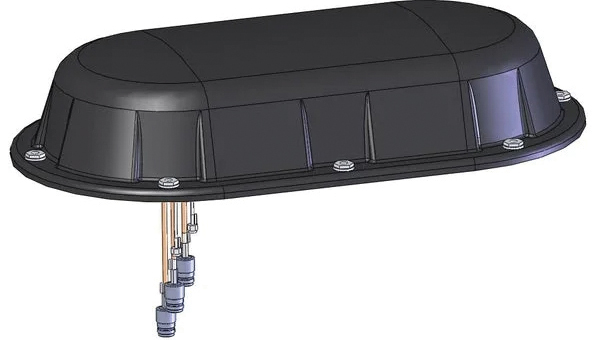
InfiniDome is set to debut its Aura GNSS protection system at XPONENTIAL Europe in Düsseldorf, Germany, March 24-26.
Aura supports two to four antennas and protects two GNSS frequency bands while passing two additional bands. The system can generate up to three nulls per protected band, allowing it to suppress multiple interference sources at once. The product is offered in two configurations: an enclosed version weighing 500 grams and an OEM version at 375 grams, the latter designed for integration into platforms where size and weight are constraints.
The company will also present IroNav, a navigation solution developed jointly with Wonder Robotics that combines InfiniDome’s anti-jamming technology with Wonder Robotics’ visual navigation and autonomy software. The layered architecture is intended to keep autonomous systems navigating when GNSS signals are degraded or unavailable entirely. IroNav is also making its European debut at the show.
InfiniDome recently entered the Indian market through a partnership with Globaz Technologies, which will serve as the company’s official partner in the country. The agreement is aimed at addressing demand for navigation resilience technology in India’s defense and unmanned systems sectors.
XPONENTIAL Europe is scheduled to take place this month in Düsseldorf, Germany.
With full multi-constellation, multi-frequency GNSS signal protection, the GAJT-AE3 provides assured positioning, navigation and timing (PNT)
Hexagon | NovAtel has launched the latest addition to its battle-proven GNSS Anti-jam Antenna Technology (GAJT) lineup: GAJT-AE3. The GAJT-AE3 emerges in response to the escalating power and sophistication of jamming techniques that disrupt satellite-based navigation systems, a concern highlighted by current worldwide geopolitical conflicts.
As jammers become more powerful and low cost, with the capability of targeting a wider range of GNSS frequencies, there is a critical need for next-generation functionality and reliability.
To address this, the GAJT-AE3 protects all major GNSS constellations with full multi-constellation, multi-frequency coverage. This significant advancement in jamming protection — in a compact format — ensures reliable PNT in demanding airborne environments.
“This is a revolutionary expansion in our battle-proven anti-jam solutions designed specifically for space-constrained platforms,” said Stig Pedersen, president, Aerospace & Defence Division, Hexagon. “The GAJT-AE3 offers unparalleled signal coverage and multi-jammer direction finding for superior protection and heightened situational awareness.”
The GAJT-AE3’s antenna electronics mitigate interference by creating up to seven nulls per band in the direction of jammers, providing significant anti-jam protection even in dynamic multi-jammer scenarios. The output is a protected radio frequency signal, free from jamming and suitable for input to modern and legacy GNSS receivers.
Protecting and supporting all GNSS frequencies, including L-band corrections and Iridium PNT, the GAJT-AE3 is an easy-to-integrate, compact unit suitable for use on a variety of platforms, from UAVs to complex weapons. It can be paired with a range of antennas from the Hexagon | Antcom portfolio, including custom options.
Hexagon | NovAtel’s GAJT-AE3 is now commercially available.
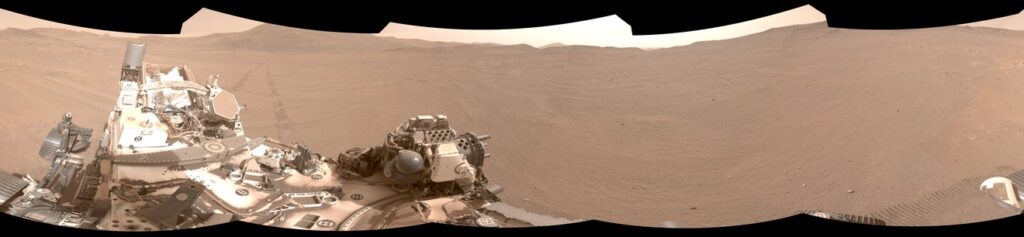
A new technology called Mars Global Localization lets Perseverance determine precisely where it is, without human help.
Imagine you’re all alone, driving along in a rocky, unforgiving desert with no roads, no map, no GPS, and no more than one phone call a day for someone to inform you exactly where you are. That’s what NASA’s Perseverance rover has been experiencing since landing on Mars five years ago. Though it carries time-tested tools for determining its general location, the rover has needed operators on Earth to tell it precisely where it is — until now.
A new technology developed at NASA’s Jet Propulsion Laboratory in Southern California enables Perseverance to figure out its whereabouts without calling humans for help. Dubbed Mars Global Localization, the technology features an algorithm that rapidly compares panoramic images from the rover’s navigation cameras with onboard orbital terrain maps.
Running on a powerful processor that Perseverance originally used to communicate with the Ingenuity Mars Helicopter, the algorithm takes about two minutes to pinpoint the rover’s location within some 10 inches (25 centimeters). Mars Global Localization was first used successfully in regular mission operations on Feb. 2, then again Feb. 16.
“This is kind of like giving the rover GPS. Now it can determine its own location on Mars,” said JPL’s Vandi Verma, chief engineer of robotics operations for the mission. “It means the rover will be able to drive for much longer distances autonomously, so we’ll explore more of the planet and get more science. And it could be used by almost any other rover traveling fast and far.”
This panorama from Perseverance is composed of five stereo pairs of navigation camera images that the rover matched to orbital imagery in order to pinpoint its position on Feb. 2, 2026, using a technology called Mars Global Localization. (Credit: NASA/JPL-Caltech)
The upgrade is especially valuable given how well Perseverance’s auto-navigation self-driving system has been working. Enabling the rover to re-plan its path around obstacles en route to a preestablished destination, AutoNav has proved so capable that the distance Perseverance can drive without instructions from Earth is largely limited by the rover’s uncertainty about its whereabouts. Now that it can stop and determine its exact location, Perseverance can be commanded to drive to potentially unlimited distances without calling home.
Implementation of Mars Global Localization comes on the heels of another innovation from the Perseverance team: the first use of generative artificial intelligence to help plan a drive route by selecting waypoints for the rover, which are normally chosen by human rover operators. Both technologies enable Perseverance to travel farther and faster while minimizing team workload.
Beyond visual odometry
Unlike on Earth, there is no network of GPS satellites in deep space to locate spacecraft on planetary surfaces. So missions — whether robotic or crewed — must come up with other ways to determine their location.
