The Universal Software Radio Peripheral as RF Front-End
By Ningyan Guo, Staffan Backén, and Dennis Akos
The authors designed a full-constellation GNSS receiver, using a cost-effective, readily available, flexible front-end, wide enough to capture the frequency from 1555 MHz to 1607 MHz, more than 50MHz. This spectrum width takes into account BeiDou E2, Galileo E1, GPS L1, and GLONASS G1. In the course of their development, the authors used an external OCXO oscillator as the reference clock and reconfigured the platform, developing their own custom wide-band firmware.
The development of the Galileo and BeiDou constellations will make many more GNSS satellite measurements be available in the near future. Multiple constellations offer wide-area signal coverage and enhanced signal redundancy. Therefore, a wide-band multi-constellation receiver can typically improve GNSS navigation performance in terms of accuracy, continuity, availability, and reliability. Establishing such a wide-band multi-constellation receiver was the motivation for this research.
A typical GNSS receiver consists of three parts: RF front-end, signal demodulation, and generation of navigation information. The RF front-end mainly focuses on amplifying the input RF signals, down-converting them to an intermediate frequency (IF), and filtering out-of-band signals. Traditional hardware-based receivers commonly use application-specific integrated circuit (ASIC) units to fulfill signal demodulation and transfer the range and carrier phase measurements to the navigation generating part, which is generally implemented in software. Conversely, software-based receivers typically implement these two functions through software. In comparison to a hardware-based receiver, a software receiver provides more flexibility and supplies more complex signal processing algorithms. Therefore, software receivers are increasingly popular for research and development.
The frequency coverage range, amplifier performance, filters, and mixer properties of the RF front-end will determine the whole realization of the GNSS receiver. A variety of RF front-end implementations have emerged during the past decade. Real down-conversion multi-stage IF front-end architecture typically amplifies filters and mixes RF signals through several stages in order to get the baseband signals. However, real down-conversion can bring image-folding and rejection. To avoid these drawbacks, complex down-conversion appears to resolve much of these problems. Therefore, a complex down-conversion multi-stage IF front-end has been developed. But it requires a high-cost, high-power supply, and is larger for a multi-stage IF front-end. This shortcoming is overcome by a direct down-conversion architecture. This front-end has lower cost; but there are several disadvantages with direct down-conversion, such as DC offset and I/Q mismatch. DC offset is caused by local oscillation (LO) leakage reflected from the front-end circuit, the antenna, and the receiver external environment.
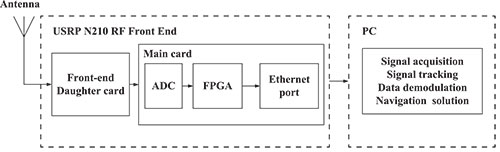
A comparison of current traditional RF front-ends and different RF front-end implementation types led us to the conclusion that one model of a universal software radio peripheral, the USRP N210, would make an appropriate RF front end option. USRP N210 utilizes a low-IF complex direct down-conversion architecture that has several favorable properties, enabling developers to build a wide range of RF reception systems with relatively low cost and effort. It also offers high-speed signal processing. Most importantly, the source code of USRP firmware is open to all users, enabling researchers to rapidly design and implement powerful, flexible, reconfigurable software radio systems. Therefore, we chose the USRP N210 as our reception device to develop our wide-band multi-constellation GNSS receiver, shown in Figure 1.
USRP Front-End Architecture
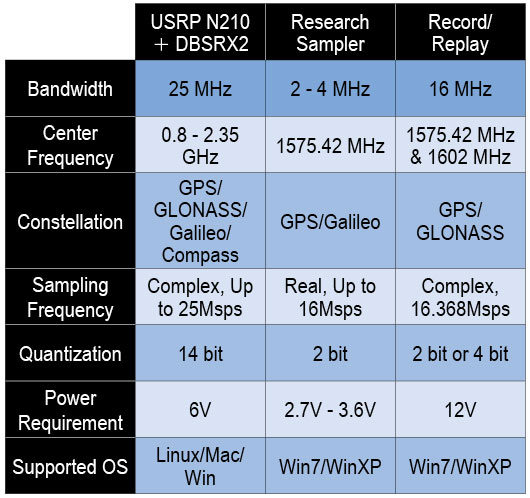
The USRP N210 front-end has wider band-width and radio frequency coverage in contrast with other traditional front-ends as shown by the comparison in Table 1. It has the potential to implement multiple frequencies and multiple-constellation GNSS signal reception. Moreover, it performs higher quantization, and the onboard Ethernet interface offers high-speed data transfer.
USRP N210 is based on the direct low-IF complex down-conversion receiver architecture that is a combination of the traditional analog complex down-conversion implemented on daughter boards and the digital signal conditioning conducted in the motherboard. Some studies have shown that the low-IF complex down-conversion receiver architecture overcomes some of the well-known issues associated with real down-conversion super heterodyne receiver architecture and direct IF down-conversion receiver architecture, such as high cost, image-folding, DC offset, and I/Q mismatch.
The low-IF receiver architecture effectively lessens the DC offset by having an LO frequency after analog complex down-conversion. The first step uses a direct complex down-conversion scheme to transform the input RF signal into a low-IF signal. The filters located after the mixer are centered at the low-IF to filter out the unwanted signals. The second step is to further down-covert the low-IF signal to baseband, or digital complex down-conversion.
