NAL Technologies (Naltec), a provider of assured positioning, navigationand timing (APNT) solutions, has added to its Alternative Location and Timing Module (ALTM) family with ALTM-T. The ALTM-T module is engineered for applications and infrastructure demanding precise location, timing and synchronization redundancy with other APNT sources.
Critical network infrastructure — power grids, financial markets, transportation, data and centers — are heavily reliant on GNSS/GPS signals where precise timestamps, synchronization and transaction integrity, and operational continuity are key.
ALTM-T is an ultra-low size, weight and power (SWaP) receiver ptimized for precision timing at <50ns RMS. It also conforms to the M.2 3042 B-key standard form factor and uses less than 600MW consumption, making it suitable for SWaP-constrained systems.
“APNT technology complements GNSS/GPS, which is the invisible backbone of modern infrastructure,” said APNT Solutions Director, Rob Gillette, NAL Technologies. “Without additional timing sources such as APNT by Naltec, a failure of GNSS/GPS can trigger consequences that could cascade rapidly across utilities, transportation and financial markets. With ALTM-T, users will benefit from enhanced performance delivered from APNT by Naltec, to ensure resilient precision timing synchronization.”
The embeddable ALTM-T receiver leverages the Iridium PNT signal to provide a complementary APNT source that is approximately 1,000 times stronger than GNSS/GPS. The APNT signal can penetrate indoor environments as well as mitigate intentional and unintentional GNSS interference for ultimate reliability.
Naltec provider of Iridium PNT-enabled modules, with more than 13,000 receivers deployed since its first ALTM launch in 2019. ALTM-T is commercially available and now shipping.
Visual localization is widely used as a low-cost solution for autonomous driving, robotics, and mobile navigation. However, monocular systems remain vulnerable to illumination changes, weak texture, occlusion, motion blur and long-term drift.
Existing map-based methods can reduce that drift by aligning camera observations with a prebuilt global map, yet many still struggle with redundant computation, weak cross-modal matching between camera images and point clouds, and optimization errors in large-scale or repetitive scenes.
The challenge is especially important for lightweight platforms that cannot afford onboard lidar, inertial measurement unit (IMU) and heavy computing. Because of these problems, deeper research is needed on camera-only map-based localization that can stay accurate, efficient and stable in complex real-world environments.
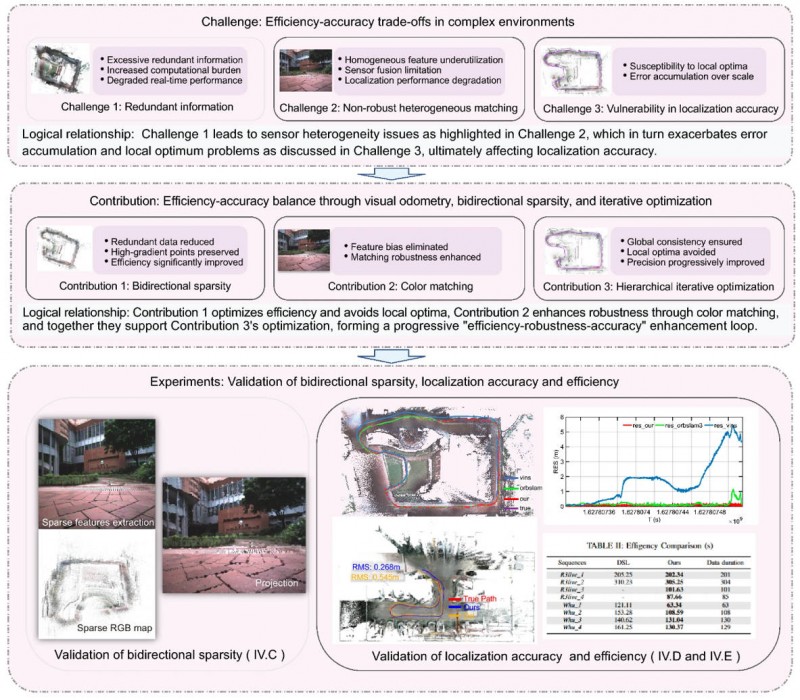
Overview of the proposed camera-only map-based localization framework. (Credit: Satellite Navigation)
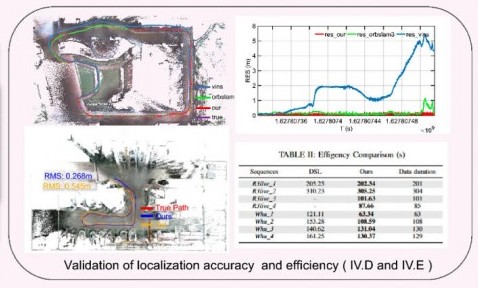
On April 20, researchers from Wuhan University and Chongqing University reported (DOI: 10.1186/s43020-026-00196-x) in Satellite Navigation a camera-only localization framework that uses prebuilt colored point cloud maps, a dual-sparsity matching strategy that retains high-gradient features in both the map and image observations, and hierarchical geometric–photometric optimization to improve both positioning accuracy and computational efficiency in GNSS-challenged environments.
