Successful test progresses Royal Australian Air Force’s teaming aircraft program
Boeing Australia and the Royal Australian Air Force (RAAF) successfully completed the first test flight of the Loyal Wingman uncrewed aircraft on Feb. 27.
The flight of the first military aircraft to be designed and manufactured in Australia in more than 50 years flew under the supervision of a Boeing test pilot monitoring the aircraft from a ground control station at the Woomera Range Complex in the South Australian outback.
“The Loyal Wingman’s first flight is a major step in this long-term, significant project for the Air Force and Boeing Australia, and we’re thrilled to be a part of the successful test,” said Air Vice-Marshal Cath Roberts, RAAF head of Air Force Capability. “The Loyal Wingman project is a pathfinder for the integration of autonomous systems and artificial intelligence to create smart human-machine teams. “Through this project we are learning how to integrate these new capabilities to complement and extend air combat and other missions,” she said.
Following a series of taxi tests validating ground handling, navigation and control, and pilot interface, the aircraft completed a successful takeoff under its own power before flying a predetermined route at different speeds and altitudes to verify flight functionality and demonstrate the performance of the Airpower Teaming System design.
“Boeing and Australia are pioneering fully integrated combat operations by crewed and uncrewed aircraft,” said Boeing Defense, Space & Security President and CEO Leanne Caret. “We’re honored to be opening this part of aviation’s future with the Royal Australian Air Force, and we look forward to showing others how they also could benefit from our loyal wingman capabilities.”
With support from more than 35 Australian industry teams and leveraging Boeing’s innovative processes, including model-based engineering techniques, such as a digital twin to digitally flight-test missions, the team was able to manufacture the aircraft from design to flight in three years.
This first Loyal Wingman aircraft is serving as the foundation for the Boeing Airpower Teaming System being developed for various global defense customers. The aircraft will fly alongside other platforms, using artificial intelligence to team with existing crewed and uncrewed assets to complement mission capabilities.
Additional Loyal Wingman aircraft are under development, with plans for teaming flights scheduled for later this year.
In its closing days, the Trump administration issued several new policy documents affecting positioning, navigation and timing (PNT) issues.
Some have questioned the long-term impact of these, given the significant policy differences between the previous and current administrations. Yet policies in relatively non-controversial areas such as PNT are generally developed by career personnel who tend to remain in place from administration to administration. While they must adhere to the philosophical tenets of extant elected officials, these policies tend to endure longer than others.
Even if this weren’t the case, considering the wealth of other issues the new administration is grappling with, these new policies could remain in force for some time, even if the new regime ultimately decides to change them.
Several themes run through many of the documents. These include:
Space-based PNT is vulnerable and must be protected.
The first of these late-term documents to be published was the National Space Policy issued on Dec. 9, 2020. Highlights and possible impacts for the PNT community include:
A goal to “Promote and incentivize private industry” could have implications for low-Earth orbit (LEO) PNT services.
A goal to “Increase the assurance of national critical functions” could include GPS/PNT resilience.
A pledge to “Safeguard space components of critical infrastructure” undoubtedly includes GPS. The section also has ominous statements about U.S. responses to purposeful interference and tasks the Defense and Homeland Security secretaries with having those responses ready.
Another pledge to “Maintain and Enhance Space-based Positioning, Navigation and Timing (PNT) Systems” is followed by eight explanatory paragraphs, many of which repeat previous policy. One new item is a promise to invest in detection and mitigation of harmful interference. A mention is also made of the need for multiple and diverse PNT sources, and responsible use of PNT, echoing the February 2020 Executive Order on the subject. Both of the latter two mentions were in the context of critical infrastructure and mission essential functions versus the security of the nation and economy as a whole.
Congress mandated a GPS backup technology demonstration in 2017, and $10 million was subsequently provided for that purpose. Various internal government delays resulted in the project not getting underway until March 2019. It concluded about a year later.
While some people have been critical, it is important to remember the report documents 11 vendor demonstrations, not engineering tests. Technologies were demonstrated in different locations and under differing conditions.
There is no silver bullet for meeting the nation’s needs. It must be a system of systems.
Also, the amount of effort and equipment in the demonstrations depended in some cases upon infrastructure available and the amount of money the government and vendors were able to spend. This meant that at least one technology was “demonstrated” mostly by explaining the concept, and other vendors were able to only partially demonstrate their technologies.
All of that said, the report offers valuable information about how America should make its national PNT much more resilient and reliable. First, it reinforces DOT’s message that there is no silver bullet for meeting the nation’s needs. It must be a system of systems. Second, the report goes further and says what that system of system should look like: “Those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber-optic time services to transmitters/control segments.”
From a policy perspective, this is a huge step forward. It resolves previous ambiguity and positions the nation to establish a resilient PNT architecture, one that will do more than be a “GPS backup.” It will be an architecture that will better support current applications and better enable emerging ones like autonomy, 5G and “NextG.”
Published one hour and fourteen minutes before the end of the administration on inauguration day, this plan was mandated as part of the February 2020 Executive Order on responsible use of PNT. By taking a comprehensive look at how we can do better, it provides an interesting outline of the challenges associated with America’s current over-reliance on GPS. While not a policy or directive document, it does suggest two or three departments and agencies that might be tasked with addressing each challenge.
It also addresses the need for interference detection and monitoring, and diverse sources of PNT.
This directive was published five days before the end of the administration and replaced the previous policy, 2004’s NSPD-39.
