General Motors (GM) is using Trimble RTX (real-time eXtended) technology as the high-accuracy GNSS/GPS correction source to deliver absolute positioning to vehicles equipped with GM’s Super Cruise hands-free highway driving system, now available on the 2018 Cadillac CT6.
GM customers using Super Cruise featuring Trimble RTX technology can have peace of mind on the road knowing that RTX plays an important role in maintaining lane position for hands-free driving on divided highways.
https://youtu.be/_rxW68ADldI
Super Cruise also uses precision lidar mapping data, a state-of-the-art driver attention system, and a network of camera and radar sensors.
Trimble RTX technology provides real-time, multi-constellation GNSS positioning capable of achieving better than 1.5 inches accuracy. Standard GPS signals can drift up to 25 feet, which could cause incorrect lane identification.
The 2018 Cadillac CT6 features Super Cruise hands-free driving technology for the highway. (Photo: GM)
Lane-level accuracy is a critical enabler in advanced driver assistance systems increasingly being used on highways. When used in conjunction with high-definition maps, cameras, radar and inertial sensors, Trimble RTX improves lane-level positioning performance for semi-autonomous and autonomous vehicles.
Trimble has a long history of pioneering automation and vehicle autonomy to improve productivity — from providing positioning solutions for some of the earliest robotic applications in the 1990s to delivering automated steering for farm tractors, automated blade control for earthmoving equipment and providing advanced positioning technology for fully autonomous trucks.
Trimble is now enabling semi-autonomous operations for passenger vehicles with Trimble RTX technology, delivering high-accuracy GNSS corrections via a global network to support absolute vehicle positioning in combination with other sensors and inertial dead-reckoning.
Trimble’s RTX technology uses signals captured by more than 100 Trimble GNSS reference stations around the globe. Trimble RTX corrects the signals for atmospheric conditions, satellite orbit and time synchronization errors and then sends those signals to GM vehicles with Super Cruise via OnStar 4G LTE cellular.
The Trimble network is supported by redundant servers that are monitored 24/7 by a team of network engineers and IT specialists ensuring optimal signal performance and reliability for drivers who will depend on it.
“Through our collaboration, the combined technologies of GM and Trimble will transform the way the world drives,” said Patricia Boothe, vice president of Trimble’s Advanced Positioning Division. “Trimble RTX is now influencing how we interact with our vehicles and the environment around them — helping to minimize driver fatigue and improve the assisted driving experience.”
After years of development and an intensive beta testing phase with key partners, Qinertia post-processing kinematic software is now being offered by SBG Systems.
Qinertia has been designed to help surveyors get the most of their surveys, according to SBG Systems.
After the mission, Qinertia gives access to offline real-time kinematic (RTK) corrections from more than 7,000 base stations in 164 countries — and always up-to-date. By creating a virtual base station near a project, the software delivers the highest level of accuracy without having to set up your own base station.
An advanced tight coupling algorithm has been designed by SBG Systems to deliver the highest accuracy and maximize RTK availability. Trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions, especially in GNSS challenging environments (urban canyons, forest, etc.).
With advanced quality control indicators such as standard deviation, separations and GNSS quality feedback, Qinertia provides full understanding of a survey. With Qinertia, surveyors can quickly identify and solve issues such as mechanical installations or sensor alignment.
Qinertia has been designed to be easily integrated in a production workflow. It supports RINEX industry standard, and Septentrio, Novatel and Trimble native binary format.
A powerful ASCII export feature allows seamless integration with any third-party software. SBET and Google Earth are also supported for improved interoperability.
GEO Business, the United Kingdom’s largest geospatial exhibition and conference, has announced that registration is now open.
The GEO Business show has grown every year since its inception, and the 2018 show looks set to be the most successful show to date with more exhibition space and a brand new seminar program. The event will return to the Business Design Centre, in London, UK, May 22-23.
Since its record-breaking 2017 event last year, which welcomed 2,386 geomatics and geospatial professionals from around the world (a 48 percent increase since the launch in 2014), the exhibition has expanded onto the upper level. Exhibitors span the entire geospatial industry, showcasing cutting-edge technology and solutions that will mold the future of the industry.
The 2018 GEO Business show will expand to the second level of the Business Design Center. (Photo: GEO Business)
Confirmed exhibitors for 2018 include Survey Solutions Scotland, Land Registry, GAP Group, Phase One, Viametris, Surphaser/ MD3D, DHF Satellite and Ordnance Survey Ireland.
New for 2018 is a free-to-attend seminar program designed to demonstrate the remarkable impact geospatial technologies and solutions on the global environment. The program will feature case studies from companies demonstrating how they are reducing costs and risk while increasing productivity.
The 2017 GEO Business exhibit. (Photo: GEO Business)
The latest in augmented reality, building information management (BIM), geospatial information systems (GIS) and big data, laser scanning, mobile mapping, remote sensing and satellites, smart cities, surveying, UAVs, virtual reality and visualization will feature within the fields of architecture and construction, commercial property, environmental, equipment theft, floods, forestry, heritage, highways, hydrography, mining, rail and tunneling.
With geospatial technology now impacting on more and more industries, GEO Business is attracting visitors from a wider range of industry sectors than ever before.