The system is built around two connected stages. First, the researchers generate a sparse colored point-cloud map from a denser map produced by lidar–IMU–camera mapping, keeping only high-gradient points that preserve visually salient structures while removing weak or redundant information.
They apply a similar sparse selection process to online camera images, creating what the team calls “dual-sparsity matching” between map and observation. During localization, the method uses Lucas–Kanade optical flow to track sparse 2D image features and associates them with 3D map points, while hidden-point removal helps retain only the map points actually visible from the current viewpoint.
The pose is then refined through an iterated error-state Kalman filter in two stages: a geometric PnP-style correction for stable coarse alignment, followed by photometric refinement using image intensity consistency for sub-pixel accuracy.
Tests on the R3live and WHU-Motion datasets showed major gains over existing methods. Compared with direct sparse localization (DSL), the new approach cut absolute trajectory error (ATE) by 52% to 95% across challenging sequences, including a drop from 1.883 m to 0.152 m on R3live_5. It also improved accuracy by up to 76.6% over I2D-Loc++, reduced total processing time by as much as 47.7%, and remained robust in degenerate scenes where geometry-only localization deteriorated to 9.23 m while the proposed tracker held an ATE of 0.076 m.
Ablation results further showed that colored maps, bidirectional sparsity, and hierarchical optimization each played a distinct role in achieving the final balance of speed, robustness, and precision.
The authors said the main advance is not simply adding color to a map, but treating the global colored point cloud map as a continuous observation within the visual odometry framework. They said the framework shows that a monocular camera can localize far more robustly when paired with a prebuilt colored point cloud map and a coarse-to-fine optimization design that avoids poor local solutions.
In their view, the study offers a practical middle ground between fully sensor-rich systems and fragile vision-only pipelines, preserving much of the accuracy benefit of map-based localization without demanding equally heavy hardware on the client platform.
The work could have immediate value for indoor logistics robots, underground inspection platforms, warehouse vehicles, parking-garage navigation systems, and other low-cost autonomous agents operating where GNSS is weak or unavailable. Because the mapping can be completed offline and reused, the online platform needs only a monocular camera, which lowers sensing requirements while retaining strong global constraints.
That makes the method especially attractive for scalable deployments in structured but challenging spaces such as tunnels, campuses, hospitals, and industrial facilities. More broadly, the study suggests that future navigation systems may become both lighter and more dependable by making better use of the information already shared between maps and images, rather than relying only on ever-larger sensor stacks.
Hexagon has successfully completed acquisition of Inertial Sense, strengthening its assured positioning, navigation, and timing (PNT) portfolio with tactical-grade GNSS+INS technology.