Similar to the first stage, a digital half band filter has been developed to filter out-of-band interference. Therefore, direct down-conversion instead of multi-stage IF down-conversion overcomes the cost problem; in the meantime, the signal is down-converted to low-IF instead of base-band frequency as in the direct down-conversion receiver, so the problem of the DC offset is also avoided in the low-IF receiver. These advantages make the USRP N210 platform an attractive option as GNSS receiver front-end.
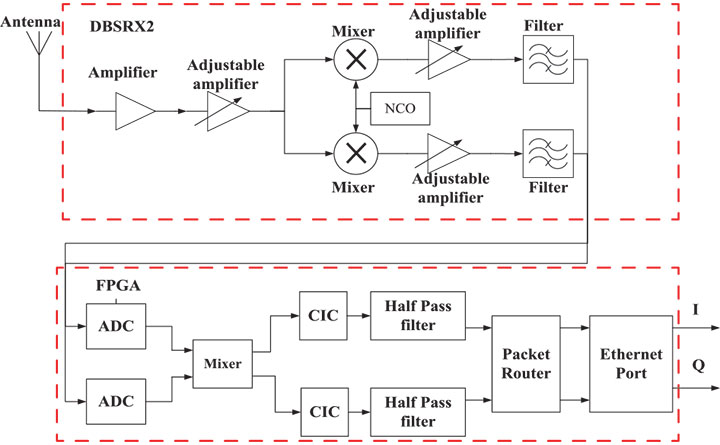
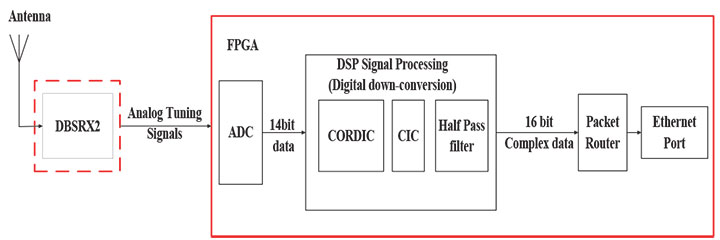
Figure 2 shows an example GNSS signal-streaming path schematic on a USRP N210 platform with a DBSRX2 daughter board. Figure 3 shows a photograph of internal structure of a USRP N210 platform.
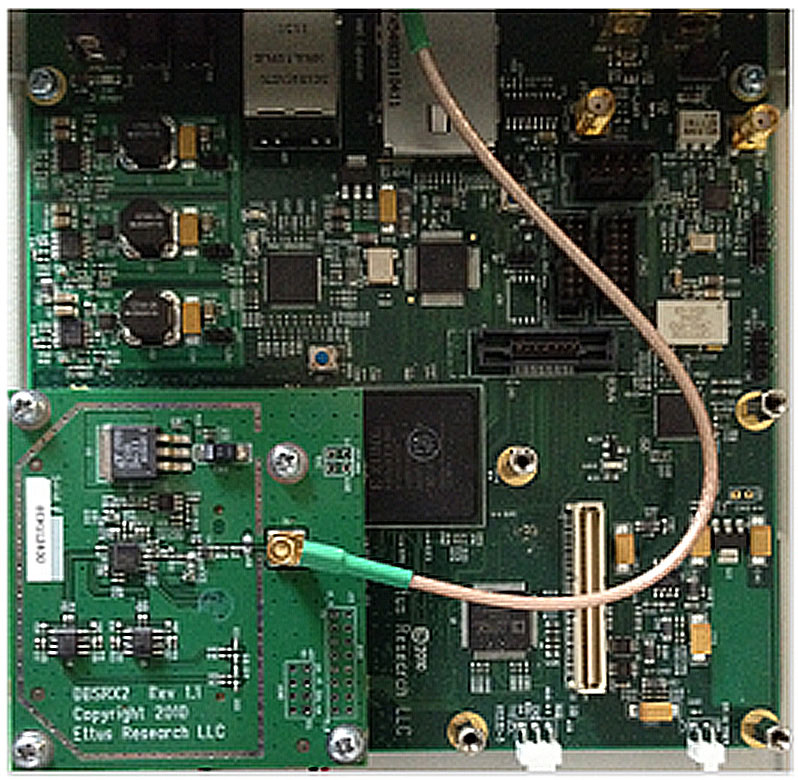
The USRP N210 platform includes a main board and a daughterboard. In the main board, 14-bit high precision analog-digital converters (ADCs) and digital-analog converters (DACs) permit wide-band signals covering a high dynamic range. The core of the main board is a high-speed field-programmable gate array (FPGA) that allows high-speed signal processing. The FPGA configuration implements down-conversion of the baseband signals to a zero center frequency, decimates the sampled signals, filtering out-of-band components, and finally transmits them through a packet router to the Ethernet port. The onboard numerically controlled oscillator generates the digital sinusoid used by the digital down-conversion process. A cascaded integrator-comb (CIC) filter serves as decimator to down-sample the signal.
The signals are filtered by a half pass filter for rejecting the out-of-band signals. A Gigabit Ethernet interface effectively enables the delivery of signals out of the USRP N210, up to 25MHz of RF bandwidth. In the daughterboard, first the RF signals are amplified, then the signals are mixed by a local onboard oscillator according to a complex down-conversion scheme. Finally, a band-pass filter is used remove the out-of-band signals.
