The SeaFIND inertial navigation system (INS) on April 1 received Type Approval from the U.S. Coast Guard, confirming that it meets an important international performance benchmark.
SeaFIND — Sea Fiber Optic Inertial Navigation with Data Distribution — was developed by Northrop Grumman for small- to medium-size combatant and auxiliary ships. With its small footprint, it can also be used on unmanned underwater and surface vehicles, or coastal and offshore patrol vessels.
SeaFIND builds from the software, algorithms and digital messages used on the MK39, a ring-laser INS installed around the world with the U.S. Navy and partner fleets. Instead of a ring-laser gyro, SeaFIND uses Northrop Grumman’s enhanced fiber-optic gyro technology (eFOG). eFOG maintains equivalent performance in a much smaller footprint — yet is more reliable.
“Fiber-optic technology is inherently more reliable with a higher mean time between failure rate than ring-laser gyro technology, which requires a high-voltage laser to operate and degrades over time,” explained Tom Disy, manager of Strategic Planning for Maritime/Land Systems & Sensors. An improved version of FOG, eFOG allows for the inertial measurement unit (IMU) within SeaFIND to achieve dependable navigation-grade performance, Disy explained.
SeaFIND’s embedded Navigation Data Distribution System (NAVDDS) software collects all the navigation data the ship receives, including SeaFIND and GPS data. NAVDSS then provides this data to other ship systems in a time-corrected, system-specific format. Time correction is necessary to maintain accuracy requirements, especially for applications requiring highly accurate dynamic attitude. NAVDDS’ low data latency allows the system to interface with any users that require accurate position and timing, such as combat systems or TACAN (tactical air navigation systems).
The SeaFIND INS complements the data received from GNSS. “Our inertial systems utilize GPS data when available; however, the SeaFIND INS also provides other key navigation data, including heading, roll and pitch,” Disy said. “The SeaFIND INS provides reliable position data for a significant period of time if the GNSS system data becomes unreliable or unavailable for any reason.”
SeaFIND is not subject to ITAR (International Traffic in Arms Regulations) and available for use by domestic and international navies.
UAV Navigation has developed a Visual Navigation System (VNS) that reduces the accumulated positional error during dead-reckoning navigation. The VNS leverages visual odometry techniques to determine the position and orientation of the aircraft by analyzing and processing the images captured by a camera installed on its underside.
Initial testing in real-time flight conditions has been a success, reports UAV Navigation. The system integrates well with the company’s flight-control solution to improve navigation in GNSS-denied environments.
Vector autopilot. (Photo: UAV Navigation)
UAV Navigation’s sensors are tolerant toward GNSS failures (typically, in GNSS-denied scenarios) and can operate in dead-reckoning mode without compromising flight safety. However, a prolonged GNSS failure can lead to a significant navigation drift, and this is where the VNS comes in.
The VNS system includes a simple belly-mounted camera and image processing computer. Images from the camera are processed by a lightweight onboard computer, translating them into a relative change in the aircraft position. This information can be combined with the inertial sensors to reduce the overall drift to < 1% of the distance traveled, eliminating any drift associated with time.
Combined with the Vector autopilot, the VNS components provide a complete and robust autonomous flight control and navigation solution.
America’s space assets are in danger from an array of kinetic, non-kinetic, electronic and cyber threats. These are wielded by nation states, primarily China, Russia, Iran and North Korea, though there are other countries as well as non-state actors.
On March 30, the Center for Strategic and International Studies (CSIS) Space Threat Assessment 2020 released a catalog that highlights the ways essential space-based services Americans rely upon can be degraded or eliminated. But it doesn’t do much to “assess threats.”
That said, it is still an impressive, useful and informative document. Some of what it doesn’t say can be inferred, and it provides a clear conclusion for policy makers and others.
Threat assessments are typically undertaken to:
Identify potential dangers,
Evaluate their credibility,
Weigh potential impact, and
Estimate the probability of the threat turning into an incident
This CSIS report generally stops after accomplishing the first two tasks.
Nonetheless, it is very instructive in a several ways.
Interference with Space Systems
First, it is packed with examples of how America’s adversaries have armed themselves, and stories about interference with space-based systems. Whether it is information about China training troops to use direct-ascent weapons, or reports about Russia’s mass GPS spoofing, the report’s matrix of threat categories is well supported by examples of real-world events.
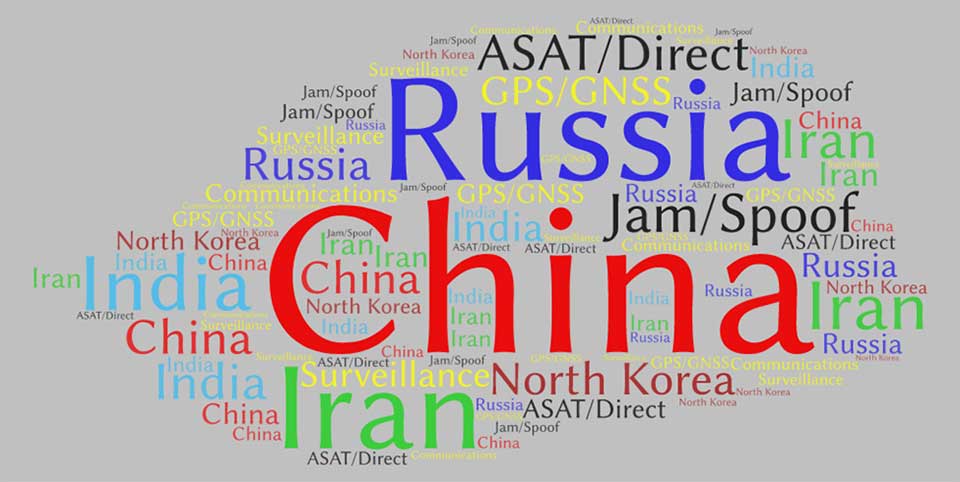
Second, while the report doesn’t overtly rank threats and adversaries, it is possible to infer some generalities by the attention the report devotes to each. Among potential adversaries, China was mentioned the most by far — 429 times. It was followed by Russia (275), Iran (206), India (141), and North Korea (132).