The acquisition reinforces Hexagon’s long-term commitment to innovation in high-performance navigation technologies. Inertial Sense strengthens Hexagon’s positioning portfolio and further enhances its assured PNT capabilities.
Headquartered in Provo, Utah, Inertial Sense will continue supplying inertial navigation solutions and will be integrated into Hexagon’s Aerospace & Defence Division.
“Inertial Sense brings exceptional GNSS+INS innovation that advances our assured PNT roadmap and expands resilient positioning capabilities in GPS-challenged environments,” said Stig Pedersen, president, Aerospace & Defence Division, Hexagon. “Their compact, cost-effective solutions meaningfully enhance our ability to serve aerospace and defence applications.”
Inertial Sense is a provider of high-performance navigation solutions, with more than 30,000 inertial systems deployed worldwide across defense and commercial applications.
Inertial Sense was founded in 2013 by Walt Johnson, who started Inertial Sense 10 years ago to make precision navigation lightweight and affordable so that it could be deployed anywhere and accessible to any business. This includes the rapidly emerging industries of drones, mobile robotics, aerospace and defense, autonomous vehicles, and automated manufacturing, all of which would require scalable and affordable navigation solutions.
Lockheed Martin has successfully completed the core mate phase of GPS IIIF Space Vehicle 11 ( SV11), a critical production milestone that marks the satellite’s formal “birth.”
Continued manufacturing and deployment of these next-generation GPS spacecraft is essential to maintaining reliable global coverage, with the GPS IIIF block introducing a suite of new capabilities that further strengthens the constellation’s resilience. GPS IIIF satellites are equipped with Regional Military Protection, improving anti-jamming capability by more than sixty times, giving warfighters a decisive edge against sophisticated electronic warfare threats.
GPS IIIF SV11 is the third GPS IIIF satellite to complete the core mate phase, after SV13 and SV14 completed core mate last year. GPS IIIF SV11 will be the first IIIF satellite to launch.
“Core mate of SV11 showcases the production momentum behind the next-generation GPS IIIF satellites as we continue to invest in advanced manufacturing,” said Christina Mancinelli, vice president of Global Communications & Navigation at Lockheed Martin. “With three GPS IIIF satellites past core mate, we’ve taken pivotal steps toward accelerating production, ensuring we’re delivering critical next-generation resiliency capabilities to the GPS constellation at the pace warfighters need to protect our nation.”
The SV11 satellite is also M-code-enabled, providing an encrypted, anti-spoofing signal that strengthens positioning, navigation and timing (PNT) capabilities for military users globally. Additionally, SV11 is equipped with a new search-and-rescue payload that will allow first responders to navigate to emergencies in remote locations.
With an eye on strengthening GPS, all GPS IIIF satellites starting with SV13 will be built on the evolved LM2100 Combat Bus, which adds additional cyber-hardening and improved spacecraft power, propulsion and electronics. These vehicles are equipped with extra size, weight and power, providing flexibility to integrate additional payloads quickly onto future space vehicles.
GPS IIIF satellites are manufactured at Lockheed Martin’s Denver, Colorado, facility, where the company is accelerating production through the use of augmented reality and digital twins. Lockheed Martin is currently under contract through GPS IIIF SV22 and recently completed all launches of GPS III space vehicles.
ZED-X20P-01B adds Galileo High Accuracy Service (HAS), Moving Base, and stronger resilience against jamming and spoofing, enabling scalable high-precision positioning for global OEM deployments.
U-blox has launched and availability of its new all-band GNSS module variant, the ZED-X20P-01B.
Building on the proven capabilities of the ZED-X20P platform, the new module expands access to high-precision positioning by bringing global precise point positioning (PPP) to a broader range of use cases. With support for Galileo High Accuracy Service (HAS) the ZED-X20P-01B enables OEMs to launch products with reliable, decimeter-level positioning across markets worldwide, without tying product availability to local correction infrastructure.
