Vision-RTK enables applications in previously unreachable areas and unlocks new possibilities for autonomous ground robots and drones
At this year’s Intergeo Digital event, taking place Oct. 13-15, Fixposition is debuting the Vision-RTK positioning sensor, a compact centimeter-accurate solution with high reliability and availability in environments that are challenging for traditional GNSS.
Photo: FixPosition
The Vision-RTK’s sensor-fusion algorithm is based on the deep integration of satellite, camera and inertial sensors, and enables unprecedented reliability and availability in diverse and challenging applications, the company stated.
“The highly integrated nature of our Vision-RTK sensor and our deep expertise in computer vision and real-time kinematic (RTK) GNSS enabled us to implement completely new approaches in sensor fusion, resulting in previously unseen performance,” said Lukas Meier, CTO and co-founder of Fixposition.
Traditional GNSS sensors suffer from limited reliability in GNSS-challenging and denied areas. On the other hand, standalone computer vision is sensitive to light conditions (such as snow, strong sunlight and rain) and struggles in situations where there is a lack of features such as cornfields and grass. Errors accumulate over time with standalone inertial technology, causing large drifts.
As a result, devices using either sensor are limited in their range of operation and are likely to fail in certain conditions. Fixposition’s solution increases the potential of these sensors with its unique sensor-fusion technology by increasing the trustworthiness of the positioning accuracy and the range of operation in different environments.
The real-time sensor fusion provides centimeter-accurate absolute positioning at any time, in any outdoor environment. This small module integrates two RTK-GNSS receivers and visual inertial navigation, and is suitable for applications where size and accuracy are of paramount importance.
The dual-receiver configuration, together with Fixposition’s advanced algorithms, provides a true-heading output and increased resistance to electromagnetic radiation.
The sensor provides USB and Wi-Fi connectivity and a web interface. It enables straightforward integration in state-of-the-art autopilot control systems for drones and robots. It’s also plug-and-play compatible with platforms such as PX4, ROS and Apollo.
For ground robotics and drones applications, Vision-RTK increases the device uptime and efficiency while enabling new market segments in areas previously inaccessible. For end-device manufacturers, this technology eliminates the need for an in-house development of advanced localization solutions, shortening their sales cycle and reducing costs and investments.
Visit the Fixposition booth and meet the team at Intergeo Digital 2020 to learn more about the Vision-RTK sensor.
Garmin has debuted the GPSMAP 65, 65s and 66sr, three new portable devices with improved technology, precision and connectivity. GPSMAP is the company’s line of premium outdoor navigation units.
The GPSMAP 65, 65s and 66sr offer multiband technology for positioning and tracking anywhere. They are the first Garmin portable devices to receive and use multiple satellite navigation frequencies.
The multi-band technology and expanded GNSS support with addition of the L5 frequency (GPS, GLONASS, Galileo, QZSS and IRNSS) allows for reduced estimated position error, giving users improved accuracy and awareness of their surroundings.
The new models include TopoActive maps of Europe, smartphone notifications, color screens, battery improvement, compatibility with the Garmin Explore app and more. All three are rugged, dust, shock and water resistant (IPX71 rated).
“We are excited to grow our popular lineup of GPSMAP handhelds and introduce multiple GPS frequencies into the series,” said Dan Bartel, Garmin vice president of global consumer sales. “We’ve expanded our satellite support so you can explore with confidence, no matter where you go or what the conditions are.”
GPSMAP 66sr
The premium version, GPSMAP 66sr, has a 3-inch color screen readable in all lighting conditions and is compatible with night-vision goggles. In addition, it has been designed to military standards for thermal performance and resistance to shock and water (MIL-STD-810G), and includes a built-in S.O.S. LED flashlight for assistance. To give the user even more confidence, incorporates ABC sensors (3-axis electronic compass), accelerometer and barometric altimeter), allowing users to obtain the most accurate data available at all times.
GPSMAP 66sr also provides global forecasts and weather through the Active Weather feature, updated through wireless connectivity via Bluetooth and ANT +. Via the Wi-Fi connection, users can download satellite maps.
The European Space Agency (ESA) has launched a call for proposals to demonstrate the capabilities of new 5G cellular networks to support positioning and timing applications to complement satellite navigation.
5G will bring higher speed, larger traffic capacity and ultra low-latency (or signal delay) communications. 5G will also usher in a range of new possibilities for positioning, navigation and timing (PNT).
ESA is inviting proposals to implement pilot projects to demonstrate the viability of 5G PNT solutions in a number of use cases:
Indoor PNT for Industry 4.0, as needed to support the operations of smart warehouses and factories or smart city applications requiring transition from indoor to outdoor environments.
Outdoor applications where a robust back-up to satellite navigation is essential to meet safety requirements, such as autonomous driving or drone navigation.
