The U.S. Department of Transportation’s most recent document preparing for the future of self-driving cars almost entirely ignores positioning, navigation and timing (PNT) needs, according to the Resilient Navigation and Timing (RNT) Foundation. And when it does address GPS, it gets things wrong. A Dec. 3 deadline looms for interested parties to file their comments with DOT.
The comment period is open until December 3. Interested parties can make their own comments and read those already submitted at the website for Docket DOT-OST-2018-0149.
The cited comment from the RNT Foundation states that, while most self-driving cars are being designed to navigate without external inputs, GPS/GNSS will still be required to initialize location information for vehicle cold startups. Also, most vehicles will reference GPS/GNSS when communicating their positions to other vehicles and traffic control systems.
Much of the benefit of automated vehicles will come from their participation in Intelligent Transportations Systems. This means wireless networks. The RNT Foundation also urges the department to consider these networks’ critical dependence on GPS timing synchronization in their plans going forward.
(Image: Pavel Vinnik/Shutterstock.com)
The Secretary of Transportation has had a mandate to provide a backup capability for GPS since 2004 that has not been acted upon. The RNT Foundation comments observe that doing so could greatly mitigate all of the concerns mentioned.
Dana Goward is president of the Resilient Navigation and Timing Foundation, based in Washington D.C.
Dull, dirty and dangerous — those used to be the jobs relegated to autonomous systems. But a decade-plus of improvement in sensor and computing technology has brought autonomy into the mainstream as a defining technology of the future.
At September’s ION GNSS+ conference, I attended a panel titled “Autonomous Cyber-Physical Systems — The Way Ahead.” I came away astounded by how much is changing, and how fast, because of autonomous CPS.
The panel was chaired by John Raquet of the Air Force Institute of Technology and Zak Kassas of the University of California Riverside. It featured presentations covering topics such as the Columbus Smart City Challenge (Dorota Grejner-Brzezinska, The Ohio State University), benefits of precision agriculture (Steve Rounds, John Deere), robotic teammates on the battlefield (Brett Piekarski, U.S. Army), and UAV design and certification (Demoz Gebre-Egziabher, University of Minnesota).
Autonomous cyber-physical systems (CPS) include unmanned aerial vehicles, self-driving cars and unmanned underwater vehicles. The panel addressed the state of autonomous CPS as well as challenges that need to be addressed as we integrate these systems into our environment.
Rather than discuss a specific application, Michael Veth, CEO of Veth Research Associates, tackled a difficult question: Just how much autonomy do we give machines?
“Rigorous risk assessment is the most critical component of machine-controlled autonomous systems,” Veth said. He said the scope of the machine’s autonomous decisions should be limited to the minimum necessary — in other words, avoid the scenario depicted in the movie WarGames.
Another rule: “Don’t put beta software on the street,” he said, recalling the Tesla autosteer system that resulted in a death. Instead, follow DARPA’s example, with its extensive sandbox testing.
Summing up his presentation, Veth provided five guidelines for developing autonomous machines:
Perform rigorous risk assessments;
limit range of action to the minimum required;
use generative models whenever possible;
train and evaluate using maximum available data; and
Completion of the transaction was subject to regulatory approvals, including a filing to the Committee on Foreign Investment in the United States (CFIUS), which have now been obtained.
AutonomouStuff will be a fully owned subsidiary of Hexagon and operate within Hexagon’s Positioning Intelligence division.
“Combined with Hexagon PI’s leadership in high accuracy, functionally-safe and high-integrity positioning technology, the addition of AutonomouStuff and their offerings is helping our customers to accelerate the development of more comprehensive Autonomous X solutions,” said Michael Ritter, president and CEO of Hexagon PI. “Our expanded capabilities will allow Hexagon PI to meet the industry’s ever growing demand for more robust autonomy solutions.”