While the old policy calls for performance monitoring of GPS signals, the new one also has investment in interference detection and monitoring as a goal.
Perhaps the most significant change in the new policy was the absence of the words “backup capability” and the lack of a mandate for DOT to lead its establishment. Yet the policy hammers home multiple times the need for more than GPS as a source of PNT. And it doesn’t abandon the idea of government involvement in making that happen.
In addition to reinforcing Executive Order 13905 on responsible use of PNT, the directive defined a new (for presidential policies) term. “Alternative PNT Service” was described as “a PNT service that has the capability to operate completely independent of, or in conjunction with, other PNT services.” The directive goes on to say that “Multiple, varied PNT services used in combination may provide enhanced security, resilience, assurance, accuracy, availability and integrity. An alternative PNT service allows a user to transition from the primary source of PNT signals in the event of a disruption or manipulation.”
And while the policy does not say the government will establish or support an alternative PNT service, it comes pretty close. One of its goals is “Invest in… as appropriate, alternative sources of PNT for critical infrastructure, key resources, and mission-essential functions.”
It goes on to task the departments of Defense, Homeland Security and Transportation with making that happen.
So “backup” is out, “alternative PNT” is in. We agree words are important and are happy to have the new words. Let’s hope the new administration will match the new words with action (as appropriate).
The Frontier Precision 2021 TechXpo User Conference takes virtual its popular and informative in-person user conferences, sponsored by Frontier Precision for the past two decades. The conference will take place March 30-April 1, 11 a.m. to 5.pm. Central Daylight Time.
During the 2021 TechXpo, participants can engage in more than 70 webinars, live question-and-answer sessions, daily prizes and a virtual trade show with more than 15 industry vendors such as Trimble, DJI, Yellowscan and more.
Participants will learn new ways to measure, with a wealth of knowledge to be learned and shared, the company said.
“We’ve continued to take our core values of customer service and training, and be the first to bring new technology to the customer as a basic part of our DNA as a company,” said Dennis Kemmesat, Frontier Precision president and CEO.
The virtual conference is highly interactive, making information and technology accessible from a desktop whether in another city, another state, or somewhere on the other side of the world.
The three-day conference will explore the best technology from the engineering, land survey, geospatial information systems (GIS), construction and unmanned aerial system (UAS) industries.
The $49 registration includes 30-day access to recordings.
About Frontier Precision. Frontier Precision is an employee-owned company with 33 years of experience serving survey, mapping, engineering, construction, GIS, forensics, law enforcement, forestry, water resources, mosquito and vector control, and natural resources professionals.
As one of the top Geospatial Trimble dealers in the world, Frontier Precision has been at the forefront of technology. The company provides business solutions in the areas of UAS/drones, laser-based scanning, 3D visualization and virtual reality.
The company is headquartered in Bismarck, North Dakota, with locations in South Dakota, Minnesota, Colorado, Montana, Idaho, Oregon, Washington, Alaska and Hawaii.
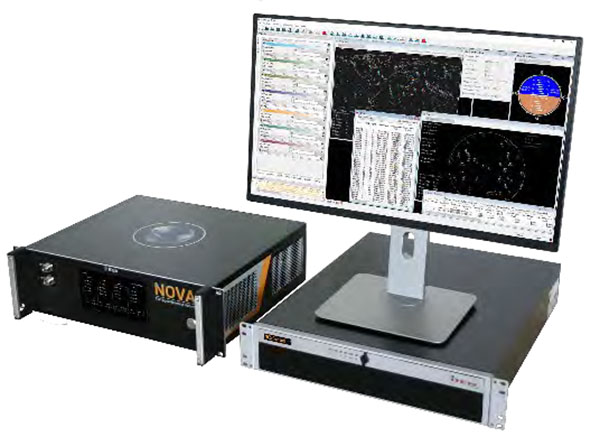
New Galileo OS SIS ICD V2.0 is now fully supported by IFEN’s NCS Nova GNSS simulator
Photo: IFEN
IFEN GmbH, a manufacturer of GNSS navigation test products and services, announced that its NCS Nova GNSS simulator now fully supports the simulation of Galileo Open Service (OS) signal improvements based on the new Galileo OS SIS ICD V2.0.
The NCS Nova GNSS simulator is a high-end, powerful and easy-to-use satellite navigation testing and R&D device. It is fully capable of multi-constellation and multi-frequency simulations for a wide range of GNSS applications. It provides multiple GNSS frequencies in one box.
A key enhancement to the NCS Nova GNSS simulator is comprehensive support of new Galileo OS signal message improvements on E1B. By enabling real-time simulation of the Galileo OS message improvements, the NCS Nova GNSS Simulator expands the user’s Galileo signal capability.
The NCS Nova GNSS simulator will, in future, also fully support the new Galileo E1B OS-Navigation Message Authentication (OS-NMA) and Galileo E6B High Accuracy Service (HAS) capabilities.
The GNSS simulator enhancements were developed through ESA’s Navigation Innovation and Support Programme (NAIVSP) Element 2, within the project STX2G.
“Through a simple software update, NCS Nova GNSS Simulator customers can automatically generate the new Galileo signal capabilities,” said Günter Heinrichs, head of Client Solutions at IFEN. “Adding Galileo OS signal improvement support to our NCS Nova GNSS simulator comes at the perfect time given the recent release of the Galileo OS SIS ICD V2.0 specification.”