Applications where robust time and frequency synchronization is necessary, both in outdoor as well as indoor environments, like smart energy grids or the 5G networks themselves.
5G networks will allow new types of measurements made possible by advanced antennas and by new positioning signals at higher frequencies, at both base stations and the user receivers. 5G networks will also bring enhanced connectivity to improve cloud-based positioning applications and value-added services.
While satellite navigation works optimally in outdoor environments with a wide view of the sky, 5G PNT has the potential to bring PNT to deep urban canyons in high-rise city centers and indoor warehouses, wherever 5G networks are deployed.
The combination of satellite navigation and 5G brings the promise of high performance, secure and resilient PNT services, as well as a seamless application of PNT applications from outdoor to indoor environments and from rural to urban areas, ESA said.
This call for ideas is supported through ESA’s Navigation Innovation and Support Programme (NAVISP), working with European industry and academia to develop innovative navigation technology.
Webinar on PNT 5G
To support the call, an information webinar is being held on 21 October, in which the various PNT 5G use cases will be presented by key speakers from each sector. Details of the call and how to apply will also be presented by ESA.
A networking platform has also been established to allow webinar participants and general stakeholders interested in the call to get in touch and discuss possible cooperation. This platform will be kept open during the entire period of the call’s duration.
For more information on the call and the agenda of the webinar visit ESA’s NAVISP website.
To register for the webinar and the networking platform, click here.
The new AsteRx-m3 family features state-of-the-art GPS/GNSS OEM boards optimized for power consumption and ease of integration.
Photo: Septentrio
Septentrio has expanded its GPS/GNSS OEM portfolio with the AsteRx-m3 product family. AsteRx-m3 receivers target various use cases and offer flexibility and affordability with no compromises of performance.
The AsteRx-m3 family features very low power consumption, allowing longer operation times. Its easy-to-integrate design enables short set-up times and faster time-to-market.
“With the AsteRx-m3 product family, Septentrio redefines state-of-the-art GNSS positioning performance,” said Danilo Sabbatini, product manager at Septentrio. “It was a challenge to design a product that delivers multi-frequency and multi-constellation positioning, combined with Septentrio’s renowned GNSS+ technology while optimizing power. The AsteRx-m3 product not only excels in this but does so at a reduced cost.”
All AsteRx-m3 products represent the next generation of technology in the GNSS OEM market, delivering centimeter-level accuracy, availability and reliability in a credit-card sized board, Septentrio said.
The new product family includes three types of GNSS OEM boards.
The AsteRx-m3 Pro rover receiver tracks signals from all available GNSS constellations on three frequencies. Simple and powerful, it operates both in single- and dual-antenna modes.
The AsteRx-m3 ProBase is designed to operate as a reference station for RTK and PPP-RTK networks. It can be used as a base station or for network densification.
The AsteRx-m3 Pro+, a full-feature OEM receiver board flexible enough to fit into any application and to be used either as a rover or a base station in a single- or dual-antenna mode.
By offering its next-generation GNSS technology in a diversity of products Septentrio aims to improve customer experience while optimizing prices.
The United States Army has awarded Collins Aerospace a Phase III contract to build the second generation of its Mounted Assured Position Navigation and Timing System (MAPS).
The MAPS program adds anti-jamming capability for soldiers in GPS-contested environments. In 2019, MAPS Gen I units were installed on Stryker vehicles of the 2nd Cavalry Regiment in Germany.
Phase 3 of the MAPS Gen II program “begins combat platform integration in preparation for low-rate initial production,” according to an Oct. 7 Army press release.
MAPS Gen II includes M-code GPS receivers, provided by BAE Systems, along with anti-jamming antennas, sensor fusion and inertial measurement units to deliver assured PNT to soldiers.
MAPS Gen II is part of the Army’s goal to accelerate the development and fielding of modernized soldier capabilities.
“Less than a year after we equipped the first generation of MAPS in Europe we’re already pushing forward with the development of Gen II,” said Willie Nelson, director of the the Assured Positioning, Navigation and Timing (APNT) Cross-Functional Team (CFT). “This award comes less than a month after our Mounted APNT requirement was approved. The timing could not be better.”
MAPS Gen I includes A and B kits, consisting of cable and mounts to use on a vehicle and a military GPS paired with non-radio frequency technologies.
The Phase III Other Transaction Authority contract covers product maturation and begins combat platform integration, clearing the path to low rate initial production.
Army Stryker ground combat vehicle. (Photo: Karolis Kavolelis / Shutterstock.com)
The MAPS GEN II is comprised of the NavHub-100 PNT Distribution Device, the Multi-Sensor Antenna System (MSAS-100) and an optional speed sensor. The NavHub-100 works in concert with the MSAS-100 to produce a trusted A-PNT solution that can be distributed through serial interface, Victory Ethernet and RF distribution to multiple client systems.