The ZED-X20P-01B extends u-blox expertise in GNSS by addressing a growing market need: making high-precision positioning more practical to deploy at global scale. By integrating enhanced PPP capabilities, including Galileo HAS functionality, and improving resilience against jamming and spoofing (verified at Jammertest 2025), the module gives developers a dependable positioning that can serve both as a primary global solution and as a fallback where local RTK correction services are limited, unavailable, or impractical. This flexible approach opens new opportunities for global OEMs to design and ship products with reliable decimeter-level accuracy out of the box across regions, applications, and operating conditions.
The ZED-X20P-01B. (Credit: U-blox)
Built for global OEM deployment
The ZED-X20P-01B is especially valuable for products shipped across regions with inconsistent access to RTK networks, SBAS coverage, or reliable communications. This gives manufacturers a more flexible path to delivering high-precision positioning worldwide, while also opening new opportunities in remote, rural, and infrastructure-limited environments.
Representative applications include:
UAVs without reliance on continuous connectivity for mapping and navigation:
Marine applications such as dredging, near-shore navigation, and seabed mapping without complex RTK setup
Precision agriculture, construction and mining in remote locations, including geofencing and equipment tracking
Environmental and utility mapping in infrastructure-limited regions
Robotics and autonomous platforms requiring reliable relative positioning through Moving Base functionality.
Enhanced performance and robustness
The ZED-X20P-01B builds on the core strengths of the ZED-X20P while introducing key enhancements:
Native support for Galileo HAS for globally accessible PPP corrections
Moving Base functionality for applications requiring precise relative positioning
Improved jamming and spoofing detection and mitigation for mission-critical applications
Continued compatibility with u-blox PointPerfect services for scalable correction options.
Together, these enhancements help OEMs deliver reliable high-precision positioning across wider geographies and more demanding RF environments, while keeping system design streamlined. Most importantly, they make decimeter-level accuracy out of the box a practical option for products deployed globally.
Ease of integration and scalability
Maintaining the established ZED form factor, the ZED-X20P-01B offers a seamless upgrade path for existing customers. With its compact design it reduces the need for additional hardware or complex host-side computation.
This helps developers accelerate time to market and scale from pilot projects to global commercial rollouts without redesigning their systems for each target region. For OEMs building products for international shipment, the ZED-X20P-01B offers a practical way to standardize around one high-precision platform while expanding coverage, improving resilience, and simplifying deployment.
“ZED-X20P-01B reflects our commitment to making high-precision positioning more scalable, resilient, and easier to deploy globally,” said Andreas Thiel, CEO of u-blox, said. “With Galileo HAS support, Moving Base, stronger protection against jamming and spoofing, and a seamless path for existing ZED-X20P customers, we are enabling OEMs to bring reliable decimeter-level positioning to more products, in more markets, with fewer deployment constraints.”
Experience ZED-X20P-01B live
U-blox will showcase the ZED-X20P-01B at XPONENTIAL 2026 in Detroit, where visitors can experience the module live at booth 23023.
Availability
Samples and evaluation kits for the ZED-X20P-01B will be available in June.
The National Physical Laboratory (NPL) and Vodafone have successfully completed a set of trials using the NPLTime service as an alternative to GPS-timing signals.
Requirements for precise time delivery have driven the telecoms sector toward the increased use of GNSS for accurate timing. There are various alternatives to GNSS, each with their own capabilities, but GNSS has become the default mechanism for most sectors to access timing signals.
As the telecommunications industry rolls out 5G networks and prepares for 6G, it’s important there is a range of diversified timing signal sources that are resilient and secure. All major telecommunications providers in the UK and Europe share this requirement.
In the UK, VodafoneThree is the first mobile network operator to test the performance of a terrestrial NMI-provided time source as an alternative to GNSS-based time in their network timing infrastructure.