Several available daughter boards can perform signal conditioning and tuning implementation. It is important to choose an appropriate daughter board, given the requirements for the data collection.
A support driver called Universal Hardware Driver (UHD) for the USRP hardware, under Linux, Windows and Mac OS X, is an open-source driver that contains many convenient assembly tools. To boot and configure the whole system, the on-board microprocessor digital signal processor (DSP) needs firmware, and the FPGA requires images. Firmware and FPGA images are downloaded into the USRP platform based on utilizations provided by the UHD. Regarding the source of firmware and FPGA images, there are two methods to obtain them:
- directly use the binary release firmware and images posted on the web site of the company;
- build (and potentially modify) the provided source code.
USRP Testing and Implementation
Some essential testing based on the original configuration of the USRP N210 platform provided an understanding of its architecture, which was necessary to reconfigure its firmware and to set up the wide-band, multi-constellation GNSS receiver. We collected some real GPS L1 data with the USRP N210 as RF front-end. When we processed these GPS L1 data using a software-defined radio (SDR), we encountered a major issue related to tracking, described in the following section.
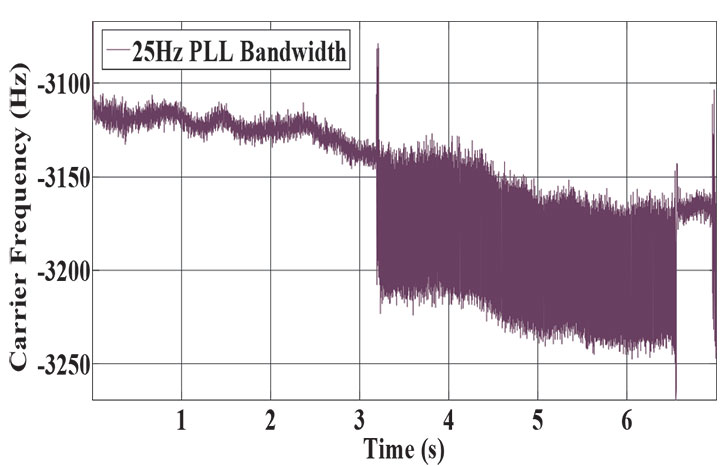
Onboard Oscillator Testing. A major problem with the USRP N210 is that its internal temperature-controlled crystal oscillator (TCXO) is not stable in terms of frequency. To evaluate this issue, we recorded some real GPS L1 data and processed the data with our software receiver. As shown in Figure 4, this issue results in the loss of GPS carrier tracking loop at 3.18 seconds, when the carrier loop bandwidth is 25Hz.
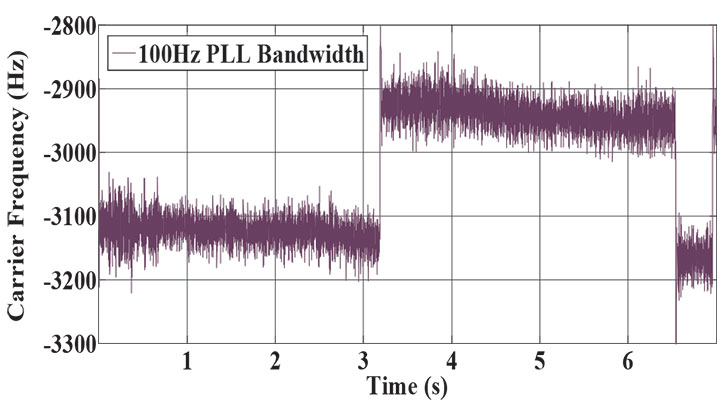
Consequently, we adjusted the carrier loop bandwidth up to 100Hz; then GPS carrier tracking is locked at the same timing (3.18s), shown in Figure 5, but there is an almost 200 Hz jump in less than 5 milliseconds.
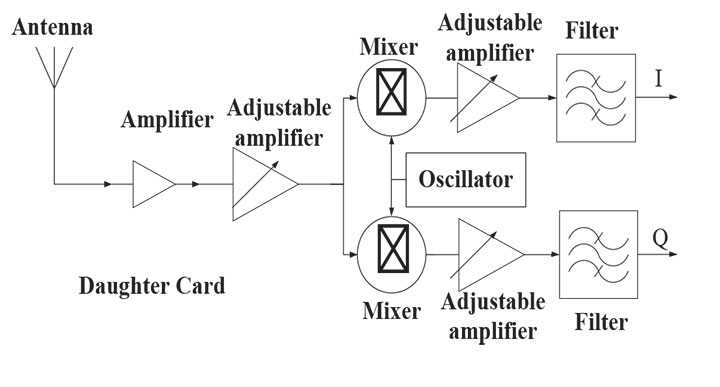
As noted earlier, the daughter card of the USRP N210 platform utilizes direct IF complex down-conversion to tune GNSS RF signals. The oscillator of the daughter board generates a sinusoid signal that serves as mixer to down-convert input GNSS RF signals to a low IF signal. Figure 6 illustrates the daughter card implementation. The drawback of this architecture is that it may bring in an extra frequency shift by the unstable oscillator. The configuration of the daughter-card oscillator is implemented by an internal TCXO clock, which is on the motherboard. Unfortunately, the internal TCXO clock has coarse resolution in terms of frequency adjustments. This extra frequency offset multiplies the corresponding factor that eventually provides mixer functionality to the daughter card. This approach can directly lead to a large frequency offset to the mixer, which is brought into the IF signals.