“The geospatial industry is experiencing a huge transformation, everywhere you look at the moment you bare witness to the term ‘geospatial,’” Show Director Caroline Hobden said. “Innovative technology is steadily making its presence known in everyday life, whether it is through the revolutionary capabilities of augmented/virtual reality or the extraordinary data recorded by drones to name just a few, the world is sitting up and taking notice.
“Even the U.K. government budget made mention of geospatial at the end of last year and as a result we excitedly await further announcements about the Geospatial Commission whose focus will be on location aware technologies revolutionising the digital economy.”
The exhibition and seminar program will run alongside a strategic senior-level conference of invited speakers presenting and debating the role of geospatial in powering the Fourth Industrial Revolution, said GEO Business. The Fourth Industrial Revolution is changing how we live, work and communicate. It is reshaping government, education, healthcare and commerce — almost every aspect of life. The conference will celebrate, challenge and develop the role that geospatial has to play in maximizing the digital economy as part of this revolution.
Visitors will also have the unique opportunity to attend the well-established commercial workshop program hosted by exhibitors demonstrating their latest products and services and a full line-up of innovative social activities designed for informal networking with colleagues old and new.
The exhibition, workshops and seminars are free to attend. There is a fee-to-attend the conference with an early-bird discounted rate for registrations before April 16. Public sector, association members and student discounts are also available. Visitors are encouraged to register online in advance to beat the queues onsite.
For more information on stand sales or visitor registration, contact Caroline Hobden at [email protected] or call +44 (0)1453 836363.
Joseph Cione, hurricane researcher at NOAA’s Atlantic Oceanographic and Meteorological Laboratory and principal investigator of NOAAs Coyote project, holds the UAV in front of NOAAs P-3 aircraft at MacDill Air Force Base in Tampa, Florida. (Photo: National Oceanic and Atmospheric Administration) (PRNewsfoto/Raytheon Company)
Developed for the military, Coyote is a small, expendable UAV that’s air- or ground-launched into environments too dangerous for manned aircraft. The system can fly for more than an hour and up to 50 miles from its host aircraft.
“Weather forecasters are able to better understand storm behavior and improve hurricane models based on the real-time information provided by our Coyotes,” said Thomas Bussing, Raytheon vice president of Advanced Missile Systems. “Coyote UAVs are collecting and delivering robust storm data that could ultimately save lives.”
In 2017, NOAA researchers deployed six Coyote UAVs to track and model Hurricane Maria. Launched from a NOAA WP-3D Orion hurricane hunter aircraft, the Coyotes flew directly into the storm, giving researchers an unprecedented view of Maria.
Traditional weather instruments are dropped from planes and capture only a snapshot of storm behavior, but Coyote’s winged design allowed it to linger and return to key areas of a hurricane to gather more data and transmit it near-real-time to researchers.
“We think unmanned technologies that explore dangerous and difficult to observe regions of the storm may improve our physical understanding, provide enhanced situational awareness and might ultimately improve the accuracy of hurricane intensity forecasts in the future,” said Joseph Cione, a hurricane researcher at NOAA’s Atlantic Oceanographic and Meteorological Laboratory and principal investigator of NOAA’s Coyote project. “The Coyotes we deployed in Hurricane Maria collected critical, continuous observations in the lower part of the hurricane, an area impossible to reach with manned aircraft.”
The Coyote UAV was first deployed in 2014, when NOAA launched four of the systems into Hurricane Edouard, a Category 3 storm. Scientists on board the aircraft collected meteorological data in both the eye of the storm and the surrounding eye wall.
Assisting safer autonomous driving, STMicroelectronics has introduced a multi-frequency GNSS receiver chipset suitable for safety-critical automotive applications and high-accuracy positioning at the decimeter and centimeter-level for precise point positioning (PPP) and real-time kinematic (RTK) applications.
Traditional in-car navigation systems help drivers reach their destinations using receivers and commercial satellite services that allow positioning accurate to within a few meters.
With increasing use of autonomous systems such as lane-departure warning (LDW), adaptive cruise control (ACC), valet parking and auto-pilot, greater accuracy is needed to ensure safety and reliability, in combination with proximity sensors such as cameras, radar, lidar and others, to monitor the driving environment automatically. Fully self-driving vehicles of the future will also demand high-accuracy positioning.
By tracking satellites of all GNSS constellations simultaneously on at least two of the frequencies used by each system, ST’s automotive-quality Teseo APP (automotive precise positioning) receiver provides high-quality raw GNSS data for PPP and RTK algorithms, which allows accurate positioning and rapid convergence time worldwide.
In addition to its high accuracy, the receiver monitors the integrity of the satellite data to alert the system if accuracy is degraded for any reason. This permits Tier-1 manufacturers to certify safety-critical systems in accordance with the automotive industry functional-safety standard, ISO 26262, up to the highest Automotive Safety Integrity Level (ASIL).
Teseo APP also integrates a secure microcontroller for secure system boot and data-output authentication to keep sensitive data safe from attack.
Launched alongside Teseo APP, ST’s Teseo V chip provides equivalent multi-frequency precise positioning in a simplified device for non-safety-critical applications where integrity assurance is not required.