This word cloud from CSIS Space Threat Assessment 2020 shows that China received by far the most mentions, followed by Russia. (Image: RNT Foundation)
Jamming and spoofing
Jamming and spoofing seem to be the most credible threats and were mentioned 188 times, with ASAT and direct-ascent closely following with 179 mentions. This particular word count might not be reflective, though, as the report contains many more examples of real-world jamming and spoofing than ASAT and direct-ascent.
And of all the types of satellites that could be threatened, GPS/GNSS was the clear leader at 98 mentions, with communications and surveillance coming in at 42 and three, respectively.
In all fairness, at only 80 pages, it’s not possible for Space Threat Assessment 2020 to be an exhaustive analysis. And doing more would likely require making it classified. Then this exceptionally educational reference would not be nearly as available for the policy making audience that sorely needs it.
And it does provide an excellent bottom line for those making macro-level decisions about space policy and budgets going forward. From the report’s “What to Watch” section:
Electronic counterspace weapons continue to proliferate at a rapid pace in both how they are used and who is using them. Satellite jamming and spoofing devices are becoming part of the every-day arsenal for countries that want to operate in the gray zone — i.e., below the threshold of overt conflict. The jamming and spoofing of satellites has become somewhat common, and without strong repercussions these adverse activities could gradually become normalized…
One should expect that the rate of satellite jamming and spoofing incidents will only increase as these capabilities continue to proliferate and become more sophisticated in the coming years.
A roundup of recent products in the GNSS and inertial positioning industry from the May 2020 issue of GPS World magazine.
SURVEYING & MAPPING
RTK thermal mapper
Asphalt paving with RTK positioning
Photo: Topcon
The Thermal Mapper is designed to monitor temperature segregation to prevent future problems and measure performance, as well as provide accurate compliance reporting, using real-time kinematic (RTK) positioning accuracy. It records temperature readings behind an asphalt paver during paving and provides a visualization to operators in real time of whether the mix falls within a predefined temperature range. If the readings are unacceptable, operators can make adjustments. The system also creates data reporting files to download for applications such as U.S. Department of Energy compliance through the interactive Pavelink module, the Topcon cloud-based logistics application for asphalt paving.
The Z-Boat 1800-T unmanned survey vessel is equipped with Trimble’s high-precision GNSS heading receiver and compatible with Trimble Marine Construction (TMC) software. The Z-Boat 1800-T enables marine construction and dredging projects to run efficiently and be monitored in real time anywhere in the world. The Z-Boat 1800-T is a high-resolution shallow-water hydrographic unmanned survey vehicle with the newly released Odom Hydrographic Echotrac E20 Singlebeam Echosounder and dual-antenna Trimble BX992 GNSS heading receiver. Each sensor is integrated into a compact, portable package for marine construction and allows data collection under harsh conditions. Both sensors can be removed and mounted on other watercraft and barges.
The 280MP Aerial Solution has an image coverage width of more than 20,000 pixels. The large format enables high-quality aerial surveys. Compact and lightweight, the aerial mapping solution consists of an iXM-RS 280F large-format camera, Applanix GNSS/inertial measurement unit (IMU) POS-AV receiver, DSM 400 Somag gyro-stabilized mount, Phase One iX Controller and iX Flight Management software. It is designed for use in a wide range of aircraft.
The Atlans Series of FOG-based inertial navigation systems (INS) is designed for land and air mobile-mapping applications. Based on iXBlue’s fiber-optic gyroscope (FOG) technology, the Atlans Series is a scalable range of north-seeking and north-keeping INS. They provide FOG performance to the full spectrum of land and air mobile-mapping applications and offer highly accurate positioning up to 0.01 meter in all conditions, including within GNSS-denied environments such as urban canyons, mountainous or forested areas.
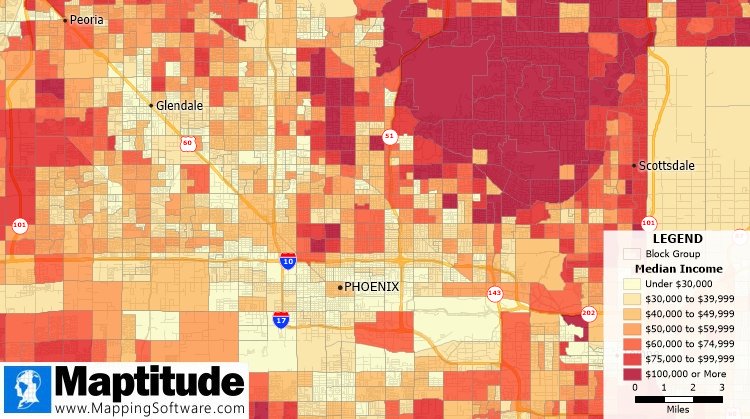
The Maptitude 2020 U.S. Census Blocks Groups data is now available for the United States. The small-area Census Summary Level is packed with neighborhood information for making accurate geography-based decisions. Users can explore locations by income, income growth, daytime population, age, race, gender, ethnicity, occupation, housing characteristics and more. The data can be leveraged by data scientists and market research analysts using the Maptitude application. The files are also available as shapefile, KML, KMZ or GeoJSON.
The high-performance LandMark 60 INS/GPS and compact LandMark 005 INS/GPS both feature advanced sensor-fusion technology, combining a 72-channel GNSS receiver with low-noise, high-output inertial sensors as well as barometric pressure and magnetometers. Both products use proprietary Velox processing technology and an extended Kalman filter (EKF), enabling precision position information during short-term GPS outages. The units provide accuracy of less than 2 nautical miles per hour during short-term GPS outages. The LandMark 60 provides +/– 0.3° heading accuracy and pitch/roll angle measurements of 0.1°. It is also available with an option for a real-time kinematic (RTK) GPS receiver. The LandMark 005 is less than 35 square centimeters, suitable for space-constrained applications that require a high standard of performance. Applications include flight control, navigation and stabilization for imaging, platforms and antennas. A development kit is available for set-up, configuration and data collection.