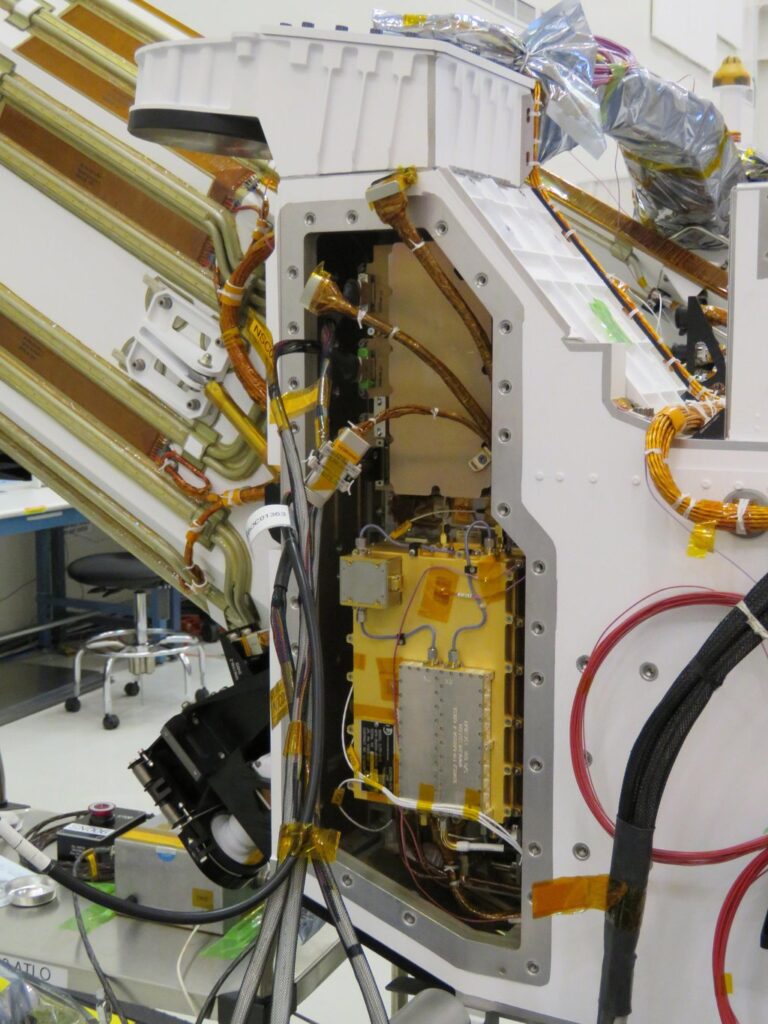
The Mars Global Localization algorithm runs on a fast commercial processor in the Helicopter Base Station — the upper, gold-colored box that was integrated into NASA’s Perseverance rover in a clean room. Perseverance used the base station to communicate with the now-retired Ingenuity Mars Helicopter. (Credit: NASA/JPL-Caltech)
As with NASA’s previous Mars rovers, Perseverance tracks its position using what’s called visual odometry, analyzing geologic features in camera images taken every few feet while accounting for wheel slippage. But as tiny errors in the process add up over the course of each drive, the rover becomes increasingly unsure about its exact location. On long drives, the rover’s sense of its position can be off by more than 100 feet (up to 35 meters). Believing it may be too close to hazardous terrain, Perseverance may prematurely end its drive and wait for instructions from Earth.
“Humans have to tell it, ‘You’re not lost, you’re safe. Keep going,’” Verma said. “We knew if we addressed this problem, the rover could travel much farther every day.”
After each drive comes to a halt, the rover sends a 360-degree panorama to Earth, where mapping experts match the imagery with shots from NASA’s Mars Reconnaissance Orbiter (MRO). The team then sends the rover its location and instructions for its next drive. That process can take a day or more, but with Mars Global Localization, the rover is able to compare the images itself, determine its location, and roll ahead on its preplanned route.
“We’ve given the rover a new ability,” said Jeremy Nash, a JPL robotics engineer who led the team working on the project under Verma. “This has been an open problem in robotics research for decades, and it’s been super exciting to deploy this solution in space for the first time.”
The small team began working in 2023, testing the accuracy of the algorithm they’d developed using data from 264 previous rover stops. The algorithm compared rover panoramic photos to MRO imagery and correctly pinpointed the rover’s location for every single stop.
How Ingenuity helped
Key to Mars Global Localization is the rover’s Helicopter Base Station (HBS), which Perseverance used to communicate with the now-retired Ingenuity Mars Helicopter. Equipped with a commercial processor that powered many consumer smartphones in the mid-2010s, the HBS runs more than 100 times faster than the rover’s two main computers, which, built to survive the radiation-heavy Martian environment, are based on hardware introduced in 1997.
As a technology demonstration designed to test capabilities, the Ingenuity mission was able to risk employing more powerful commercial chips in the HBS and the helicopter even though they hadn’t been proven in space. It paid off: Expected to fly no more than five times, the rotorcraft completed 72 flights.
The power of the HBS processor inspired Verma to look for ways the Perseverance mission might harness it. “It’s almost like a gift. Ingenuity blazed the trail, proving we could use commercial processors on Mars,” Verma said.
Tapping into the HBS computer has had its challenges. To address reliability, the team developed a “sanity check”: The algorithm runs on the HBS multiple times before one of the rover’s main computers checks to ensure the results match. During testing, the team repeatedly found the rover’s position was off by 1 millimeter. They discovered damage to about 25 bits — a minuscule fraction of the processor’s 1 gigabyte of memory — and developed a solution to isolate those bits while the algorithm runs.
Alongside the broader Mars Global Localization process, the team’s sanity check and memory solutions are expected to find new uses as faster commercial processors are employed in future missions. In the meantime, the team has already turned their sights to the Moon, where difficult lighting conditions and long, cold lunar nights make knowing exactly where spacecraft are located all the more critical.
More about Perseverance
NASA’s Jet Propulsion Laboratory, which is managed for the agency by Caltech, built and manages operations of the Perseverance rover on behalf of NASA’s Science Mission Directorate in Washington, as part of NASA’s Mars Exploration Program portfolio. Learn more about Perseverance.
Collaboration focused on enabling plug-and-play, GPS-denied navigation capabilities for next-generation maritime platforms
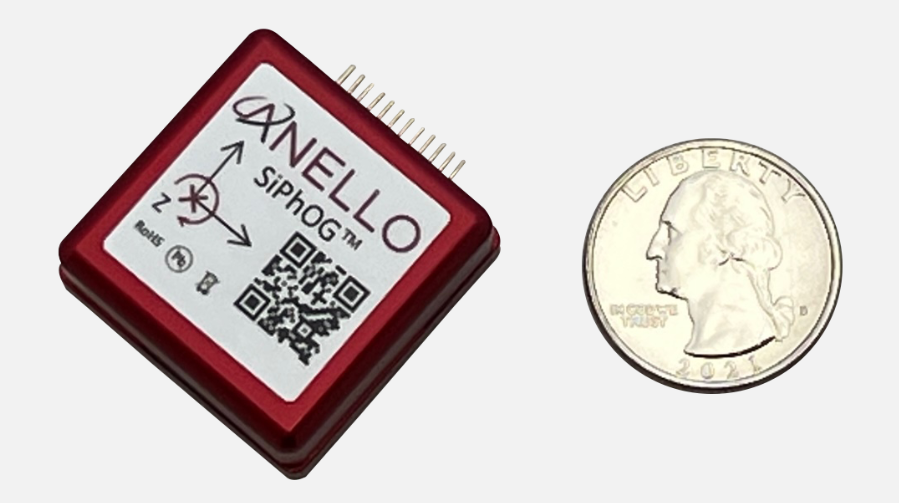
Anello Photonics and Mythos AI are accelerating deployment of resilient, plug-and-play navigation solutions for the maritime sector. The collaboration brings together Anello’s advanced inertial sensing technology and Mythos AI’s intelligent autonomy software to address the growing need for resilient navigation in GPS-challenged environments.
Anello is creator of the Silicon Photonics Optical Gyroscope (SiPhOG). By combining SiPhOG-based inertial navigation with advanced sensor fusion and AI-driven collaborative autonomy, Anello and Mythos AI are delivering a fully integrated, plug-and-play solution that maintains performance when satellite signals are degraded or unavailable. It is designed to drop seamlessly into both next-generation and legacy maritime platforms. A multi-mission open systems architecture enables scalable deployment across defense, commercial and hybrid maritime operations.