“High-accuracy satellite positioning makes autonomous driving safer, smoother, and more reliable,” said Antonio Radaelli, director, Infotainment Business Unit, STMicroelectronics. “Our newest Teseo APP GNSS chip combines extreme accuracy and precision with industry-unique integrity assurance for use in safety-critical applications.”
Teseo APP eliminates errors by tracking all available GNSS signals in multiple frequency bands, such as the GPS and GLONASS, Galielo, BeiDou, QZSS, and IRNSS L1, L2, and L5 frequency bands, and the Galileo E6 signal that contains PPP correction data to allow worldwide decimeter-level accuracy.
Other techniques for enhancing accuracy have included differential systems reliant on a combination of ground base-station signals as well as satellite signals, or techniques such as RTK, which generally require a denser reference station network.
The new Teseo chips make high-accuracy affordable for autonomous driving through a combination of tracking up to three constellations simultaneously over two frequency domains. These multi-frequency combinations bring reliable GNSS ionospheric and multipath modeling in most environments, allowing accurate positioning with faster convergence time for automotive applications, where timing is critical.
ST is now supplying product samples to lead customers who are developing autonomous-driving systems expected to appear first in high-end vehicles launched in 2020/2021.
Visitors to Mobile World Congress 2018 in Barcelona, Feb. 26 to March 1, can see Teseo APP at the ST booth, Hall 7, Stand 7A61.
In mid-2017, Talen-X and Skydel engineers began to conceptualize a GNSS simulation system emanating from their BroadSim platform for the purpose of fortifying anechoic chambers.
Over the next six months, Talen-X and Skydel designed, built, tested and delivered an anechoic chamber simulator capable of simultaneously generating multi-GNSS jamming and spoofing signals.
BroadSim Anechoic can be used to support a wide variety of operational tests.
“Our new Anechoic Chamber solution will radically change the way in which mission critical platforms and systems are tested because we are enabling our customers to create real-world threats,” said Talen-X Chief Technology Officer Tim Erbes said. “Not only will BroadSim Anechoic be able to emulate real-world threat scenarios, it will be easier than ever before to create and simulate these environments.”
BroadSim Anechoic is used to test GNSS spoofing and jamming in an anechoic chamber. The BroadSim Controller is at the heart of the system running Skydel’s SDX software suite. Using SDX, users can create advanced scenarios that include both jamming and spoofing signals.
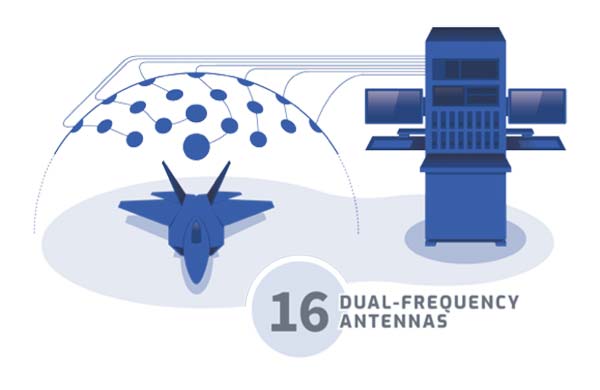
The 16 software-defined radios (SDRs) each with dual transmit ports (32 total outputs) can be configured to output GNSS or jamming signals, giving users flexibility to run test after test. The transmit chains include the hardware to power 16 dual-frequency antennas. The included GNSS receivers allow users to monitor the environment inside the chamber, providing confidence that tests are running correctly.
The BroadSim Anechoic can also be used in controlled radiation pattern antenna (CRPA) testing. Many ground-, airborne- and water-based platforms are transitioning to using CRPAs because of their added jamming resiliency and significant tracking advantages in degraded environments.
Validation and real-world testing is critical to understanding and characterizing the mitigation these antennas can add in highly degraded areas. By using BroadSim Anechoic, users have the ability to create representative jammers with real-world characteristics (modulations, frequencies, angles, power levels, etc).
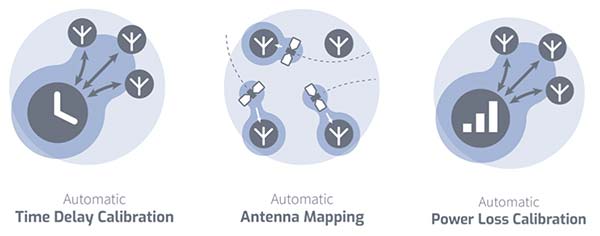
“Skydel developed an innovative approach for time offset calibration between multiple transmitting antenna using a COTS Software-Defined Radio (SDR),” said Skydel Solutions Chief Technology Officer, Iurie Ilie. “This approach allows for very precise measurements and adjustments (better than 100ps) to be done automatically before simulation start. At the same time, transmitting signal power is automatically adjusted to keep the power offset at receiving antenna better than 0.1dB.”
BroadSim Anechoic takes advantage of state-of-the-art software defined radios (SDR) for RF up-converting while signal IQ generation is done using high performance commercial-off-the-shelf (COTS) graphics-processing units (GPU). The ability to generate the IQ data in software (using the GPU) as opposed to hardware (FPGA) significantly reduces the cost while maximizing capability, value, and time to market.
BroadSim Anechoic has the capability of powering up to 16-dual frequency antennas requiring 32 RF transmit outputs. The architecture used for this system required the ability to receive signals in a manner such that precise processing could be done on the receive signal.