The IQCM-112 series of GNSS-disciplined oven-controlled crystal oscillators (OCXOs) incorporates an internal GNSS receiver with a 1-PPS output, which is compatible with an external GPS, GLONASS, BeiDou and Galileo source. It is housed in a 14-pin 60-millimeter-square package. When coupled to an external aerial antenna via the incorporated SMA connector, in the event of the loss of the GNSS signal the highly specified 10-MHz OCXO will switch in with a holdover capability of 1.5 µseconds for a 24-hour period, thereby maintaining lock until restoration of the reference signal. The standard operating temperature range of the module is –20° to 75° C, but it is also available with a –40° to 85° C operating temperature range. Other holdover specifications can be considered upon request.
The HC977 covers GPS/QZSS-L1/L2/L5, GLONASS-G1/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, IRNSS-L5 and L-Band correction services, as well as GLONASS-G2. Tallysman helical antennas are designed for high-accuracy applications where precision and light weight matter, such as unmanned aerial vehicles. The antennas are available in either a robust IP67 enclosure or an embedded format. The HC977 features a low current, low noise amplifier (LNA) that includes an integrated low-loss pre-filter to protect against harmonic interference from high amplitude interfering signals, such as 700-MHz band LTE and other near in-band cellular signals.
The RG500Q is a series of 5G sub-6-GHz modules optimized for internet of things (IoT) and machine-to-machine (M2M) applications. It supports the Qualcomm IZat location technology Gen9C Lite (GPS, GLONASS, BeiDou/Compass, Galileo and QZSS). The integrated GNSS receiver greatly simplifies product design and provides quick, accurate and dependable positioning capability. The RG500Q is provided in two variants: RG500Q-EA and RG500Q-NA. The RG500Q-EA 5G NR module has achieved commercial readiness and is now available to support global customers with mass deployment.
The V-150 is optimized for use from small naval vessels. It can be employed to support the homeland security, oil and gas and energy sectors. The UAV, which is free from International Traffic in Arms Regulations (ITAR) restrictions, incorporates two payload bays: up to 30 kilograms (kg) in the main bay and up to 12 kg in the nose. Within these, it provides a variety of payload options, including powerful electro optical and infrared (EO/IR) sensors, hyperspectral and multispectral cameras for airborne remote sensing, lidar and a variety of small tactical synthetic aperture radars (SAR) for delivering real-time intelligence in all weather conditions.
The SP-56 series is a family of small two-cylinder engines for UAVs. It can be integrated into small helicopters, which require smoother engine operation than single cylinders can provide. The SP-56 series provides 3.35 KW at 7,000 rpm; total weight of the carbureted version is 2.6 kilograms. The engine can be equipped with a generator or a starter generator on the rear output shaft. Hybrid applications are possible in which the engines are used only to generate electricity.
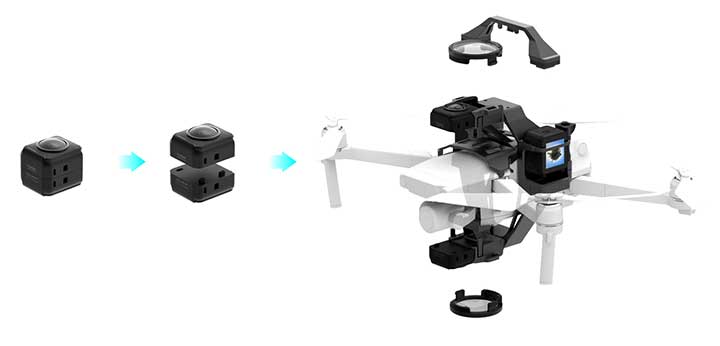
Two new small unmanned aerial systems (sUAS) are available to U.S. government defense and security markets. Vector and Scorpion form a 2-in-1 rucksack-portable system with an open source operating system, Auterion OS. The Scorpion tricopter can be used for dynamic urban environments and missions that require maneuverability and hover to collect intelligence, surveillance and reconnaissance (ISR) data. A tethering system enables 24/7 operations. By configuring the base fuselage with fixed wings and tail section, Scorpion transforms into Vector, a fixed-wing vertical takeoff and landing (VTOL) UAV for long-range, long-endurance ISR missions.
Insta360 ONE R is an interchangeable-lens action camera designed with three swappable Lens Mods for capturing different kinds of content. It has a Dual-Lens 360 Mod and a 1-Inch Wide Angle Mod co-engineered with Leica Camera AG. Advanced stabilization with Insta360’s FlowState algorithm achieves gimbal-like stabilization when shooting 360 degrees or with a standard wide angle lens. The 5.3K wide-angle lens can be swapped for a dual-lens setup that captures action in all directions at once. It captures brilliant 5.3K video and 19-megapixel photos even in complex lighting conditions. The ONE R is waterproof to 5 meters.
SUGUS — a European Commission project to promote European GNSS services for the integration of drones into the airspace — is conducting an online survey of stakeholders.
SUGUS, the European Commission’s project for the development of European GNSS (Galileo and EGNOS) services for U-space, is carrying out a survey to identify, gather and understand stakeholders’ needs, and to improve user experience of E-GNSS in complex operations and built-up areas.
U-space is a set of new services and specific procedures designed to support safe, efficient and secure access to European airspace for large numbers of drones.
SUGUS members invite all the stakeholders to take part in the survey, including suppliers of U-space services, manufacturers of unmanned aerial systems (UAS) platforms and GNSS receivers, UAS pilots and operators, public bodies, authorities and organizations, and centers for UAS testing and training.
The survey will be available until May 15.
The survey results will be used as a valuable input to tailor the E-GNSS Service Provision layer to specific drone missions’ needs, allowing a better mitigation of risks in complex operations like BVLOS (beyond visual line of sight) and UAM (urban air mobility), increasing safety and security.
Also, the points of view collected will help to define the requirements and then the implementation of a new E-GNSS-based API which will deliver live and forecast information about performance, coverage, alerts to users and more.
The API will be called upon by UTM service providers, UAS designers or UAS systems developers, and integrated in existing commercial solutions.