Finally, when we conduct the tracking operation through the software receiver, this large frequency offset is beyond the lock range of a narrow, typically desirable, GNSS carrier tracking loop, as shown in Figure 4.
In general, a TCXO is preferred when size and power are critical to the application. An oven-controlled crystal oscillator (OCXO) is a more robust product in terms of frequency stability with varying temperature. Therefore, for the USRP N210 onboard oscillator issue, it is favorable to use a high-quality external OCXO as the basic reference clock when using USRP N210 for GNSS applications.
Front-End Daughter-Card Options. A variety of daughter-card options exist to amplify, mix, and filter RF signals. Table 2 lists comparison results of three daughter cards (BURX, DBSRX and DBSRX2) to supply some guidance to researchers when they are faced with choosing the correct daughter-board.
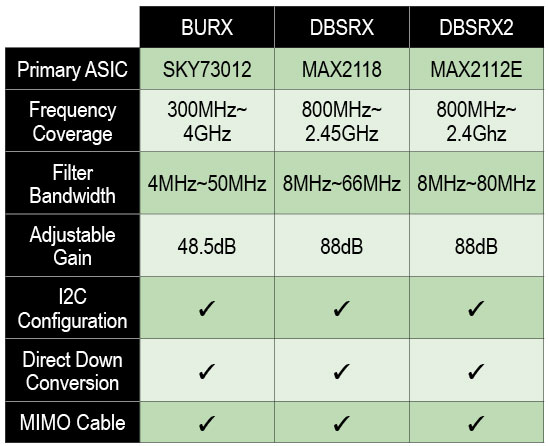
The three daughter cards have diverse properties, such as the primary ASIC, frequency coverage range, filter bandwidth and adjustable gain. BURX gives wider radio frequency coverage than DBSRX and DBSRX2. DBSRX2 offers the widest filter bandwidth among the three options.
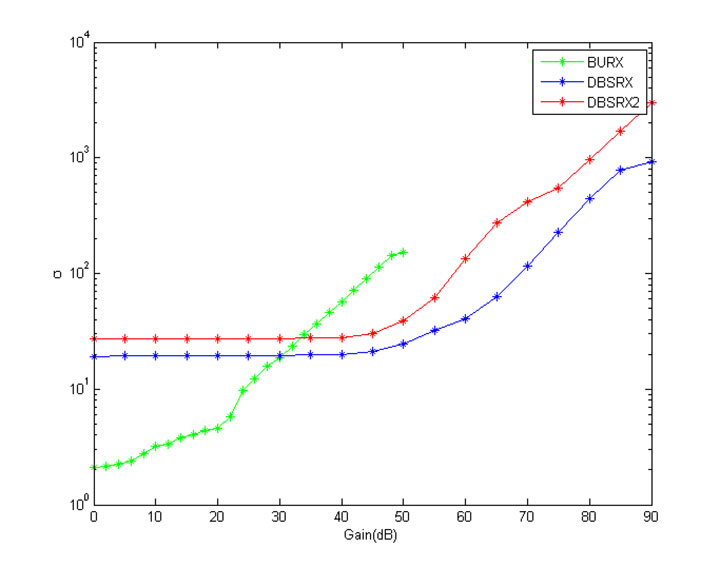
To better compare the performance of the three daughter cards, we conducted another three experiments. In the first, we directly connected the RF port with a terminator on the USRP N210 platform to evaluate the noise figure on the three daughter cards. From Figure 7, we can draw some conclusions:
- BURX has a better sensitivity than DBSRX and DBSRX2 when the gain is set below 30dB.
- DBSRX2 observes feedback oscillation when the gain set is higher than 70dB.
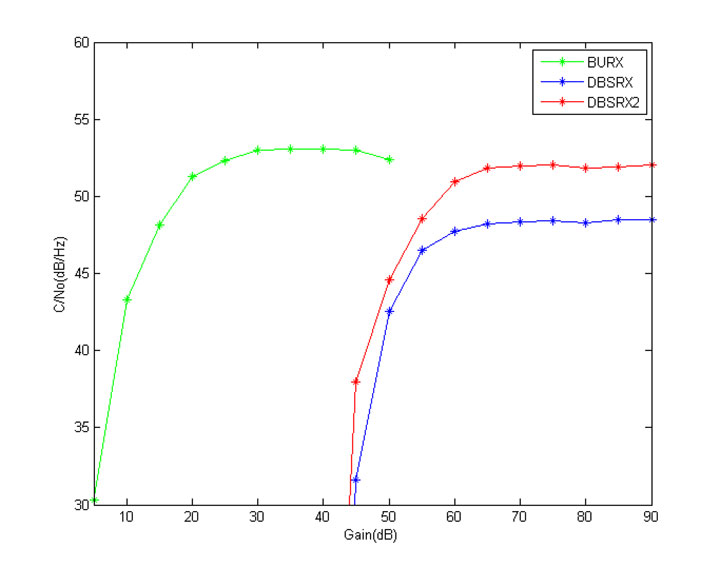
The second experimental setup configuration used a USRP N210 platform, an external OCXO oscillator to provide stable reference clock, and a GPS simulator to evaluate the C/N0 performance of the three daughter boards. The input RF signals are identical, as they come from the same configuration of the GPS simulator. Figure 8 illustrates the C/N0 performance comparison based on this experimental configuration. The figure shows that BURX performs best, with DBSRX2 just slightly behind, while DBSRX has a noise figure penalty of 4dB.