The SDR selected for this application has one receiver channel for every transmit channel giving BroadSim Anechoic 32 RF receive ports. Innovative software techniques have been developed enabling the accurate time and power calibration for each antenna transmit chain using the SDR receive ports.
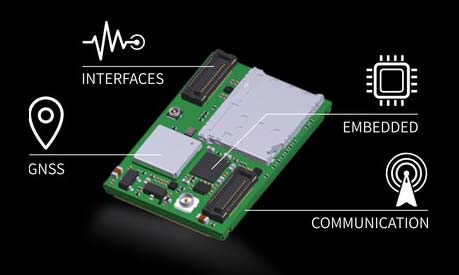
OriginGPS has chosen Gemalto’s Cinterion LTE-M wireless module to build its latest miniature OriginIoT system. Gemalto, a digital security company, designed the module for low-power applications requiring high security.
OriginIoT systems are generic cellular internet of things (IoT) systems that simplify IoT product development and slash development resources.
The systems include communication hardware, a GNSS module, embedded software and a novel interface to OriginIoT add-ons that accommodate multiple sensors and other peripheral devices.
OriginGPS signal-to-noise technology is leveraged to deliver superior GNSS and cellular matching, facilitating excellent performance in noisy environments, while the OriginSmart software enables cloud-based programming, relieving developers from writing embedded code.
The OriginIoT LTE-M system (ORG2101) has a 15 percent smaller footprint than the previous 2G and 3G models, and will be pre-certified with selected operators.
The low-power, wide-area Cinterion LTE-M module supports more than 10 frequency bands from a single hardware device, eliminating the need for multiple variants. The module protocols can run on the same hardware, thus providing a future-proof path for additional OriginIoT models.
“To save resources and stay competitive, such easy to develop low power solutions are essential for today’s IoT products,” said Andreas Haegele, senior vice president of IoT products for Gemalto. “We are glad to see that OriginGPS is expanding the market by offering accessible, affordable IoT products that are backed by Gemalto reliability and high quality,”
“We designed the OriginIoT LTE-M system to address market pains, and so our new offering includes low power consumption, superb GNSS/cellular matching, interfaces to multiple connectors, and software to enable developing from the convenience of the cloud,” said Robert van Tilburg, VP Global Sales and Business Development of OriginGPS. “These features serve to simplify and shorten IoT projects. Gemalto’s Cinterion IoT module enables OriginGPS products to retain their world’s smallest footprint, while enhancing their security and extending end-product life.”
OriginGPS will be showcasing its GNSS modules and OriginIoT systems at Embedded World, Feb. 27 – Mar. 1, in Hall 3, Booth 121.
u‑blox has rolled out the u-blox F9 technology platform, which was designed to deliver high-precision positioning solutions for mass market industrial and automotive applications.
The platform combines multi-band GNSS technology with dead-reckoning, high-precision algorithms, and compatibility with a variety of GNSS correction data services, to achieve precision down to the centimeter level.
u‑blox F9 paves the way for the next generation of high precision navigation, augmented reality, and unmanned vehicles, the company said.
The u-blox F9 platform will underpin the next wave of u‑blox positioning modules targeting mass market industrial and automotive applications. It uses GNSS signals in multiple frequency bands (L1/L2/L5) to correct positioning errors caused by the ionosphere and deliver fast time to first fix (Fast TTFF).
Its ability to receive signals from all GNSS constellations (GPS, GLONASS, Galileo, Beidou) further improves performance by increasing the number of satellites visible at any given time. Stand-alone u‑blox F9 solutions robustly achieve meter-level accuracy.
To achieve centimeter-level accuracy, u‑blox F9 offers optional on-chip real-time knematic (RTK) technology. In addition to offering an open interface to legacy GNSS correction service providers, it supports the main GNSS correction services, bringing RTK high-precision positioning to the mass market.
“High precision is the next frontier in positioning for mass markets, with countless applications in need of a robust and scalable high precision positioning solution. u‑blox F9 provides the hardware and integrated software components to address these needs,” said Daniel Ammann, executive director of positioning product development at u-blox.
Optimized for low power consumption, the u‑blox F9 platform sets a high standard for security with built-in jamming and spoofing detection systems that protect against intentional and unintentional interference. Dead-reckoning technology based on inertial sensors extends high-precision performance to otherwise challenging urban environments.
Automotive applications of the technology include lane-level navigation for head-up displays and vehicular infotainment systems as well as for vehicle-to-everything (V2X) communication, a prerequisite for highly automated and fully autonomous vehicles.
In the industrial realm, u‑blox F9 will enable mass adoption of commercial unmanned vehicle applications including drones and ground vehicles such as heavy trucks or robotic lawnmowers.
The u‑blox F9 platform’s technology will be showcased at Embedded World in Nuremberg, Germany from Feb. 27-March 1 at Booth #3-139. Product samples will be available later in the year.
The military is always looking at new techniques and technology for deriving position and, it seems, every few years signals of opportunity (SOOP) becomes fashionable again.
In broad terms, SOOP refers to the use of any signals for navigation, which are not normally intended for navigation. This might mean TV or radio broadcast signals, cellular network signals, or anything else you can receive.