Strategic focus on maritime autonomy and USVs
The initiative is particularly relevant to the rapidly evolving unmanned surface vehicle (USV) market. As USVs take on expanded roles in offshore energy, maritime security, hydrography, environmental monitoring and defense missions, complete end-to-end dependable navigation is essential to safe and effective operations.
A resilient, GPS-independent navigation capability enables:
greater operational assurance in GPS-denied or contested maritime environments
enhanced autonomy and mission continuity during signal disruptions
reduced integration complexity for OEMs and system integrators
scalability across a broad range of vessel sizes and mission profiles.
Anello and Mythos AI will collaborate with OEMs, integrators and end users to align the solution with evolving operational and regulatory demands.
Crowded cities with stacked road systems and reflective architecture may offer impressive skylines, but for GNSS receivers, they create some of the harshest conditions on Earth. For technologies that depend on stable, trustworthy positioning, real-world testing in these challenging environments is essential. Here, Jez Ellis-Gray, product manager at Focal Point Positioning, a provider of GNSS positioning software, examines what recent field deployments reveal about the future of reliable GNSS.
Urban environments present unique constraints that no laboratory or simulation can perfectly replicate. A lab test may miss the thousands of variables that influence signal behaviour in a living, breathing city or a dense forest road. This matters most for automotive applications, where positioning must remain stable and trustworthy to support driver assistance and higher levels of automation. That is why we conducted field trials across Germany and Japan, evaluating FocalPoint’s S-GNSS Auto software running on STMicroelectronics’ Teseo GNSS receivers in challenging real-world conditions.
This testing demonstrated that GNSS performance in the real world is often determined not by peak accuracy under ideal conditions, but by the system’s reliability when satellite signals are distorted, reflected or partially obstructed.
This distinction — between accuracy and reliability — is becoming increasingly important for sectors where positioning plays a safety-critical role, including automotive.
Understanding the complexity of real environments
Germany’s combination of modern architecture and medieval street layouts made it a good place to test GNSS upgrades against standard technology. A city like Frankfurt offers a nice mix of glass facades, narrow streets and tall buildings – conditions that tend to create multipath interference.
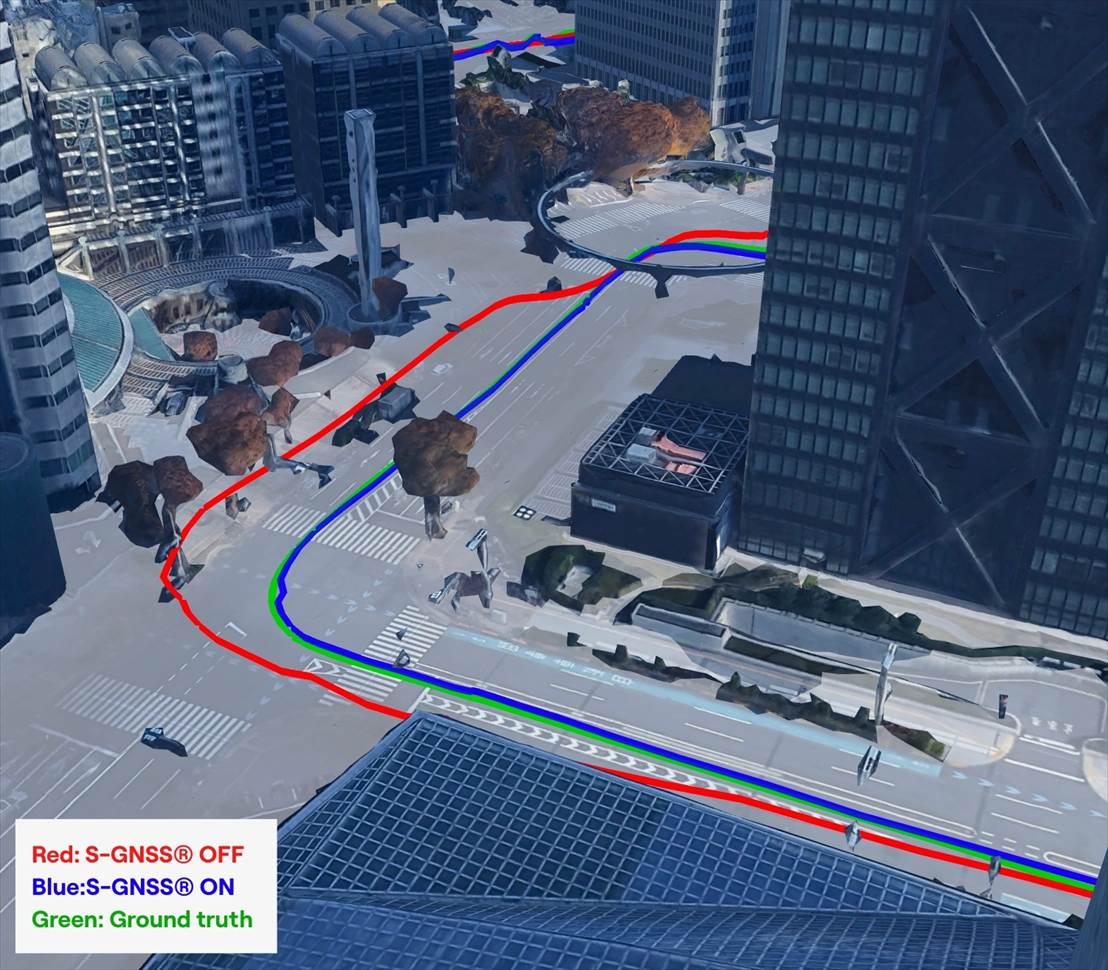
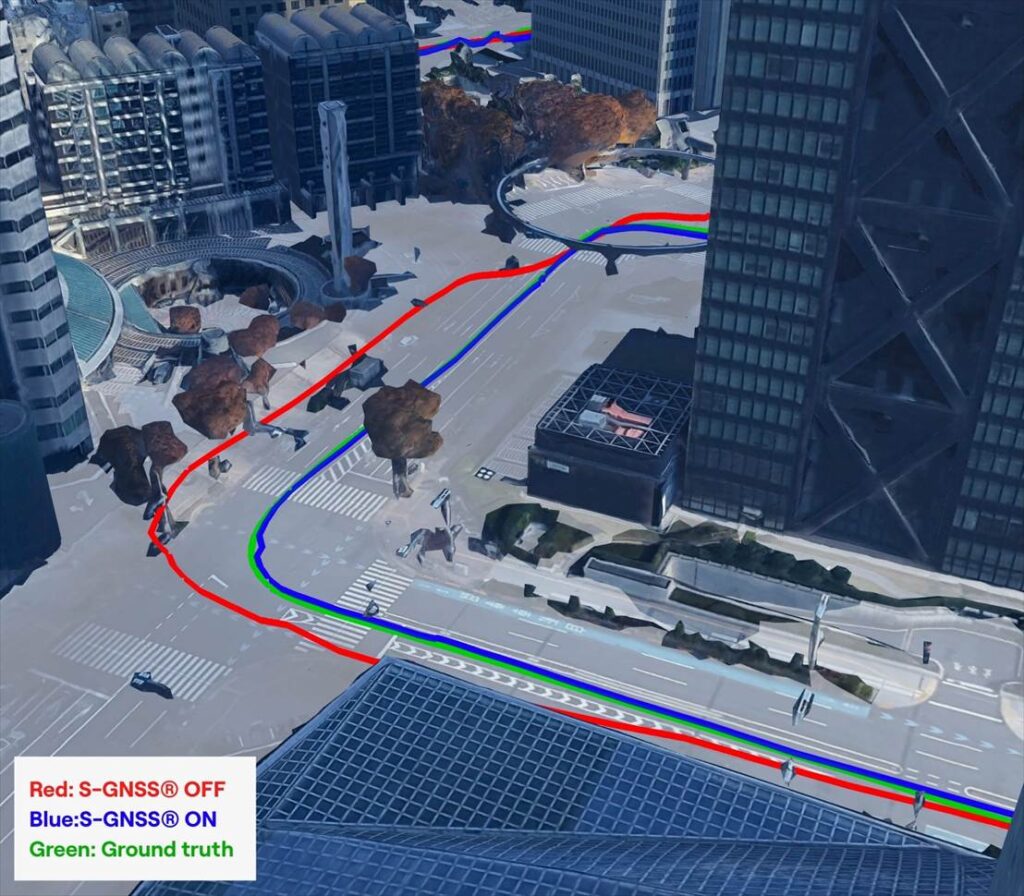
During our recent field testing, conventional GNSS receivers frequently suffered from severe degradation of position accuracy when compared to a state-of-the-art ground truthing system. The standard receiver positions will often drift away from the travelled path, often through buildings or even onto parallel roads.
