California-based Swift Navigation is partnering with Deutsche Telekom, an integrated telecommunications company based in Bonn, Germany. The partnership brings the precise positioning of Swift’s Skylark Cloud Corrections Services to Telekom’s comprehensive communications infrastructure via its new Precise Positioning product offering.
The Precise Positioning service is available across the United States and Germany, with expansion across Europe underway.
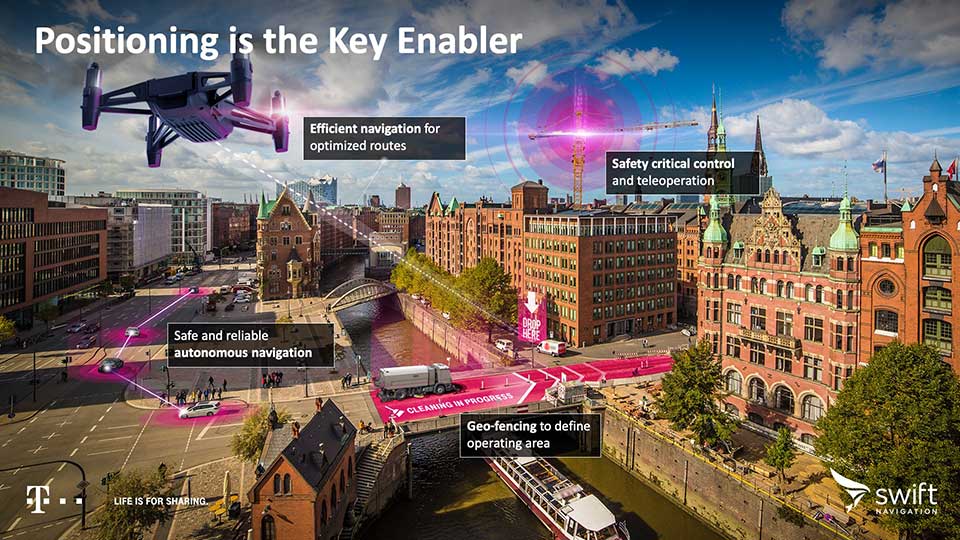
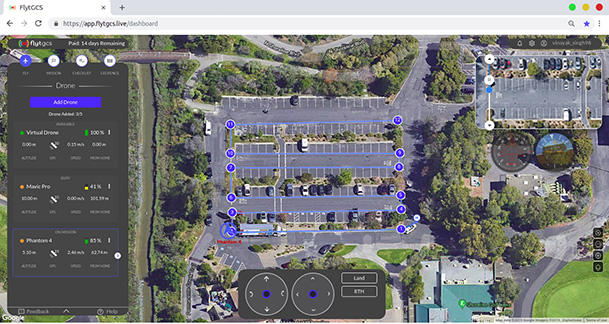
Autonomous applications. Autonomous applications, which rely on positioning accuracy, include self-driving cars, rail, autonomous robotic machine navigation, autonomous flight for unmanned aerial vehicles, last-mile delivery logistics, construction safety, and shared mobile positioning.
Swift and Telekom’s lane-level accurate Precise Positioning is specifically designed for level 2 and 3 automotive applications including advanced driver-assistance systems (ADAS), such as lane assist, highway autopilot, cellular vehicle-to-everything (CV2X) communications and lane level directions.
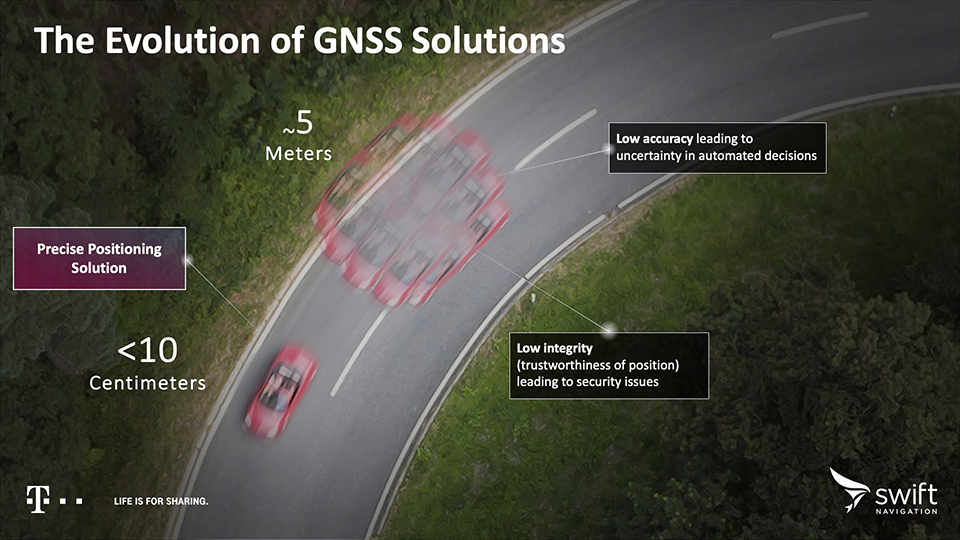
Standard GNSS positioning is accurate to three to five meters — unsuitable for autonomous systems. For higher levels of autonomous capability, high-precision localization is required to deliver accuracy down to the centimeter. This partnership brings the <10-centimeter accuracy of Swift’s precise positioning solution to Telekom customers.