“The survey organized by SUGUS is a key element for E-GNSS Programs to capture user requirements of the drone community,” explained Miguel Aguilera, European Commission advisor. “The results will be used to enhance EGNOS and Galileo Service Provision targeting drone operations, increasing safety and security, and facilitating a swift and efficient deployment of U-space.”
SUGUS Project
SUGUS (Solution for E-GNSS U-Space Service) is a European Commission’s project to promote European GNSS services (EGNOS and Galileo) for the drone market and for the effective and safe integration of these aerial platforms in the airspace.
It is a European Union H2020 R&D project to be carried out by GMV (main contractor) with everis Aerospace, Defense and Security as co-leaders of a consortium also involving VVA Brussels, ESSP, FADA-CATEC and Unifly.
SUGUS will help to develop services geared towards the effective integration of drones into the airspace. A series of trials will be held to show the benefits of E-GNSS for drone operators, as well as its approval by aviation authorities.
New sensor provides easy-to-integrate, cost-effective, triple-redundant IMU hardware and software for guidance and navigation solutions in autonomous machines and vehicles
Photo: Aceinna
Aceinna has launched a new high-accuracy inertial measurement unit (IMU), the IMU383ZA. The sensor integrates triple-redundant, 3-axis micro-electromechanical system (MEMS) accelerometer and gyroscope sensors.
The IMU383ZA is an improved, pin-compatible version of Aceinna’s IMU381ZA. It offers high performance (1.3 deg/hr, 0.08 deg/root-hr) and a triple-redundant sensor architecture for ultra-high reliability.
The miniature module is factory-calibrated over the -40° C to +85° C industrial temperature range to provide consistent performance through extreme operating environments for a wide variety of applications.
Applications include automotive advanced driver-assistance systems (ADAS), autonomous systems, drones, robotics, agricultural, construction and other industrial machines.
The IMU383ZA provides a standard SPI bus for cost-effective board-to-board communications. Other features include advanced synchronization and a bootloader for field upgradeability.
Measuring 24 x 37 x 9.5 millimeters, the IMU383ZA integrates a triple-redundant architecture that — combined with the small, low-cost packaging — meet the challenging performance, reliability and cost requirements of the automotive market including the areas of autonomous vehicles, self-driving taxis/delivery vehicles, ADAS systems, electronic stability control and lane-keep assist applications.
The triple-redundant sensor architecture consists of three independent, 3-axis accelerometer and 3-axis gyros for excellent accuracy and reliability. By embedding a triple-redundant sensor array, the IMU383ZA uses Aceinna’s proprietary voting scheme to utilize only valid sensor data. Any defective sensor output or errant dataset will be ignored or de-rated in importance.
Railway solutions power asset management and infrastructure maintenance
Estonian Railways Ltd., a state-owned company responsible for Estonia’s railway administration, has selected Hexagon’s Geospatial division to implement a transportation system that will automate and digitize the railway’s infrastructure maintenance, construction and traffic management processes.
The combined asset management system and geographic information system (GIS) platform will help the company’s 700-plus employees efficiently manage assets and workflows.
Powered by Hexagon’s GeoTrAMS, a web-based system for tram and light-rail infrastructure, and GeoMedia, a flexible GIS management platform, Estonia Railway will be able to visualize assets on a map while integrating with other companies and external systems.
Hexagon’s state-of-the-art registry will serve multiple information systems and users at the same time, centralizing the use of asset and spatial data while avoiding data duplication and ensuring that users have access to the most up-to-date information.
“As a company, we are in a unique situation of simultaneously implementing Hexagon-specific spatial data modules for rail infrastructure management and Microsoft’s ERP for asset management, gathering and digitizing different fragmented data, unifying different workflows and applying new data management principles,” said Maia Sokk, innovation manager at Estonian Railways. “Based on our strategic goals for the next four years, we are significantly modernizing our traffic management systems. Implementing Hexagon’s technologies is an important link in this ambitious plan.”
Prior to selecting Hexagon, Estonian Railways used a fragmented system of disparate software applications to manage assets and infrastructure across its 750 miles of railroad, 129 platforms and 60 stations. With the new solution in place, Estonia Railway will be able to improve operational efficiency and transparency, better control expenses connected to the infrastructure and streamline administrative tasks.
“Estonian Railways is forward-thinking in its use of location intelligence for managing infrastructure and operations,” said Mladen Stojic, president of Hexagon’s Geospatial division. “We are excited to deliver an integrated solution that will help the railway effectively monitor and maintain its assets while also ensuring successful management of rail traffic, construction projects and services.”
Estonian Railways has been responsible for ensuring the smooth operation, management and maintenance of the country’s railway infrastructure since 1870.
Learn more about how Hexagon helps organizations close the gap between the geospatial and operational worlds with its transportation solutions.
This insight column from Septentrio explains the role of GNSS corrections in precise positioning. It explores the three most popular correction methods: RTK, PPP and PPP-RTK.
Let’s say you need reliable accurate global positioning in your technology. You do some research and decide to get yourself a multi-frequency GPS/GNSS receiver. You order an evaluation kit, but how to get your receiver to deliver the high accuracy that it promises?
GNSS receivers rely on external corrections to compensate for GNSS errors to achieve decimeter- or centimeter-level accuracy as fast as possible.
Correcting GNSS errors
GNSS-based positioning is calculated using a method that, by itself, is limited in accuracy due to several errors caused by GNSS satellites as well as the Earth’s atmosphere.
Even the advanced clocks on board GNSS satellites experience minute drifts that cause clock errors.
The movement of GNSS satellites is predicted as they orbit the Earth. These predictions are not perfect, which results in orbit errors.
Satellite equipment introduces small signal errors, which are modeled as satellite biases.
Atmospheric errors caused by distortions and delays are experienced by the signal as it passes through the Earth’s ionosphere (outer layer) and troposphere (layer near the Earth’s surface).
The local environment around the receiver as well as the receiver itself can introduce errors. For example, satellite signals can be reflected off buildings and tall structures (multipath).