Vodafone is accelerating 5G coverage and improving data service performance across Europe and emerging markets by deploying 5G standalone networks, launching enterprise-grade slicing services, and 5G Advanced programs.
Vodafone is positioning itself as a future-ready connectivity platform for both consumers and industries, making it a must to protect the 5G network and future networks. Vodafone is actively reducing reliance on GNSS for time synchronisation for the VodafoneThree network in the UK and other Vodafone markets around Europe in collaboration with European Metrology Institutes.
The partnership will support the reliability and resilience of VodafoneThree’s £11bn network investment program to create the UK’s best network, reaching 99% 5G standalone population coverage by 2030, and 99.96% by 2034.
For the past 30 years, NPL has been operating the UK’s national time scale, UTC (NPL), and for the past eight years it has been disseminating NPLTime, an end-to-end fibre-based timing service that has been supporting the finance sector with regulatory compliance.
The partnership between NPL and Vodafone will develop a telecom version of the NPLTime service that meets stringent ITU standards for signal accuracy, stability, resilience and traceability. More specifically, the new service will deliver a terrestrial reference signal that is traceable to UTC (NPL) and can maintain accuracy within 40ns.
At the end of the trial, the new service will meet the accuracy requirements of most sectors in the UK and offer the potential for telecommunications operators to extend the reach of a UK sovereign time source to other industries. Vodafone intends to replicate the same telecom timing infrastructure across all Vodafone markets.
The partnership builds on the UK government’s efforts to increase resilience for position, navigation and time (PNT) for the UK’s digital infrastructure as well as on NPL’s role in delivering the National Timing Centre (NTC) program.
“Our work with the National Physical Laboratory marks a significant step in reducing over reliance on GPS-based timing and strengthening the foundations of our future-ready 5G Standalone network,” said Andrea Donà, chief network officer, VodafoneThree. “By testing a terrestrial timing solution we’re helping to ensure that our £11 billion investment delivers a network that is not only faster and more reliable, but also more secure and resilient for our customers.”
Patented software visual-inertial cooperative navigation technology has potential to target defense, counter-drone (C-UAS), electronic warfare, and autonomous unmanned aircraft systems markets
NorthStrive Defense Tech LLC has secured a license option in connection with a proprietary U.S. patented autonomous navigation technology through an exclusive option agreement with a corporation.
The technology is designed to enable autonomous positioning and navigation for unmanned aircraft systems and drones operating in GPS-jammed, GPS-spoofed and GPS-denied environments, addressing a core capability gap identified by the U.S. Department of Defense (DoD) and allied defense programs worldwide.
NorthStrive Defense Tech LLC is a wholly-owned subsidiary of PMGC Holdings Inc.
The option agreement provides NorthStrive Defense Tech with an exclusive option, within the aerospace and defense technologies field, to obtain an exclusive license as to certain patent rights for U.S. Patent No. 12,277,716 B2, covering a cooperative navigation system for unmanned aircraft systems, also known as drones, operating in GPS-denied and GPS-degraded environments.
The option is also for a non-exclusive license in the field as to certain know-how connected to these patent rights, as further set in the option agreement. On NorthStrive Defense Tech’s exercise of this option, the parties will enter into negotiations for a definitive license agreement.
The technology has the potential to enable drones to navigate accurately without GPS by using onboard cameras and inertial sensors to estimate position relative to the local environment. The approach applies visual-inertial odometry (VIO) and sensor-fusion techniques, including an Extended Kalman Filter (EKF) for real-time state estimation and cooperative multi-vehicle data sharing, which together represent foundational building blocks of next-generation autonomous systems.
When multiple drones operate, they share positional data in real time to collectively improve each vehicle’s accuracy, with performance formally evaluated under real-world GPS-denied conditions.
GPS-denied navigation has emerged as one of the most urgent challenges in modern drone operations. Conflicts in recent years have demonstrated that GPS signals cannot be relied upon in contested environments, where jamming and spoofing are routinely deployed to disable unmanned systems.