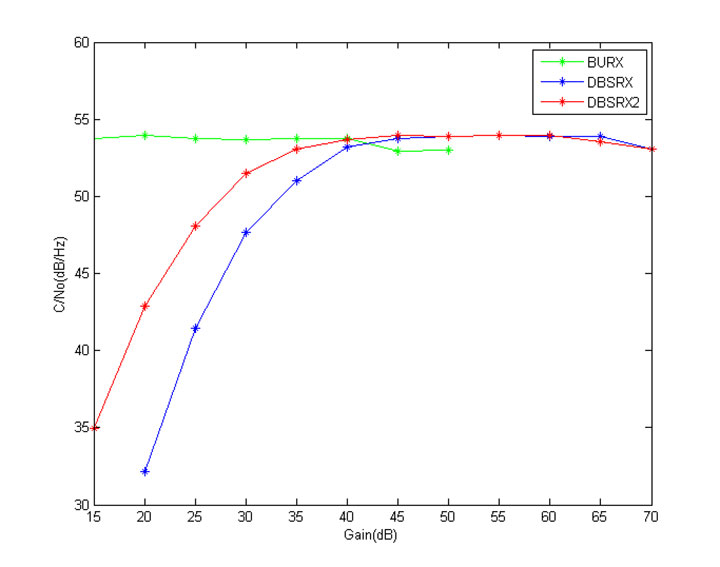
In the third experiment, we added an external amplifier to increase the signal-to-noise ratio (SNR). From Figure 9, we see that the BURX, DBSRX and DBSRX2 have the same C/N0 performance, effectively validating the above conclusion. Thus, an external amplifier is recommended when using the DBSRX or DBSRX2 daughter boards.
The purpose of these experiments was to find a suitable daughter board for collecting wide-band multi-constellation GNSS RF signals. The important qualities of an appropriate wide-band multi-constellation GNSS receiver are:
- high sensitivity;
- wide filter bandwidth; and
- wide frequency range.
After a comparison of the three daughter boards, we found that the BURX has a better noise figure than the DBSRX or DBSRX2. The overall performance of the BURX and DBSRX2 are similar however. Using an external amplifier effectively decreases the required gain on all three daughter cards, which correspondingly reduces the effect of the internal thermal noise and enhances the signal noise ratio. As a result, when collecting real wide-band multi-constellation GNSS RF signals, it is preferable to use an external amplifier.
To consider recording GNSS signals across a 50MHz band, DBSRX2 provides the wider filter bandwidth among the three daughter-card options, and thus we selected it as a suitable daughter card.
Custom Wide-band Firmware Development. When initially implementing the wideband multi-constellation GNSS reception devices based on the USRP N210 platform, we found a shortcoming in the default configuration of this architecture, whose maximum bandwidth is 25MHz. It is not wide enough to record 50MHz multi-constellation GNSS signals (BeiDou E2, GPS L1, Galileo E1, and GlonassG1). A 50MHz sampling rate (in some cases as much as 80 MHz) is needed to demodulate the GNSS satellites’ signals.
Meanwhile since the initiation of the research, the USRP manufacturer developed and released a 50MHz firmware. To highlight our efforts, we further modified the USRP N210 default configuration to increase the bandwidth up to 100MHz, which has the potential to synchronously record multi-constellation multi-frequency GNSS signals (Galileo E5a and E5b, GPS L5 and L2) for further investigation of other multi-constellation applications, such as ionospheric dispersion within wideband GNSS signals, or multi-constellation GNSS radio frequency compatibility and interoperability.
Apart from reprogramming the host driver, we focused on reconfiguring the FPGA firmware. With the aid of anatomizing signal flow in the FPGA, we obtained a particular realization method of augmenting its bandwidth. Figure 10 shows the signal flow in the FPGA of the USRP N210 architecture.
The ADC produces 14-bit sampled data. After the digital down-conversion implementation in the FPGA, 16-bit complex I/Q sample data are available for the packet transmitting step. According to the induction document of the USRP N210 platform, VITA Radio Transport Protocol functions as an overall framework in the FPGA to provide data transmission and to implement an infrastructure that maintains sample-accurate alignment of signal data. After significant processing in the VITA chain, 36-bit data is finally given to the packet router. The main function of the packet router is to transfer sample data without any data transformation. Finally, through the Gigabit Ethernet port, the host PC receives the complex sample data.
In an effort to widen the bandwidth of the USRP N210 platform, the bit depth needs to be reduced, which cuts 16-bit complex I/Q sample data to a smaller length, such as 8-bit, 4-bit, or even 2-bit, to solve the problem. By analyzing Figure 10, to fulfill the project’s demanding requirements, modification to the data should be performed after ADC sampling, but before the digital down-conversion. We directly extract the 4-bit most significant bits (MSBs) from the ADC sampling data and combined eight 4-bit MSB into a new 16-bit complex I/Q sample, and gave this custom sample data to the packet router, increasing the bandwidth to 100 MHz.