Hexagon PI has been an important technology provider to AutonomouStuff for several years, and the two organizations have worked closely together to serve common customers and collaborate on important industry events. As the division grows, AutonomouStuff will continue to function as an independent brand within Hexagon PI.
Founded in 2010, U.S.-based AutonomouStuff is pioneering solutions and platforms for autonomous vehicle development, robotics and data intelligence innovation. Its platforms, which use an expansive portfolio of technologies, are deployed in pilot programs worldwide — representing thousands of customers in the automotive and technology sectors across the globe, AutonomouStuff said.
“The combined entities now provide the fuel and support for exponential growth while affording us the ability to make continued advances in the mobility space,” said Bobby Hambrick, founder and CEO, AutonomouStuff. “I’m very excited for our shared future.”
In 2017, AutonomouStuff generated sales of 45 MUSD, with good profitability, Hexagon said. The AutonomouStuff transaction purchase price will not be publicly disclosed because it is considered insignificant relative to Hexagon’s market capitalization.
The income statement during the third quarter of 2018 will be impacted by -25 MEUR, related to impairment of overlapping technologies, transaction costs and a reduction in workforce. During the third quarter 2018 Hexagon also divested its shares in Bimobject which resulted in a capital gain of 22 MEUR.
Overall, the net impact of one-off items on the income statement in the third quarter 2018 will be approximately -3 MEUR, Hexagon said.
Founded in 2010, U.S.-based AutonomouStuff is developing turnkey platforms for autonomous vehicle development, robotics and data intelligence innovation. Its turnkey platforms are deployed in pilot programs worldwide representing more than 2,500 customers in the automotive and technology sectors across Silicon Valley, America, Europe and Asia.
“The acquisition of AutonomouStuff accelerates Hexagon’s ability to move our customers beyond the data impasse of IoT [internet of things],” said Ola Rollén, Hexagon President and CEO. “We’re particularly interested in technologies that are the most disruptive — those capable of leveraging the vast potential of data being generated by connected things, integrating AI [artificial intelligence], edge-cloud orchestration, mobility and data visualization into autonomous connected ecosystems. When combined with our positioning intelligence, mapping and sensing technology leadership, this acquisition creates a nexus of domain expertise that will lead the autonomous mobility industry for years to come.”
AutonomouStuff began when CEO Bobby Hambrick realized that robotics company representatives were having difficulty gaining access to the technology needed to solve their applications, according to the company. He envisioned a place where they could find the products needed to get their projects up and running. It is headquartered in Morton, Illinois, with offices in San Francisco, Detroit, Germany and China.
AutonomouStuff has been closely involved in Project Apollo, an autonomous driving ecosystem helmed by Baidu, the so-called “Google of China.”
Project Apollo seeks to provide an open, comprehensive and reliable software platform for Baidu’s partners in the automotive and autonomous driving industries. Partners can use the Apollo open software platform together with the reference hardware platform to accelerate development of their customized autonomous vehicle solutions.
AutonomouStuff provides the Apollo Kit to project partners: the hardware, software and services required to begin developing their own autonomous vehicle. NovAtel SPAN GNSS/INS products provide position, orientation and time as a critical component of this kit. A detailed description of the NovAtel (another Hexagon company in the Positioning Intelligence Group) and AutonomouStuff partnership is given in the August 2017 cover story of GPS World, “Autonomy assembled: Driverless kits to hit the road in 2020.”
At a Baidu conference in Beijing, April 2017, AutonomouStuff kitted out two standard Lincoln MKZ sedans for demonstration drives, with one technician completing each vehicle in about three hours — a task that would normally take a team of workers up to six weeks. The two Lincolns then drove simultaneously, driverless, around a test track.
The technology has been developed to be transferrable to other vehicles. Each car is modified by adding lasers, camera, radar sensors, GPS and inertial measurement unit (IMU), a drive-by-wire computer interface and computer engine.