MAPS GEN II supports the U.S. Army PNT Reference Architecture by leveraging modular technologies from across Collins’ A-PNT portfolio and industry. This scalable architecture builds upon the modular open system architecture (MOSA) standards and includes the All Source Positioning and Navigation (ASPN) generic message definition to support plug-and-play sensor integration and the Future Airborne Capability Environment (FACE) to host portable software capabilities.
The MAPS GEN II system not only supports direct replacement of the Defense Advanced GPS Receiver (DAGR) on military platforms, it also provides exceptional A-PNT performance in GPS-contested and GPS-denied environments.
YIC is a manufacturing and design company for quartz crystals, crystal oscillators, GPS/GNSS modules, GPS/GNSS receivers and RF antennas. It provides low-power solutions to solve product problems that require frequent charging.
YIC’s new product — the Ultra Low Power GPS/GNSS Module (Model YIC71009EBGG and YIC71513PGMGG) — is designed as an IoT product solution, targeted to improve the operating times of IoT applications such as trackers, wearables and portable devices.
According to its press release, YIC “is dedicated to providing the best solution for GPS devices and sees a tremendous opportunity in the GNSS market to solve power consumption problems.” The recent industry trend of multi-frequency GPS, low-power consumption, and dead reckoning will be advantageous to YIC in terms of high-grade products entering the global market.
Models YIC71009EBGG and YIC71513PGMGG provide:
Ultra-low power consumption – 6mA (Typical).
Multi-constellation – GPS/QZSS + GLONASS.
Small size
About YIC
Founded in 1994 and headquartered in New Taipei City, Taiwan, YIC is a professional partner in frequency control, GPS/GNSS modules, receivers and RF antennas, advanced low power GPS, and small size solutions.
While GPS technology originally started as a product of the space race, it has transformed in recent decades to be used in a variety of different industries. Its positioning and navigation capabilities make many everyday tasks easier to achieve. One industry that has continuously benefitted from this technology is agriculture.
The world’s population is expected to reach nearly 10 billion people by 2050, effectively increasing global food demand by 50%, according to the United Nations. To meet these demands, global agricultural productivity will need to increase by 1.75% a year.
Currently, productivity is only growing at an average rate of 1.63%, according to the Global Harvest Initiative. Precision agriculture and advanced technologies, such as automation, computer vision, artificial intelligence (AI) and machine learning are already on the farm helping farmers meet this demand, and GPS technology plays an especially significant and transformative role in making this happen.
Game-Changer
The development of automated driving and self-driving tractors has changed the game for farming by allowing technology to drive the machines with great accuracy, while farmers focus on other value-added tasks.
Over time, that technology further developed in conjunction with other technology on the farm, such as GPS. Having a reliable way to keep equipment from running over crops is incredibly important to farmers.
The GPS technology we use at John Deere is accurate within centimeters and complements the computer vision and sensors within the tractors with precise positioning in the field. This allows the farmer to drive faster without running over and damaging the crop. It also means farmers no longer cover the same ground twice.
Other technology has also been installed on farming machines to provide added value, especially when paired with GPS. When used alongside sensors, GPS offers the potential to enable real-time data collection. Sensors throughout the field let farmers know things such as where each seed was planted or environmental conditions while spraying nutrients on their crops.
Historical data from the farmer and garnered through the technology are turned into maps that, when combined with real-time information from the sensors, enable farmers to have even more accurate and precise information about what is happening next in the field, to ultimately optimize operations. This is critical as almost every job that gets done on the farm has to be completed in short time windows.
Spatial intelligence provides a more vivid representation of what is happening in the field at all times so the farmer can make real-time decisions and plan for the future.
Tasks such as tilling, planting, spraying and harvesting are easier when farmers have a more precise way to track their position. GPS technology, working in conjunction with computer vision cameras and sensors, allows crops to be distributed more evenly across a field and enables seeds to be planted at exactly the correct spacing and position to maximize yield.
All of these tasks boost productivity and sustainability on the farm by providing farmers with the data to make informed, sustainable decisions.
Photo: John Deere
Machines Talking to Each Other
Technology on farms has evolved to the point where machines can wirelessly communicate to each other in the field. This concept, known as machine-to-machine (M2M) communication, is also linked closely to GPS technology. Enabling machines to know where in the field another machine is and what work it has done in real time means the machines work as a team to get the job done in the most efficient way possible with no overlap. Coordination among machines helps farmers avoid redundant effort and the overuse of valuable inputs, which allows for more efficient use of resources and unlocks the potential of automation.
As the agriculture community continues to work to meet the rising demands for food, fuel and fiber, GPS technology will play a key role to help farmers make more food more efficiently, sustainably and with greater consistency in results. This not only benefits the farmer’s business, but it impacts every single person in the world.
Al Savage is the StarFire Network manager at John Deere.
Of the hundreds of papers researchers presented this year at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following three focused on navigation in urban environments. Papers are available at www.ion.org/publications/browse.cfm.