Wide-Band Receiver Performance Analysis. The custom USRP N210-based wide-band multi-constellation GNSS data reception experiment is set up as shown in Figure 11.
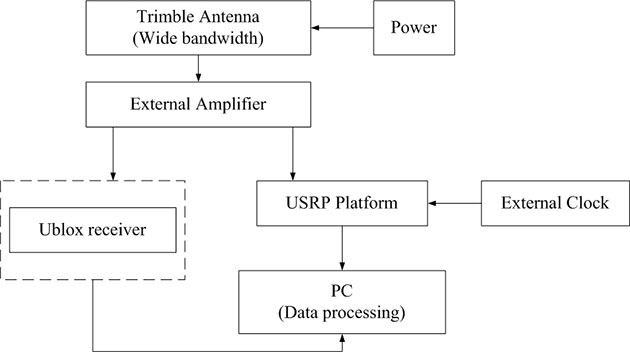
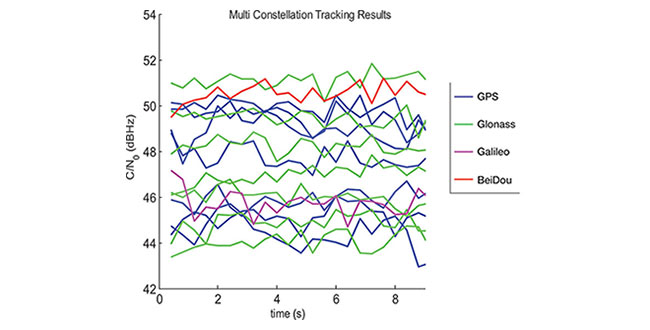
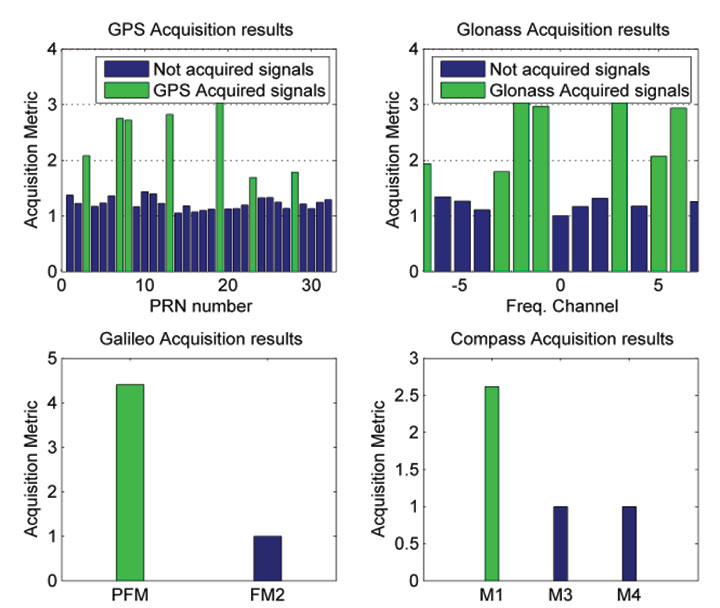
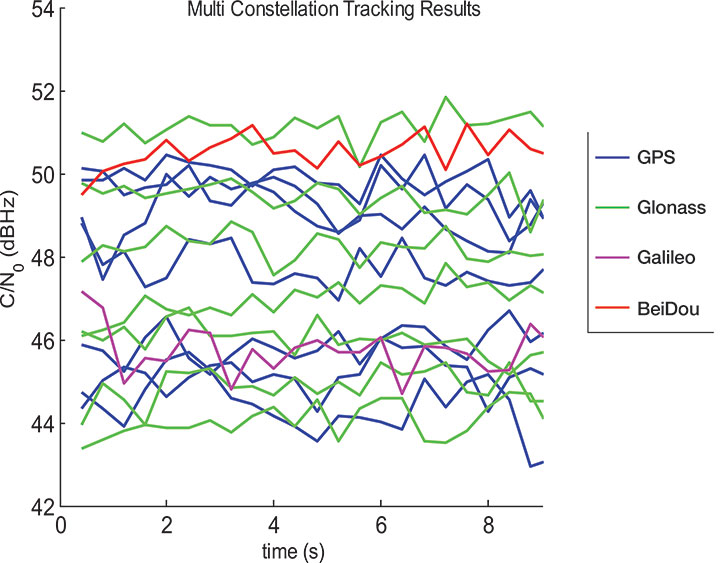
A wide-band antenna collected the raw GNSS data, including GPS, GLONASS, Galileo, and BeiDou. An external amplifier was included to decrease the overall noise figure. An OCXO clock was used as the reference clock of the USRP N210 system. After we found the times when Galileo and BeiDou satellites were visible from our location, we first tested the antenna and external amplifier using a commercial receiver, which provided a reference position. Then we used 1582MHz as the reception center frequency and issued the corresponding command on the host computer to start collecting the raw wide-band GNSS signals. By processing the raw wide-band GNSS data through our software receiver, we obtained the acquisition results from all constellations shown in Figure 12; and tracking results displayed in Figure 13.