As of August 2017, the kit incorporated a choice, depending on user needs, of a selection of NovAtel GNSS receivers, including the ProPak6 GNSS receiver and the SPAN-IGM-A1 GNSS+IMU combined system, IMUs such as the IMU-ISA-100C incorporating Northrop-Grumman Litef GMBH’s inertial measurement technology, and antennas such as the GNSS-703-GGG-HV high vibration triple-frequency GPS, GLONASS, BeiDou and Galileo antenna. A 64-beam Velodyne lidar sensor and 16-beam HDL-16E provide laser data. Some units may have changed since then.
Terry Lamprecht, director of products at AutonomouStuff, gave a presentation on verifying proper installation, and creating a baseline data set to benchmark against data collected on autonomous vehicles in real-time, as part of a November 2017 GPS World webinar, “High Accuracy for Autonomous Driving.” Download the free webinar here.
Completion of the transaction is subject to regulatory approvals, including a voluntary filing to the Committee on Foreign Investment in the United States, and other customary conditions that are expected to be satisfied within the next 90 days.
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
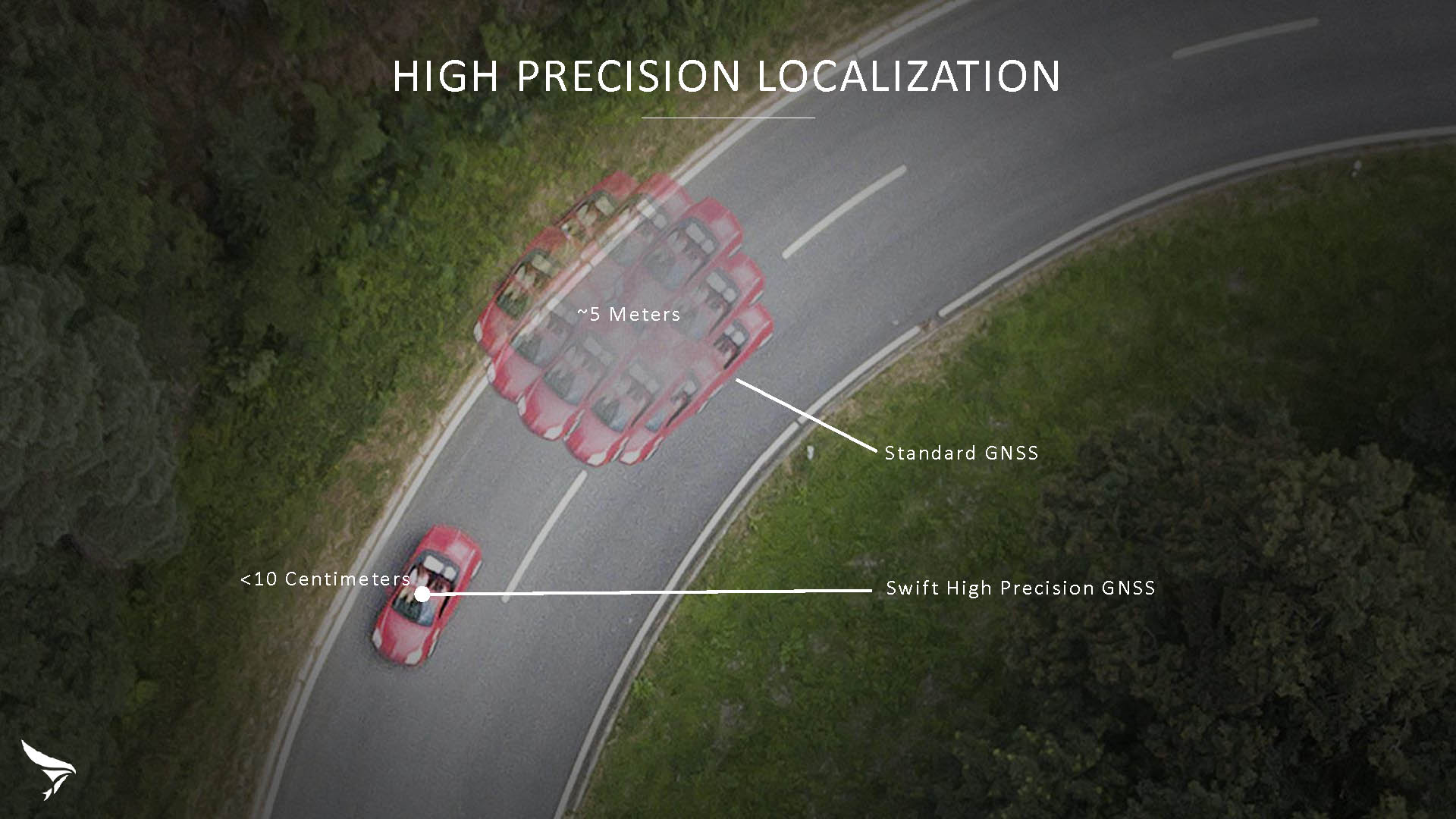
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
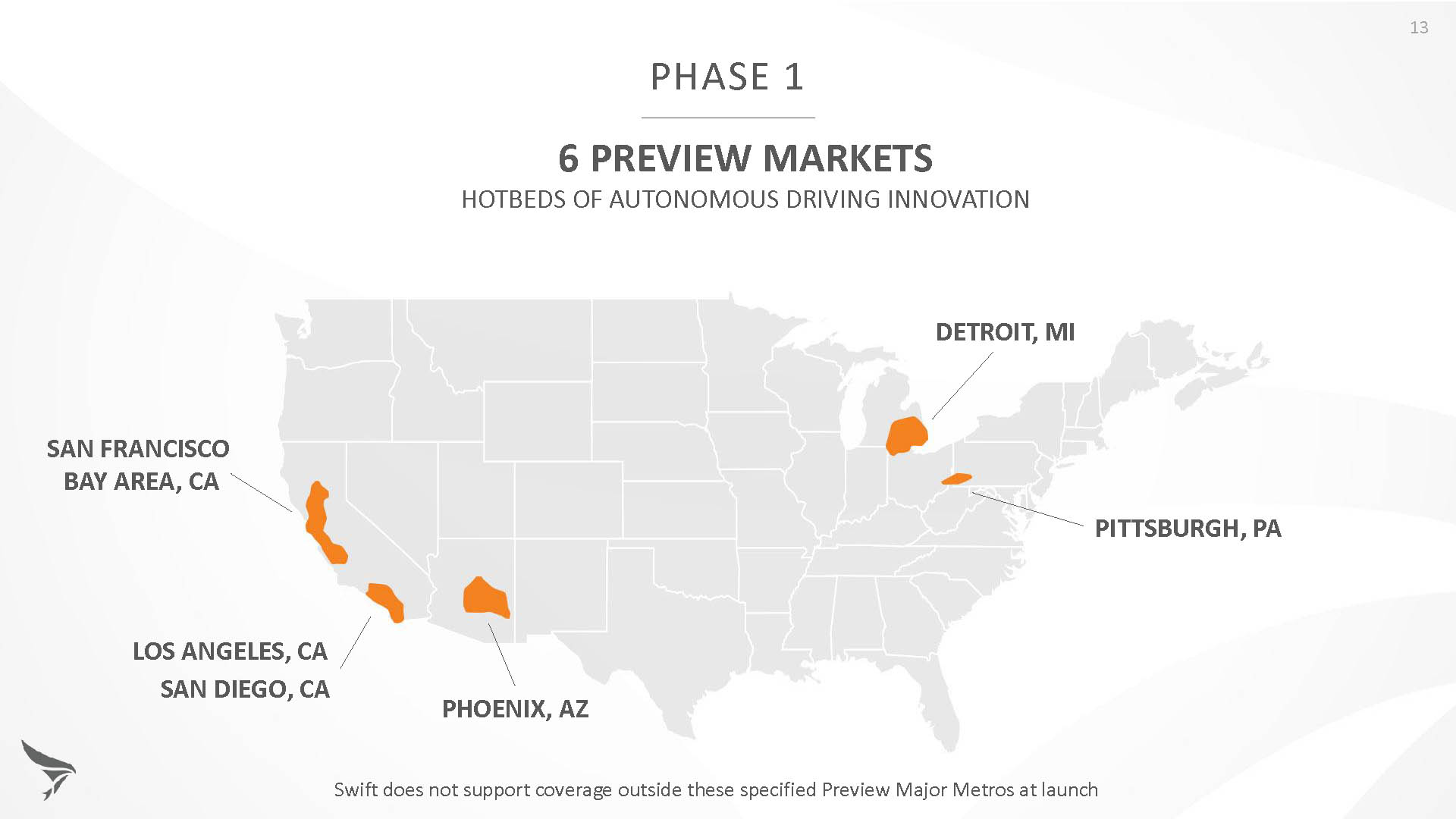
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
Topcon and Bentley have joined efforts to provide opportunities designed to allow construction industry professionals to learn best practices in constructioneering, a process of managing and integrating survey, engineering and construction data, to streamline construction workflows and improve project delivery.