In separate letters to the Office of Management and Budget (OMB) and new Secretary of Transportation Buttigieg, influential members of Congress have urged the Biden administration to take prompt action and establish a backup timing capability for GPS.
Danger and Benefits, Solution in Hand
On March 1, Republican representatives Sam Graves and Bob Gibbs wrote to the acting OMB director citing the dangers of not having a backup, and the benefits one would bring. Graves is the ranking member of the House Transportation and Infrastructure Committee.
Calling backup timing for GPS “important telecommunications infrastructure,” they said the capability is essential. Without a backup “… it is not a question of if our transportation, financial, and telecommunications infrastructure systems will fail, it is a question of when.”
After describing some of the threats to GPS, they observed that America will suffer from an outage more than many of its adversaries. Russia and China were cited as examples of nations that already have terrestrial backup systems for space-based PNT.
The letter to OMB also cited the benefits to safety, autonomous and intelligent transportation systems, along with “5G & Future Telecommunications.” GPS interference has led to a near crash of a commercial passenger aircraft, drone accidents, and allowed white-hat hackers to force cars off the road. The letter also referenced a report by the Alliance for Telecommunications Industry Solutions (ATIS) calling for a national timing solution to complement GPS. Such a solution would “…allow faster 5G implementation and enable it to reach more Americans.”
Graves and Gibbs also mentioned the Department of Transportation’s (DOT) January report to Congress on its GPS Backup Technology Demonstration. The report called for an architecture that included signals from space in the L band, terrestrial broadcasts in the Ultra High Frequency and Low Frequency spectra, and a fiber backbone to synchronize and feed precise time to terrestrial transmitters.
Studies and Broken Promises
By contrast, a letter signed by Democratic House members focused on decades of administration studies, a broken promise, and failure to follow the law.
Transportation and Infrastructure Committee Chair Peter Defazio, along with Representatives Garamendi and Carbajal, wrote to DOT Secretary Buttigieg on Feb. 25. The letter noted that the need for a GPS backup was first identified in a 2001 DOT report. Since then, “…there have been over 18 studies and recommendations by the Federal Government calling for a land-based, wireless nationwide backup system.” Also mentioned were comments in 2014 by DHS officials calling the nation’s over-dependence on GPS “a single point of failure” for critical infrastructure.
Congress was encouraged in 2015 when the Obama administration said it would establish an eLoran timing system and follow it with a broader approach to GPS vulnerability. “This well-reasoned approach gave Congress encouragement that this national security problem would finally be addressed.”
“However, in 2018, after no additional action was taken, Congress took responsibility to codify the commitments outlined in the 2015 letter, and on a nearly unanimous bipartisan basis in both Houses, passed the National Timing Resilience and Security Act (NTRSA) to implement the land-based timing back-up system.”
The letter also notes that Congress further nudged the administration on this issue in last year’s appropriations. The act for 2021 provided funding for six new DOT staff positions to support the project and directed the department to make the hires.
Timing and Positioning
Observers say that it is almost certain the capabilities implemented to satisfy the terrestrial timing requirement in NTRSA will also provide a positioning capability independent of GPS.
NTRSA requires DOT to “… incorporate the recommendations from any GPS back-up demonstration program” into the solution set. The combination of technologies recommended by the demonstration report will provide users one or more terrestrial services from which location can be derived.
Also, mobile devices must know their locations to use wireless timing signals. Location information independent of space-based signals is needed to provide these users resilient timing service.
IoTeX has selected Nordic Semiconductor’s nRF9160 low-power System-in-Package (SiP) with integrated LTE-M/NB-IoT modem and GPS receiver to provide the cellular internet of things (IoT) connectivity for its Pebble Tracker.
The Pebble Tracker provides trusted location, environment and motion-tracking data for global asset tracking and industrial supply chain applications.
Critical features strengthen security from hacking and data corruption, meeting the demand of applications that require strong data security and integrity protection throughout the supply chain, the company said.
There are two versions of Pebble Tracker. The first targets blockchain and IoT developers, while a second commercial version is designed for the asset tracking and industrial supply chain markets.
The product combines an environmental sensor, a motion sensor (gyroscope and accelerometer) and an ambient light sensor. It enables cellular network connectivity and integrated GPS support in a global version supporting precise, long-range tracking of asset data using established cellular infrastructure.
The nRF9160 syncs with the IoTeX blockchain, enabling large-scale, decentralized asset-tracking applications. It sends environmental and GPS data securely across global cellular networks to blockchain-based backend services and applications. There, the data is used to determine whether smart contracts have been satisfactorily fulfilled. For example, the trusted tracker data can reveal if, when, and where an asset has been mishandled.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
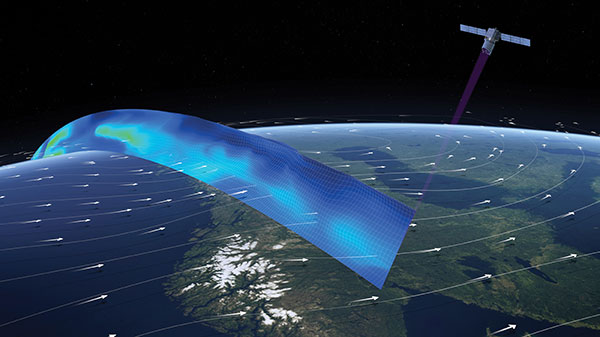
Image: ESA
Caught in a vortex
This winter’s polar vortex blasted the northern hemisphere. Understanding the vortex is the mission of the European Space Agency’s Aeolus satellite. Sudden stratospheric warming can disrupt the vortex, as it did this winter, causing the strong wind around the edge of the polar vortex to weaken or reverse (the processes involved are not fully understood). Aeolus emits short, powerful pulses of ultraviolet light from a laser and measures the Doppler shift from the light scattered back to the instrument from molecules and particles to deliver profiles of the horizontal speed of the world’s winds.