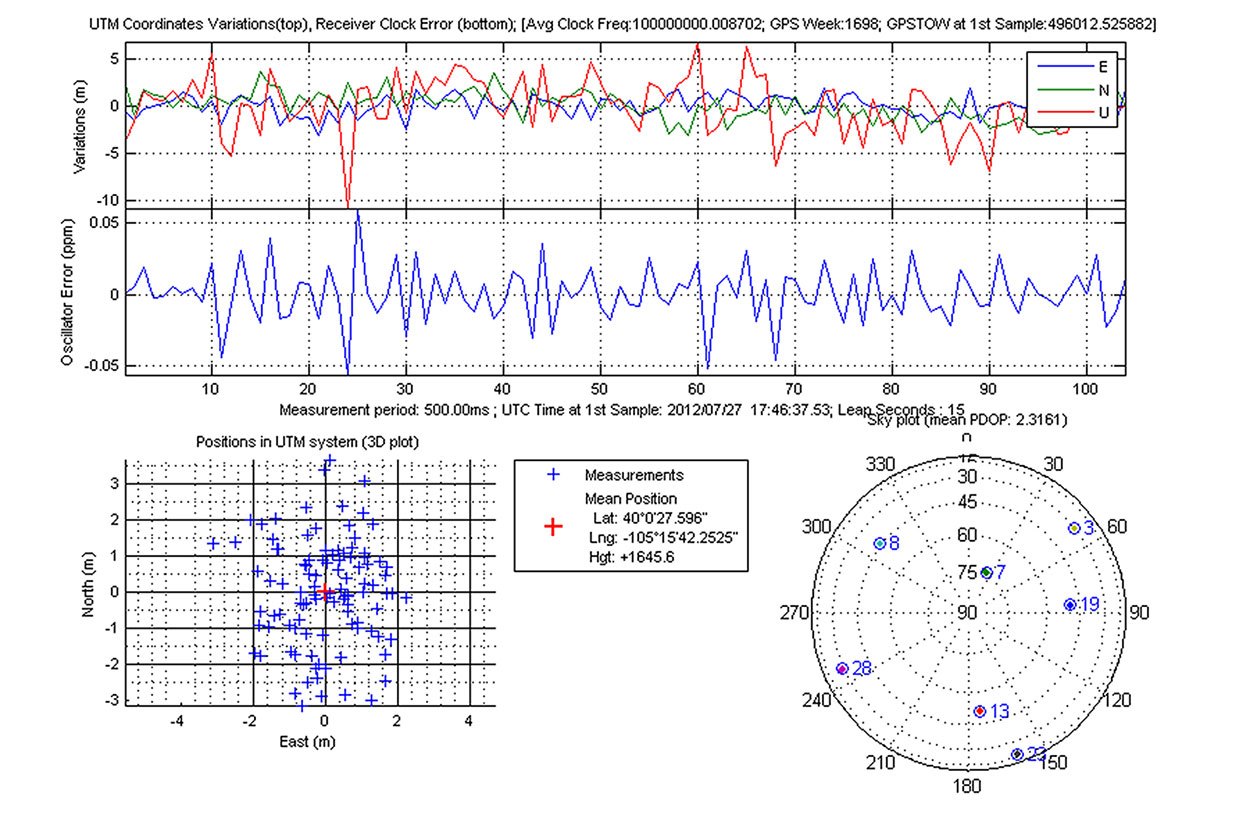
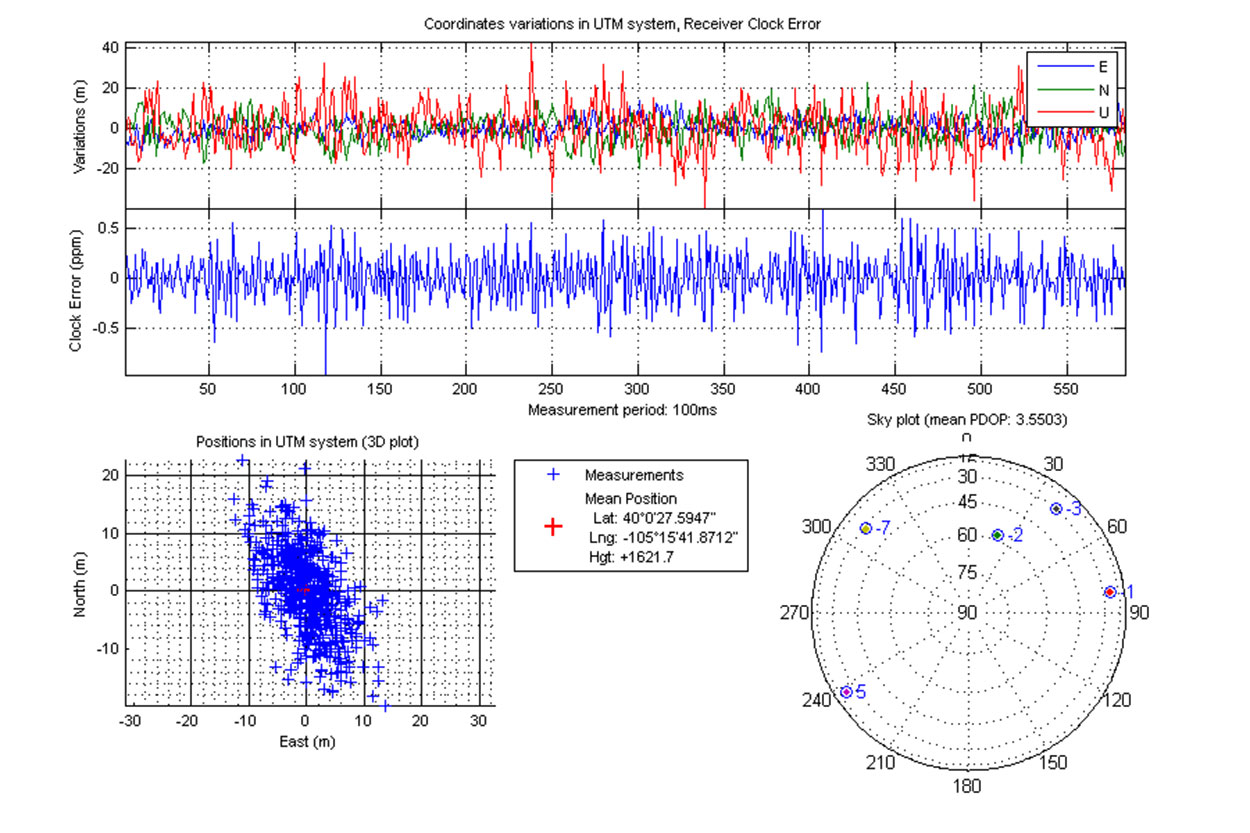
We could not do the full-constellation position solution because Galileo was not broadcasting navigation data at the time of the collection and the ICD for BeiDou had not yet been released. Therefore, respectively using GPS and GLONASS tracking results, we provided the position solution and timing information that are illustrated in Figure 14 and in Figure 15.
Conclusions
By processing raw wide-band multi-constellation GNSS signals through our software receiver, we successfully acquired and tracked satellites from the four constellations. In addition, since we achieved 100MHz bandwidth, we can also simultaneously capture modernized GPS and Galileo signals (L5 and L2; E5a and E5b, 1105–1205 MHz).
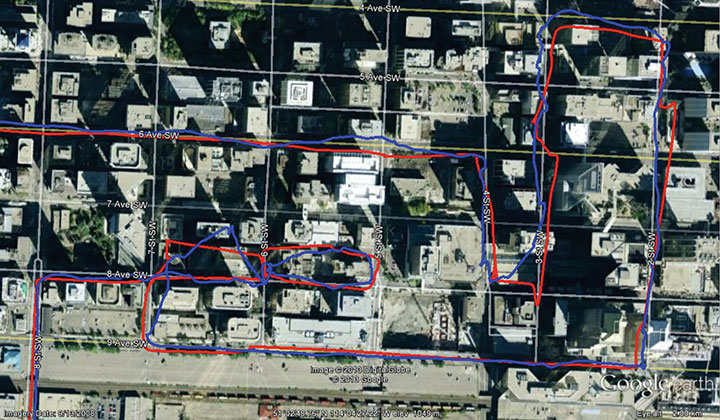
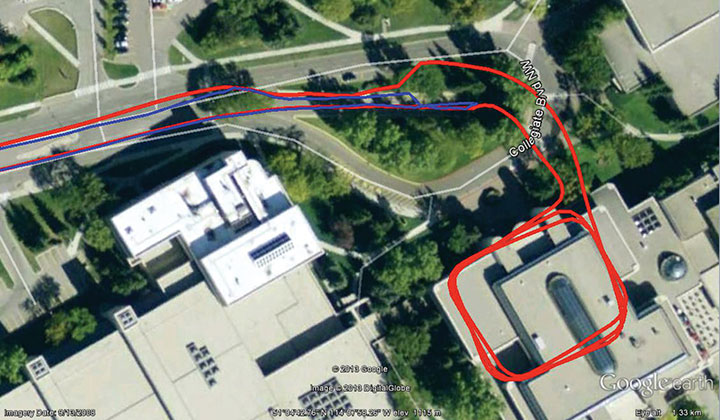
In future work, a longer raw wide-band GNSS data set will be recorded and used to determine the user position leveraging all constellations. Also an urban collection test will be done to assess/demonstrate that multiple constellations can effectively improve the reliability and continuity of GNSS navigation.
Acknowledgment
The first author’s visiting stay to conduct her research at University of Colorado is funded by China Scholarship Council, File No. 2010602084.
This article is based on a paper presented at the Institute of Navigation International Technical Conference 2013 in San Diego, California.
Manufacturers
The USRP N210 is manufactured by Ettus Research. The core of the main board is a high-speed Xilinx Spartan 3A DSP FPGA. Ettus Research provides a support driver called Universal Hardware Driver (UHD) for the USRP hardware. A wide-band Trimble antenna was used in the final experiment.
Ningyan Guo is a Ph.D. candidate at Beihang University, China. She is currently a visiting scholar at the University of Colorado at Boulder.
Staffan Backén is a postdoctoral researcher at University of Colorado at Boulder. He received a Ph.D. in in electrical engineering from Luleå University of Technology, Sweden.
Dennis Akos completed a Ph.D. in electrical engineering at Ohio University. He is an associate professor in the Aerospace Engineering Sciences Department at the University of Colorado at Boulder with visiting appointments at Luleå University of Technology and Stanford University