“The courses are designed in a dialogue format to allow Topcon and Bentley personnel to interact directly with attendees to cater the experience for their specific questions and demands,” said Ron Oberlander, senior director of Topcon Professional Services. “The future of construction automation continues to move forward with constructioneering digital workflows, which make the work of surveyors, engineers, and construction professionals automated, continuous, and continuously more valuable, throughout project lifecycles and beyond completion.”
“Topcon and Bentley’s federated constructioneering technologies enable firms to gain unprecedented digital visibility and insights into their project outcomes, as compared to traditional construction workflows. Attendees of our Constructioneering Academy will learn how their organizations can improve project delivery by leveraging constructioneering technology, methods, and best practices to execute their projects more efficiently, monitor construction performance and progress, and reduce project costs,” said Vinayak Trivedi, Bentley Institute vice president.
The Constructioneering Academy will continue with additional sessions throughout learning centers located worldwide designed to reach industry professionals with hands-on training in real-world scenarios and workflows.
Aeronyde has received $4.7 million in seed financing to develop its end-to-end infrastructure for self-flying vehicles.
Aeronyde is an aerial systems company aimed at enabling safe autonomous urban flight. The company is working to integrate artificial intelligence and augmented reality into a full-service system for the safe and secure operation of commercial drones.
The investment was led by Korean electronics manufacturing giant JASTech Co. Ltd, best known for flexible OLED/QLED display. Aeronyde is applying the strategic investment to the development of hardware and systems software for autonomous fleet management.
“In the 21st century, drones will shape global transportation and distribution and redefine the urban landscape, however we’re not there yet,” said Edgar Muñoz, CEO of Aeronyde. “Adoption of unmanned aerial vehicles (UAV) platforms depends wholeheartedly on the public’s acceptance of the technology. As an industry, we must ensure public safety is addressed prior to the commercial unmanned aerial system (UAS) industry boom. This is what Aeronyde is working on.”
Through data collection and partnerships with national, state and private stakeholders, Aeronyde aims to deliver a turnkey UAV service for emergency responders, disaster relief and commercial transportation and logistics in urban areas.
“The market is growing rapidly as more countries are looking at developing UAS regulations,” said Jason Chung, Chairman of JASTech. “We are excited to invest in Aeronyde, a leader in this revolution, as they innovate UAS technology. Aeronyde is helping to build the future of Autonomous Aerial Systems with software and hardware that ensure the responsible management of drones in urban environments.”
Other Partnerships
The Aeronyde team is also working with U.S. regulators and international associations to define standards and protocols for the safe implementation of commercial drone technology. Key partnerships include:
IBM Watson: Aeronyde is conducting rigorous testing, working with IBM Watson to run millions of flight simulations, and collecting data on the security of the system.