Low-Cost Single-Frequency PPP System
Featuring multi-constellation global availability, fast convergence and continuous navigation solutions, Instant PPP (IP3) was developed as an ideal precise positioning solution for mass-market applications in urban environments. The low-cost single-frequency PPP system demonstrates 50-cm accuracy in open-sky and suburban environments, and is further enhanced to support precise positioning in urban environments. The IP3 library is uniquely designed and enhanced. For instance, the instant receiver velocity based on the Doppler observations and the coordinate changes calculated from the carrier-phase differences between two consecutive epochs are integrated for the one-step prediction of the receiver positions in the Kalman filter.
Meanwhile, the weight of carrier phase, pseudorange and Doppler observations are smartly tuned as a function of signal-to-noise ratio (SNR) respectively. Additionally, quality control adapts to different scenarios, such as open-sky or urban environments. The receiver clock drifts for different constellations are specifically modelled in the velocity estimation to increase the degrees of freedom, which further enhances the solution availability in these extreme challenging situations.
To evaluate the IP3 library in urban environments, real-time vehicle-based field tests were carried out with an IP3 evaluation kit in Calgary, Canada. Results indicate the IP3 library can provide 50-cm accuracy in suburban areas with 100% solution availability. In an urban environment with numerous high buildings, the positioning root-mean-square error (RMS) of IP3 degrades to meter level while the solution availability remains 100%. IP3 can provide precise positioning solutions with low-cost GNSS receivers even in urban environments.
Citation. Hongzhou Yang, Fei Liu and Yang Gao, Profound Positioning Inc., Canada, “Precise Positioning into Urban Environments: A Low-Cost Single-Frequency PPP System.”
A Sub-Meter Real-time Positioning Service for Smartphones
A real-time positioning service for smartphones that meets a target threshold of 50 centimeters in urban environments is evaluated. The evaluation is possible through the Flamingo service, an API library for smartphone developers that enables higher accuracies than standard Google location services. The API is offered in a format that simply replaces Android location, streamlining its integration into new and existing applications that require better positioning. The service provides reference station infrastructure and correctional data products through a modified version of traditional NTRIP services. Duty cycling, low-quality clocks and high RF interference are common in a smartphone, so pre-filtering algorithms have been designed and calibrated to reject and de-weight poor measurements.
Based on proximity to a local base station, the service decides whether to use RTK or PPP-like processing. Performance is assessed on positioning accuracy, reliability and availability. Different operational environments are tested, such as pedestrian navigation in a congested area, and cycling scenarios. These are chosen to closely correspond to various applications. Rather than proving ideal test conditions and post-processing to optimize performance, the study focuses on realistic, real-time processing inside a smartphone.
Results are collected through a simple logging app that uses the Flamingo API. A target is set for 50 cm or better accuracies, where current smartphone positioning is within only a few meters. This enables mass-market location services to be applied in new markets such as augmented reality, lower accuracy surveying, GIS asset collection, and navigation assistance applications.
Citation. Joshua Critchley-Marrows, William Roberts, Malgorzata Siutkowska, Maria Ivanovici, NSL, UK; Valentin Barreau, Soufian Ayachi, Laurent Arzel, Telespazio, France, “A Sub-Meter Real-Time Positioning Service for Smartphones.”
The Path to Robust Municipal PNT
This research identifies where municipal governments fit in the positioning, navigation and timing (PNT) ecosphere, their awareness of PNT-related issues, whether and how they are approaching these issues, and actions they can take to improve their services to citizens and travelers. Lessons from other areas are applied, such as the resource typing construct used in FEMA’s National Incident Management System, to develop best practices for city PNT activity. This work will guide cities in addressing this important area and assist policy makers in efforts to involve cities in the development and implementation of PNT processes.
Citation. Steven Polunsky, Alabama Transportation Policy Research Center, University of Alabama, “The Path to Robust Municipal PNT.”
In a special advertiser-sponsored section of our October issue, we spoke with prominent GNSS companies about their current solutions for today’s industry challenges.
Q&A with CAST Navigation
Answered by Lou Pelosi, vice president
Lou Pelosi, vice president
Q: What is your most proven GNSS solution?
A: CAST Navigation does not supply GNSS receivers (GNSS solutions), rather we manufacturer GNSS simulators which are used to test GNSS receivers. CAST has had the most success with our GNSS/INS simulator. It provides an Embedded GPS Inertial (EGI) navigator with coincident GPS and inertial data. The EGI “thinks” it is moving while it remains stationary.
With our GNSS/INS simulator, the operational flight program of the EGI can be tested. During development of a platform’s navigation system, the CAST simulator is used to recreate the identical test conditions as the EGI’s software is modified. Once the platform’s navigation system is finalized, the output of the EGI is used to drive other systems, such as flight control or radar.