As accuracy deteriorates, the receiver can usually tell that the input information is poor, and output a warning for a larger estimate of error. This is a useful warning flag for AVs and allows for safe handover back to the human driver. However, in some cases, the reflected signals cause the miscalculation to be assumed correct. This “confident but wrong” GNSS is a much greater threat to autonomous driving, as the vehicle may make a dangerous decision based on this false information.
In contrast, the S-GNSS Auto enhanced receiver was able to maintain lane-level accuracy far longer, even in areas where intense reflections would normally overwhelm the satellite data. In multipath-heavy environments, S-GNSS on Teseo receivers showed an accuracy improvement of up to 4x. These findings reinforced our belief that, as automation increases, consistency and reliability will be more valuable than peak accuracy.
A navigation system that performs well on open motorways but struggles on urban roads will not scale safely to higher levels of vehicular automation. This is particularly relevant as the industry transitions from Level 2 to Level 3 autonomy, marking the point at which a vehicle takes full responsibility for the driving task in defined conditions, allowing the driver to disengage temporarily while the system manages safety-critical decisions.
This shift is expected to unlock significant commercial value. A 2023 report by McKinsey predicted that advanced driver assistance and autonomous driving features could generate between $300 billion and $400 billion in annual revenue by 2035, driven by software services and subscription-based functionality that depend heavily on reliable positioning. Unlocking this potential will depend on the next generation of vehicles having robust positioning systems, as users are unlikely to pay ongoing subscriptions to systems that repeatedly require human intervention or where safety concerns linger.
Japan: one of the world’s most challenging environments
If Germany represents a demanding test bed, Japan pushes GNSS to the extreme. Tokyo offers some of the toughest conditions anywhere in the world due to its towering buildings, multilevel road networks and narrow corridors that create intense multipath environments, so it was a natural choice for our next field test.
The results showed that in particularly dense districts such as Shinjuku, standard GNSS receivers often struggled to maintain a coherent position solution. Reflections from glass towers, elevated highways and rail lines produced non-line-of-sight signals that overwhelmed conventional algorithms.
S-GNSS Auto, integrated onto STMicroelectronics’ Teseo receivers, demonstrating improvements in vehicle positioning accuracy. (Data from Shinjuku, Tokyo)
However, receivers equipped with S-GNSS’s advanced signal-processing techniques demonstrated significantly improved performance. These upgraded devices maintained a stable positioning where traditional systems faltered, avoiding errors that would cause an automated system to disengage or provide dangerously erroneous positions
This improved reliability has direct implications for safety and user experience, which vehicle OEMs will no doubt welcome. In driverless vehicles, GNSS problems that trigger sudden driver handovers or interruptions to hands-free modes, are likely to erode trust and reduce the likelihood of subscription renewals, as the end user will judge the product less by its peak performance and more by its dependability in everyday situations.
Field testing and the future of positioning technology
As cities evolve, buildings grow taller and mobility systems become more congested, the challenges facing GNSS will only increase. As such, automotive OEMs are rightly starting to demand real world results, not just in ideal conditions (static, open sky) but in the worst conditions.
Manufacturers increasingly recognise that positioning is now a foundational technology that underpins safety, automation and customer experience. Investments in more reliable GNSS systems are therefore not marginal enhancements but essential enablers of future services. For companies developing navigation and sensing technology, real-world testing offers a unique opportunity to understand how systems react to chaotic, imperfect environments. It provides granular insight into where and why positioning fails, and how these software-based enhancements can bridge the gap. By validating these solutions in the world’s toughest GNSS environments, developers can offer manufacturers greater confidence in deploying advanced features across global markets.
You can request an evaluation kit here or download the full results report of our latest testing here.
Belgium company Agilica is offering a GNSS-independent onboard positioning system using ultra-wideband (UWB) technology. The system enables precise, autonomous drone navigation and landing, even in dynamic, GNSS-denied environments or on moving targets.
The company says the system achieves centimeter accuracy in real time, enhancing safety and precision. It supports multiple drones and mobile assets in dynamic conditions.
Developed in 2018 as a research and development initiative at the Royal Military Academy in Brussels, Agilica has evolved into a company focused on developing high-accuracy positioning and navigation solutions for drone and robotic applications.
A roundup of recent products in the GNSS and inertial positioning industry from the January-February 2026 issue of GPS World magazine.
Autonomous
1. Delivery Drones
Volatus deploys medical supplies in Canada
Image: Trimble
Volatus Aerospace has integrated the Trimble PX-1 RTX solution into its commercial delivery drone service to achieve accurate and robust positioning and heading. The Trimble module provides Volatus’ clients with a turnkey solution for highly accurate aerial data acquisition and fully remote drone operations in real-world missions, including beyond visual line of sight (BVLOS). The PX-1 RTX uses Trimble’s CenterPoint RTX corrections along with compact, high-performance GNSS-inertial hardware to deliver real-time, centimeter-level positioning and highly precise inertial-derived true heading measurements. This technology reduces operational risks associated with poor sensor performance or magnetic interference by providing enhanced positioning redundancy.
For border protection and long-range surveillance missions
Image: CopterPIX
The ERE95 Mini by CopterPIX operational platform is fully capable of GNSS-denied missions and integrates a long-range, anti-jamming communication system supporting distances of more than 20 km. It has an endurance of 2 hours and can carry up to 5 kg of payload for up to 1 hour. It also has integrated daylight and thermal imaging for advanced surveillance. With a fully foldable frame, the platform collapses into a backpack-sized kit, making it suitable for rapid mobility and field operations. Its modular “puzzle” architecture allows quick adaptation of SDR modules, optical payloads, and navigation solutions, enabling mission-specific configurations. To support rapid field deployment, the ERE95 Mini features a mechanical and electrical quick-connect interface, allowing operators to switch payloads in seconds and maintain continuous operational readiness across all missions.
Integrated into long-endurance unmanned aircraft system
Image: AeroVironment
AeroVironment has integrated its visual navigation system (VNS) kit with the Puma Long Endurance (LE) small unmanned aircraft system, delivering GNSS-denied navigation capability. The VNS kit uses advanced computer vision and onboard processing to deliver precise, GNSS-independent navigation. Using a suite of downward-facing sensors, cameras and onboard computing, the VNS kit performs visual inertial odometry to capture and analyze terrain imagery, estimating true aircraft position in real time. The system fuses continuous visual data from the cameras with motion inputs from onboard inertial sensors to calculate precise position, velocity and orientation — allowing the aircraft to know where it is and where it is going when GNSS is not available. It automatically transitions between GNSS-enabled and GNSS-denied modes with zero pilot input, ensuring uninterrupted mission continuity in contested environments.