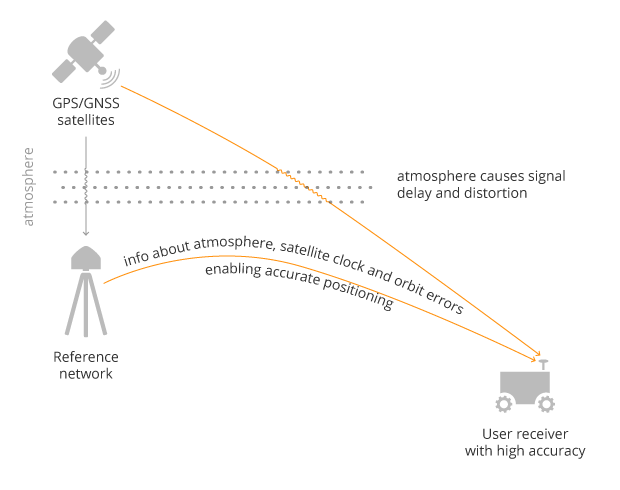
A GNSS receiver cannot correct satellite and atmospheric errors by itself; it relies on data provided by an external source. Clock and orbit errors are satellite-dependent, and so are the same around the world. Atmospheric errors, on the other hand, depend on the path the signal takes as it travels from the satellites to the user, differing depending on the receiver’s location.
To overcome both satellite and atmospheric errors, a reference station (also known as a base station) can be used. A reference station — a GNSS receiver installed at a fixed and precisely known location — estimates GNSS errors and sends them in the form of GNSS corrections to the user receiver. A reference network consists of interconnected reference receivers spread over a geographic area.
A user receiver gets data sent from a GNSS reference station to correct satellite and atmospheric errors. (Image: Septentrio)
Receiver-side errors can only be handled partially, by robust receiver technology and careful operation. Depending on which type of corrections are applied, it can take a few seconds to several minutes of initialization time for high accuracy to be achieved.
Types of corrections for high-accuracy positioning
Until recent years, RTK and PPP have been the established methods of providing GNSS corrections to user receivers. But the demand for high-accuracy positioning is on the rise, paving the way for new positioning techniques such as the hybrid PPP-RTK.
RTK: Highest level of accuracy. With the RTK (real-time kinematic) method, a user receiver gets correction data from a single base station or a local reference network. It then uses this data to eliminate most of the GNSS errors.
RTK is based on the principle that the base station and the user receiver are located close together (a maximum 40 kilometers or 25 miles apart) and therefore “see” the same errors. For example, since the ionospheric delays are similar for both the user and the reference station, they can be cancelled out of the solution, allowing higher accuracy.
While in the RTK method corrections are provided for a specific location, in the PPP and PPP-RTK methods, a correction model is broadcast to a larger area, but with slightly lower accuracy. To transmit this correction model, a message format called SSR (Space State Representation) can be used. There is some confusion in the industry about the term “SSR” since it is often associated with the newer PPP-RTK method. But be careful, since “SSR” is occasionally used as a buzzword to refer to traditional PPP services as well.
PPP: Globally accessible and accurate, but at a cost. Precise point positioning (PPP) corrections contain only the satellite clock and orbit errors. Since these errors are satellite specific, and thus independent of the user’s location, only a limited number of reference stations is needed around the world. Because atmospheric errors are not included in PPP corrections, only a lower accuracy level can be achieved with this method. Also, a longer initialization time is expected of up to 20-30 minutes, which may not be practical for some applications. PPP has been traditionally used in the maritime industry; today it has expanded to various land applications such as agriculture as a convenient way to get global GNSS corrections.
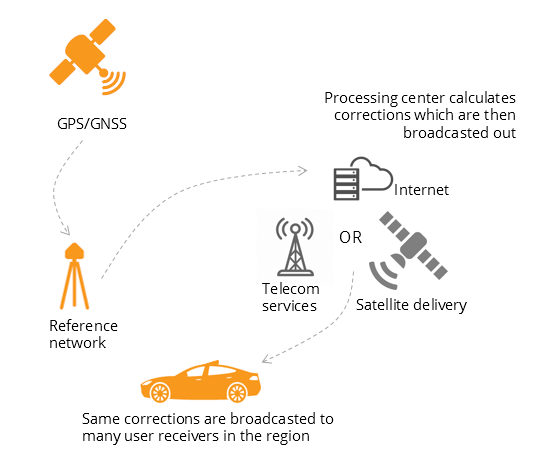
PPP-RTK: Best of both worlds? PPP-RTK (a.k.a. SSR) is the latest generation of GNSS correction services, combining near-RTK accuracy and quick initialization times with the broadcast nature of PPP. A reference network, with stations about every 150 kilometers (100 miles), collects GNSS data and calculates both satellite and atmospheric correction models.
As explained above, atmospheric corrections are regional, and so a denser reference network is needed than for PPP. These corrections are then broadcast to subscribers in the area via internet, satellite or telecom services. Subscribed receivers use the broadcast correction model to deduce their location-specific corrections, resulting in sub-decimeter accuracy.