Vulnerabilities in GNSS signals have made anti-jamming and anti-spoofing capabilities a top priority within U.S. defense modernization programs, the Pentagon, the DoD and allied NATO forces. That operational reality has driven substantial investment across the defense sector, with the GPS-denied drone navigation market projected to grow at a CAGR of 31.7% through 2030, according to Technavio.
Key potential capabilities include:
Vision and inertial-based navigation requiring no GPS signal (visual-inertial odometry / VIO with Extended Kalman Filter (EKF)-based state estimation)
Cooperative swarm localization through inter-vehicle range sharing, a foundational capability for drone swarm and counter-drone (C-UAS) operations
Scalable architecture supporting operations from individual drones to full swarms, with an architecture positioned for integration with AI-enabled autonomous systems
Technology formally evaluated for accuracy and performance under real-world GPS-denied conditions.
The system’s modular design keeps flight-critical estimation onboard each drone while requiring minimal data exchange between vehicles, making it practical for contested environments where communications bandwidth is limited or actively degraded.
Turkish UAV maker Baykar demonstrated its next-generation Kamikaze UAV K2 and Sivrisinek (Mosquito) loitering munition, showcasing AI-supported swarm autonomy, GNSS-independent navigation, automatic target detection, and strike capabilities during a demonstration held at the Keşan Flight Training and Test Center.
The K2 Kamikaze UAV and the Sivrisinek loitering munition will make their public debut at SAHA 2026, which takes place in Istanbul May 5-9.
The April 17 demonstration opened with the sequential takeoffs of five K2 Kamikaze UAVs within five minutes. Once airborne, the platforms conducted patrol flights in “right echelon,” “line,” “V,” and “Turan” formations.
Ten Sivrisinek loitering munitions — a new platform developed by Baykar — then joined the operation, forming a swarm beneath the K2 Kamikaze UAVs. The Bayraktar TB2, TB3, and AKINCI UCAVs accompanied the swarm flight, recording the operation from the air.
Credit: Baykar
AI-supported visual navigation Among the key technical highlights of the demonstration were the solutions developed to counter electronic warfare environments. Using AI-supported visual navigation software, the platforms demonstrated the capability to perform positioning and navigation independently of GNSS.
Having successfully showcased autonomous navigation in a GNSS-denied environment, the K2 and Sivrisinek Kamikaze UAVs also demonstrated AI-supported automatic target detection and automatic strike capabilities.
As part of the demonstration, a fleet of Sivrisinek loitering munitions executed a dive on the designated coordinates. A K2 Kamikaze UAV then broke off from the swarm and performed a high-speed dive on the designated coordinates, conducting a pass. In the final phase of the demonstration, a swarm group composed of 18 unmanned aerial vehicles across different classes — 5 K2s, 10 Sivrisinek, 1 Bayraktar TB2, 1 TB3, and 1 AKINCI — came together in a “V” formation to salute the delegation observing the flight.
Developed by Baykar, the next-generation Sivrisinek loitering munition raises operational depth to a range exceeding 1,000 kilometers. Capable of uninterrupted communication within the swarm through AI support, Sivrisinek platforms can instantly share detected targets with one another.
Performing its missions through AI-based visual positioning even in the most challenging environments — including areas where GNSS signals are unavailable or subject to intensive jamming — Sivrisinek stands out in strategic missions to be conducted on the battlefield thanks to its high autonomy capability.
Using a wide range of sensors and an ultra-broadband network created by team members, emergency services can orientate themselves and coordinate effectively even without GNSS, light or external communication.
In the NIKE MATE project, the focus is on navigating tunnels in difficult circumstances — collapse of infrastructure, GNSS outages, presence of smoke and debris, all of which make orientation challenging.