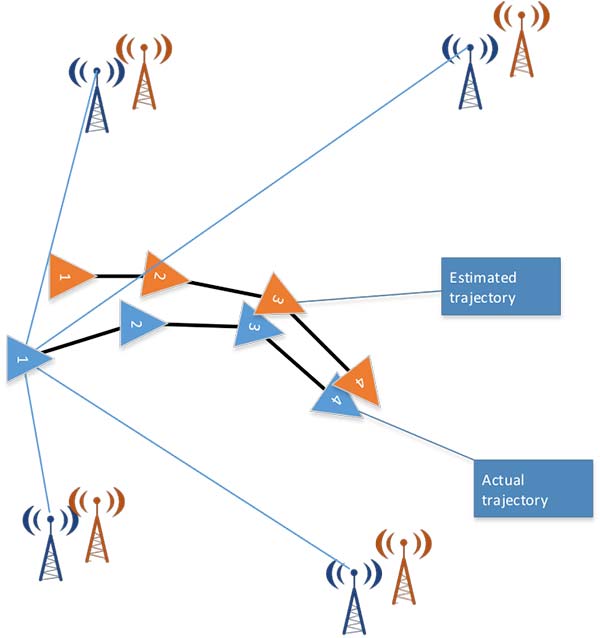
Figure 1. Navigating using opportunistic signals, such as phone, TV and radio transmissions. (Image: Michael Jones)
The promise of SOOP
In the quest for resilient positioning and navigation, SOOP certainly sounds attractive. When GPS goes down, why not simply continue to navigate by receiving digital TV signals instead? Why not receive a whole pile of different signals, and make yourself virtually immune to jamming?
You can even turn jamming from a problem to a solution. If someone does decide to turn on a bunch of jammers, why not use the jammers themselves as signals of opportunity, and position yourself using those? With so many possibilities, it’s no wonder SOOP excites people. Certainly it’s of great interest to the military of many countries.
Let’s dip our toes into the world of opportunistic navigation.
What signals might we use?
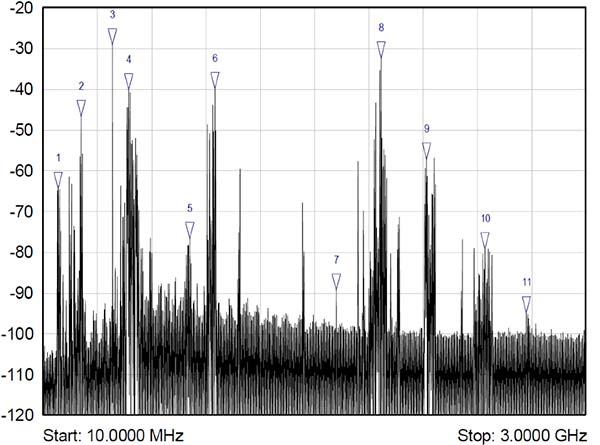
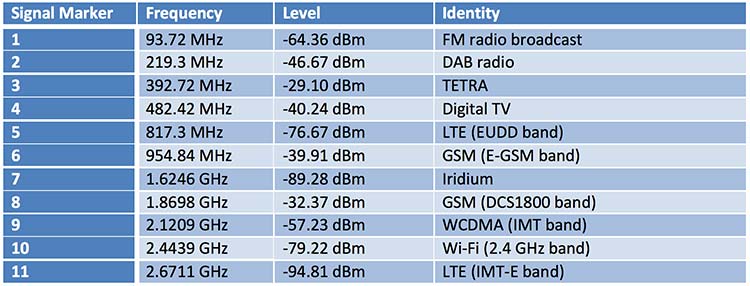
The figure below shows what we get if you use a spectrum analyzer to quickly sample what’s on the airwaves in the UK, in this case looking fairly coarsely from 10 MHz to 3 GHz. A number of candidate signals immediately present themselves, which are labeled 1 to 11 and identified in the table.
Figure 2. Plenty of opportunistic signals are out there. (Image: Michael Jones)
There are, of course, many more signals-of-opportunity out there, but this illustrates a few of the more visible ones. How do we go about using these signals for positioning ourselves?
Bringing in defense techniques
For decades, one of the principle requirements in electronic warfare (EW) has been to geolocate enemy transmissions. This has given rise to a plethora of techniques for determining location, such as received signal strength (RSS), angle-of-arrival (AOA), time-of-arrival (TOA), time difference of arrival (TDOA), frequency difference of arrival (FDOA), and so on.
In a positioning application, we have the reciprocal problem: instead of trying to geolocate a transmitter relative to ourselves, we are trying to geolocate ourselves relative to a set of transmitters. But of course we use the same techniques: GPS is an excellent example of a TOA system.