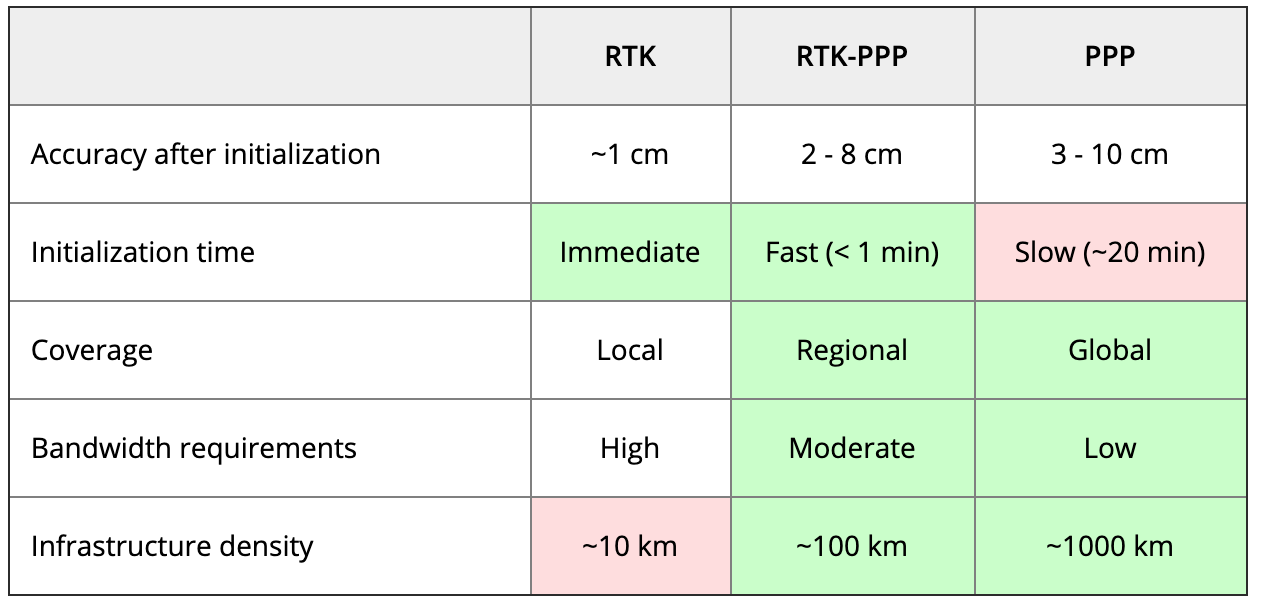
Comparing the three GNSS correction methods
The table below compares the three correction methods, highlighting their strengths and weaknesses.
Table: Septentrio
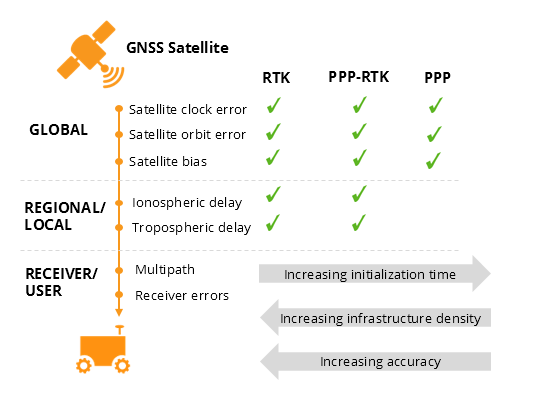
The infrastructure density and initialization time for all three methods vary with the different kinds of errors that are corrected. The broadcast nature of PPP-RTK and PPP, as well as the lighter infrastructure that they require, makes these methods scalable for mass-market applications.
Types of errors that are corrected by each of the three methods. (Image: Septentrio)
Some GNSS receivers also incorporate advanced positioning algorithms to compensate for receiver-side issues such as multipath (for example, see Septentrio APME+), jamming and spoofing. This adds reliability and robustness to high-accuracy positioning.
Getting GNSS corrections
Modern industrial receivers often get their GNSS corrections via a subscription service, delivered via internet (using NTRIP protocol), satellite or 4G/5G. Today, there is a boom in the correction-service market driven by high-accuracy demands of the automotive industry, automation and smart consumer devices. Automotive suppliers and many other new players are deploying infrastructure to set up services for centimeter-level positioning around the globe.
User receivers often get their GNSS corrections via a subscription service delivered via internet, satellite or 4G/5G. (Image: Septentrio)
PPP and PPP-RTK corrections can even be transmitted directly by the GNSS satellites, as in the Japanese CLAS service from the QZSS constellation, or in the planned High-Accuracy Service (HAS) from Galileo. Depending on the network density and quality of the error modeling, different initialization times and accuracies can be achieved. This means that positioning quality can vary from one service provider to another.
Major telecom companies such as Deutsche Telekom as well as the Japanese Softbank and NTT are equipping their infrastructure with GNSS receivers to enable new corrections services. 3GPP, which provides specifications for mobile telephony including LTE, 4G and 5G, now covers broadcasting of GNSS satellite corrections in its mobile protocol. Since reference receivers are becoming part of critical infrastructure, such as telecom towers, it is essential that they have a high level of security to protect them from potential jamming or spoofing attacks (for example, Septentrio AIM+ technology).
Which corrections are right for me?
The right correction service for your technology will depend on your location and service area, your accuracy and reliability needs, as well as your budget. Because the corrections market keeps expanding, it is now more important than ever that integrators or GNSS manufacturers assist you in selecting the best correction method for your industrial application.
If you choose a GNSS receiver which does not “lock” you to a certain correction service, you will be free to choose a correction method which is most suitable for your application and its location. Such “non-locking” open-interface receivers also offer customers flexibility to switch to another more beneficial service in the future, as correction methods keep evolving.
One industry important to the world’s fight and recovery from the COVID-19 pandemic is geospatial analytics. In response, the World Geospatial Industry Council (WGIC) has created an information hub for COVID-19 information.
“These are very uniquely challenging times for our industry. At the same time, our industry has stood up to assist the world, especially the key decision-makers and frontline workers to understand the scenarios on the ground,” said Harsha Vardhan, WGIC associate director. “Spatial analytics-based decision making has come to the forefront during these times.”
Governments are using location tracking in combination with personal data to track and combat COVID-19, and the use of location technology in conjunction with personal data is of high relevance and usage, Vardhan said. “This scenario brings before us the aspects of data privacy, data protection, and the role of geospatial information.”
In March, WGIC published a report titled “Geospatial Information and Privacy: Policy Perspectives and Imperatives for the Geospatial Industry.” Vardhan said the report is even more significant now. WGIC is hosting a webinar on the report on May 14 at 11 a.m. ET.