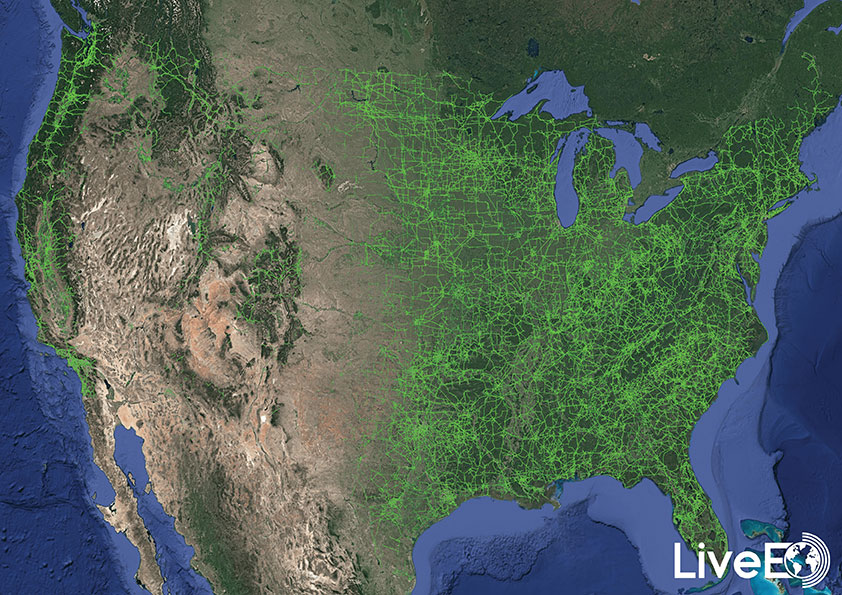
Image: LiveEO
Encroaching vegetation
For the first time in history, according to Berlin-based start-up LiveEO, vegetation encroachment risk to the U.S. transmission grid has been analyzed from space. LiveEO used more than 15,000 satellite images to evaluate risk to 574,000 miles of electricity lines. The analysis covers the detection of vegetation along transmission corridors, as well as identification of grid segments exposed at dangerously close distances. Globally, vegetation causes up to 56% of externally triggered power interruptions.
Photo: Motional
What happens in Vegas
The Hyundai-Aptiv joint venture Motional in February tested its vehicles without safety drivers in Las Vegas. The tests came less than three months after the company received the green light from the state of Nevada to test its vehicles without a human safety driver. The vehicles navigated intersections, unprotected turns and interactions with pedestrians and cyclists. A Motional employee rode in the passenger seat and was capable of stopping the vehicle if needed.
A roundup of recent products in the GNSS and inertial positioning industry from the March 2021 issue of GPS World magazine.
OEM
GNSS Receiver
1-cm accurate multi-band receiver
Photo: SkyTraq
The PX1122R is a 12 x 16 millimeter multi-band real-time kinematic (RTK) receiver for centimeter-level-accuracy positioning applications. It uses GPS L1/L2C, Galileo E1/E5b, GLONASS L1/L2 and BeiDou B1I/B2I signals concurrently to maximize positioning availability even in difficult urban environments. A single-chip system-on-chip, the PX1122R is designed to deliver reliable positioning for autonomous unmanned ground or aerial vehicles, the internet of things, and traditional land surveying and precision farming applications. It has an RTK initialization time under 10 seconds and a maximum update rate of 10 Hz. Its update rate provides in-time positioning with a fast response time and improved guidance for fast-moving applications. Moving-base RTK for GNSS precise heading is also supported.
SkyTraq, www.skytraq.com.tw/homesite/
Iridium antennas
Available housed or embedded
Photo: Tallysman
The housed HC610 and embedded HC610E active Iridium antennas operate in receive-only mode and enable Iridium terminals to be installed tens of meters away from the antenna. The lightweight and compact helical antennas are designed to receive the Iridium Satellite Time and Location (STL) signals. Both antennas are light and compact and feature a precision-tuned helical element that provides an excellent axial ratio and operates without a ground plane. They feature a low-current, low-noise amplifier (LNA) and pre-filter to prevent harmonic interference from high-amplitude signals, such as 700-MHz band LTE and other nearby in-band cellular signals. The housed HC610 weighs 23 grams, is 33 x 54.2 mm, and features an IP67 robust, military-grade plastic enclosure, with a base-mounted male SMA connector and two screw holes for surface attachment. At 10 grams, the embedded HC610E is 27.5 x 38.7 mm and can be installed in a custom enclosure. It provides a base-mounted female MCX connector. An optional embedded helical mounting ring is available to attach the antenna to a flat surface.
Tallysman Wireless, tallysman.com
Receiver front end
Designed for portable receivers
Photo: STMicroelectronics
The BPF8089-01SC6 GNSS receiver front end integrates the impedance-matching and electrostatic discharge protection circuitry typically implemented using discrete components. It provides a 50-ohm matched interface between the receiver’s antenna and LNA, and is ready for plug-and-play with the company’s STA8089 and STA8090 LNAs. It is suitable for use in portable receivers for the GPS, Galileo, GLONASS, BeiDou and QZSS constellations, which can be used in applications such as consumer satellite navigation, radio base stations, drones and tracking of assets or livestock.