The GNSS/INS simulator can also include Controlled Radiation Pattern Antenna (CRPA) test features. If the EGI being used by the platform has an anti-jam antenna, the simulator can also test that feature.
The CAST GNSS/INS simulator has proven to be a key piece of equipment in system integration laboratories as new aircraft are developed.
Photo: CAST Navigation
Q: What are the solution’s key specs?
A: A key element of our GNSS/INS simulator is the inertial model contained in the simulator. It is a whole value inertial model rather than an error model. In its normal state, it reacts in the same manner as the actual inertial of the EGI. It also had degraded modes that are used to simulate hardware failures. When analyzed by the EGI manufacturers, its noise characteristics are almost identical to fielded navigation systems.
Q: What are the solution’s key features and benefits?
A: The most obvious benefit of using a CAST GNSS/INS simulator is cost savings. Even with the cost of lab equipment and personnel, there is still a savings over flight testing. A key feature of using a simulator for testing is its repeatability. Every time you rerun a test; the conditions are the same. In the real world, the satellites change constantly. Being able to accept real-time trajectory data is another key feature of CAST simulators. Instead of using our internal point mass model for scenario generation, an actual flight profile can be sent to the simulator from an external computer.
CAST has also been authorized by the GPS Directorate to provide classified functions to authorized users. Available options include Y-code, SAASM and M-code MNSA.
A: Kolmostar specializes in ultra-low-power, instant cold-boot GNSS positioning solutions for internet of things (IoT) applications, mobile devices and beyond.
Q: What are the solution’s key specs?
A: Our advanced GNSS positioning module JEDI-200 is specially designed for location-based IoT applications such as asset tracking, fleet management, pet/livestock tracking, smart wearables and share economy. It is also optimized for integration with LPWAN (low power wide area network) technologies such as LoRaWAN®/NB-IoT/LTE-M to provide the ultimate ultra-low-power profile for IoT applications. There are two outstanding advantages of JEDI-200: ultra-low-power and instant cold-boot. With 25 mW power consumption and the revolutionary 1-second TTFF (time to first fix), JEDI-200 is able to reduce the energy consumption to get one position fix by up to 120x compared to traditional GNSS modules on the market.
Q: What are the solution’s key features and benefits?
Photo: Kolmostar
A: GNSS/GPS sensors are one of the most power-consuming sensors in IoT or mobile devices. Battery life will be significantly shortened when GNSS/GPS sensors are turned on. Hence, many IoT and mobile devices either do not include GNSS/GPS sensors or have to equip themselves with very large batteries, incurring much inconvenience and cost. Kolmostar’s ultra-low-power and instant cold-boot JEDI-200 module is specially designed to solve this long-standing industry pain point.
With its ultra-low-power feature, JEDI-200 is able to reduce the energy consumption to get one position fix by up to 120x when compared to traditional GNSS modules. IoT devices with very limited-sized batteries are now able to have GNSS positioning ability while still maintaining a battery life up to 10+ years. Another key feature of JEDI-200 is instant cold boot. Unlike traditional GNSS modules’ 30-second TTFF in cold boot, JEDI-200 can achieve an instant 1-second TTFF, providing a better and more seamless customer experience when short latency/response time is particularly desired in certain applications. In addition, JEDI-200 is optimized for LPWAN technologies such as LoRaWAN®/NB-IoT/LTE-M, further reducing both the cost and the power consumption of devices’ wireless communication, which is another big challenge most IoT and mobile devices previously faced.
A: The LabSat 3 Wideband GNSS simulator offers multi-constellation and multi-frequency capabilities for reliable, repeatable and consistent testing. Its one-touch Record and Replay provides an efficient way to test and develop GNSS receivers without the cost, inconvenience and limitations of live-sky signals. Combining LabSat with the custom simulation software SatGen enables the creation of GNSS RF I&Q or IF data files based on a bespoke scenario, allowing for almost any kind of test at a set time, date and location.
Q: What are the solution’s key specs?
A: With three channels, a bandwidth of up to 56 MHz and 6-bit sampling (3-bit I and 3-bit Q), LabSat 3 Wideband can handle almost any combination of constellations and signals that exists today, with plenty of spare capacity for future planned signals.
Q: What are the solution’s key features and benefits?
A: LabSat 3 Wideband is small and affordable, making it an ideal solution for companies to provide their employees with a suitable method of testing their GNSS devices whilst working from home. In addition to its compact size, an internal battery delivers up to two hours of run time to record scenarios in even the most challenging field environments.
Photo: Labsat
It is incredibly user friendly with one touch record and replay and an HTML interface that makes setup simple and problem-free. A range of additional signals can also be recorded and synchronized to the GNSS input: dual-CAN, RS232 and digital inputs are simultaneously captured, increasing the level of playback realism and allowing for a wider range of testing.