Leading technology, systems and regulatory partners: Unifly, the Police Foundation, iSENSYS and the Global UTM Association (GUTMA), a consortium of public and private entities working on unmanned traffic management (UTM) technology.
The Aeronyde system provides flexible infrastructure for aerial logistics, transportation and data collection including:
real-time data analysis to contextually apply sequencing, tasking, local environment, and weather.
machine learning to build situational awareness.
live flight and testing in Aeronyde research and development centers.
The end-to-end Aeronyde hardware and software system includes:
A free Cognizant Autonomous Systems for Safety Critical Applications (CASSCA) Workshop will be held 8:30 a.m.-5:30 p.m. on Jan. 29 at the Hyatt Regency Reston in Reston, Virginia. This is scheduled to take place the day before and at the same location as the Institute of Navigation’s International Technical Meeting and Precise Time & Time Interval Systems and Applications (ION ITM/PTTI) 2018 conference.
The workshop consists of a full day of presentations and discussions on the opportunities and challenges associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications by leading experts in the field. Speakers include:
David Corman, Program Manager, Cyber-Physical Systems Program; National Science Foundation (NSF). Dr. Corman’s current research interests are in the field of Cyber Physical Systems (CPS), security for CPS, unmanned systems, manufacturing, and technologies supporting Smart and Connected Communities.
Paul DeBitetto, Vice President, Software Engineering; Top Flight Technologies. Dr. DeBitetto leads all Top Flight’s Software and Embedded Systems Development. That includes product-related flight control, simulation, computing, sensing, data communications, security-related controls and software solutions.
Finch Fulton, Deputy Assistant Secretary for Transportation Policy; Department of Transportation (DOT)
Joao Hespanha, Professor and Chair of Department of Electrical and Computer Engineering; University of California, Santa Barbara. His current research interests include hybrid and switched systems; multi-agent control systems; distributed control over communication networks (also known as networked control systems); the use of vision in feedback control; stochastic modeling in biology; and network security.
Robert Peterson, Professor and Director of Center for Insurance Law and Regulation; Santa Clara University.
Mr. Peterson teaches torts, insurance law and regulation, evidence and products liability, and other courses. He is a past chair of the California State Bar Standing Committee on Insurance Law, and is director of the Law School’s Center for Insurance Law and Regulation.
Signe Redfield, Roboticist and Mission Manager; Naval Research Laboratory (NRL). Dr. Redfield’s primary interests include performance evaluation of autonomous systems, foundations of robotics, and cooperative behaviors for autonomous underwater vehicles.
Giorgio Rizzoni, Professor and Director of Center for Automotive Research (CAR); The Ohio State University. The CAR is an interdisciplinary university research center that conducts research on advanced automotive and transportation technologies and systems engineering, focusing on sustainable mobility, advanced propulsion systems, human safety and the environment.
Steven Rogers, Senior Scientist for Automatic Target Recognition and Sensor Fusion; Air Force Research Laboratory (AFRL). Dr. Rogers serves as the principal scientific authority and independent researcher in the field of multi-sensor automatic target recognition and sensor fusion.
Registration is also now open for the ION International Technical Meeting (ITM) and Precise Time and Time Interval Systems Applications Meeting (PTTI), which begin the next day (January 30-February 1) at the same location. See www.ion.org/itm for more information.
Organized by Professor Zak Kassas from the University of California, Riverside, the workshop will feature presentations and panels by experts and leaders from government (National Science Foundation, Office of Naval Research, Air Force Research Laboratory, Department of Transportation), industry (Google, Daimler, and Ford) and academia (The Ohio State University, UC San Diego, University of Southern California).
The workshop will discuss opportunities and challenges (technical, commercial, ethical, and legal) associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications. Examples include unmanned aerial vehicles (UAVs), self-driving cars and unmanned underwater and surface vehicles.