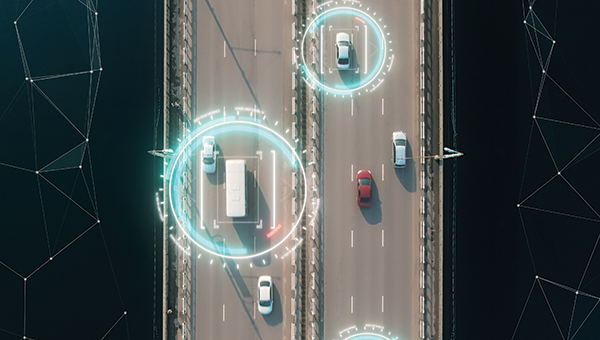
Low power, small footprint setup for close-airspace awareness
Photo: MatrixSpace
The Portable 360 Radar is a rugged, easily transportable radar kit that delivers reliable close-airspace awareness with panoramic coverage for rapid-response counter-drone operations, from safeguarding stadiums and large public gatherings to border security and battlespaces. The MatrixSpace platform unifies threat awareness across multiple networked Portable 360 Radar systems and other sensors, without compromising local operation. By combining AI edge processing with MatrixSpace AiCloud Enterprise software, central command centers get an enhanced common operating picture and deep airspace activity analytics to assure public safety.
The SatLab SL8 Laser RTK GNSS receiver combines dual cameras, GNSS, an IMU and visible laser technology to make surveying faster and easier. With non-contact measurement, image-assisted targeting, CAD live-view stakeout, and a built-in LoRa radio. It ensures smooth, reliable work even in complex or GNSS-limited environments. The SL8 achieves 2 cm accuracy within 10 meters and enables efficient data collection across bridges, tunnels, riverbanks, and other sites where traditional GNSS methods are restricted. It features image-assisted targeting through SatSurv software, displaying laser points directly on real-time images for quick and precise aiming. Its automotive-grade IMU requires no manual calibration or initialization and enhances measurement accuracy by up to 40% in GNSS-challenged areas. A built-in multi-protocol LoRa transceiver provides stable transmission beyond 15 km and compatibility with multiple RTK brands. The integrated CAD and visual stakeout functions combine live imagery with CAD data, allowing users to visualize target points on site and increase layout efficiency by up to 50%.
A complete precision mapping solution for the utility and critical infrastructure industries worldwide is the goal of a partnership between ProStar Holdings and Tersus GNSS. The partnership will integrate Tersus’s survey-grade GNSS receivers with ProStar’s PointMan Underground Utility Mapping Software, providing an affordable, field-ready solution. The partnership will use ProStar’s LinQD open API integration platform, which is designed to enable seamless interoperability between emerging technologies and legacy systems, creating a robust global ecosystem for geospatial intelligence, uniting equipment manufacturers and service providers under the initiative.
The MVP S1 RTK-SLAM handheld 3D laser scanner uses GNSS through an AI-driven RTK-SLAM workflow, as well as lidar data with imagery from dual 48-megapixel panoramic cameras. The combination provides survey-grade results in both GNSS-denied and open environments. The system achieves centimeter-level accuracy outdoors and maintains performance indoors or underground through SLAM processing. TimeSync 3.0 synchronizes the hardware, aligning sensor data at the microsecond level and supporting consistent datasets and reliable post-processing. A mobile application provides users with real-time feedback, including previews of colorized point clouds while scanning, as well as basic scan reports on site. This feature helps operators verify data completeness and quality before leaving the field, reducing the need for repeat visits. The MVP S1 supports 3D gaussian splatting (3DGS), enabling creation of textured, photorealistic 3D models. This capability is useful for building information modeling, construction progress monitoring, underground surveys, forestry analysis and industrial site documentation.
The MALÅ GeoDrone 600 and Zond Aero 600 NG are two new high-resolution ground-penetrating radar (GPR) systems for UAVs. They significantly enhance high-resolution subsurface investigations with drones, supporting applications in engineering surveys, utility mapping, archaeology, environmental studies and geophysical research. They enable surveyors to capture consistent, high-quality subsurface data in areas difficult, slow or unsafe to access with traditional ground instruments. Operating at 600 MHz, the antennas offer a balance between penetration depth and fine near-surface resolution. Typical penetration from the drone is up to 2 meters, depending on surface conditions, while SPH Engineering’s True Terrain Following ensures stable antenna height to maintain data quality and repeatability.
For high-precision surveying, photo surveys and 3D modeling
Image: Aurora Navigation
The Astra1 Mobile Visual RTK is a professional-grade GNSS receiver engineered to redefine high-precision mobile data acquisition. It is built to meet the demand for highly portable, reliable, high-precision tools that simplify complex field operations. At 60 grams, the Astra1 is an ultra-compact solution designed to deliver reliable, centimeter-level positioning and advanced 3D mapping capabilities through seamless integration with a smartphone and the proprietary Anypos App. Accuracy is RTK 8mm+1PPM horizontally, 15mm+1PPM vertically, photo survey <4 cm (2-15 m distance). The Astra1 allows users to capture photos with precise RTK coordinates, enabling the creation of accurate 3D models for detailed construction verification and digital twinning applications.
The AR588MA is a 5G-advanced (5G-A) automotive-grade cellular module that integrates dual-band GNSS supporting both L1 and L5 bands with up to 30 Hz output. Based on MediaTek’s latest-generation MT2739 platform, the AR588MA supports 5G-A communication technology and complies with the 3GPP R18 standard protocol. It features both NB-NTN and NR-NTN satellite communication capabilities and supports dual-SIM dual-active (DSDA) technology, offering improved stability and reliability on cellular connections. It also includes intelligent driving scenario recognition. Designed in compliance with the AEC-Q104 Grade 2 automotive standard, it delivers fast, stable connectivity and reliable security for in-vehicle communication and benefits on-roof applications, such as smart antennas for automotive, with higher-temperature support.
A firmware upgrade to the Xsens Sirius and Xsens Avior IMUs delivers centimeter-level vertical displacement measurements for marine stabilization and control systems. The new Heave feature enables real-time stabilization and wave compensation in a wide range of marine applications. Marine engineers can access comprehensive motion data — roll, pitch, yaw and heave — from a single compact sensor, eliminating the need for external processing or oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The InnovizThree is fully colored long-range lidar with camera that creates a compact sensor-fusion module designed to reduce OEM integration complexity. The solution combines lidar and RGB sensing in a single compact perception module, purpose-built for behind-the-windshield installations, drones, micro-robotics and humanoids. The consolidation of an RGB camera inside InnovizThree reinforces Innoviz’s commitment to scalable, OEM-friendly sensor-fusion perception solutions designed for series production and long-term deployment, with the potential to enable faster deployment and cost savings. The RGB sensing capabilities are factory-aligned with the lidar, enabling precise and consistent visual-to-lidar geometry across production units. This alignment, combined with hardware-synchronized capture, will enable reliable multi-modal sensor-fusion data correlation while reducing calibration effort during vehicle integration.