STMicroelectronics, st.com
GNSS/INS board
Enhanced with an inertial measurement unit
Photo: Bynav
The Bynav A1 is a compact GNSS OEM board with a highly integrated tactical-grade inertial measurement unit (IMU) on board. With Bynav’s new-generation RTK algorithm engine and deeply coupled GNSS/INS algorithm engine, the A1 can provide continuous, reliable high-precision positioning, 3D attitude and velocity to applications such as autonomous driving, robotics, UAVs and mobile mapping. Weighing 25 g and measuring 46 x 71 millimeters, the credit-card-sized A1 is easy to integrate into any system while providing enhanced connection options including serial, Ethernet and CAN.
Bynav Technology, bynav.com
SURVEYING & MAPPING
GNSS/IMU receiver
With tilt compensation
Photo: ComNav
The N5 IMU RTK receiver is user-friendly, with up to 60° tilt compensation ensuring quick measurement and precise position acquisition. A combination of high-end inertial measurement unit (IMU) and advanced GNSS real-time kinematic (RTK) technology, along with ComNav’s core algorithm, ensures high accuracy of less than 2.5 cm, making surveying and mapping in difficult environments easier. The N5 receives all current and future GNSS signals: GPS, GLONASS, BeiDou, Galileo and SBAS. The high-quality OLED display with sunlight readability provides clear viewing and allows users to handle all surveying operations on the screen. A 6800mAh Li-battery allows more than 15 hours of continuous work.
ComNav Technology, www.comnavtech.com
Point creation software
Imports/exports layout files
Photo: Topcon
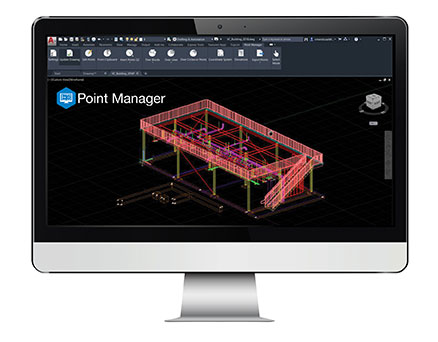
Topcon Point Manager software is available as a plug-in for Autodesk AutoCAD and Autodesk Revit users in the United States and Canada. It automates point creation and imports and exports layout files to and from a robotic total station. Users will be able to access the solution as a plug-in component to their design package, creating multiple points on building information modeling (BIM) objects and 2D/3D drawings from within the Autodesk environments. Quality assurance and control efforts are improved with point and deviation reports, a likely reduction in on-site personnel, and avoidance of costly errors. Topcon MAGNET users can wirelessly send points to the field for layout, and completed layout files can be sent back to the office to update the model to match as-built conditions.
Topcon, topcon.com
Paving control platform
Directly references design
Screenshot: Trimble
The Trimble Roadworks 3D Paving Control Platform is an accurate, automatic 3D screen control system. It can improve paving productivity and rideability by directly referencing the design rather than a surface or stringline to minimize asphalt usage, reduce waste and overruns, enabling users to finish projects on time and under budget. The Android-based application runs on the 10-inch touchscreen Trimble TD520 display. Operators can personalize the interface to match their workflows, and configurable views make it easier to see the right perspective. The software uses components from Trimble Earthworks, and users can download third-party applications.
Trimble, trimble.com
RTK Receiver
Out-of-the-box features
Photo: Emlid
The Reach RS2 is a full-featured multi-band RTK receiver. All of its features are available out of the box, along with a survey app for iOS and Android. The Reach RS2 tracks L1/L2 bands on GPS, GLONASS and BeiDou, and L1/L5 on Galileo, and acquires a fixed solution in seconds. It achieves centimeter-level precision for surveying, mapping and navigation, and maintains robust performance even in challenging conditions. Centimeter accuracy can be achieved on distances up to 60 km in RTK and 100 km in PPK mode. It provides up to 22 hours of autonomous work when logging data and up to 16 hours as a 3G rover, even in cold weather.
Emlid, emlid.com
Total stations
Integrate with GNSS
Photo: Sokkia
The iX-1200 and iX-600 robotic total stations are designed to be a part of a workflow solution for survey and layout in construction and infrastructure. They’re engineered for integration with field controllers, software and GNSS receivers. Users can switch to total station measurement integrated with GNSS through an optional upgrade. The stations also can be seamlessly integrated into BIM workflows.
Sokkia, sokkia.com
UAV
Thermal Payload
High-resolution gimbaled dual-thermal zoom
Photo: FLIR
The FLIR Vue TZ20 plug-and-play payload is fully integrated with the DJI V2 Matrice 200 and 300 series airframes. With 20X zoom capabilities, the FLIR Vue TZ20 provides drone pilots from the public safety and industrial inspection sectors with improved image detail and magnification to assess situations and make critical decisions. The 2x to 20x zoom provides a wide 95-degree field of view for maximum situational awareness, covering large areas in a single flight, or a narrow 18-degree field of view to put more pixels on target when needed. Factory calibrated, the dual 640 × 512 Boson thermal cameras are equipped with expandable infrared video streaming at 30 Hz.