NIKE MATE is funded by the Austrian Research Promotion Agency (FFG), a research team consisting of Graz University of Technology (TU Graz), the University of Leoben, the Federal Ministry of Defence, OHB Austria and the Laabmayr Engineering Office.
The NIKE MATE team has developed a system for tough tunnel missions that combines sensor data from robots and rescue teams with a self-built UWB (ultra-wideband) network. The result is a dynamic map of the environment in which the team can locate and coordinate itself.
A human/robot team
The central innovation of the project is “teaming”. A robot with highly developed sensor technology first explores the surroundings and creates the dynamic map. The position information obtained is exchanged via a UWB transmitter with emergency personnel following behind or working in parallel, who are themselves equipped with UWB tags and who place UWB anchors along their route.
In addition to stable data transmission, the anchors also enable distance measurements between all participants even without a direct line of sight. This creates a network of distance measurements in which the positions of robots and people can be determined with an accuracy of closer than one meter.
“This precise localization is a decisive safety factor, for example if there is an open lift door or a precipice in front of a person,” said project manager Philipp Berglez, Institute of Geodesy, TU Graz.
Sensor technology plays an important role in localization. The robot uses a laser scanner, a camera, and wheel sensors to create a map of its surroundings. This means emergency services do not have to rely on plans that may be outdated or no longer correct due to damage.
The rescue workers who follow have inertial sensors (accelerometers and angular rate sensors) on their shoes. Using AI-based analysis, the system recognizes various movement patterns such as walking, crawling on all fours, or belly crawling.
Drone data to be included
To ensure that the position calculations are not only accurate but also reliable, the project team uses factor graph optimization methods. These originate from robotics and make it possible to take past measurements into account again, and thus better determine the current position. If robots or people pass the same place at different times, their data can be linked and the map continuously improved.
“The prototype we developed proved its suitability for use during our tests at Zentrum am Berg at the University of Leoben,” Berglez said. “For real-life use, we now need to make the individual components even more robust so that they can withstand real-life conditions and function reliably.
“We would also like to expand the system to include mini-drones in order to obtain additional data from a slightly higher position in the event of an emergency, which could significantly help emergency services in their work.”
The 23rd International Flight Inspection Symposium (IFIS) will gather experts in San Salvador May 4-8. There, Rohde & Schwarz will demonstrate its test and measurement solutions for ground-based navigation aids. The exhibits address the rising traffic volumes and stricter safety requirements.
Rohde & Schwarz will take part in the conference’s technical sessions with a presentation on “Challenges for UAV Operations in RF Dense Aerodrome Environments.”
The aviation sector today faces increasing air traffic density, rapid technological advancements and heightened security concerns, the company explained. Operators need test equipment that delivers laboratory level precision while tolerating the harsh environment of an airport runway or a remote navigation site.
Among the exhibits at the Rohde & Schwarz booth is the R&S EVSD1000 VHF/UHF Nav/Drone Analyzer, designed to conduct GBAS, ILS and VOR measurements in line with ICAO Doc 8071 and ICAO Annex 10. The receiver delivers laboratory precision, supports an air to ground Wi‑Fi datalink and gapless measurements with improved location accuracy during flight inspections. Customers benefit from a device that can be mounted on a drone, reducing the need for manned flights and lowering operational expenses.
Rohde & Schwarz gives airlines, airport operators and navigation service providers a reliable way to certify and maintain ground‑based aids under today’s demanding conditions. By combining high measurement accuracy, easy operation and durability, Rohde & Schwarz aims to help the industry keep pace with growth.
As Brazilian farmers face increasing pressure to improve efficiency while managing rising input costs, Topcon Agriculture has announced a new set of innovations designed to expand access to precision technology across Latin America.
At Agrishow 2026, taking place April 27–May 1 in Brazil, Topcon will showcase solutions for row crop, coffee, citrus and sugarcane growers, including an expansion of its Value Line portfolio into vineyard and orchard spraying applications, as well as the introduction of a new modular GNSS receiver for precision agriculture.
