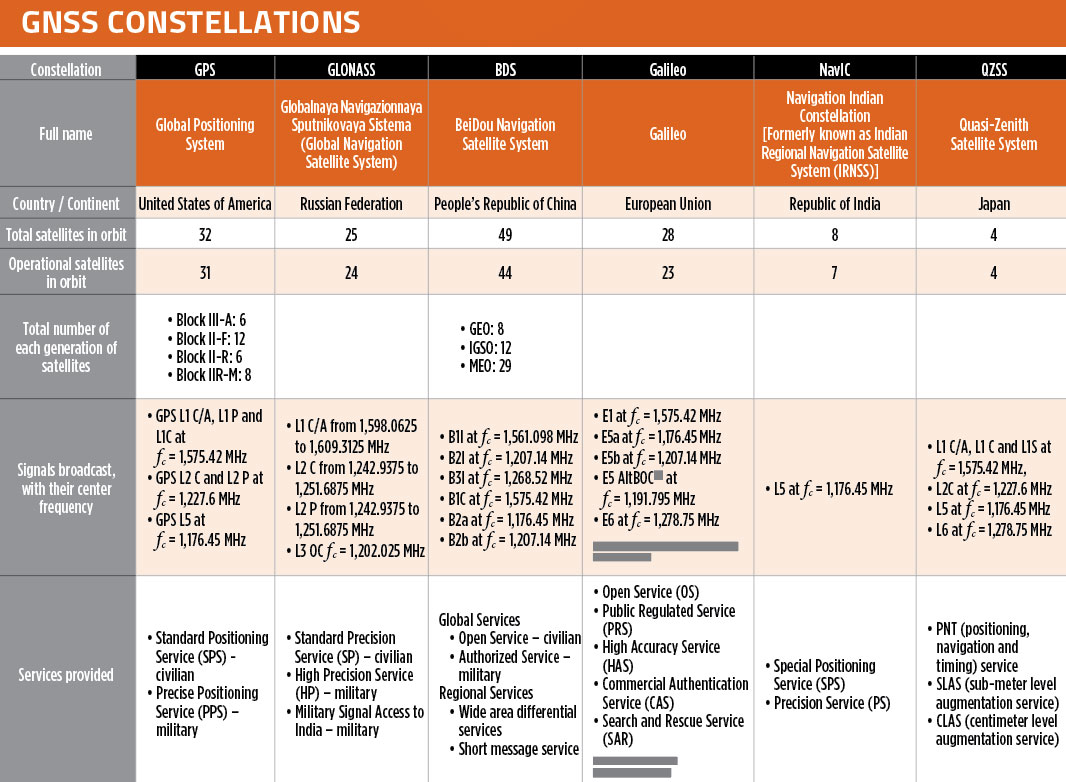
In our October 2021 issue, we celebrated the availability of four global navigation satellite system (GNSS) constellations. Below is the status (as of Feb. 23, 2023) of these four GNSS and their two regional cousins.
Many thanks to Mohamed Tamazin, Ph.D., Senior GNSS Architect for GNSS Simulation with Orolia — a Safran Electronics & Defense company, who provided or confirmed these data. While the data on GPS and Galileo are easily accessible, those for the other constellations are difficult, in some cases very difficult, to find.
What would be required for the United States to develop and deploy a GPS high-accuracy service analogous to Galileo’s HAS?
Ismael Colomina
“Galileo HAS is a particular implementation of a PPP-RTK service. U.S. companies are already providing similar fee-based services that are even more accurate than HAS. Therefore, there is no big technical challenge for the United States to provide a GPS HAS. Actually, the European Union already provides a HAS for GPS. It is more a question of strategy for GPS policy makers: which user segment to service with a HAS-like augmentation? What about other services analogous to Galileo’s OSNMA and the upcoming CAS [commercial authentication service] for resiliency purposes? In short, a HAS-like service would just require including it in the U.S. GNSS evolution roadmap.”
— Ismael Colomina GeoNumerics
John Fischer
“The challenge is probably more political than technical. The U.S. government usually refrains from competing with commercial services. The prevailing attitude in the United States is that the private sector is more efficient than the public sector. Maybe the most practical approach is for the government to provide the authentication mechanism and open access to the data required, then allow the private sector to offer services. There isn’t a pressing need for high-accuracy GPS for transportation — it needs resiliency/reliability. However, precision agriculture needs it, so maybe sponsorship from the Department of Agriculture would be more effective than from the Department of Transportation.”