Let’s look at the basics of TDOA. A signal s arriving at location 1 can be expressed as
where A1 is an amplitude scaling to account for attenuation over the path, n1 is additional noise, and d1 is the signal delay time. We can repeat the equation for further locations:
Usually we designate one location as the reference, in which case we can rewrite the above equations as:
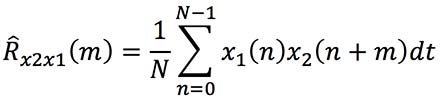
The first problem is to determine D, the time difference of arrival. There are many ways to do this, but a popular method is to perform generalized cross-correlation:
Or, in a realizable digital form:
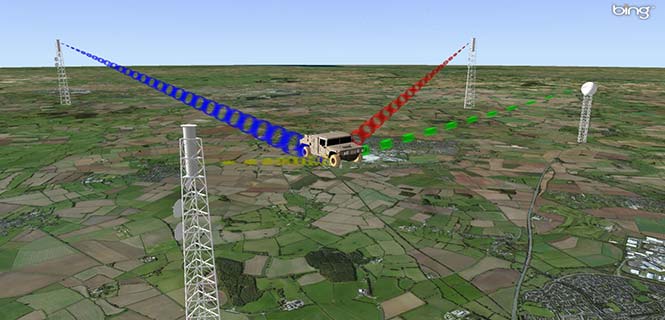
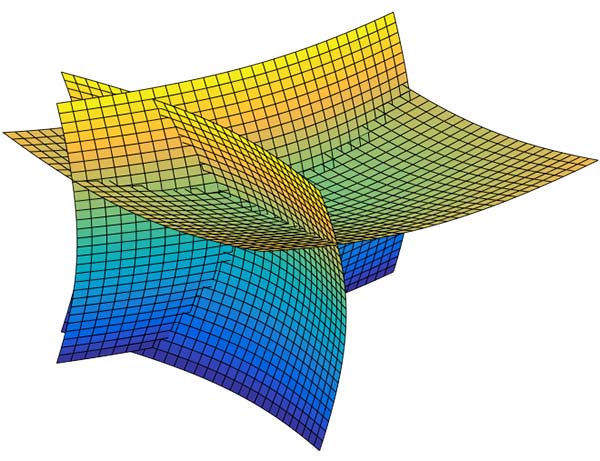
Finding the peak of this function gives us our estimate of the time difference D. It’s a little bit more involved in practice, as we would normally apply filtering functions to improve the TDOA resolution, but you get the idea. Each TDOA measurement gives a set of possible locations that form a hyperboloid. With three stations, we will have two hyperboloids, the intersection of which gives a set of possible locations along a hyperbola. The addition of a fourth signal allows us to plot three hyperboloids, from which we can then determine position.
Figure 3. Positioning using TDOA involves solving for the intersection of hyperboloids. (Image: Michael Jones)
There are various ways to solve for the hyperbolic intersections. With only four measurements it is possible to compute the solution analytically, but with many measurements an iterative approach or minimum mean squared error technique is often used.
TDOA, when used properly, can form the basis of a highly accurate positioning system. A number of navigation systems utilize TDOA technology, such as LORAN and its variants.
Now let’s consider angle-of-arrival. AOA techniques generally make use of an antenna array to provide spatial diversity, allowing the direction of a source transmission to be determined. Measured angles to multiple transmitters then allows triangulation to be performed and the position computed. There are some advantages to AOA techniques, when compared to TDOA: position can be computed with as few as three signals, there is no requirement for time synchronization in any form, and narrowband signals can be used without loss of accuracy. Disadvantages include larger physical size due to the use of an array of antennas, and potentially more susceptible to environmental effects such as multipath.
Classical AOA methods include Capon’s method, but since the 1980s the preferred techniques have often been signal subspace methods such as Multiple Signal Classification (MUSIC), Estimation of Signal Parameters by Rotational Invariance Techniques (ESPRIT), and variants of these techniques. The most well known of the subspace methods, MUSIC, performs an eigendecomposition of the sample covariance matrix given by:
Once the signal and noise eigenvectors have been separated the array manifold is projected into the appropriate subspace to yield the MUSIC surface:
The peaks of the function P, give us the direction-of-arrival of any signals. From these multiple lines of bearing we can perform triangulation, and derive our position.
We’ve looked at TDOA and AOA methods, which are just two of many techniques that can be used to process signals-of-opportunity to derive position. But there are some perceived drawbacks to navigation by SOOP. By definition, SOOP makes use of transmitters that are uncooperative, and not generally designed with navigation in mind.
For TDOA you are dependent on signals that are transmitted synchronously (or else you need a separate source of reference), which may or may not be the case. You also need to know the locations of the various transmitters, for example the coordinates of any GSM base stations, digital TV transmitters, and so on. It may be difficult to obtain this information, especially in some parts of the world. But whilst it certainly helps to have this information, it isn’t entirely necessary. It is possible to both position yourself, and build up a map of the transmitter locations, without a-priori information.
SLAM
Simultaneous localization and mapping (SLAM) is a field popular in the autonomous vehicle and robotics communities. It’s often described as a machine-learning concept, which aims to solve the problem of positioning oneself within a map, whilst simultaneously constructing and updating that map. There are a pile of techniques and algorithms that have been applied to the problem, including the good old Kalman filter, and the particle filter.
In basic SLAM, you use a state vector to store an estimate of your position (and often orientation as well), just as you would in a typical GPS receiver. However, in SLAM, we also store estimates of the transmitter positions (called “features” in SLAM terminology). If we want to localize ourselves in a global coordinate frame it does mean we need an initial estimate of our position from some other means, like GPS. Otherwise we can only localize ourselves within the map we are generating.