FLIR, flir.com
Fixed-wing UAV
For surveyors, GIS professionals
Photo: SenseFly
The eBee Geo represents the first extension into a new eBee X series of fixed-wing UAVs and is positioned as a cost-effective option for surveyors and GIS professionals who may be unfamiliar with fixed-wing UAV mapping and data collection. With a maximum 45-minute flight time, the eBee Geo can achieve single-flight coverage of 160 ha at 122 m (395 A at 400 ft), suitable for smaller surveying firms and project-based drone service providers. Construction, urban planning and land management users can also benefit from the RGB imaging capabilities of the supplied senseFly S.O.D.A. camera fixed payload, while achieving greater efficiency and absolute accuracy down to 2.5 cm from the eBee Geo’s real-time kinematic (RTK) function. The eBee X is a premium version that offers users the high-precision of on-demand RTK/PPK for achieving absolute accuracy of down to 1.5 cm (0.6 in) without ground control points. Customers also have access to senseFly’s intuitive eMotion flight planning software.
SenseFly, sensefly.com
Actuator
With CAN and UAVCAN connectivity
Photo: Hitec Commercial Solutions
The SG50BL actuator includes CAN 2.0 A/B or UAVCAN control options. It is designed with robust steel gears and a high-performance brushless motor. It is capable of operating at 18 to 32 volts. The actuator features a programmable digital circuit with a MOSFET amplifier; a BLDC motor; a magnetic encoder position sensor; five hardened steel gears with low gear backlash (less than .5°); a four ball-bearing supported output shaft; and nine needle bearing supported idlers. It has a rugged anodized aluminum alloy case and an IP68 waterproof rating. The SG50BL also is capable of 360° proportional rotation and has T4131012051-000 TE connectivity. Custom connector options are available.
Hitec Commercial Solutions, hitecnology.com
Smart antennas
Designed for tough environments
Photo: Trimble
The AX940 and AX940i high-precision GNSS smart antennas are designed for a range of high-precision applications, including UAVs. With multi-frequency, multi-constellation support for GPS, Galileo, GLONASS, BeiDou, QZSS and NavIC, the smart antennas can deliver reliable centimeter-level accuracy in a variety of environments. In addition, the Trimble AX940 and AX940i provide reliable, high-accuracy positioning without the constraints of a local base station or cell modem by using Trimble RTX correction services. Built-in inertial sensors on the AX940i allow a tight integration with GNSS observations in the RTK/RTX positioning and orientation engine, providing continuous high-rate low-latency output to guidance and control systems. The Trimble AX940 and AX940i provide flexible interfaces with high-speed data transfer and configuration; simplified integrations reduce development times; and an intuitive 3D graphical web page allows easy input of the lever arm for easier set up.
The webinar will be presented by Gerhard Kruizinga, navigation engineer, Mars 2020 Navigation Team chief, NASA’s Jet Propulsion Laboratory, and moderated by Frank van Diggelen, ION president.
“We are honored to have the Navigation team chief of this historic mission, Gerhard Kruizinga, present his first-hand account of getting NASA’s Mars 2020 Perseverance Rover from the launch pad to a safe landing on Mars,” van Diggelen said.
The precision landing required very high-precision interplanetary navigation and accommodation of entry guidance target requirements, planetary protection requirements and propellant allocation for trajectory correction maneuvers.
The main navigation objective was to predict the trajectory accuracy at atmospheric entry, such that the entry descent and landing system requirements were satisfied for a safe landing. This presentation discusses the planning to meet all navigation requirements and the actual navigation performance during cruise and landing.
Topcon Positioning Group is partnering with CyArk, a non-profit organization committed to the conservation of cultural heritage sites around the globe.
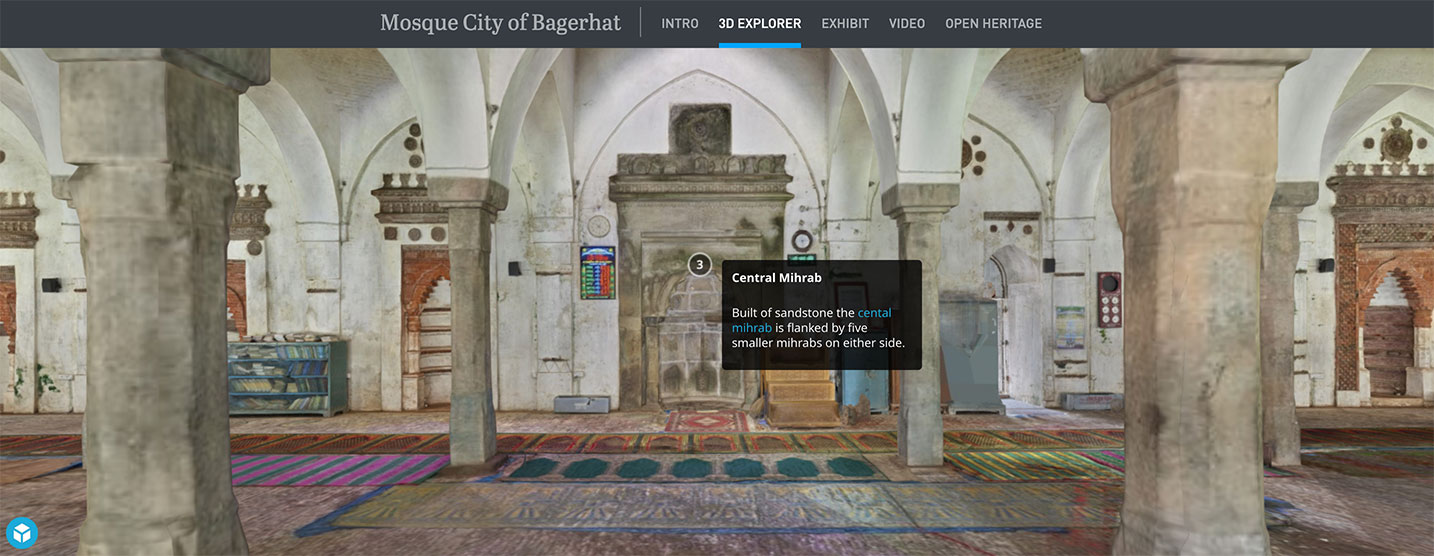
Using 3D digital documentation technology, CyArk works to ensure that culturally significant sites can be thoroughly and accurately documented for the benefit of current and future generations. Many of the technologies needed for doing so come from the geospatial world, making the Topcon partnership a welcome one, according to John Ristevski, CEO of CyArk.