Kassas, director of the Autonomous Systems Perception, Intelligence, & Navigation Laboratory (ASPIN), leads a team of researchers developing reliable and accurate navigation that exploits existing signals of opportunity, rather than GPS, to meet the stringent requirements of fully-autonomous systems, such as UAVs and self-driving cars.
At the Baidu Create conference in Beijing, Baidu named NovAtel’s partner, AutonomouStuff, as a member of its autonomous driving ecosystem, Project Apollo.
Project Apollo has been initiated to provide an open, comprehensive and reliable software platform for Baidu’s partners in the automotive and autonomous driving industries. Partners can use the Apollo open software platform together with the reference hardware platform to accelerate development of their customized autonomous vehicle solutions.
Based on their extensive experience in autonomous system development, AutonomouStuff will provide the “Apollo Kit” to Baidu Apollo partners. The Apollo Kit includes the vehicle — a Lincoln MKZ with by-wire kit installed — and all hardware, software and services required for an Apollo partner to quickly begin developing their autonomous vehicle.
Accurate and reliable positioning is essential to any autonomous system. NovAtel SPAN GNSS/INS products will provide position, orientation and time as a critical component of the Apollo Kit.
“NovAtel is proud to support Baidu and Project Apollo with our high-precision SPAN GNSS+INS positioning solutions,” said Allan MacAulay, business development manager for NovAtel’s Safety Critical Systems Group, who was at the event in Beijing. “We were thrilled to be included in the off-the-shelf, ready-to-use 1.0 reference vehicle and hardware and Apollo Kit announcements by Baidu and AutonomouStuff at Baidu Create. Our technology is a key component on various Baidu autonomous and mobile mapping vehicles, demonstrating our extensive, long-standing support for Baidu and capability in the autonomous driving space.”
“This is a revolutionary movement that will have a major impact on the way developers utilize technology in the future,” said AutonomouStuff CEO Bobby Hambrick. “Apollo is a breakthrough. What used to take decades can now be available in one single day. NovAtel’s reliable GNSS/INS positioning technology is vital to accelerating autonomy development, and as our long-term partner, we are delighted to extend our collaboration to the Apollo Kit. The relationship between Baidu and AutonomouStuff, where NovAtel provides a key technology, is going to change the industry significantly.”
In early 2015, NovAtel took an important step towards delivering positioning solutions to the automotive and autonomous driving industries for serial production by forming a specialized Safety Critical Systems Group.
The group comprises highly skilled engineers with backgrounds in functional safety, as well as all aspects of GNSS and Inertial Navigation Systems technology. The Safety Critical Systems Group is focused on creating positioning products that will meet the exceptional performance and safety requirements of autonomous vehicles at the necessary production volumes and the required price point.
The government of Australia has launched the first $50 million Defence Cooperative Research Centre (CRC), announced July 6 by the minister for Defence Industry, the Hon Christopher Pyne MP.
The Defence CRC is a collaborative program that brings together academia, publicly funded research agencies and industry (particularly small to medium enterprises) to create an interlocking research and innovation capability focused on driving a Defence outcome.
The first Defence CRC will focus on Trusted Autonomous Systems to deliver game-changing unmanned platforms that ensure reliable and effective cooperation between people and machines during dynamic military operations.
“Existing autonomous and robotic systems that operate in the manufacturing and mining sector are effective in controlled environments, but not suitable for the uncertain situations in which Defence operates,” Pyne said.
“To be effective, Defence needs autonomous systems to be highly trusted, robust and resilient and this initiative will bring together the best researchers from industry and universities to develop the intelligent military platforms of the future.”
The CRC for Trusted Autonomous Systems will receive annual funding of $8 million with a maximum of $50 million over a seven-year period.
The CRC will be chaired by Jim McDowell, a businessman who has had an extensive career in the defence industry, and most recently at the University of South Australia.