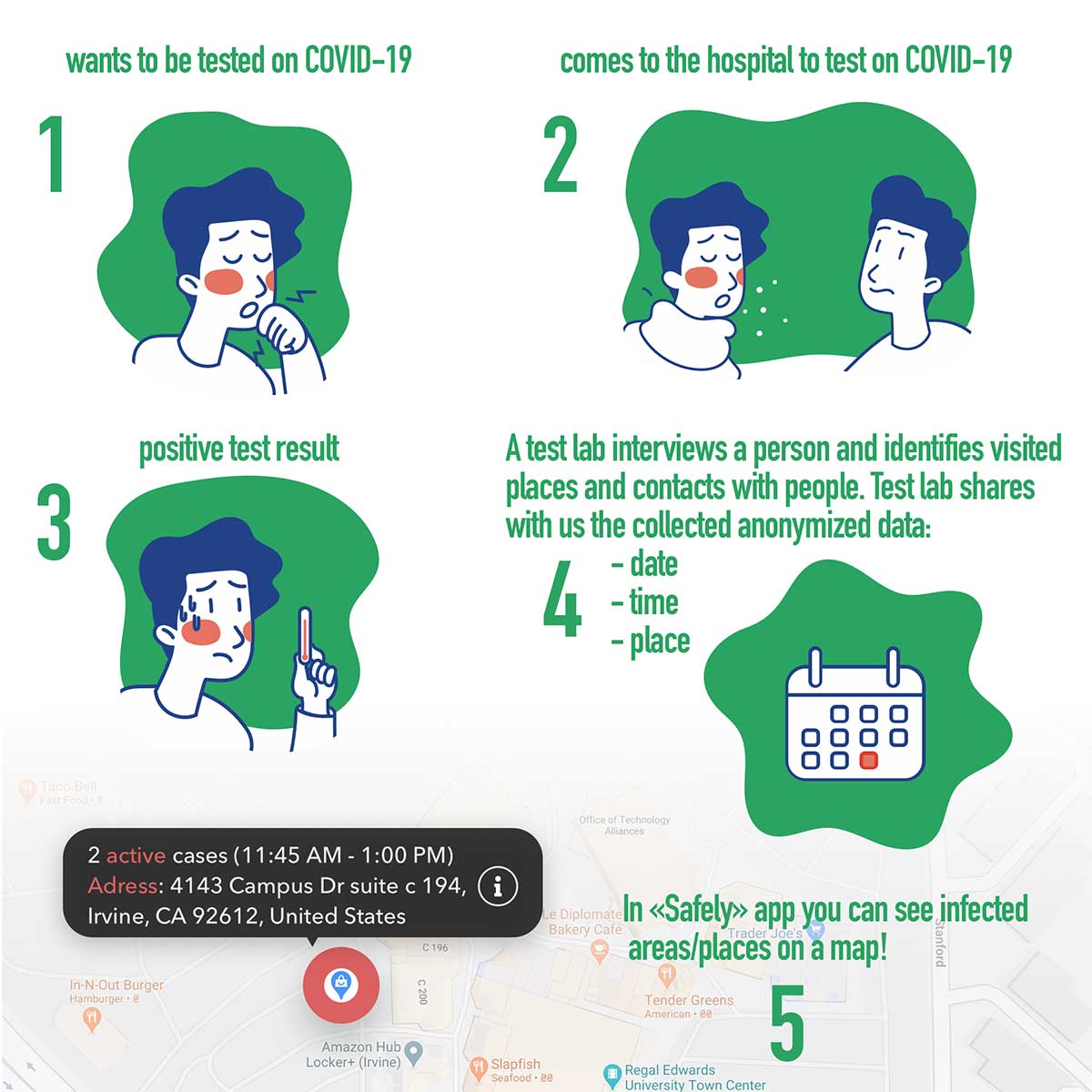
Vesedia Mobile Technologies is offering to deploy its location platform to help control the COVID-19 pandemic through tracking and dissemination of information about “at risk” infection areas and places, and times when they were known to have infection — a process referred to as contact tracing.
Vesedia is a technology startup with a suite of mobile apps for children and family safety based on a location-sharing platform and location-tracking artificial intelligence (AI).
“The platform would warn people that passed through these places at matching times,” explained Ruslan Shalaev, co-founder and team leader, Vesedia. Shalaev developed a popular app for family safety: Safely – Family Location; and serves as a lead research on user-location monitoring AI in an academic partnership with Binghamton University and Lviv National University.
The Safely – Family Location app could be used to disseminate data on infection areas, and access to the API would be provided for other application developers and sites, Shalaev said.
The platform would be applicable after the initial pandemic is contained. “It would help with restarting the economy and resuming normal business operations by providing a mechanism to track, control and suppress new outbreaks,” Shalaev said.
Data Sources
Under the plan, people that test positive to COVID-19 would be asked to provide information about public places they visited in the preceding days, and at what times. Individuals that provide the information can confirm that it’s accurate from their phone location history.
The information would be anonymized by healthcare officials, and entered into a database that would be publicly accessible via a website and mobile app.
Image: Vesedia
Mobile App
The mobile app aspect is especially valuable from information dissemination standpoint, because other people in “at risk” areas can receive automated alerts to self-quarantine and get tested based on their device location history.
The app is ready and available for download in Google Play and Apple App Store.