From our initial position estimate, we then move in some way. We then estimate our position again, perhaps using some form of dead reckoning technique, like inertial or visual odometry. Together with our motion model, this forms the prediction phase of the Kalman filter. We perform the measurement phase by re-measuring any features (our transmitters of opportunity), along with any new ones.
Figure 4. Basic SLAM concept: simultaneously estimate the locations of both the vehicle and the transmitters of opportunity. (Image: Michael Jones)
If you know about Kalman filters, you might spot one of the problems with SLAM: As the number of features increases, the size of the state vector becomes larger, until you end up with huge matrices that are very time-consuming to solve. The solution time is a quadratic function of the number of state variables. For this reason, it is often necessary to constrain the problem in some way: perhaps by limiting the number of transmitters we keep track of.
But when done properly, SLAM is a powerful technique for signals-of-opportunity navigation.
Is SOOP worth it?
We’ve seen that, by using a variety of techniques, almost any radio signal can be used for opportunistic navigation purposes.
One disadvantage of SOOP is that it can require complex hardware to do it well. If you truly want to use all the opportunistic signals out there, then you need a receiver that can handle a very wide range of frequencies. You also need an antenna or set of antennas that can do the same.
When resilient PNT is a critical military requirement, you cannot afford to rely on signals that you don’t control. SOOP is also highly dependent on where you are. There aren’t many opportunistic signals at sea or in the desert, compared to in the urban environment (perhaps the odd satellite signal, or HF signal).
So SOOP is unlikely to become a primary technology for the military. But it does have the potential to be a powerful augmentation to GNSS, and it certainly deserves a place in the PNT kit bag.
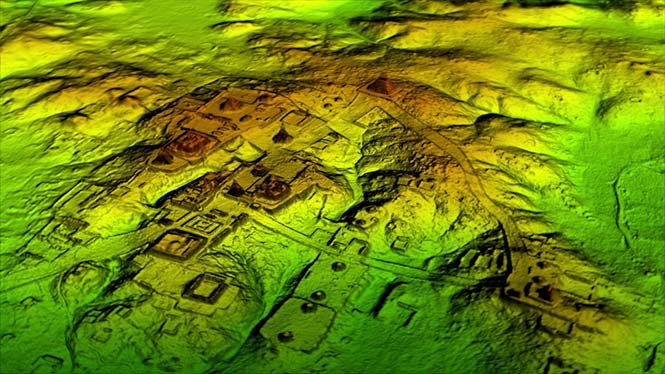
Lidar and UAV technology has revealed hundreds of previously unknown Mayan ruins in the Guatemalan rainforest.
The Optech Titan stripped away overlying vegetation to reveal extensive Mayan ruins in Guatemala’s rainforest. (Image: Teledyne Optech)
In what is considered biggest aerial lidar survey in the history of archaeology, a vast and complex civilization has been discovered.
The University of Houston’s National Center for Airborne Laser Mapping (NCALM) used Teledyne Optech’s Titan sensor to identify raised highways, and complex irrigation and terracing systems.
The jungle of Central America is one of the last great frontiers of archaeology, according to National Geographic, which covered the new finds in a recent documentary, Lost Treasures of The Maya Snake Kings.
After the collapse of the Mayan civilization, its cities and monuments were quickly covered by thick rainforest, hiding it from airborne observation and making it very difficult to survey on foot. Over decades of work, the ancient civilization has gradually been revealed. But now technology is set to change everything.
Lidar digitally removes the forest canopy to reveal ancient ruins below, showing that Maya cities such as Tikal were much larger than ground-based research had suggested. (Photo: National Geographic)
Flying high above the rainforest, the Titan’s lasers penetrated the canopy to collect almost a million data points per second from the forest floor, giving archaeologists a “bare earth” view of the structures underneath.
Having covered 2,100 square kilometers, the Titan’s data revealed massive amounts of ruins hidden below the forest, showing that their urban centers were significantly larger than archaeologists had previously thought.
“Lidar is revolutionising archaeology the way the Hubble Space Telescope revolutionised astronomy,” Francisco Estrada-Belli, a Tulane University archaeologist, told National Geographic. “We’ll need 100 years to go through all [the data] and really understand what we’re seeing.”
(Image: Teledyne Optech)
“We are incredibly proud and excited that our award winning Titan multispectral lidar sensor has contributed to this spectacular discovery,” said Michel Stanier, EVP and general manager of Teledyne Optech. “The Titan’s ability to strip away overlying vegetation and map wide areas very quickly and accurately makes it an important tool for archaeologists, and we expect to see many more discoveries coming from it and our other airborne laser terrain mappers.”
The Optech Titan multi-spectral lidar sensor incorporates three independent laser wavelengths into a single sensor design, with beams at 532, 1064 and 1550 nanometers (0.5/1.0/1.5 microns) and a ground sampling rate of 300 kHz per beam.
Because Titan uses both green and infrared channels, it is capable of simultaneous water-depth mapping and high-precision 900-kHz topography.
Titan can also be used for purposes such as vegetative and forestry applications, which require multiple wavelengths for improved classification accuracy and carbon credit counting initiatives.