“We have supported the documentation of over 200 sites around the world from the Mosque City of Bagerhat in Bangladesh to the iconic statues on Easter Island, but the need for high precision documentation continues to grow and there are many exciting projects yet to come,” he said. “High-precision measurement and documentation of these culturally significant sites is critical for decision making, so we are thrilled to be partnering with Topcon, an industry leader in that area and more.”
The commitment from Topcon includes GNSS receivers, robotic total stations, field controllers, MAGNET software and a subscription to Topnet Live, the company’s real-time GNSS reference network. According to Ulrich Hermanski, executive vice president of Geopositioning for Topcon Positioning Group, having worked alongside CyArk in the past, it was a pleasure to continue to support the organization in this way.
”Our relationship with CyArk dates back to 2015 when we helped them digitally document the Sogi Power Plant, one of Japan’s national industrial historic sites,” Hermanski said. “We quickly recognized and admired the crucial role they are playing in ensuring cultural landmarks of all types are preserved in a digital format. Our expertise — providing precision measurement solutions — blends perfectly with their needs, now and as they move forward.
“One of the first projects on which they plan to use the new solutions is mapping the redwood grove in Big Basin Redwood State Park, in California, an area that suffered severe damage in the recent wildfires,” Hermanski said. “We are pleased to help with this important effort.”
CyArk’s mission, to record, archive and share the world’s most significant cultural heritage sites, stems from a desire to not only save these places digitally but provide critical information to aid in the physical conservation and restoration of the sites today.
“In recent years alone, we’ve seen instances in which culturally-invaluable sites were damaged or lost to arson, terrorism or the effects of climate change,” said Ristevski. “To know that the accurate digital documentation efforts can play a role in rebuilding or reconstruction is a humbling opportunity. We are grateful to have Topcon partnering with us in our efforts.”
PNT services, such as GPS, are a national critical function that enable many applications within the critical infrastructure sectors. However, “The increasing reliance on GPS for military, civil and commercial applications makes the system vulnerable,” according to Space Policy Directive-7 (SPD-7), issued Jan. 15. “GPS users must plan for potential signal loss and take reasonable steps to verify or authenticate the integrity of the received GPS data and ranging signal, especially in applications where even small degradations can result in loss of life.”
The PNT Integrity Library and Epsilon Algorithm Suite address this issue by providing users a method to verify the integrity of the received GPS data. “We are excited to release these resources to the PNT community to improve resiliency against potential GPS signal loss,” said DHS S&T PNT Program Manager Brannan Villee.
“Since GPS signals can be jammed or spoofed, critical infrastructure systems should not be designed with the assumption that GPS data will always be available or will always be accurate,” said Jim Platt, chief of Strategic Defense Initiatives at the Cybersecurity and Information Security Agency (CISA) National Risk Management Center. “Application of these tools will provide increased security against GPS disruptions. However, DHS also recommends a holistic defense strategy that considers the integrity of the PNT data from its reception through its use in the supported system.”
The PNT Integrity Library and Epsilon Algorithm Suite are open source and available free of charge. To view more details, visit the DHS S&T PNT Program.
Photo: William Barton/iStock/Getty Images Plus/Getty Images
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following five focused on advanced technologies in high-precision GNSS. Papers are available at www.ion.org/publications/browse.cfm.
Railway health with GPS + Galileo
Railway infrastructure and vehicle maintenance expenditures are estimated to cost more than €20 billion per year at the European level. This indicates the demand for developing a low-cost system capable of providing prognostic information about the health status of the railway at the points of the interaction between the vehicle and the infrastructure (wheelset, pantograph, rail and catenary). To achieve these capabilities, SIA (System for vehicle-infrastructure Interaction Assets health status monitoring) is being developed by a consortium from five different European countries. Within the SIA, events are captured by a network of sensors, which are time stamped and then accurately geo-referenced by the positioning sub-system of SIA. The positioning sub-system is based on European GNSS (EGNSS) positioning algorithms tailored for the railway environment and comprises onboard as well as back-office processing.
GNSS-based positioning in the railway environment is very challenging. Hence, Galileo with its advanced signal structure is utilized in SIA (in addition to GPS) to improve availability as well as accuracy.
The onboard positioning algorithm has been developed based on a novel GNSS-inertial measurement unit (IMU) hybridized approach. The new approach can overcome frequent measurement gaps within the GNSS observations and maintain the accuracy level required by the SIA. An overview of the back-office positioning in SIA complements the presentation of the onboard processing.