The latest version of SatGen can be used to create a single scenario containing all the upper and lower L-band signals for GPS, Galileo, GLONASS, BeiDou and NavIC, and takes advantage of the LabSat 3 Wideband’s ability to read RF data at up to 95 MB/s. Creating an artificial scenario using SatGen allows for precise control of the data content, creating a standardized file for repeatable testing and carrying out true comparisons between receivers.
The versatility of the LabSat 3 Wideband makes it a familiar sight on the desks and benches of technology companies around the world. From GNSS device and application testing to receiver sensitivity and end-of-production-line testing, LabSat 3 Wideband is a perfect testing partner.
Q: What is Trimble OEM GNSS’ most proven GNSS solution?
A: The Trimble BX992 is the flagship product from the Trimble OEM GNSS portfolio, proven in multiple environments and applications. Powered by the BD992-INS receiver module, this rugged yet compact enclosure allows original equipment manufacturers and system integrators to rapidly integrate precise position and orientation data to guidance, control and autonomous applications. Continuous data sets collected from test sites and real-world applications around the world have been used to create a powerful engine that performs in the most challenging of GNSS environments.
The Trimble BX992. (Photo: Trimble)
Q: What are the solution’s key specs?
A: The Trimble BX992 delivers low-latency 100-Hz centimeter-level positions with tight integration of IMU sensor data and GNSS observations in the RTK/RTX engine. The rugged IP67 enclosure supports multi-frequency tracking from GPS, Galileo, GLONASS, BeiDou, QZSS and NavIC constellations. The dual-antenna inputs allow rapid and robust alignment of onboard gyro sensors. With Trimble RTX correction services, the BX992 delivers reliable, high-accuracy positioning without a local base station or cell modem.
Q: What are the solution’s key features and benefits?
A: The BX992 is a full-featured solution with an onboard spectrum analyzer, a critical tool for developers to identify interference from unwanted signals, thus allowing products to be released to the market within specification and on schedule.
GNSS receivers first reached the commercial domain in the early 1980s. They were bigger than your average carry-on suitcase, weighed more, and consumed so much power that they needed to be plugged into an outlet. But technology advanced quickly, and by the mid-1980s commercial GNSS receivers were appearing in survey and marine markets.
Generation 1. The first generation of truly mobile receivers, in the late 1990s, used only L1 C/A code and were typically found in rugged handhelds for outdoor enthusiasts. The receivers began appearing in mobile phones in the late 1990s.
Gen 2. The second generation added GLONASS. These receivers had to have wider bandwidths on the order of 20-30 MHz to support the GLONASS FDMA signals at a slightly offset frequency from GPS L1.
Gen 3. These receivers added support for Galileo. They started appearing in mainstream cellphones in about 2014. These phones still retained a single frequency front end in the L1 band, but had separate digital processing chains for all three satellite systems.
Gen 4. This evolution added support for BeiDou and a single sideband L5 receiver where BeiDou, Galileo and GPS all have modernized signals. These receivers first appeared in phones in 2019 because of the added size, power and complexity of supporting a dual-band receiver. The front end is a burden on many phone models, especially with the rise of 5G. Plus, the L1 band has reliability issues with jamming and interference. The receivers only support a single sideband at L5 and are not utilizing the full capability of L5.
Every GNSS user in every segment benefits from using the new, modernized signals in the L5 band. L5 signals are more accurate, reliable and available in sufficient numbers to support all user segments. Here are the major advantages of L5 over L1.
Signal structure (narrow correlation peak) accuracy
Wide bandwidth (multipath mitigation) accuracy
Pilot codes (longer coherent integration increasing SNR)
Multiple constellations and signals with common signal structure
Stronger signal transmission
Cleaner band with less interference
Signal availability
The benefits of L5 are clear. That’s why many GNSS suppliers have started building L1/L5 solutions, and they are starting to appear in smartphones. It seems to be a natural progression to add an L5 receiver chain on top of an existing L1 solution and be able to reap the benefits. But bringing along the legacy L1 solution could actually have a negative impact on the overall solution.
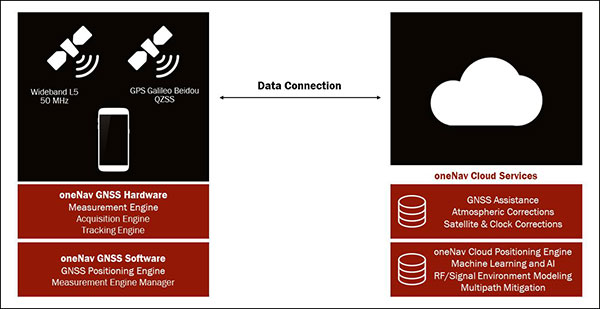
The oneNav L5 mobile GNSS system architecture. (Image: oneNav)
L5 Wideband Receiver
We set out to build a fifth-generation GNSS receiver for mobile consumer products. Its single-frequency design only uses the modernized, wideband signals at L5. It has an acquisition engine sophisticated enough to acquire L5 signals directly and a navigation engine that uses artificial intelligence/machine learning (AI/ML) techniques to fully exploit all the signals in 50-MHz wideband at L5.