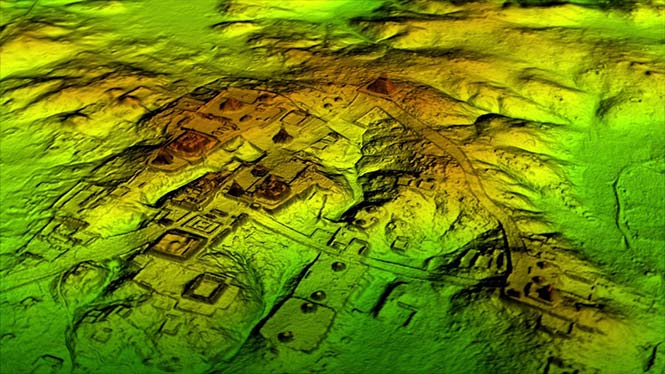
Lidar and UAV technology has revealed hundreds of previously unknown Mayan ruins in the Guatemalan rainforest.
The Optech Titan stripped away overlying vegetation to reveal extensive Mayan ruins in Guatemala’s rainforest. (Image: Teledyne Optech)
In what is considered biggest aerial lidar survey in the history of archaeology, a vast and complex civilization has been discovered.
The University of Houston’s National Center for Airborne Laser Mapping (NCALM) used Teledyne Optech’s Titan sensor to identify raised highways, and complex irrigation and terracing systems.
The jungle of Central America is one of the last great frontiers of archaeology, according to National Geographic, which covered the new finds in a recent documentary, Lost Treasures of The Maya Snake Kings.
After the collapse of the Mayan civilization, its cities and monuments were quickly covered by thick rainforest, hiding it from airborne observation and making it very difficult to survey on foot. Over decades of work, the ancient civilization has gradually been revealed. But now technology is set to change everything.
Lidar digitally removes the forest canopy to reveal ancient ruins below, showing that Maya cities such as Tikal were much larger than ground-based research had suggested. (Photo: National Geographic)
Flying high above the rainforest, the Titan’s lasers penetrated the canopy to collect almost a million data points per second from the forest floor, giving archaeologists a “bare earth” view of the structures underneath.
Having covered 2,100 square kilometers, the Titan’s data revealed massive amounts of ruins hidden below the forest, showing that their urban centers were significantly larger than archaeologists had previously thought.
“Lidar is revolutionising archaeology the way the Hubble Space Telescope revolutionised astronomy,” Francisco Estrada-Belli, a Tulane University archaeologist, told National Geographic. “We’ll need 100 years to go through all [the data] and really understand what we’re seeing.”
(Image: Teledyne Optech)
“We are incredibly proud and excited that our award winning Titan multispectral lidar sensor has contributed to this spectacular discovery,” said Michel Stanier, EVP and general manager of Teledyne Optech. “The Titan’s ability to strip away overlying vegetation and map wide areas very quickly and accurately makes it an important tool for archaeologists, and we expect to see many more discoveries coming from it and our other airborne laser terrain mappers.”
The Optech Titan multi-spectral lidar sensor incorporates three independent laser wavelengths into a single sensor design, with beams at 532, 1064 and 1550 nanometers (0.5/1.0/1.5 microns) and a ground sampling rate of 300 kHz per beam.
Image: Teledyne Optech
Because Titan uses both green and infrared channels, it is capable of simultaneous water-depth mapping and high-precision 900-kHz topography.
Titan can also be used for purposes such as vegetative and forestry applications, which require multiple wavelengths for improved classification accuracy and carbon credit counting initiatives.
Fortem Technologies‘ new TrueView technology is being used in the U.S. Unmanned Aircraft Systems Integration Pilot Program to detect potential air-to-air collisions and enable unmanned aircraft to safely navigate beyond visual line of sight (BVLOS) day or night and in clouds, fog, smog and other challenging weather conditions.
The TrueView R20.
Fortem Technologies is working with Lead Pilot Partners to further the pilot program. The program aims to accelerate safe integration of UAS into the national airspace.
Fortem’s TrueView R20 meets critical selection criteria by putting safety and security data at the forefront to enable expanded drone operations such as BVLOS and operations at night. Using AI algorithms, TrueView provides accurate real-time situational intelligence and awareness for safe, autonomous, unmanned aircraft operations.
Fortem TrueView R20 weighs 1.5 lbs. and is a breakthrough technology because of its small form factor, weight, power requirements and low cost.
Fortem’s radar technology has been hardened over the past six years through rigorous testing with the U.S. Department of Defense.The company provides advanced radar systems and associated software systems for manned and unmanned aircraft as well as its own modern air defense system known as the Fortem DroneHunter.
In January, Fortem Technologies announced the close of a $5.5 million funding round led by Signia Venture Partners and Data Collective.
“One of the biggest challenges for the UAS industry is the ability to detect other aircraft and stay well clear from potential collisions,” said Jared Essleman, director, Utah division of aeronautics. “Achieving safe autonomous flight beyond-visual-line-of sight is going to be the next big chapter for the aviation industry. The announcement of TrueView R20 technology is an exciting development for safe autonomous operations, allowing UAS to course correct as needed to mitigate risk.”
“We are proud of our progress and ability to innovate around one of the most daunting challenges in the drone industry; namely safe BVLOS and nighttime operations,” saidTimothy Bean, CEO of Fortem Technologies. “With TrueView, we have responded to feedback from our customers to bring this needed detect-and-avoid product to a worldwide market.”