Image: Vesedia
Image: Vesedia
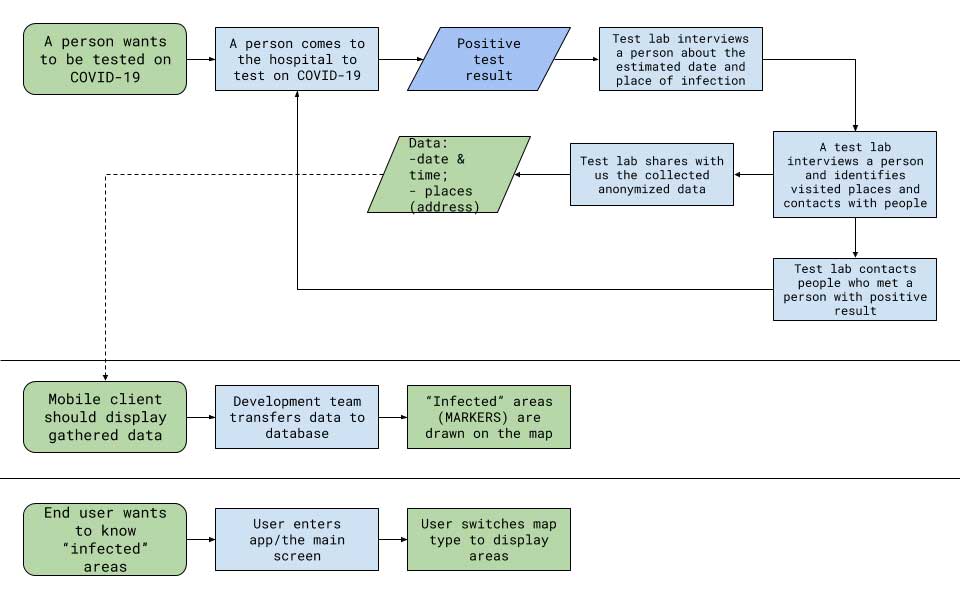
Workflow diagram
Workflow diagram. (Image: Vesedia)
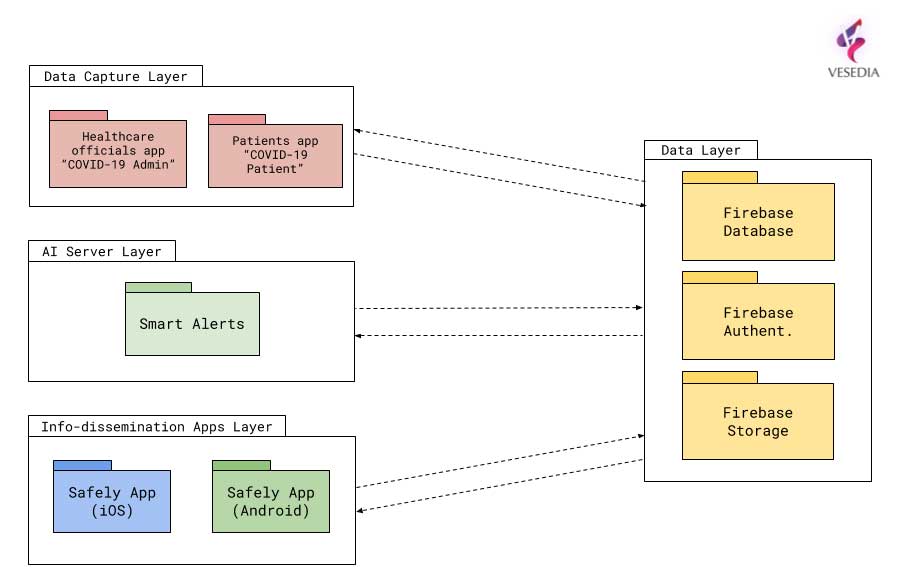
System architecture
System architecture. (Image: Vesedia)
Approach validity
The approach has been successfully applied in Singapore, but without active alerts, with dissemination of information being done manually. The Singapore government was able to contain the virus without shutting down businesses, schools, public transit and restaurants.
Vesedia location apps
Vesedia is a tech startup founded in 2016 by SUNY Binghamton Computer Science graduates. It developed SmartAI location tracking and sharing platform. Its apps include Safely – Family Location, Virtual Nanny, MeetCity – Live Events, Blind Date, Sponter – Social Network in partnership with Lviv National University and Binghamton University. The apps are available for download in the Google Play and Apple App stores.
Vesedia research on “Location-Based Behavioral Patterns Modeling” was published at Institute of Electrical and Electronics Engineers – Intelligent Data Acquisition and Advanced Computing Systems (IEEE/IDAACS) conference in Metz, France in 2019.
Launch of the RedKite drone. RedKite is a long-endurance sub-20-kg UAS designed to carry payloads of up to 5 kg. (Photo: Blue Bear Systems)
Blue Bear Systems Research Ltd. has successfully demonstrated a fully autonomous suite of multiple drone swarm assets under beyond-visual-line-of-sight (BVLOS) conditions.
The technology enables complex drone operations where multiple assets are able to carry out simultaneous tasks controlled by a single user to create a swarm effect.
The five fixed-wing drones clocked up to 15 hours of flying time, over four days, in challenging weather conditions. The swarm comprised a combination of Blue Bear’s Redkite and Cobra fixed-wing systems, which flew multiple simultaneous sorties from a test range in the northwest of England.
The drones were equipped with the latest automatic dependent surveillance-broadcast (ADS-B) technology, and the airspace was managed by Blue Bear’s airspace deconfliction software. All of the assets were controlled by a single operator from Blue Bear’s mission command control system in Bedfordshire, England.
“This is an exciting development for us, proving our ability to operate multiple drones, simultaneously, using the latest Blue Bear technology to deliver a swarm effect under BVLOS conditions,” said Ian Williams-Wynn, managing director of Blue Bear Systems.
Optical Zonu has introduced the ZonuSkyShot GPS tester, designed for quick testing during the critical installation phase of an antenna at a new site build or small cell integration.
The compact tester is designed for integrating one of Optical Zonu’s GPS solutions, but is equally capable of working as a neutral testing device.
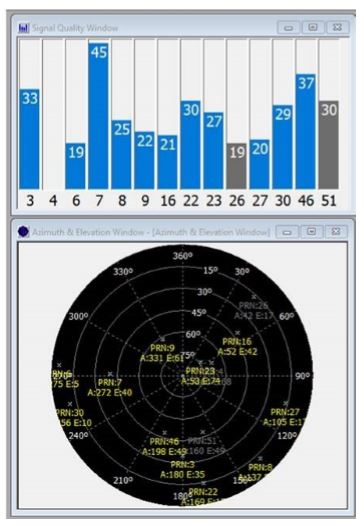
Fig. 1. Screenshot of ZonuSkyshot software output. (Screenshot: Optical Zonu)
The ZonuSkyShot is a compact GPS receiver that detects the presence of a GPS signal, indicated on the top-panel LED. The receiver can be accessed at the USB port on the base unit, allowing the user to see the available satellites by using the app provided with the system and available at the Optical Zonu website.
The receiver can simultaneously track up to 16 satellites while searching for new ones. Because of this, a problem can be found and mitigated when a GPS antenna is installed, rather than when hardware is being integrating further down the line. Close-out of projects can be indicated with with screenshots of satellite visibility via the micro-USB port to a laptop.
The app provides:
RF GPS signal presence
GPS antenna functionality
Optical transmitter functionality
Fiber connectivity
Optical receiver functionality
Pre-orders are now being accepted for the kit, which includes the handheld device with power supply, carrying case, jumpers and SMA cable.