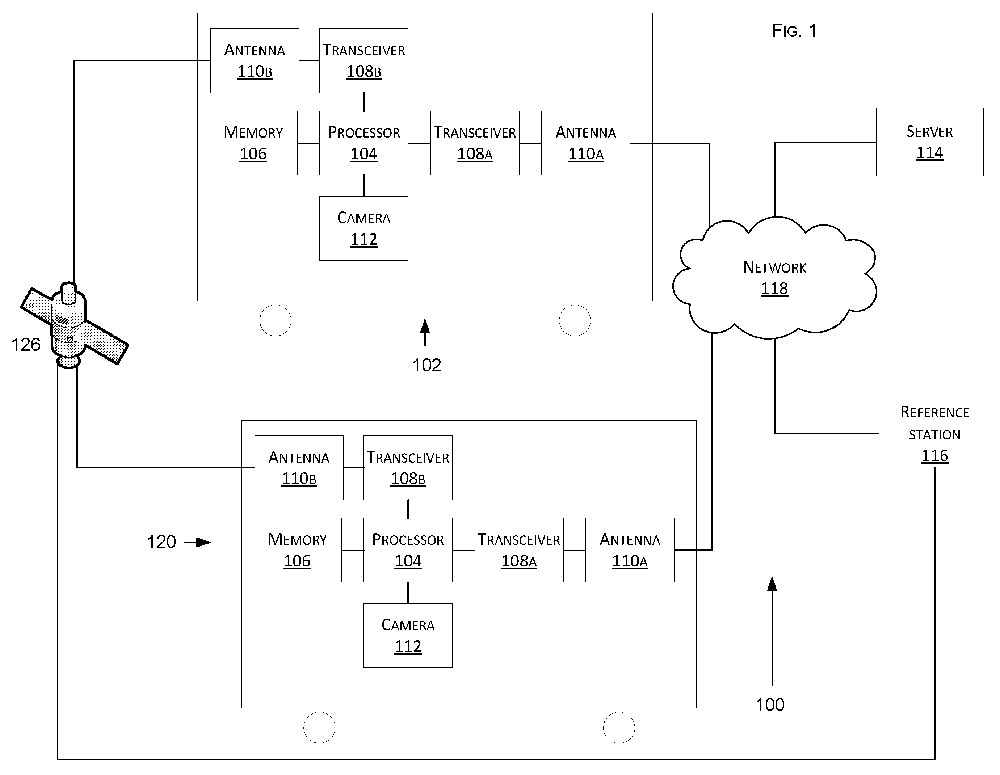
Precise Positioning is a wide area, cloud-based GNSS corrections service that delivers real-time high-precision positioning to autonomous vehicles. Built from the ground up for autonomy at scale, the Precise Positioning service enables lane-level positioning, fast convergence times and high integrity and availability required by mass market automotive and autonomous applications.
Hardware-Independent. The service is hardware-independent, allowing customers to choose their GNSS sensor ecosystem. It delivers a continuous stream of multi-constellation, multi-frequency GNSS corrections for a high-availability service that combines lane-level accuracy and world-class integrity at a continental scale.
“Swift Navigation is excited to continue our work with Telekom to bring Swift’s precise positioning GNSS expertise to Telekom’s broad customer base,” said Timothy Harris, co-founder and CEO at Swift Navigation. “This partnership is just the beginning of our joint service offering for autonomous vehicles across the EU.”
“Precise Positioning opens the doors to true autonomous mobility. Precise, safe and in the future also cross-national,” said Hagen Rickmann, responsible for business customers at Deutsche Telekom. “We are thus offering our customers an easy entry into the autonomous future. And we’re not just thinking of self-driving vehicles: The flexible offer is also suitable for use with drones and is even of interest to crane operators on construction sites.”
For ease in testing and integration, Swift and Telekom have created a Precise Positioning Evaluation Kit. The kit includes two workshops (onboarding and result review), testing hardware and software to connect to the Precise Positioning network for a three-month evaluation period and is available to purchase.