High-integrity GNSS integration for autonomous driving
Image: Getty Images / iStock / FlashMovie
Swift Navigation is collaborating with Nvidia to enable a scalable, cost-effective approach to autonomous driving by integrating the Nvidia Drive AGX platform with Swift’s globally referenced, centimeter-accurate GNSS positioning. Swift Navigation offloads absolute localization to the GNSS sensor stack using its Swift Automotive Suite. The suite is a complete, modular software solution for safe, high-integrity precise vehicle localization that combines the centimeter-level Skylark Precise Positioning Service with the Starling positioning engine, software that fuses raw GNSS data and corrections with IMU and wheel odometry to deliver high-integrity, centimeter-accurate positioning (PVT). By using Swift’s high-precision stack for lane-level positioning, the vehicle’s optical sensors focus on obstacle detection and safety, lowering system cost and complexity.
Sinclair’s new SM 5G Family Tier features the SM714 and SM2601 series antennas. The multi-band, multi-port antennas are engineered to deliver superior connectivity, reliability and versatility for GNSS and other mission-critical wireless transportation applications. The SM714 is a 4-in-1 low-profile customizable transit antenna that combines 5G/LTE, Wi-Fi and tri-band GNSS coverage in a single compact form. Supporting 617–5925 MHz, it enables seamless operation across all major 5G and LTE bands. It is suitable for vehicles, fleet systems and connected mobility applications requiring a discreet, high-performance solution. The SM2601D is a 5-in-1 low-profile customizable antenna that features five independent ports: one for PTC (219–223 MHz), one for Wi-Fi (2400–6000 MHz), one for GNSS, and two full-band cellular ports (694–2700 MHz) that support diversity and MIMO operation for multi-radio systems. This dual-cell configuration offers greater throughput, flexibility, and redundancy in complex communication environments.
High-precision depth sensing and real-time velocity measurement
Image: Voyant Photonics
New versions of the Carbon lidar platform add 32-line and 64-line variants for compact, cost-sensitive and compute-limited systems. The new models complement existing 128-line configurations and are optimized for industrial autonomy, robotics, drones and smart infrastructure applications. They offer lower data rates and simplified integration while maintaining core FMCW advantages including velocity measurement, interference immunity and high dynamic range. With line resolutions spanning 32, 64 and 128, original equipment manufacturers and system integrators can tailor performance, bandwidth and compute load to specific use cases, from robotics and automated guided vehicles to drones and embedded edge platforms. The Carbon family’s silicon-photonics architecture integrates beam steering and coherent detection on a single photonic chip. The new variants include high-precision depth sensing and real-time velocity measurement, exceptional ambient light immunity and compact design for industrial and mobile environments.
For automotive track and varied environment testing
Image: VBOX
The NTRIP Base Station from VBOX Automotive combines a multi-constellation, multi-frequency GNSS engine with a built-in networked transport of RTCM via internet protocol (NTRIP) server. The equipment transmits real-time kinematic corrections over radio and cellular or Wi-Fi networks, supporting accurate real-time positioning across wider areas in varied environments compared to traditional radio-only systems. The base station launches in three models, with specifications designed to fit users’ needs. All systems combine quad-constellation, dual-frequency GNSS technology with built-in cellular and Wi-Fi connectivity. Compatible with VBOX 4, VBOX 3iS and external GNSS rovers, the new NTRIP Base Station supports both MSM4 and MSM7 RTCM formats, has up to 24 hours of battery life and is rated to IP67 to handle the demands of long outdoor test sessions. Models include Internal GNSS antenna and 2.4 GHz radio (quick to deploy for short-range applications, for temporary or mobile testing); Internal GNSS antenna, no radio (compact and simple, suitable for NTRIP or semi-permanent installations with external high-power radio masts); and External GNSS antenna, no radio (optimized for permanent installations with tripod-mounted antennas for maximum satellite visibility, supporting NTRIP or external radio).
UAV Navigation-Grupo Oesía, a provider of flight control systems for unmanned aerial vehicles, will collaborate with Poland-based Ekolot Aerospace and Defense (EAD) to integrate its advanced flight control system into Zeus, Ekolot’s new fixed-wing vertical take-off and landing (VTOL) platform.
The collaboration brings together UAV Navigation’s guidance, navigation and control solutions with Ekolot’s vision to create a new generation of VTOL aircraft. The result is Zeus, a family of platforms in a maximum take-off weight (MTOW) range from 100 to 250 kg that combines the aerodynamic efficiency of a fixed-wing design with the versatility of vertical take-off and landing. These features make it useful for civil, defense and security missionsin remote or challenging environments.
The Zeus family aims to fill the gap between small tactical UAVs and heavy MALE-class systems. Zeus is a modular and convertible concept. A single base airframe
accepts VTOL or conventional take-off and landing conversion kits
supports multiple MTOW (150kg, 200kg, 250kg for VTOL and 250kg – 350kg for conventional)
allows for payloads of 30 – 120kg on VTOL versions and up to 150 kg on conventional; Zeus G variant
delivers exceptional endurance of 12–24 hours and a modular, payload-agnostic configuration.
integrates UAV Navigation-Grupo Oesía’s advanced autopilot systems, which provide precise flight control and a wide range of advanced capabilities for dual-use unmanned missions, including robust performance in GNSS-denied environments through high-precision inertial navigation and the visual navigation system.
The companies aim to reinforce their presence in the Polish market and support Ekolot Aerospace & Defense’s expansion across the Latin American region. EAD emphasizes the importance of partnering with a company that not only provides critical systems such as flight control, but also offers a team of highly qualified experts in the unmanned industry.
UAV Navigation-Grupo Oesía reaffirms its commitment to driving innovation in navigation and flight control systems for unmanned aircraft, consolidating its position as a benchmark in guidance, navigation and solutions for UAS executing complex operations in hostile environments and high-demand missions.
A second MOU was signed with Elistair to introduce tethered unmanned aerial systems into Milanion’s ground and maritime architecture.
The agreements focus on maintaining operational capability in environments affected by electronic warfare, GNSS denial, jamming, spoofing and cyber interference, with technical integration work scheduled to begin after the exhibition and demonstrations planned for later in 2026.
The agreement with NovAtel covers land, maritime and air domains and focuses on operations in contested environments where electronic warfare, GNSS denial and cyber interference are present.
Milanion linked the partnerships to requirements raised by defense delegations at WDS 2026 for unmanned systems that remain operational without dependence on vulnerable networks and that support sovereign-ready integration.
Technical integration discussions with both companies are scheduled to begin immediately after the exhibition. Joint development pathways and capability demonstrations are planned later in 2026 as part of a broader connected autonomy architecture.
Milanion Group was founded in 2020 and is headquartered in the UK, with manufacturing in Abu Dhabi. The company develops autonomous and optionally manned systems for military and security missions across land, sea, and air.
The MOU with NovAtel will embed NovAtel assured-PNT and anti-jam technologies into Milanion assets to maintain navigation accuracy and mission integrity during GNSS denial or interference. The integration supports secure routing, guidance stability, and targeting precision even when GPS signals are degraded or disrupted. This capability is relevant for unmanned ground vehicles, maritime conversions, and airborne systems operating in electronically contested theatres. Milanion links the functionality to survivability and operational continuity during electronic warfare and cyber-disruption scenarios.
By combining assured navigation with persistent ISR and resilient communications, the company aims to maintain autonomous mission performance across multi-domain deployments. The approach integrates sensing, navigation, and communications into a unified architecture to address contested-environment requirements identified at WDS 2026.