Citation. Moradi, Ramin, Zheng, Yuheng, Hutchinson, Michael, Roth, Michael, Jahan, Kanwal, Goya, Jon, Alvarado, Unai, “Positioning for Train-infrastructure Asset Health Status Monitoring within the SIA-project,” Proceedings of ION GNSS+ 2020, pp. 2948–2959. https://doi.org/10.33012/2020.17636
Snapshot positioning
Snapshot positioning — from a very brief interval of the received satellite signal — is becoming popular for various applications. This paper studies the feasibility of achieving real-time kinematic (RTK) positioning using snapshot data, a method termed Snapshot RTK (SRTK). A major difference of this positioning method is the generation of code and carrier-phase GNSS observables, a procedure the authors explain. To explore the feasibility of achieving RTK under different scenarios, the rate of integer ambiguity resolution (IAR) is assessed by using snapshot measurements generated with different integration times and signal bandwidths under zero-baseline configuration. Under these assumptions, the key factor that influences the RTK fix rate is the code measurement noise. Double difference code measurement errors are evaluated and plotted with the resulting IAR fix rates to find the relationship between them. The performance of using multi-constellation and multi-frequency signals is tested as well. The fix rate can reach 100% when multiple constellations are used. The achieved positioning accuracy is shown to be less than 5 mm in horizontal domain when IAR is achieved successfully.
Citation. Liu, Xiao, Ribot, Miguel Ángel, Gusi-Amigó, Adrià, Closas, Pau, Garcia, Adrià Rovira, Subirana, Jaume Sanz, “RTK Feasibility Analysis for GNSS Snapshot Positioning,” Proceedings of ION GNSS+ 2020, September 2020, pp. 2911–2921. https://doi.org/10.33012/2020.17768
Cooperative positioning
Advances in low-latency communications networks combined with the paradigm of Intelligent Transportation Systems (ITS) have opened opportunities to develop network-based collaborative positioning and navigation. Recent research has fostered the concept of networked GNSS receivers supporting the sharing of raw measurements with other receivers connected to the network. Such measurements (for instance, pseudorange and Doppler) can be processed through Differential GNSS techniques to retrieve inter-receiver distances that can be integrated to improve positioning performance.
This paper investigates an improved Bayesian estimation for a sensorless, tight integration of Differential GNSS-based collaborative measurements through a modified particle filter. A particle filter natively supports the non-Gaussian noise distribution characterizing GNSS-based inter-receiver distances, so the proposed particle filter was designed, implemented and optimized according to the architecture of a proprietary INS-free GNSS software receiver and tested with realistic RF signals, thus showing remarkable improvement in positioning accuracy.
Citation. Minetto, Alex, Gurrieri, Alessandro, Dovis, Fabio, “DGNSS-based Cooperative Positioning using Statistics-Adaptive Particle Filter,” Proceedings of ION GNSS+ 2020, pp. 2652–2666. https://doi.org/10.33012/2020.17530
Virtual base station
RTK (Real Time Kinematic) is a positioning approach that provides centimeter level accuracy by using a reference station. When the rover and the base station are in proximity (short baseline), all common mode errors are eliminated by the double difference, allowing carrier phase ambiguity resolution. But in medium and long baseline cases, ionospheric and tropospheric delays are not completely eliminated, which affects positioning accuracy. This has limited the application of RTK, especially in certain regions where the closest base station is more than 50 km away.
Algorithms like RTK long baseline and VBS (virtual base station) have emerged as an alternative. The virtual base station (VBS) algorithm processes surrounding bases to generate a virtual one within a short distance of the moving rover. By doing so, atmospheric errors will continue to be eliminated in the double-difference model, and, presumably, RTK processing will be assured all across continents.
In this paper, a performance assessment of the algorithm is conducted under various conditions, including high ionospheric activity, high baseline, harsh multipath environments and, finally, in a long trajectory. The results show that the developed VBS algorithm ensures centimeter-level accuracy even under the harshest conditions.
Citation. Saidani, M., Sarri, P., Guinamard, A., Maya, D. Gallego, “Virtual Base Station Algorithm and Performance Assessment,” Proceedings of ION GNSS+ 2020, pp. 2696–2709. https://doi.org/10.33012/2020.17533
Open-world virtual reality
The Open-World Virtual Reality (OWVR) concept combines precise GNSS positioning and a smartphone-grade inertial sensor to provide globally-referenced centimeter-and-degree accurate tracking of a virtual reality headset. Unlike existing augmented and virtual reality systems, which perform camera-based inside-out headset tracking relative to a local reference frame (for instance, an ad-hoc frame fixed to a living room), OWVR’s globally referenced tracking enables a VR experience in which the user’s outdoor exploration is robust to extremes in lighting conditions and local visual texture. This paper introduces the OWVR concept and presents a prototype system with two candidate sensor-fusion architectures, one loosely and one tightly coupled. Comparative performance is evaluated in terms of tracking accuracy and availability of an integer-aperture-test-validated fixed tracking solution. For scenarios with degraded GNSS availability, which will be typical for outdoor VR, the tightly coupled architecture is shown to offer a critical tracking robustness advantage.
Citation. Humphreys, Todd E., Kor, Ronnie Xian Thong, Iannucci, Peter A., Yoder, James E., “Open-World Virtual Reality Headset Tracking,” Proceedings of ION GNSS+, pp. 2931–2947. https://doi.org/10.33012/2020.17635