“As Chair, Mr. McDowell will be responsible for leading the development of the research program and business plan and work with industry on transitioning the research results into capability outcomes,” Pyne said.
This is the first of several CRCs that the Australian government is announcing. Further CRCs will be established on projects also aligned with priorities in the country’s Next Generation Technologies Fund.
Defence will be a member of each CRC along with universities, research agencies and industry. Participating members will be selected on the basis of their research excellence and technology expertise.
“The CRC environment offers excellent synergies for Defence, industry and universities to collaborate closely on Defence innovation,” Pyne said.
The CRC is an initiative of the Next Generation Technologies Fund which complements the Defence Innovation Hub as the two core initiatives of the new Defence Innovation System outlined in the Government’s Defence Industry Policy Statement. These two signature innovation research and development programs, together with the Centre for Defence Industry Capability, deliver on the Government‘s $1.6 billion commitment to grow Australia’s defence industry and innovation sector.
The May issue of GPS World carries these three expert opinions on the question: How are autonomous vehicles and V2V technologies driving innovation within the GNSS industry?
Chaminda Basnyake
Chaminda Basnyake
Principal Engineer, Market Development,
Locata Corporation
We still have technical and cost versus performance challenges to meet the PNT needs of V2V and AV. Positioning and even timing expectations in deep urban areas are still not met reliably. As a result, ad hoc methods such as HD map-based nav — methods that work but are not scalable — have emerged. Innovations to deal with multipath, signal visibility and geometry are critical. Solutions that enable real-time mapping will be essential for scalable AV deployment.
Curtis Hay
Curtis Hay
Technical Fellow, GPS & Maps,
General Motors
Four key areas the commercial GNSS industry is pursuing include: low-cost, high-volume dual-frequency chipsets; broadly available PPP and network RTK corrections delivered either through mobile IP or satellite; precise maps for highways, urban centers and trunk roads that achieve 10-cm localization relative to WGS-84; and improved integrity monitoring and fault detection. The National Highway Transportation and Safety Administration also released a proposed rule-making with tight standards for GNSS performance: 1.5 meters, 1-sigma confidence.
Jonathan Auld
Jonathan Auld
Director, Safety Critical Systems,
NovAtel
Unlike traditional GNSS applications, automotive positioning requires high-precision accuracy at extremely low cost and size. Most importantly, this performance must be achieved with high reliability while operating in the toughest environments. Solving this positioning challenge is driving innovation in the system engineering of multi-frequency receivers and antennas along with extending performance through sensor fusion with lower cost devices. Additionally, there is significant work in the area of safety and integrity for land-based applications.
Here’s a preview of the V2V countdown article from the May issue, introduced by Chaminda Basnyake, an engineer at Locata Corporation:
The U.S. Department of Transportation (USDOT) released a Notice of Proposed Rulemaking (NPRM) in December 2016 for the deployment of Dedicated Short Range Communications (DSRC)-based vehicle-to-vehicle (V2V) safety applications as part of the connected vehicles (CV) and automated vehicles (AV) initiative. If all goes well, this mean a V2V deployment mandate for new passenger vehicles likely starting in 2021 and reaching all new vehicles within 2–3 years.
Standards required for V2V deployment were published in 2016 or before, including the V2V Minimum Performance Requirements SAE 2945/1, leading the way for commercial product development. The USDOT, which has been the catalyst behind V2V industry R&D starting from the automaker collaboration CAMP (Crash Avoidance Metrix Partnership) in 2001, is conducting CV Pilot programs in New York, Wyoming and Florida. These offer the opportunity for state DOTs, vendors and all other stakeholders to test the technology in real-life scenarios.
Automotive OEMs have been developing this technology for more than a decade, and the NPRM is the beginning of a race toward integrating V2V to production vehicles. Deploying V2V technology requires the close cooperation of OEMs, their suppliers and many other stakeholders.
This article captures the views of major players in the CV marketplace on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on AV technology.