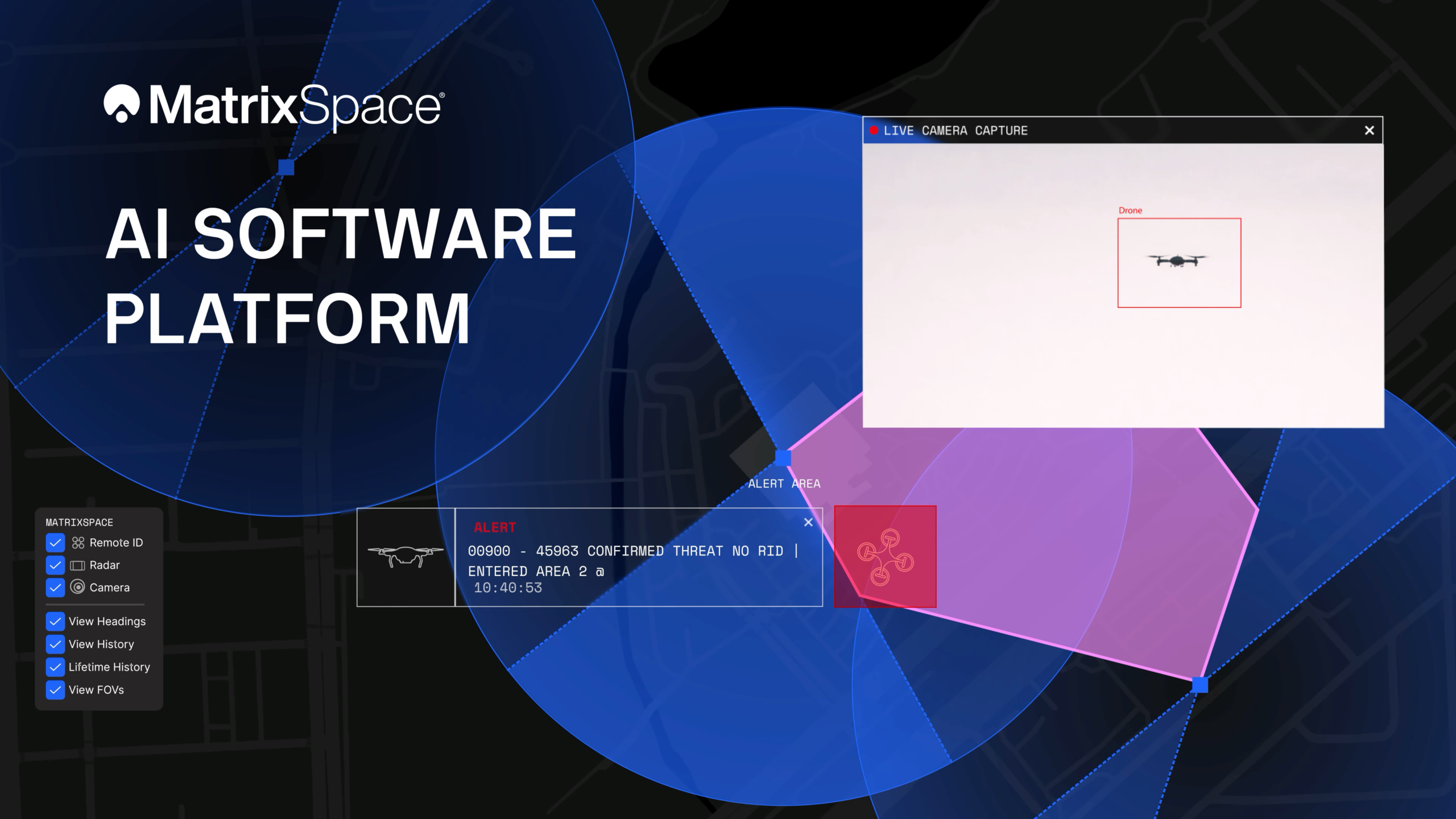
The platform now supports multi-sensor, multi-drone detection in real time for counter UAS applications. It delivers true threat assessment and early warning — detecting, tracking and identifying — to empower on-site and remote operators to make split-second decisions regarding airspace activity. The platform is sensor agnostic and easily integrated into existing systems through open APIs.
The update dramatically improves assessing risk from small, low-flying drones in complex airspace, such as public events, critical infrastructure and battlespaces.
The platform
The MatrixSpace AI Platform consists of MatrixSpace AiEdge, the company’s intelligent sensor operating system, and MatrixSpace AiCloud, a software-as-a-service that collects data from AiEdge-enabled sensors for a unified view of airspace activity. Unlike other offerings retrofitted for AI, MatrixSpace AiEdge and AiCloud are AI-native, making information rapidly actionable and easier to comprehend.
MatrixSpace AiEdge, embedded in every MatrixSpace system, provides actionable intelligence at the point of sensor data collection. It detects, classifies and tracks multiple object types, removing clutter to present a relevant picture of aerial activities, while fusing feeds from different sensors.
AiEdge fuses detections from MatrixSpace radars with complementary sensors such as Remote ID and ADS-B into a single, real-time track. By correlating multi-sensor data at the edge, AiEdge creates a common data representation and cues PTZ (pan-tilt-zoom) cameras for rapid visual confirmation, passing high-confidence tracks to the cloud for enterprise-level analysis.
Sitting above distributed AiEdge deployments, MatrixSpace AiCloud simplifies the management of geographically diverse sensor networks into a single, unified view. Instead of a bank of monitors displaying individual sensor feeds, AiCloud provides operators with clear visibility into low-airspace activity, alerts, and warnings across all protected sites — accessible on any device.
MatrixSpace AiCloud combines fused, real-time data from radar, optical, ADS-B and Remote ID sensors to deliver consistent object tracking and actionable threat intelligence at scale. Within AiCloud, whitelisting and threat classification determine whether objects are friendly, unknown, or hostile, enabling fast, coordinated operator response. Local sensors continue operating autonomously when cloud connectivity is disrupted, with all activity synchronized for review once connectivity is restored.
We usually look for what’s new, with innovative drones emerging and gaining traction in commercial and military applications, but this month, news of the termination of a leading UAV program has sparked interest.
The British Army’s Watchkeeper drone program has long been the subject of criticism over development delays, cost overruns and poor performance. Recent reports that the Watchkeeper fleet could be retired as early as 2025 — though that timeline may now slip to 2027 — have renewed scrutiny of the troubled effort. Perhaps a review of the story behind this drone adventure may be in order.
The UK has been involved with drone operations going back into the 1960s, giving this military force deep experience and expertise in the field. Political support has enabled significant investment over time. When the Watchkeeper program was rolling in 2004-05, the US was moving toward the MQ-9 Reaper project, and military forces around the world were building their own mil-spec UAVs, mostly for surveillance to support military ground operations.
At that time, few commercial drones existed beyond radio-controlled model aircraft flown by hobbyists. The idea was growing in China at that time for DJI and quad-copters, so these multi-use UAVs eventually emerged, and have led to a multitude of outfits elsewhere also making commercially available drones.
When the Watchkeeper program took shape in 2004, developing a custom platform was essentially the only way for the UK to obtain a medium-altitude ISTAR intelligence, surveillance, target acquisition and reconnaissance (ISTAR) drone tailored to its requirements. The Ministry of Defence identified Israel-based Elbit Systems, which produced the Hermes 450 military drone, as a close match. The program was built around an extensively modified version of that aircraft, with the goal of bringing production to the UK
Hermes 450 (Photo: Nehemia Gershuni-Aylho) Watchkeeper-X export version (Photo: U-tacS)
In 2005, the U.K. Ministry of Defence awarded a £775 million contract to U-TacS, a joint venture between Thales UK and Elbit Systems, for the design, manufacture and support of 54 Watchkeeper WK-450 drones. The modifications involved making the UAV all-weather capable, including Thales integrated radar/GPS system for automated landing and take-off (Magic-ATOLS), Thales MASTER SAR/GMTI radar, dual electro-optical/IR cameras, laser designator, and tweaks to the Line-of-Sight radio system, with a satellite link option. Nevertheless, the range of the radio limits operation to within less than 100 miles of the mobile base-station, but it did provide a high-bandwidth, secure, direct, unobstructed wireless link for control and real-time video and targeting data back from the vehicle.