XR-1P GNSS receiver
Modular GNSS receiver. Topcon is introducing the XR-1P GNSS receiver, designed to deliver reliable positioning and manual guidance in a cost-effective, durable unit. Engineered with modular architecture, the XR-1P can be used as a standalone solution or integrated into broader Topcon systems, offering flexibility for a wide range of farming operations.
The receiver is designed to bridge the gap between entry-level positioning solutions and high-performance precision agriculture systems, making advanced GNSS technology more accessible without compromising reliability.
CM-20 V spray controller
Expanding precision spraying for specialty crops. The CM-20 V Spray Controller, part of Topcon’s vineyard and orchard spraying control portfolio, is now available for use with the Value Line Steering solution. Designed for front-wheel-drive, mid-range tractors, the system offers an economical and scalable approach to precision spraying for specialty crops such as coffee and citrus.
The universal ISOBUS electronic control unit (ECU) integrates easily with existing farm equipment, regardless of brand, while on-the-go sensor-based control adjusts application rates based on crop density. This helps reduce input waste, minimize over- and under-application, and improve overall crop health and operational efficiency.
Sugarcane solution preview. An advanced look at a pre-commercial Sugarcane Yield Monitoring Solution will be showcased at the event. In development with the specific needs of Brazilian agriculture in mind, the solution will provide accurate, real-time yield visibility designed to maximize harvester efficiency, optimize logistics and support precision agronomy. By enabling more precise decision-making, the solution will help reduce input usage while increasing productivity in one of the country’s most strategic crops.
Boom height controller
Brazil is a strategic market for Topcon Agriculture, as it is one of the world’s leading food producers. Topcon supports the region not only through innovations tailored to local agricultural needs but also through a strong and expanding network of distributors that provide access to technology, training, and ongoing support. Authorized dealers, including Agrosure, Alagro, Coopercitrus and WiseAgri in Brazil, as well as Nievas in Argentina and Gestecner in Paraguay, will be at the Topcon stand during Agrishow.
Microchip Technology has released its MD-990-0011-B family of plug-in timing modules, delivering turnkey, high-precision synchronization for data center servers and 5G virtualized radio access networks (vRAN).
Developed in collaboration with Intel, the MD-990-0011-B timing module is designed for seamless compatibility with Intel Xeon 6 SoC-powered server platforms, supporting both OEMs and ODMs in building future-ready systems. By leveraging Intel’s foundational vRAN architecture, the module enables robust, low-latency time synchronization, which is essential for distributed AI workloads and real-time applications.
Engineered for the reliability and scalability required by cloud infrastructure, virtualization and high-availability deployments, the MD-990-0011-B supports automatic source selection and locking across GNSS, synchronous Ethernet (SyncE) and precision time protocol (PTP). This flexibility supports continuous, accurate timing even as network demands evolve.
The MD-990-0011-B timing modules are available in two variants. MD-990-0011-BC01 offers eight hours of holdover performance; MD-990-0011-BA01 offers four hours of holdover performance. These timing modules consolidate several of Microchip’s advanced technologies into a single, highly integrated solution. Key components include:
Synchronous Ethernet (SyncE) synthesizer (ZL80132B). Two independent digital phase-locked loop (DPLL) channels for flexible and resilient synchronization
Oven controlled crystal oscillators (OCXOs, OX-22x). Provide up to eight hours of holdover, ensuring stable timing during GNSS outages or network disruptions
MCP9808 temperature sensor. Supports enhanced, environmental monitor 24LC024 EEPROM implementing board configuration and VC-820for low jitter performance
By unifying these critical timing components into a single plug-in module, the MD-990-0011-B streamlines server architecture, reduces design complexity and simplifies the supply chain. Its modular design enables rapid installation and simplified maintenance, minimizing downtime and facilitating effortless upgrades, key advantages for dynamic data center and 5G network environments.