Optimized engine. Building an acquisition engine for the L5 signal is a huge mathematical task. Since the codes are 10 times longer and have a 10 times faster chipping rate, it’s a 100 times more difficult search problem. The oneNav engine solves that problem with a customized array processor that has a GPU-like approach, maintaining TTFF.
Single-frequency architecture. Pure L5 architecture eliminates the need for a second RF chain. The oneNav L5 engine uses common hardware for signals from all GNSS systems.
Increased sensitivity. The L5 signal has a modernized signal structure that allows for increased sensitivity for both acquisition and tracking. With wideband architecture, all parts of the L5 signal can be combined for maximum performance and significantly more signal strength than L1.
Improved time to fix. Dual-band receivers first get a fix on L1 and then begin the acquisition process on L5. By performing the L5 acquisition directly, we save time.
Acquisition reliability. The L1 signal structures do not have the longer primary codes and the secondary codes like modernized signals on L5 that mitigate many of the reliability problems associated with cross correlation, jamming and spoofing.
Improved tracking and measurement. Using the full bandwidth allows a more sophisticated channel estimation than a simple pseudorange measurement. With multiple signals contained within the L5 wideband signal, we gain advantages from channel diversity.
AI/ML navigation engine. A cloud-connected navigation engine uses advanced AI/ML techniques to further improve navigation accuracy. Sophisticated ML techniques to predict if the received signal is line of sight and predict the measurement error caused by multipath. The cloud service allows reflected signals to be used correctly in the navigation solution rather than being excluded due to their multipath content. A sophisticated pattern-matching-based positioning algorithm combines the pseudorange measurements and the environment’s 3D building map model to enhance positioning accuracy in deep urban canyons.
IP Core
We designed the oneNav receiver as a licensable IP core rather than a discrete silicon solution. The complete solution includes all the firmware and an RF front-end reference design from antenna to A/D converter. This allows customers to determine how to best bring the oneNav advantages to their products.
The IP core can be integrated into a larger ASIC such as a modem or an SOC. It could also be implemented as a discrete silicon solution. The RF could be combined into any of these solutions or implemented with other RF components in the system. The measurement and position engine firmware can be run on a dedicated CPU or shared in either the same or different CPUs for flexible system integration optimal for various applications. The IP core is both process independent and scalable. An integrated GNSS core means that GNSS performance can be maintained across multiple platforms and silicon generations, providing consistency of measurement and positioning performance needed to maintain system reliability and fusion.
In my opinion, the Pure L5 wideband receiver can be considered a next generation — or fifth generation — of GNSS for mobile consumer products.
UPDATE (Oct. 5):Elon Musk, SpaceX founder and CEO, said a Falcon 9 launch was halted Friday night due to an “unexpected pressure rise in the turbomachinery gas generator,” referring to a part in the rocket’s Merlin engines, reports SpaceflightNow.
SpaceX has not yet set a new launch date. Another planned launch, for a Starlink satellite, was also aborted.
UPDATE (Oct. 3):Only two seconds before launch, SpaceX aborted the scheduled launch of the fourth GPS III satellite on Oct. 2. SpaceX has not yet announced a new launch window, or stated the reason for the cancellation.
We will need to make a lot of improvements to have a chance of completing 48 launches next year!
(Oct. 1) The U.S. Space Force’s newest GPS III satellite, Space Vehicle 04 (GPS III SV04), rolled out to Cape Canaveral’s Space Launch Complex 40 on Sept. 27. Originally scheduled for launch Sept. 30, then Oct. 1, the satellite is now slated to launch 9:43 p.m. EDT on Oct. 2 (01:43 a.m. UTC on Oct. 3).
The launch was delayed because of a “traffic jam” at the launchpad. According to Spaceflight Now, SpaceX initially rescheduled the GPS launch for Wednesday night after a Delta 4 launch was delayed to Tuesday. After the Delta 4-Heavy’s scrub Tuesday, SpaceX announced the GPS launch would be pushed back to Friday, when there is a 15-minute launch window available opening at 9:43 p.m. EDT (0143 GMT Saturday, Oct. 3).
The Lockheed Martin-built GPS III SV04 is scheduled to launch aboard a SpaceX Falcon 9 rocket — the third National Security Space Launch (NSSL) mission on a Falcon 9 rocket, the second U.S. Space Force (USSF) first-stage booster recovery, and the sixth USSF launch on Sept. 30. The 15-minute launch window opens at 9:51 p.m. EDT. A live feed will begin 20 minutes before the launch and conclude approximately 45 minutes afterward. A simulcast of the broadcast can be viewed at www.spacex.com.