Cost overruns and delays pushed the first flight to 2008 in Israel. Production of the WK-450 was then established at Thales UK, formerly Racal Electronics. The technology transfer between the two companies, separated by more than 2,000 miles, operating across different corporate cultures and exchanging proprietary material, proved more difficult and time-consuming than anticipated.
The program delivered its first aircraft in 2014. Four drone systems flew in Afghanistan during the British troop withdrawal, logging a total of just 140 flight hours. Performance fell short of expectations, particularly the system’s all-weather capability, which proved inadequate in Afghan conditions. The U.S. military encountered similar challenges with sand contamination of helicopters and fixed-wing aircraft during early operations in Iraq and Afghanistan.
As time rolled by, Watchkeeper found some use in Cyprus and in the UK, mostly for training, but problems continued. Between 2014 and 2022 eight vehicles crashed, and most have presumably been written off. Others have apparently experienced unplanned ‘contact with ground’ in more recent times. Faith in the now pretty old drone system has waned with the British forces — even recent political pressure to hand over the remaining fleet to Ukraine has been rebuffed by the Army — maybe too many problems with which to coach Ukraine troops. Watchkeeper is apparently now dismantled for the UK, along with the whole £1 billion investment. But not without gaining a lot of knowledge and operational experience, however an expensive lesson none the less.
The UK has operated MQ-9A Reapers in Afghanistan, Iraq and Syria for more than 18 years, but after the Royal Air Force’s success with this US drone, these too have been retired in favor of the new MQ-9B Protector. The Protector has been customized and brought up to civilian certification standards by the manufacturer General Atomics. There have been similar sad programs with many ground, marine, and air projects around the world, but this has been such a visible and unhappy tale, it’s sad to see it end, but it’s probably a good thing so that other newer, more promising projects can get funding and become successful.
Almost in the same breath, another UK company has already been supplying unmanned cargo aircraft to Ukrainian forces for more than three years. Windracer ULTRA is a twin-prop aircraft that can lift 330 lb for up to 620 miles, with 10 hours of endurance at a ceiling of up to 13,000ft. A newer version can reportedly travel twice as far with more payload.
In Ukraine, the drone has been supplying front-line troop emplacements on a regular basis. The UK has been using ULTRA for surveillance and parachute drop re-supply, middle-mile parcel and cargo delivery to remote destinations, and for aerial surveys in Antarctica and elsewhere.
So, a commercial start-up got there on its own, no direct government funding other than contracted support, and apparently no JV with another company! So does 100% government funded development work better than setting up on your own, borrowing a bunch of cash, and doing it yourself? Mil-spec stuff is special with a limited market, so it’s unlikely that governments will ever be able to pick up finished products that fulfil all needs, but as the U.S. is proving with its bulk buy of off-the-shelf small one-way UAVs, these can meet many requirements.
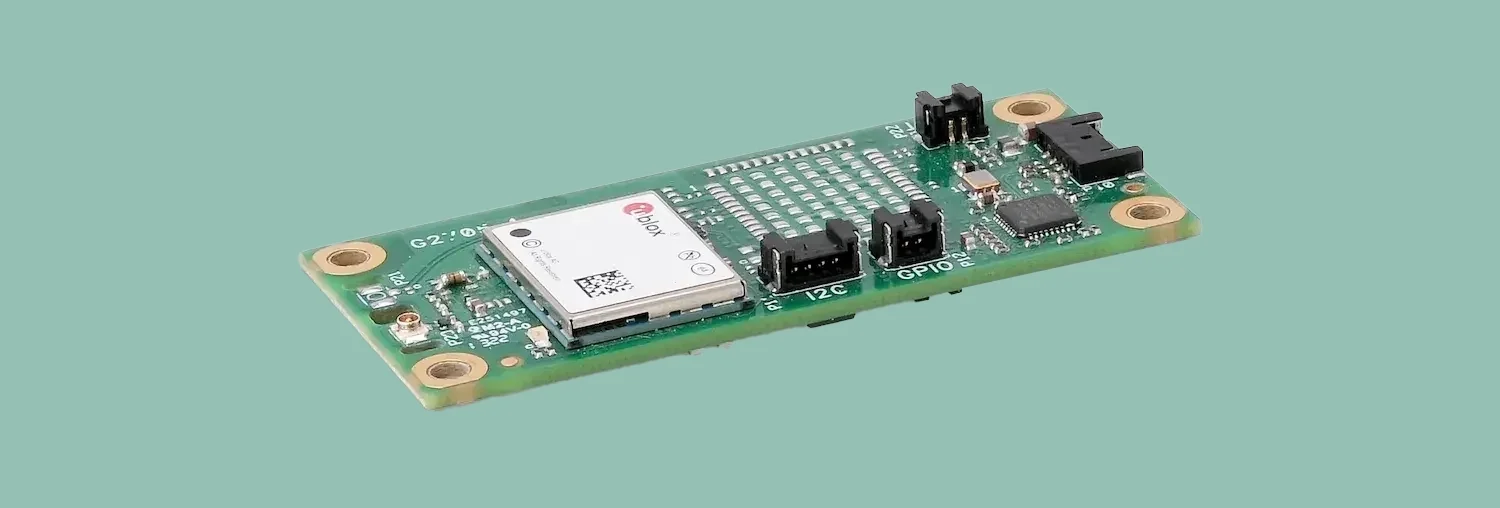
Syslogic has introduced a GNSS expansion board for its rugged embedded computers.
Based on u-blox GNSS technology, the board provides centimeter-level positioning, opening up new applications across industries such as autonomous field management, operation of construction machinery in remote areas, or navigation of automated guided vehicles and autonomous mobile robots.
All-band, multi-frequency reception and HAS-ready
Syslogic’s all-band GNSS board is powered by the u-blox X20 receiver, supporting all major GNSS constellations and frequencies, including L1, L2, L5, L6 and L-band. This enables the use of the upcoming Galileo High Accuracy Service (HAS).
HAS supplements standard Galileo Open Service positioning with correction data transmitted directly over the E6/L6 band. The result is centimeter-level positioning via GNSS signals — without the need for traditional RTK base stations, costly reference networks, or 5G connectivity. HAS is free and globally available.
The u-blox X20-based GNSS board also supports simultaneous multi-frequency reception. With additional frequencies compared to previous models, typical GNSS errors — such as multipath effects and signal blockage — are significantly reduced, particularly in urban environments. This is crucial for applications that demand highly precise and reliable positioning, including surveying, autonomous vehicles, agricultural machinery and industrial automation.
The GNSS board is designed for worldwide use. The integrated u-blox receiver supports modern correction techniques such as RTK, PPP-RTK and PPP. For the first time, it has been fully optimized for PointPerfect Global, u-blox’s proprietary high-precision GNSS correction service, delivering centimeter-level positioning anywhere in the world. This is particularly useful in remote areas without cellular coverage. PointPerfect Global uses advanced PPP-AR technology (precise point positioning with ambiguity resolution), providing corrections via the Internet or L-band satellite transmission. The service achieves convergence times of less than 2 minutes and positioning accuracy within 10 centimeters.
The new expansion board is compatible with Syslogic embedded computers, including both Nvidia Jetson-based and x86-based devices. It is available with either one or two receivers, enabling RTK and heading functions without additional hardware. Vehicles and machines can be positioned with centimeter-level accuracy.
Several Syslogic customers are already using the GNSS functionality in pilot projects, including precision farming and construction machinery monitoring.