— John Fischer Orolia
Mitch Narins
“When I saw this question, my first impression (as a systems engineer) was to ask ‘For whom? For what applications? For which services?’ (Positioning? Navigating? Time/frequency?) Many have concentrated on accuracy, competing in a GNSS Olympics to see who can achieve ‘the best’ position accuracy and precision (repeatability). Finally, (thanks to Logan Scott) integrity is being pushed beyond just SBAS and GBAS, and real civil authentication of signals is being pursued. I can promise nanometers/nanoseconds if I don’t have to prove it’s true. While we finally understand the need for zero trust, we must still address loss of service by establishing real complementary PNT.”
When the U.S. Air Force shot down a Chinese balloon flying at 60,000 ft (11.4 miles) on Feb. 4, the incident raised many questions about international security, international law, U.S.-China relations and technology. Among them, where is the end of a nation’s airspace — the portion of atmosphere it controls above its territory? Its horizontal boundary corresponds to that of its land border and territorial waters, which extend 12 miles out from its coastline. However, there is no international agreement on the vertical boundary.
The 1967 Outer Space Treaty — to which the United States is a party and which bans “appropriation” of outer space by any nation — omits a definition of “outer space” because none of the major powers wanted to limit their own freedom of action in space. At a United Nations meeting in Vienna in 2001, the U.S. delegation said, “Our position continues to be that defining or delimiting outer space is not necessary.”
The United Nations has historically accepted as the boundary of space the Kármán line, at an altitude of 62 miles above mean sea level. It roughly marks the altitude where traditional aircraft cannot effectively fly using lift generated by Earth’s atmosphere, because the air there is just too thin. The Fédération Aéronautique Internationale agrees with this definition.
Some countries have adopted a definition for their own legal purposes, usually based on either the Kármán line or on the altitude at which orbital flight is possible without utilizing atmospheric lift. As a courtesy, a state launching a space vehicle that will traverse another state’s territory during its sub-orbital flight will notify the overflight state.
The U.S. military and NASA on the other hand, define space to begin at 50 miles above Earth’s surface. “Pilots, mission specialists, and civilians who cross this boundary are officially deemed astronauts,” according to the U.S. Department of Commerce’s National Environmental Satellite Data and Information Service.
Escaping Earth’s atmosphere entirely is another story. It requires traveling at least 600 miles, to its outermost layer, where violent solar winds have greater sway than air. If that were the definition of space, however, the Space Shuttle (which orbited up to 200 miles up), the International Space Station (205 miles to 270 miles), active Earth observation satellites (280 miles to 500 miles), some of the National Oceanic and Atmospheric Administration’ s polar-orbiting satellites (540 miles) and most scientific satellites, including nearly all of NASA’s Earth Observing System fleet, would not be considered spacecraft! Lower orbits have significant air-drag, which requires frequent orbit re-boost maneuvers.
There’s no question that GPS satellites, orbiting at an altitude of about 12,550 miles, are in space. That is why they are acquired, sustained, and operated by the U.S. Space Force (USSF), established in December 2019 as the newest branch of the U.S. armed forces. Its mission is to organize, train and equip space forces to protect U.S. and allied interests in space and provide space capabilities to the joint force. As the USSF grows, we’ll hear more about it.
Surveying is both an ancient profession and one of today’s most technologically advanced. Surveyors are among the first on the site of a new construction project, staking out its corners and boundaries, and mapping elevation contours, as well as among the last, surveying the project “as built.” This is particularly important for features that will no longer be visible once the project is complete, such as underground utilities.
While many surveyors work in quiet, uncrowded environments — such as surveying the boundaries of farm fields — those who work on large construction projects operate among the hustle and bustle of bricklayers, carpenters, electricians, plumbers and other tradespeople, as well as cranes, backhoes and other heavy machines. This chaotic environment means that in addition to accuracy and efficiency, surveyors also are concerned with safety.
In the following cover story, a Minnesota-based construction company describes a new system it developed for surveying and mapping underground utilities. Also, professional surveyor Gavin Schrock discusses the benefits of a flexible approach to GNSS rover accuracy and of adding scanning capabilities to robotic total stations.