“The GPS III program office in partnership with our contract teammates continue to push the envelope on the capabilities they deliver to users, both civil and military around the globe. Our latest GPS III satellites’ nearly 70 percent digital payload provides the U. S. Space Force with greater operational flexibility and cutting edge capabilities while continuing to support legacy users,” said Cordell DeLaPena, Air Force program executive officer for SMC’s Space Production Corps.
GPS III SV04 will be launched to augment the current GPS constellation comprised of 31 operational spacecraft. GPS satellites operate in Medium Earth Orbit (MEO) at an altitude of approximately 20,200 km (12,550 miles) in six orbital planes. Each satellite circles the earth twice per day. GPS is the premier space-based provider of positioning, navigation, and timing services for more than four billion users worldwide. This latest generation of GPS satellite boasts a 15-year design life — 25 percent longer than the previous generation of GPS satellites on orbit.
GPS III brings new capabilities to users such as the new L1C civilian signal, which opens the window for future interoperability with international satellite navigation systems.
“Our GPS III team is excited to be here once again. Less than 3 months ago, we successfully launched GPS III SV03. Since then, the team has successfully delivered the satellite to its final orbit, performed on-orbit testing and delivered the satellite to operations, while executing a mature satellite production line. I can’t be more proud of everyone involved in this mission,” said Col. Edward Byrne, Medium Earth Orbit Space Systems Division chief. “The launch of GPS III SV04 will continue to modernize our GPS constellation by increasing our capabilities with advanced features for both our civil and military users across the world.”
A Falcon 9 with GPS III SV 04 encapsulated inside the payload fairing the stands vertical on the pad at Cape Canaveral’s Space Launch Complex 40 in preparation for launch. (Photo: USAF/SpaceX)
The 60th meeting of the U.S. Civil GPS Service Interface Committee was held Sept. 21-22, utilizing a virtual meeting platform. This was an opportunity for anyone in the world with access to a computer to attend these public meetings of the U.S. Civil GPS Program.
For readers who were unable to attend, a synopsis of the meeting is provided below. The full agenda and presentations are available for download from the GPS.gov website.
The meeting of the CGSIC is an annual event, free and open to the public, conducted to provide updates from U.S. GPS program officials and ensure effective information exchange between the U.S. government and civil GPS users. The two-day meeting is hosted by the U.S. Department of Transportation (DOT) and the Coast Guard Navigation Center (NAVCEN). DOT serves as the civil lead for GPS and chairs the CGSIC in this capacity. NAVCEN is assigned duties as Deputy Chair and Executive Secretariat for the CGSIC.
Subcommittees of the CGSIC for Timing, International Information, and Surveying-Mapping-Geosciences held meetings on Sept. 21, and a summary of these meetings was presented during the CGSIC plenary session conducted on September 22nd.
Major General John E. Shaw, Combined Force Space Component Commander, U.S. Space Command, and Commander, Space Operations Command, U.S. Space Force, provided the keynote for this year’s plenary session. This address was followed by comments from Colonel Curtis Hernandez, Director of National Security Space Policy on the National Space Council and briefings from a variety of other government agencies.
This year’s meeting was replete with briefings from all over the world including an explanation in the International Information Subcommittee of COVID-19 Tracking in South Korea from the Deputy Director of the Korea Ministry of the Interior and Safety.
Everett Hinkley from the U.S. National Forest Service spoke in the Surveying, Mapping and Geosciences Subcommittee showing how the National Remote Sensing Program supports a variety of business areas of the Forest Service including how they are tracking the spread of the Mountain Pine Beetle infestation in our nation’s forests.
The Timing Subcommittee provided an engaging presentation on the current and future plans of the National Institute of Standards and Technology’s new Network Time Services.
Presentations during the plenary session focused on the operational status of the GPS constellation and ground control system modernization, U.S. Space-Based PNT policy, GPS augmentation systems, U.S. engagement with other international GNSS providers, PNT resiliency efforts, as well as a variety of topics related to the status and progress of ongoing GPS programs in the U.S. government.
If you have suggestions for topics to include in upcoming CGSIC meetings, would like to present a topic, or if you found information from past meetings useful and would like to hear more, please contact us via our Navigation Center “contact us” form. Please be sure to select “Civil GPS Service Interface Committee (CGSIC)” from the pull-down menu.
From a GPS operational perspective, civilian non-aviation users can submit GPS-related inquiries or report signal interference or degradation to the U.S. Coast Guard Navigation Center online or to the 24-hour watch desk at 703-313-5900.
Civil aviation users within the United States should contact the Federal Aviation Administration for GPS user support. The GPS Operations Center at Schriever Air Force Base, Colorado, is the Department of Defense lead for operational issues and questions from military users of GPS.
Rick Hamilton CGSIC Executive Secretariat GPS Information Analysis Team Lead U.S. Coast Guard Navigation Center